Capitolo 4
Risultati e sviluppi futuri
In questo capitolo vengono descritte le prove effettuate per testare e valutare le prestazioni del sistema di acquisizione realizzato. Verrà inoltre presentata un’applicazione del sistema di acquisizione compiuta utilizzando un software per il riconoscimento di un set di posizioni standard della mano.
Una prima sessione di test è stata condotta sulla sezione analogica del sistema al fine di verificare il corretto funzionamento, individuare eventuali malfunzionamenti o difetti legati al processo di realizzazione del PCB e di assemblaggio della scheda. In questa fase di lavoro il controllo del multiplexer e l’acquisizione dei dati sono stati ottenuti utilizzando una scheda National Instruments gestita attraverso Simulik, lavorando necessariamente a frequenze ridotte rispetto al valore stabilito per la frequenza di campionamento.
In seguito all’integrazione del microcontrollore, è stato possibile verificare che le specifiche stabilite in fase di progetto risultassero adeguate per garantire il corretto funzionamento del front-end.
In particolare si intendeva verificare che l’intervallo di commutazione del multiplexer di 625µs (dovuto alla frequenza di campionamento scelta fc = 100Hz), consentisse alla tensione di uscita del sistema di raggiungere il valore di regime e quindi l’acquisizione del valore corretto della tensione.
La prova pertanto è stata effettuata inviando in ingresso al sistema delle tensioni di valore noto, generate alimentando con una corrente costante una serie di resistenze, e valutando che in acquisizione si ottenessero i valori attesi per le uscite.
utilizzata pari a 100Hz. In base a questa osservazione si è scelto di sviluppare il prototipo della scheda di acquisizione senza implementare alcun tipo di filtro antialiasing, provando in questo modo a ridurre il più possibile il numero di componenti che costituiscono il sistema. In fase di validazione del prototipo è stato ritenuto opportuno effettuare delle prove che potessero confermare tale scelta.
Il test effettuato prevedeva due acquisizioni dei segnali provenienti dal guanto a seguito del medesimo movimento eseguito: flessione di un dito ogni 2 secondi.
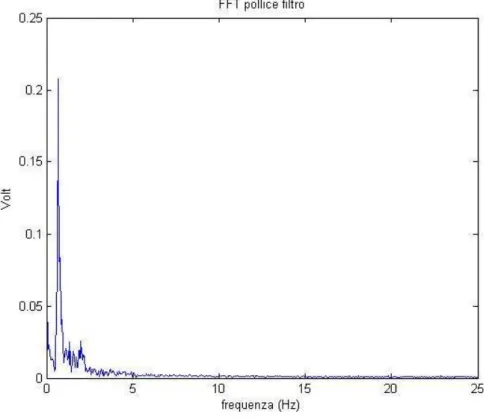
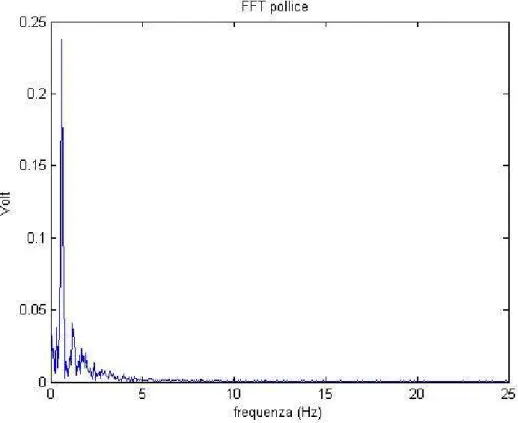
La prima rilevazione è stata compiuta con il sistema sviluppato, la seconda invece anteponendo agli ingressi del multiplexer dei filtri passa baso del I ordine con frequenza di taglio di 5Hz. Ovviamente, le condizioni di lavoro sono rimaste le medesime per entrambe le acquisizioni per cui la scheda è stata alimentata a 3,3V mentre il guanto è stato alimentato con una corrente di 3,4µA. I segnali acquisiti sono stati quindi convertiti tramite algoritmo FFT per effettuare un confronto sulle componenti frequenziali.
Fig. 4.3: FFT del segnale acquisito senza filtro antialiasing
Analizzando gli spettri dei segnali ottenuti sembra che l’introduzione del filtro antialiasing (Fig. 4.2) non comporti alcun vantaggio per quanto riguarda le componenti frequenziali del segnale acquisito. Effettivamente gli spettri dei due segnali risultano fortemente analoghi, eventuali differenze sono da imputare più a naturali variazioni dei movimenti compiuti per generare i segnali che ad effetti del filtro. Inoltre tenendo conto che il sistema sarà alimentato tramite una batteria non si dovrebbero avere problemi di disturbo a 50Hz legati alla linea di alimentazione domestica. Si può supporre pertanto che relativamente al fenomeno dell’aliasing un suo utilizzo possa effettivamente essere evitato.
Tuttavia l’introduzione di un filtro passa basso in ingresso ad ogni canale del multiplexer comporterebbe sicuramente una riduzione della rumorosità del segnale all’uscita del front-end analogico, con conseguente miglioramento della precisione in fase di acquisizione. Per tale motivo l’introduzione di un filtro risulta un’opzione da considerare per eventuali sviluppi dell’elettronica di acquisizione.
stato impiegato in diversi progetti di ricerca o di collaborazione del Centro Piaggio con altri istituti internazionali quali ad esempio l’Harvard Medical School di Boston [20, 21].
Nello svolgimento della prova si è cercato di utilizzare i due sistemi nelle medesime condizioni di lavoro. Quindi a parte la inevitabile differenza di alimentazione, ± 15V per la scheda e 3,3V per il prototipo, le acquisizioni sono state compiute utilizzando il medesimo guanto (240KΩ) alimentato da una corrente costante di circa 4µA per entrambi i sistemi.
Volendo comparare le prestazioni delle due elettroniche, i segnali sono stati acquisiti direttamente dalle uscite dei due sistemi senza effettuare alcuna operazione di elaborazione digitale. Il test è stato sviluppato su cinque misure relative a cinque differenti posizioni della mano e tre posizioni statiche:
• Guanto non indossato • Mano aperta
• Mano chiusa
e due in movimento:
• Flesso-estensione del pollice con frequenza di circa 0,5Hz • Flesso-estensione dell’anulare con frequenza di circa 0,5Hz
I movimenti sono stati utilizzati per un confronto delle risposte dei due sistemi allo stesso tipo di sollecitazione. Le tre posizioni statiche invece sono state utilizzate per poter ricavare un’indicazione qualitativa del tipo di rumore presentato dai segnali ed effettuare una valutazione della varianza ad esso relativa.
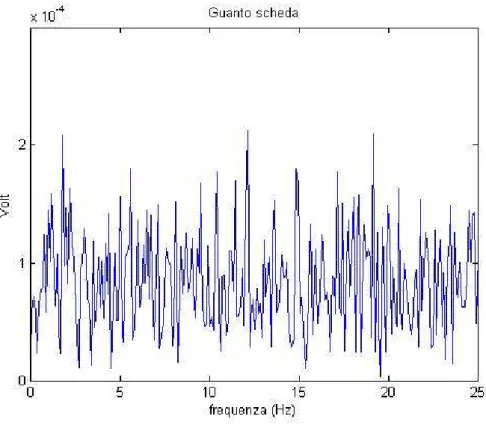
Per poter evidenziare le componenti armoniche del rumore, i segnali sono stati normalizzati rispetto al loro valore medio (in modo da eliminare la componente in banda base) e quindi trasformati tramite algoritmo FFT. Come si può evincere dalle Fig. 4.4 e 4.5, entrambi i sistemi presentano in uscita un rumore di tipo bianco.
L’origine di tale disturbo potrebbe trovare una spiegazione oltre che in sorgenti di rumore termico anche nella natura dell’elastomero conduttivo. Il sensore infatti, ottenuto iniettando particelle conduttive in un substrato isolante, potrebbe risultare una sorgente di rumore granulare, anch’esso rumore bianco.
Per ottenere una stima dell’entità dei disturbi riscontrati è stata quindi calcolata la varianza dei segnali acquisiti.
Sensori dito medio scheda
GUANTO 8,70E-07 1,54E-06 1,13E-06 1,32E-06 MANO APERTA 2,64E-06 1,05E-05 3,35E-06 1,62E-06 MANO CHIUSA 6,75E-06 7,18E-05 1,01E-05 3,47E-06
Tab. 4.1: varianza dei segnali relativa ai sensori del dito medio acquisiti con la scheda di prima generazione, valutate per le tre posizioni statiche della mano
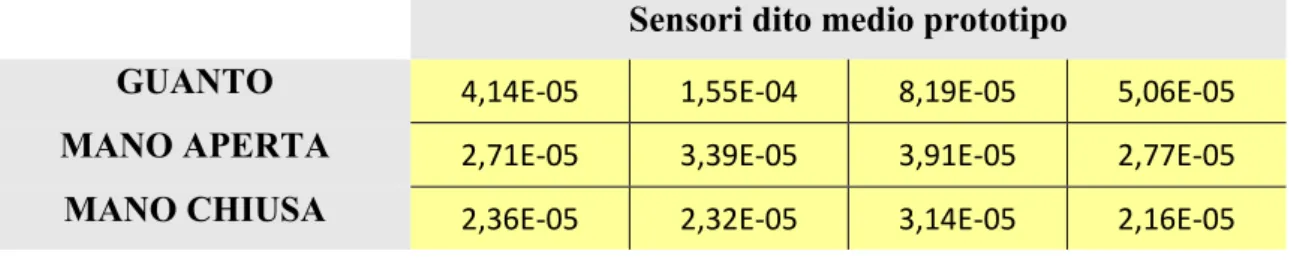
Sensori dito medio prototipo
GUANTO 4,14E-05 1,55E-04 8,19E-05 5,06E-05
MANO APERTA 2,71E-05 3,39E-05 3,91E-05 2,77E-05 MANO CHIUSA 2,36E-05 2,32E-05 3,14E-05 2,16E-05
Tab. 4.2: varianza dei segnali relativa ai sensori del dito anulare acquisiti con il prototipo, valutate per le tre posizioni statiche della mano.
È stato riscontrato (Tab. 4.1) come i segnali misurati tramite il prototipo sviluppato abbiano varianza mediamente di un ordine di grandezza superiore rispetto a quella dei segnali relativi all’altro sistema.
Una maggiore rumorosità del sistema realizzato può essere spiegata tenendo conto che nel prototipo è stato introdotto un termine di guadagno che inevitabilmente agirà anche sul rumore in ingresso al circuito. Viceversa ogni canale dell’elettronica attualmente utilizzata prevede un filtro passa basso sull’uscita dell’amplificatore da strumentazione riducendo così il rumore sul segnale di uscita.
Inoltre non è da sottovalutare il fatto che il prototipo non sia stato realizzato con un processo di tipo industriale il che contribuisce sicuramente ad incrementare la rumorosità complessiva del sistema.
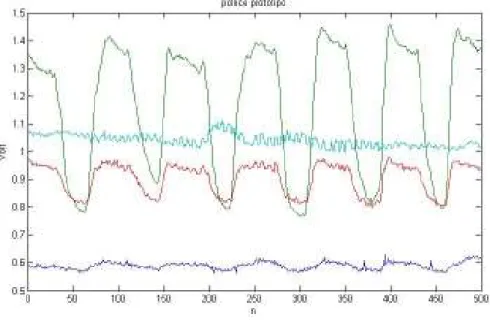
Nelle Fig. 4.6 e 4.7 sono riportati i segnali ottenuti dal movimento del pollice acquisiti rispettivamente con il prototipo e con la scheda di acquisizione attualmente utilizzata. I segnali riportati sono relativi ai quattro sensori che monitorizzano l’attività del pollice. Risultano evidenti i picchi di tensione corrispondenti al movimento di flessione del dito.
Ad eccezione delle differenze legate al movimento compiuto nelle due acquisizioni, i segnali, mostrano un andamento del tutto simile.
Questa ultima verifica ci offre una conferma della capacità del sistema realizzato di seguire ed acquisire correttamente i segnali provenienti dal guanto sensorizzato.
Un’ultima analisi è stata effettuata relativamente alla potenza assorbita dai due sistemi. In letteratura per il sistema attualmente usato è indicato un consumo di potenza di alcuni watt per un’alimentazioni di ± 15 V.
La potenza assorbita dal prototipo è stata valutata alimentando il prototipo con 3,3Volt. Una prima misura è stata effettuata analizzando una configurazione del sistema priva del modulo di trasmissione Bluethoot. La corrente assorbita è risultata di circa 29mA che porta ad una potenza assorbita di circa 96mW.
Tale valore praticamente si raddoppia collegando il modulo di trasmissione, in tale caso la corrente assorbita è risultata di 56mA per una potenza di 198mW.
4.1 Applicazione del sistema: riconoscimento di un set discreto di posture
Per completare i test di valutazione delle prestazioni del prototipo realizzato, esso è stato integrato in un’applicazione sviluppata dal Centro Piaggio per il riconoscimento di un set discreto di sette posizioni della mano.
Alla base del procedimento implementato c’è la considerazione per cui, grazie all’elevato numero dei sensori del guanto, ogni posizione della mano risulta univocamente definita dal conseguente stato dei sensori, ovvero dai valori assunti dalle resistenze elettriche.
L’algoritmo sviluppato (Fig. 4.8b) prevede quindi una prima fase di calibrazione del sistema in cui viene memorizzato lo stato dei sensori associato ad ogni posizione che si intende riconoscere.
Fig. 4.8: Riconoscimento di un set discreto di posizioni della mano: a) interfaccia software per il riconoscimento della gestualità della mano; b) Schema a blocchi dell’algoritmo impiegato.
Il set dei dati di calibrazione ottenuti è utilizzato per il riconoscimento della posizione tramite un classificatore che minimizza la differenza con lo stato assunto dai sensori. Il prototipo del sistema di acquisizione è stato testato su quattro prese, i risultati ottenuti sono stati molto incoraggianti e in linea con quelli presenti in letteratura per tale applicazione [20]. Il sistema, dopo l’opportuna fase di calibrazione, è riuscito a riconoscere le posizioni senza errori rilevanti.
Il test effettuato quindi offre non solo la conferma delle buone prestazioni del prototipo, riscontrate effettuando il confronto con il sistema di acquisizione di prima generazione, ma mostra inoltre un’ottima possibilità di integrazione con le applicazioni per il guanto sensorizzato attualmente sviluppate.
4.2 Sviluppi futuri
Dalle prove effettuate il prototipo sviluppato ha mostrato delle prestazioni del tutto comparabili con quelle dell’elettronica attualmente utilizzata per l’acquisizione di dati dal guanto sensorizzato. L’unico problema evidenziato risulta essere una maggiore rumorosità dei segnali ottenuti, che potrà sicuramente essere ridotta applicando opportuni filtri e con la realizzazione di un PCB di tipo industriale. Tuttavia questo sembra non inficiare la capacità della scheda di garantire la corretta interazione tra guanto sensorizzato e le applicazioni attualmente sviluppate. Inoltre i bassi consumi di potenza ed i vantaggi che l’adozione di un’elettronica portatile comporterebbe, costituiscono due validi motivi per portare avanti lo sviluppo di questo prototipo.
Pertanto gli sviluppi futuri per il sistema realizzato sono sostanzialmente volti all’ottimizzazione dell’attuale elettronica in funzione di sviluppare una scheda SMD dalle dimensioni molto ridotte.
È possibile considerare quindi tra le attività da svolgere in futuro:
• Ulteriori analisi sul front end analogico per ridurre la rumorosità sul segnale in uscita, valutare quindi la necessità di introdurre un filtraggio sui segnali di ingresso.
• sostituire il modulo di trasmissione Bluethoot usato per lo sviluppo del prototipo con un trasmettitore che garantisca buone prestazioni e minore consumo di potenza (ad esempio un modulo basato su protocollo ZigBee).