Appendice I
Soluzione numerica del moto dei fluidi
Nella presente appendice vengono illustrate brevemente le problematiche inerenti alla soluzione delle equazioni del moto dei fluidi, nonché le basi teoriche dei modelli impiegati nell’analisi numerica dei problemi fluidodinamici. Per approfondimenti si rimanda alle voci [ 1 ] e [ 7 ] della bibliografia, e alla vasta letteratura tecnica in materia.
I.1. Fluidodinamica computazionale
Il flusso reale all’interno delle pompe centrifughe è descritto da equazioni differenziali alle derivate parziali che in generale non possono essere risolte analiticamente. Per questo motivo la progettazione di giranti, diffusori, volute e di tutte le superfici idrauliche è generalmente basata sull’esperienza e su coefficienti ricavati da dati sperimentali, tramite i quali è possibile determinare ad esempio la deflessione del flusso all’interno della girante e stimare le prestazioni e le perdite. Il ridursi dei costi e delle dimensioni dei computer e l’aumentare delle loro prestazioni ha favorito l’implementazione di metodi numerici per la soluzione approssimata delle equazioni di Navier-Stokes: negli ultimi decenni è nata la fluidodinamica computazionale (Computational Fluid Dynamics, CFD), il cui scopo è quello di consentire l’ottimizzazione dei componenti idraulici, l’incremento dell’affidabilità delle previsioni sulle prestazioni delle macchine e quindi la riduzione dei costi delle prove pratiche. Si tratta comunque di una disciplina in fase di sviluppo, i cui risultati necessitano di una validazione pratica.
A seconda dei risultati ricercati con l’analisi fluidodinamica è possibile impiegare differenti modelli per il moto del fluido; i principali sono:
- moto potenziale (irrotazionale, non viscoso); - moto rotazionale non viscoso;
- moto rotazionale viscoso (laminare o turbolento).
Nella letteratura tecnica è possibile trovare ampie digressioni sull’applicazione e i campi di validità dei modelli e dei principali software commerciali; si rimanda in particolare a [ 1 ] della bibliografia. Si possono trovare anche dei paragoni tra le soluzioni fornite da differenti modelli e software per un problema la cui soluzione analitica è semplice e nota (ad esempio, il flusso attraverso un tubo con gomito di 90°).
I metodi più completi per la soluzione del moto dei fluidi sono quelli che risolvono le equazioni di Navier-Stokes in modo tridimensionale; teoricamente essi sono appropriati per tutte le applicazioni, ma la loro complessità ne rende l’impiego non sempre economicamente giustificabile.
Al metodo risolutivo impiegato vanno solitamente associati una legge di parete (wall function) e un modello di turbolenza, come accennato nel paragrafo I.2. La soluzione delle equazioni del moto può dipendere fortemente da essi, anche solo a livello qualitativo.
Prescindendo dal modello impiegato è necessario innanzi tutto costruire un modello CAD 3D il più possibile accurato del componente analizzato, che lo definisca in maniera univoca; esso è alla base della generazione di una griglia di elementi finiti di elevata qualità (“mesh”). Una mesh di qualità grossolana può compromettere l’ottenimento dei risultati, specialmente in zone ad elevato gradiente di velocità come il leading edge delle pale. Le principali caratteristiche di una mesh sono accennate nel paragrafo I.1.1.
Il CAD impiegato nella realizzazione di questa tesi è stato Pro-Engineer Wildfire versione 5.0.
Il codice di calcolo impiegato nelle simulazioni effettuate in questa tesi è Ansys CFX versione 12; esso contiene i principali modelli turbolenti che siano mai stati sviluppati; nel paragrafo I.2 verrà illustrato il modello che è stato impiegato.
Ansys CFX inoltre contiene un software che realizza la mesh del modello CAD importato, e un post-processore, che ha il compito di rendere facilmente interpretabile dall’utente l’enorme quantità di dati calcolati durante l’analisi.
I.1.1. Generazione della mesh, condizioni al contorno, condizioni iniziali
Per risolvere numericamente le equazioni di Navier-Stokes è necessario suddividere il dominio di calcolo in un insieme di celle i piccole dimensioni. Esse costituiscono una griglia, detta mesh, che deve essere di elevata qualità per non falsificare i risultati. Anche la forma delle celle deve essere adeguata, in termini di angoli e proporzioni delle dimensioni.
È possibile impiegare griglie strutturate (costituite da elementi rettangolari che compongono il dominio in maniera uniforme) o non strutturate (composte da tetraedri). Sebbene sia più semplice implementare una griglia non strutturata nel CAD, essa richiede un maggiore tempo di calcolo rispetto a una griglia strutturata: in genere si preferisce quest’ultima. In presenza di domini complessi sarà spesso difficile riuscire a realizzare una griglia completamente strutturata: in questi casi è necessario impiegare griglie combinate.
Uno dei problemi principali della costruzione di una mesh è fare in modo che le linee siano il più possibile perpendicolari alle pareti del dominio; angoli troppo grandi o troppo piccoli possono compromettere l’accuratezza del risultato e anche la convergenza del calcolo.
Alcune raccomandazioni di carattere generale:
- le linee della griglia devono seguire quanto più possibile le streamlines del flusso; - le dimensioni degli elementi della griglia non devono variare troppo velocemente;
- la griglia deve essere raffinata in zone ad elevati gradienti di velocità (molti programmi eseguono questa operazione automaticamente). Una griglia raffinata dà maggiore accuratezza ma anche lentezza del calcolo e problemi di convergenza.
Il passo successivo alla definizione della mesh è quello di imporre le condizioni al contorno del dominio, e le condizioni iniziali del flusso.
Le condizioni iniziali generalmente vengono poste automaticamente nulle dal software; in alternativa possono essere scelte tra le soluzioni delle equazioni differenziali del moto. La convergenza della soluzione non deve dipendere dalla particolare condizione iniziale (ciò non è vero esclusivamente in presenza di comportamento isteretico della curva Q-H: in tal caso sarà necessario un procedimento iterativo).
Per quanto riguarda le condizioni al contorno, il software impone in automatico solamente la condizione di “no-slip” del fluido presso le pareti solide, che comprende:
- componente di velocità relativa parallela alla parete nulla; - componente di velocità assoluta normale alla parete nulla.
- condizioni d’ingresso: è possibile specificare la distribuzione di velocità e di pressione, la portata, il livello di turbolenza e la scala di lunghezza;
- condizioni di periodicità: possono essere sia assiali (ad esempio una girante) che lineari (come nel caso di una tubazione molto lunga). Consentono di ridurre il tempo di calcolo;
- condizioni di simmetria: un vincolo di simmetria è trattato come una parete senza attrito (senza la condizione di no-slip). Si può applicare solo in presenza di simmetria geometrica e idraulica dell’oggetto modellato;
- condizioni d’uscita: generalmente i valori dei parametri in uscita costituiscono il risultato ricercato tramite l’analisi; le condizioni di uscita devono essere tali da non falsificarlo.
Un set tipico di condizioni al contorno è costituito dalla distribuzione di pressione totale all’ingresso del dominio accoppiata con la portata in massa all’uscita.
I.1.2. Mediazione dei risultati e post-processing
In poche parole, il metodo degli elementi finiti applicato alla fluidodinamica consiste nell’applicazione, a ogni cella della griglia di calcolo, delle equazioni di bilancio di massa, quantità di moto ed energia. Ne consegue che l’analisi CFD produce un’enorme quantità di dati in uscita, i quali rischiano di risultare insignificanti per l’utente a meno che non vengano ridotti a un numero congruo di parametri e grafici.
Ogni software che realizza l’analisi CFD va accoppiato con un post-processor, che realizzi l’integrazione e la mediazione dei risultati ottenuti sulle sezioni del dominio. I software più evoluti contengono un post-processor al loro interno.
A seconda della grandezza interessata, per ottenere valori fisicamente rilevanti la mediazione può essere realizzata sull’area o sulla massa. In linea di principio la portata volumetrica e le velocità vanno mediate sull’area mentre il momento angolare e la potenza utile sulla massa; non essendo corretto realizzare una generalizzazione, si rimanda a [ 1 ] per una serie di esempi pratici.
Un’ulteriore caratteristica del post-processing è quella di esprimere i risultati dell’analisi in forma adimensionale, tramite coefficienti quali ad esempio:
(
)
2 2 , 1 , 2 2 u p p stat stat pρ
ψ
= − coefficiente di incremento di pressione statica( ) ( )
− = 2 1 1 2 2 2 2 u c u u c u u u thTali coefficienti sono utili ad esempio qualora si debbano confrontare macchine differenti, o nel caso si vogliano prevedere le prestazioni in seguito a una scalatura geometrica. Il loro impiego e i campi di applicazione non sono immediati da valutare, e dipendono anche dai risultati che si cercano di ottenere tramite l’analisi; si veda [ 1 ] della bibliografia per una serie di esempi di applicazione.
I.1.3. Incertezze, qualità e valutazione del CFD
L’analisi CFD è in grado di fornire risultati consistenti e accurati solo se vengono seguite precise regole per la generazione della mesh, l’elaborazione dei parametri di calcolo e il post-processing; tali regole dipendono dal particolare oggetto dell’analisi, e vanno ricercate sulla letteratura tecnica oppure sviluppate tramite comparazione dei risultati ottenuti con i risultati di prove pratiche.
La complessità dello strumento e la grande libertà di cui gode l’utilizzatore di un software CFD può dare luogo a errori anche significativi. Inoltre, tutto il procedimento contiene un gran numero di incertezze, dalla generazione del reticolo alla soluzione numerica delle equazioni del moto, al post-processing. Queste incertezze non sono generalmente note né quindi quantificabili.
Gli errori generati nell’analisi CFD possono derivare dalla modellazione dell’oggetto e dalle semplificazioni introdotte, le quali possono risultare eccessive. Si possono avere inoltre errori numerici e di arrotondamento, e infine errori dell’utilizzatore (quali negligenze o mancata comprensione dei fenomeni).
Per costruire un certo livello di confidenza nei confronti dei risultati dell’analisi CFD è necessario sviluppare una procedura volta a garantirne la qualità. Il fatto che gli errori numerici obbediscano a leggi statistiche, e quindi si possano sommare o compensare in maniere non prevedibile, può dare origine a risultati fortuiti.
La procedura aziendale di valutazione prevede sostanzialmente i seguenti passi: - verifica dei risultati numerici e valutazione qualitativa delle loro entità;
- validazione del modello fisico tramite confronto di risultati calcolati con misure pratiche; - ricerca ed eliminazioni di errori e negligenze;
- studio della sensibilità del calcolo agli effetti delle semplificazioni introdotte con il modello.
Il punto critico dell’analisi di qualità del calcolo CFD è la validazione dei risultati; essa può essere realizzata come segue:
- definizione del campo di validità dell’analisi: range dei numeri di Reynolds e dimensioni della macchina studiata;
- scelta e modellazione del dominio di calcolo; selezione del modello di turbolenza (il più usato nelle pompe è lo SST) e della wall function (determinante per lo studio delle perdite);
- determinazione delle dimensioni delle celle e della risoluzione della griglia;
- esecuzione del calcolo su un problema semplice e noto, per verificare i risultati numerici ottenuti con i dati sperimentali. In questo passaggio è necessario tenere conto anche delle incertezze sui valori misurati;
- esecuzione dell’analisi della macchina reale.
Uno strumento molto impiegato per lo studio degli errori numerici e della convergenza di una soluzione è la valutazione dei residui: essi sono dati dalla differenza tra la soluzione ottenuta e la soluzione esatta delle equazioni di bilancio (di massa, quantità di moto, etc.). Si tratta di quantità adimensionali, i cui valori accettabili sono generalmente dell’ordine di 10-4.
In ogni caso l’utente dovrà fronteggiare i problemi di convergenza della soluzione e del tempo di calcolo: essi determinano generalmente il limite superiore all’affinamento dell’analisi. I risultati dell’analisi fluidodinamica computazionale sono sempre affetti da incertezze, che possono andare dal 25-30% del valore “vero” per quanto riguarda le perdite per attrito (a causa delle difficoltà di modellazione del boundary layer, degli effetti della rugosità e della scelta del modello di turbolenza) al 0.5-1% per quanto riguarda prevalenza e rendimento idraulico.
I.2. Modelli e leggi del moto turbolento
I.2.1. Teoria del boundary layer e legge della parete
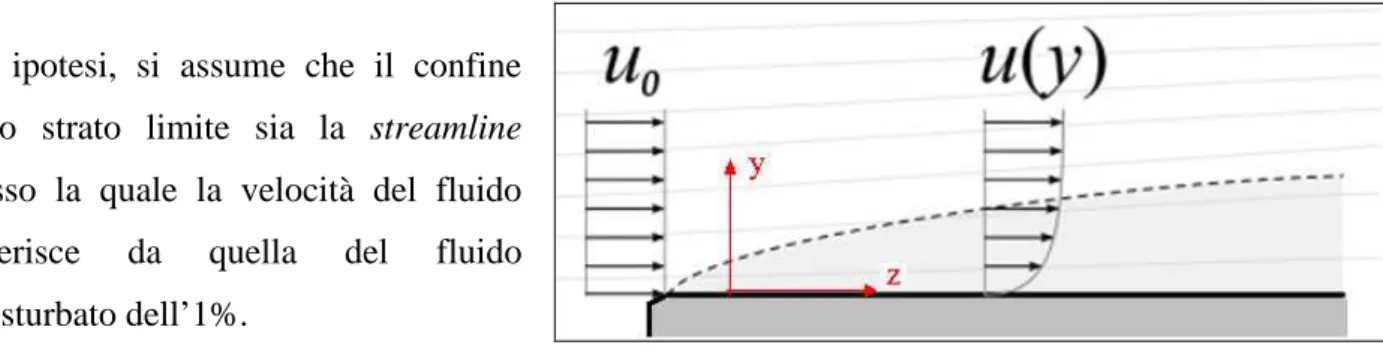
In fluidodinamica, il boundary layer (strato limite) è una zona ideale del flusso, localizzata generalmente nelle immediate vicinanze di una superficie solida, nella quale gli effetti causati dalla prossimità di tale superficie sono più evidenti rispetto alla zona esterna. La teoria dello strato limite è dovuta all’ingegnere tedesco Ludwig Prandtl.
Per ipotesi, si assume che il confine dello strato limite sia la streamline presso la quale la velocità del fluido differisce da quella del fluido indisturbato dell’1%.
Figura I.1 – Velocità nello strato limite
È possibile confinare gli effetti della viscosità all’interno dello strato limite; all’esterno invece il flusso si può considerare potenziale (irrotazionale, non viscoso, incomprimibile). In questo modo è possibile ottenere una soluzione approssimata per le equazioni di Navier-Stokes.
Al crescere del numero di Reynolds il flusso all’interno dello strato limite può essere laminare, di transizione o turbolento. Nel caso di strato limite turbolento è necessario scomporre la velocità del fluido in una componente media e una componente turbolenta; si ottengono in questo modo le equazioni di Navier-Stokes mediate (RANS, Reynolds-averaged Navier-Stokes equations).
Accennando a una soluzione estremamente semplificata del moto, rispetto al sistema di riferimento riportato nella figura I.1, si possono definire lo sforzo di taglio e le quantità adimensionali:
− ∂ ∂ ∂ ∂ = I y I x x u u y u y y
µ
ρ
τ
( ) Sforzo di taglio turbolentoρ
τ
Wu*= Velocità adimensionale caratteristica di frizione υ
y u
y+ = * Distanza adimensionale dalla parete
0
u u
u+ = Velocità adimensionale del fluido Le grandezze che compaiono in queste formule sono:
τ
w Pa Tensione di taglio alla pareteρ
kg/m3 Densità del fluidoυ
m2/s Viscosità dinamica del fluido y m Distanza dalla pareteu m/s Velocità locale nello strato limite uo m/s Velocità del flusso indisturbato
Dalla formula relativa allo sforzo di taglio si può notare che esso è costituito da due contributi: quello viscoso, e quello turbolento.
All’interno dello strato limite turbolento si verifica una forte differenza del comportamento della velocità, dovuto alla forte variazione degli sforzi di taglio, i quali tendono asintoticamente a zero in direzione del limite esterno dello strato limite. Tali sforzi sono rappresentabili con una relazione del tipo. Lo strato limite viene quindi suddiviso in tre regioni, studiate separatamente.
- Regione interna: in essa prevalgono gli sforzi viscosi; quelli turbolenti possono essere trascurati. Introducendo le variabili adimensionali si ottengono la seguente legge di moto e il relativo campo di validità:
+ + =u
y y+<5
- Buffer: gli sforzi turbolenti hanno circa lo stesso peso di quelli viscosi. La trattazione di questa zona è complessa in quanto zona di transizione. La legge di moto e il campo di validità sono:
+ + =− + y
u 3.05 5ln 5< y+ ≤30
- Regione esterna: in questa regione si ha la prevalenza degli sforzi turbolenti. La legge del moto e l’estensione del campo di validità sono:
+
+ = + y
u 5.5 2.5ln 30< y+<500
Le tre condizioni riportate costituiscono la cosiddetta “Legge della parete” (Law of the wall).
I.2.2. Modelli di turbolenza
I fenomeni turbolenti hanno la peculiarità di costituire dei sistemi dinamici non lineari e caotici, nei quali le grandezze fisiche coinvolte (campo di velocità, tensore di stress viscoso, temperatura, energia) si trovano in reciproca dipendenza.
La soluzione analitica delle equazioni di Navier-Stokes risulta generalmente impossibile. Anche la soluzione numerica delle equazioni del moto non è realizzabile se non nei casi più semplici: gli effetti turbolenti si estendono per un’ampia scala di lunghezze e di tempi e il costo computazionale per realizzare un’analisi completa non è sostenibile dai moderni calcolatori.
Il metodo risolutivo attualmente più diffuso è il cosiddetto RANS (Reynolds Averaged Navier-Stokes) che considera il campo di velocità effettivo come costituito da una componente media e una componente fluttuante (turbolenta). A questa ipotesi vengono aggiunti dei modelli costitutivi rappresentativi del particolare caso pratico.
L’impiego dei metodi RANS porta a ottenere nelle principali equazioni che regolano il flusso (bilancio di massa ed energia, tensore degli stress di taglio) la separazione tra effetti viscosi e turbolenti (si ricavano ad esempio una viscosità turbolenta e una diffusività termica turbolenta). Come già accennato, per giungere alla chiusura del problema è necessario elaborare degli opportuni modelli di turbolenza: essi hanno il compito di descrivere la distribuzione delle tensioni nel dominio fluido, e sono di natura empirica.
Molti dei modelli turbolenti sono basati sul concetto di viscosità turbolenta (eddy viscosity,
υ
t), che dipende esclusivamente dal comportamento del flusso (a differenza della viscosità “molecolare”, che è una proprietà del fluido).I modelli di turbolenza possono essere classificati tramite il numero di equazioni di trasporto impiegate. I modelli principalmente impiegati sono detti “modelli a due equazioni”, e sono:
- modello k –
ε
: oltre al bilancio di energia cinetica turbolenta specifica (k, [m2/s2]) si aggiungeil rateo di dissipazione di energia cinetica per unità di massa e di tempo,
ε
= – dk / dt. - modello k – ω: è analogo al modello k –ε
ma introduce la frequenzaω
dei grandi vortici.Questi modelli sono molto robusti e forniscono i risultati con ragionevole accuratezza; tuttavia tendono a perdere affidabilità se confrontati con strati limite di non-equilibrio. In particolare forniscono una predizione troppo tardiva del fenomeno della separazione della scia, oppure ne sottostimano l’ammontare, oppure non la individuano affatto.
Il modello k –
ε
è adeguato per prevedere il moto del fluido nelle zone centrali del flusso, mentre il modello k –ω
è più affidabile nei pressi di superfici solide. Per questo motivo è stato implementato il modello SST (Shear Stress Transport): esso impiega i due modelli descritti in precedenza all’interno dei loro range di maggiore affidabilità, e li raccorda con una funzione empirica di transizione. Inoltre, tale modello contiene una relazione più sofisticata per la viscosità turbolenta. Secondo [ 1 ] e [ 8 ] della bibliografia il modello SST è il più adeguato per la modellazione dei particolari con superfici ad elevata complessità, quali le pompe centrifughe, in quanto è in grado di prevedere correttamente le zone di separazione del flusso, e le loro entità.Per concludere va comunque sottolineato che non esiste un modello universalmente valido di turbolenza, che fornisca risultati ottimali per ogni applicazione: è invece necessario selezionare il modello più adatto alla situazione e ai risultati che ci si aspetta di ottenere dall’analisi.
Inoltre, le perdite all’interno di un flusso sono fortemente influenzate dalla rugosità relativa dei condotti: questi effetti non vengono colti correttamente dai modelli CFD, e la discrepanza dai risultati effettivi può essere rilevante.