Capitolo II
ALGORITMI DI
RICOSTRUZIONE
2.1-Introduzione
Si è visto che sovrapponendo le varie bobine di un phased array ed utilizzando un preamplificatore a bassa impedenza si riesce a disaccoppiare le bobine facendo, così, in modo che ciascuna unità riceva indipendentemente il segnale dai segmenti del campione di loro pertinenza, esaminato con un ritardo temporale prestabilito. Ciascuna bobina che compone l’array, quindi, genera simultaneamente un’immagine relativa alla zona del campione in esame. Nella Fig. 2.1 sono mostrate due immagini anatomiche dello stesso oggetto ottenute con due bobine separate.
Fig.2.1- Immagini di fantoccio ottenute con due bobine separate (bobina 1 e
bobina 2)
L’immagine finale è ottenuta andando a sommare pixel per pixel le immagini singole di ogni bobina, ognuna di queste “pesata” in modo opportuno. Il raggiungimento di questo risultato ha, però, introdotto il problema di come calcolare questi “pesi”: di norma l’immagine finale ottima è quella con rapporto segnale rumore maggiore e quindi da qui si è partiti.
Per rapporto segnale rumore (SNR) si intende il rapporto tra la potenza di segnale e quella di rumore; se un pixel ricostruito è dato da :
dove α è un fattore di scala, S è il valore reale del pixel ed e è il rumore a media nulla e varianza σ2, allora si ha:
SNR=
α
S
2 /σ
2 (2)Una prima diversificazione di approccio si ha nell’usare la mappa del campo RF, come nei metodi:
-Maximized SNR image (complex data, magnitude data) -Uniform sensitivity image
-Uniform noise image
oppure non utilizzare tale mappa del campo, ma una stima di questo come nel metodo:
-Sum of Squares image,(SoS).[Roemer et al.].
Tale diversificazione è sorta principalmente a causa del problema del calcolo della mappa del campo RF; infatti tale mappa si può calcolare direttamente tramite Biot-Savart, ma ciò richiede una precisa conoscenza a-priori della posizione di ogni bobina in relazione al FOV. Questo è particolarmente problematico per phased-array flessibili. Inoltre, le mappe RF dipendono dall’effetto del carico. Oppure la mappa rf si può stimare a-priori usando un fantoccio di
riferimento, tecnica questa utilizzabile solo con array rigidi e soggetta, anche in questo caso, ad errori dovuti agli effetti del carico. Anche una stima in vivo, acquisendo una o più immagini scout, inevitabilmente comporta dispendi di tempo ed è molto sensibile alle disomogeneità di campo. Infine la mappa rf si può ottenere facendo una valutazione mediante la combinazione di immagini con array e body coil, ma anche questo approccio è dispendioso in termini di tempo e molto sensibile al movimento del soggetto.
Per tutti questi motivi il metodo SOS si è rivelato il sistema più utilizzato e che più si avvicina al risultato ottimo, proprio per questo altre metodologie seguenti non sono altro che miglioramenti od approfondimenti di tale tecnica, presa, comunque, sempre come punto di partenza, come si nota nel lavoro di Bydder et al. o nella ricostruzione adattiva di Walsh et al..
2.2-Calcolo del campo elettromagnetico
Vediamo di calcolare, con l’ausilio di simulazioni elettromagnetiche, l’andamento del pattern di campo magnetico generato dall’array in funzione delle dimensioni delle spire e della distanza tra esse.
Lo studio del campo magnetico generato da una corrente che scorre in una spira chiusa si fonda sull’utilizzo dell’ equazione di Biot-Savart:
∫
=
CR
R
dL
I
r
B
0^
34
)
(
π
µ
(3)dove l’integrale è esteso all’intero circuito chiuso, µ0 è la permeabilità magnetica del vuoto ( 4 *10 7H /m
0 = π −
µ ), I è la corrente
in Ampere e gli altri termini sono descritti in Fig. 2.2:
dL R
dB
I
L’equazione di Biot-Savart può essere interpretata matematicamente come affermazione che nel punto P il campo magnetico risultante B
prodotto dalla corrente è la somma di un grande numero di piccolissimi contributi elementari dB dovuti ad ognuno dei segmenti o elementi di lunghezza dL componenti il circuito.
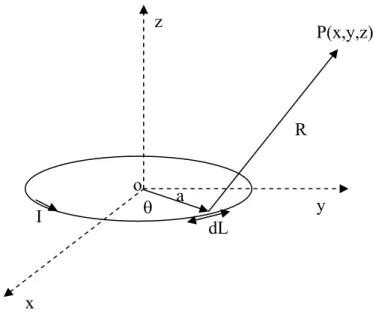
Si consideri una spira circolare di raggio a giacente sul piano (x,y) con il centro coincidente con l’origine degli assi cartesiani, come visibile in Fig. 2.3:
Fig. 2.3-Spira circolare
Vediamo di calcolare il campo magnetico generato da una corrente che scorre nella spira in un punto P generico di coordinate x,y,z. I punti giacenti sulla spira hanno coordinate:
y z R P(x,y,z) I o dL θ a x
θ
sen
'
a
x
=
(4)θ
cos ' a y = (5) 0 '= z (6) per cui le componenti del segmentino dL sono:θ
θ
θ
d
a
dz
dy
dx
dL
≡
(
,
,
)
≡
(
−
sen
,
cos
,
0
)
(7) Il vettore R ha per componenti la differenza tra le coordinate delpunto P e quelle del generico punto giacente sulla spira, cioè:
) , sen , cos ( ) ' ,' ,' ( ) , , (Rx Ry Rz x x y y z z x a y a z R ≡ ≡ − − − ≡ −
θ
−θ
(8)Applicando la regola del prodotto vettoriale per calcolare il
numeratore dell’equazione di Biot-Savart, si può scrivere
l’espressione delle tre componenti del campo magnetico nel punto P(x,y,z):
∫
+ − + − = π θ θ θ θ π µ 2 0 2 3 2 2 2 0 ] ) sen ( ) cos [( d cos z 4 z a y a x a I Bx (9)∫
+ − + − = πθ
θ
θ
θ
π
µ
2 0 2 3 2 2 2 0 ] ) sen ( ) cos [( d sen z 4 z a y a x a I By (10)∫
+ − + − − = π θ θ θ θ θ π µ 2 0 2 3 2 2 2 2 0 ] ) sen ( ) cos [( )d cos x sen -( 4 z a y a x a y a a I Bz (11)L’estensione al caso di due spire circolari che compongono una bobina phased-array può essere schematizzata dalla fig. 2.4:
Fig. 2.4-Array di due spire circolari
Il campo magnetico totale generato dalle due spire può essere calcolato sommando le componenti omologhe dei campi generati dalle singole spire.
E’ stato sviluppato un programma di simulazione che permette di ottenere l’andamento del campo magnetico della spira in funzione
x y z
P(x,y,z)
1 I I2 1 dL dL2 1 R 2 R ( ) ( ) ( ) (x yz) tot z y x z y x z y x dB B dB dB dB , , , , 2 , , 1 , ,∫
= + =delle coordinate x ed y, per una coordinata z fissata. Esso ha come dati di ingresso il raggio delle spire, il valore della corrente in Ampere e la coordinata z alla quale si vuole ricavare l’andamento del campo magnetico ed i risultati che fornisce sono delle curve di livello del modulo del campo e dei grafici 3D che mostrano l’andamento dello stesso. Il centro della bobina giace nel punto di coordinate x=1,5a ed y=1,5a, dove a è il raggio delle spire.
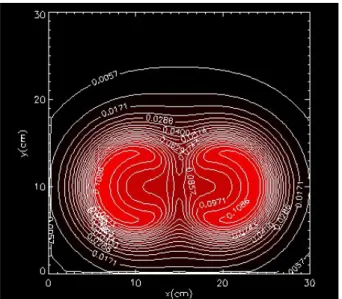
Un esempio dei risultati ottenibili con questo programma è mostrato nelle Fig. 2.5, 2.6 e 2.7.
Fig. 2.5-Curve di livello del campo magnetico alla coordinata z=2cm per un
Fig. 2.6-Andamento del campo magnetico alla coordinata z=2cm per un
phased- array di due spire circolari di raggio a=5cm, distanti
d=10cm ed I=1A
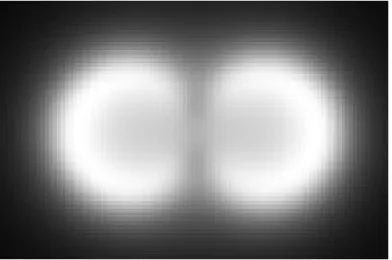
Fig. 2.7-Andamento del campo magnetico su 256 livelli di grigio alla
coordinata z=2cm per un phased- array di due spire circolari di
2.3-Massimizzazione del SNR
Una generica antenna phased-array si può immaginare come nella figura sottostante (Fig.2.8) [Roemer et al.]:
Fig.2.8-Phased array composta da n bobine.
La tensione totale in uscita è ottenuta shiftando in fase e sommando la tensione di ogni bobina:
Vtot= ωMV
∑
=n i 1
ni Bti cos(ω t+φi +ψ-θi) (12)
dove V è il volume del voxel, M è la densità di magnetizzazione, Bti è
Il rapporto segnale-rumore, considerando come rumore solo le fluttuazioni termiche, sarà:
SNR= fRtot kT Vtot ∆ 4 (13) con Rtot la resistenza di rumore totale vista ai terminali di uscita. Tale
matrice tiene conto di tutti i rumori correlati ed incorrelati tra le n bobine.
Per determinare il guadagno e i relativi shift di fase che massimizzano il SNR se ne calcola la derivata seconda rispetto agli sfasamenti Introducendo una notazione matriciale per semplificare la visione dei risultati, si ottiene: b=
λ
α
R
conλ
=
α
tb
*/SNR2 (14) con b ed α vettori colonna rispettivamente di bi=Bti ejθi α=ni ejφi ed Rla matrice quadrata delle resistenze mutue di rumore. Da qui si ottiene il vettore colonna complesso dei pesi ottimi e degli shift di fase:
b
R
−1=
λ
α
(15) Praticamente i dati acquisiti dalle bobine sono combinati utilizzando tali pesi e sfasamenti che dipendono dalla posizione. Utilizzando idi rumore le immagini singole possono essere shiftate in fase e sommate.
Se pi è il valore complesso del pixel nel punto (x,y,x) dovuto alla
bobina dopo l’applicazione della trasformata di Fourier, la combinazione ottima delle immagini fornisce il valore P per il singolo pixel nel punto (x,y,z):
b R p
P =
λ
T − 1(16) dove p è il vettore colonna complesso dei pi e λ si può considerare un
fattore di scala.
Partendo da qui si possono anche ottenere immagini a Sensibilità uniforme ed a Rumore uniforme: nelle prime viene scelto il fattore di scala (Eq.16) in modo che l’ampiezza di P sia indipendente dalle ampiezze e dalle direzioni dei campi RF delle bobine; nelle seconde tale parametro fa ottenere un’immagine utile per visualizzare le variazioni di SNR. E’ l’equivalente phased array di una immagine ottenuta con una surface coil senza l’applicazione di correzioni di intensità, λ viene scelta (in Eq.16) in modo che R sia indipendente dalla posizione.
Sia l’immagine a rumore uniforme che quella a sensibilità uniforme non sono di elevata qualità, la prima a causa del range dinamico
ridotto dell’occhio umano, la seconda perché può enfatizzare il rumore in regioni che non sono di interesse, allora vengono unite secondo un approccio ibrido che permette di produrre automaticamente sensibilità uniforme in regioni con alto SNR e rumore uniforme in zone con basso segnale rumore.
Il metodo di massimizzazione del SNR, benché, come dice il nome stesso, dia il rapporto segnale-rumore massimo, si è rivelato anche il più complicato da applicare perché richiede la conoscenza dettagliata della mappa di campo RF e, come precedentemente accennato, questa richiesta si rivela possibile solo a livello teorico, come visto nel simulatore di campo, ma in pratica impossibile per phased array flessibili ed influenzabili dall’effetto del carico anatomico, come nella realtà di uno scanner di Risonanza Magnetica.
2.4-Sum
of squares
E’ la metodica che permette la ricostruzione dell’immagine a prescindere dalla conoscenza delle mappe di sensibilità delle bobine a radiofrequenza. Si basa sul presupposto che, poiché il segnale NMR è proporzionale al campo RF locale, le immagini sono loro stesse una stima delle intensità e delle direzioni dei campi magnetici. Più alto è il
SNR e migliore sarà la stima. [Roemer et al.]
.
Partendo dai segnali delle singole bobine la combinazione a cui si giunge con la metodica SoS è espressa dall’equazione:
∗ −
= p R p
P T 1
(17) dove P(x,y,z) è il segnale del pixel considerato dato da tutto l’array, cioè: 1 2 p =
.
.
np
p
p
con pi valore complesso del pixel in (x,y,z) dovuto alla i-esima bobina, R è la matrice delle resistenze di rumore, pT è la matrice trasposta di p e p* è il vettore colonna con i complessi coniugati dei pi.
Sotto le ipotesi che:
- la matrice R sia diagonale (Rij=0 ∀ i≠j), che corrisponde ad avere le bobine perfettamente disaccoppiate fra loro;
- la matrice R abbia tutti gli elementi della diagonale uguali fra loro (Rii=Rjj=R ∀ i,j), ossia tutte le bobine presentano lo stesso rumore. In tali condizioni l’espressione (17) diviene:
(
)
* * * 1 2 1 2 n np
1/ R
0
p
P=
p
p
. . p
0
0
.
=
.
0 1/ R
p
0
0
O
(
)
* * * 1 2 1 2 n np
p
=
p /R
p /R
. .
p /R
.
=
.
p
n n * * i=1 i=1 i i i i
1
1
p p
p p
R
R
=
∑
=
∑
=
n 2 i=1 i1
p
R
=
∑
(18)Quindi con un array di bobine perfettamente disaccoppiato ed equalizzando i rumori dei diversi segnali, è possibile applicare il metodo SoS effettuando un calcolo solo sui moduli ossia sulle intensità dei pixel delle singole immagini.
Vediamo di ricavare, adesso, l’espressione da impiegarsi nella pratica per il calcolo della stima del segnale secondo l’algoritmo SoS.
Ogni pixel dell’immagine è caratterizzato da un’intensità di segnale Si
proveniente dalla bobina i-esima tra le n di cui è composto l’array:
i i
i b e
S = ρ + (19)
dove ρ è il segnale NMR, b è la sensibilità della bobina i-esima e i e i
è il rumore in uscita dalla bobina i-esima.
Assumendo una correlazione nulla tra le bobine, la stima ottima (P ) opt
∑
∑
= i i i j j opt S b b P 1 2 * (20) con j=1….n.Dato che la conoscenza sperimentale dei b è molto difficile da i
ottenere, è possibile ricavarne una stima impiegando la:
∑
= k k i i S S b 2 1 (21) con k=1….n.Sostituendo la (10) nella (9), si ottiene la stima del segnale secondo la tecnica SoS (Sum-of-Squares):
∑
=
k k SoSS
P
2 (22)Riassumendo, quindi, la combinazione delle immagini secondo la tecnica SoS viene effettuata effettuando la radice quadrata della somma dei quadrati delle intensità di ciascun pixel delle immagini di partenza.
2.5-SOS equalizzata
L’applicazione della metodologia SoS alle immagini iniziali, come descritta nel paragrafo precedente, può risultare non ottimizzata quando le due immagini sono affette da rumore in quantità diversa, cioè quando le deviazioni standard del rumore che, inevitabilmente, si sovrappone alle immagini, sono diverse. Questo può essere dovuto sia alla presenza di rumore non perfettamente identico nelle bobine sia all’aggiunta di rumore nelle fasi di condizionamento del segnale sui vari canali di ricezione. In questo lavoro di tesi si è studiato un metodo per equalizzare il rumore di fondo nelle immagini singole prima di applicare la SoS.
Innanzitutto si calcolano le deviazioni standard di rumore sulle due immagini, andando a misurarne i valori in quattro zone dette ROI (Region Of Interest) in zona con assenza di segnale (dove, quindi, è presente solo il rumore) e facendone la media aritmetica, ricavando un valore di deviazione standard di rumore per ogni immagine.
Il processo di equalizzazione viene effettuato andando a “pesare” i pixel dell’immagine più rumorosa (cioè con il valore più elevato di
deviazione standard) con il rapporto tra le deviazioni standard minima e massima.
Indicando, quindi, con Smin le intensità di segnale dei pixel dell’immagine con deviazione standard minore (σmin , nel caso in esame
σ
1 ) e con Smax le intensità dei pixel dell’immagine con deviazione standard maggiore (σmax, nel nostro casoσ
2), il segnale ricostruito viene ricavato con la formula:(
)
max 2 max min 2 min*
+
=
S
S
S
equalσ
σ
(23)E’ possibile estendere al caso generico di un phased-array composto da N bobine la suddetta formula, che diventa:
(
)
1 2 1 min 2 2 2 min 2 1 1 min 2 min * * ... * + + + = − − N N equal S S S S S σ σ σ σ σ σ (24)che, in pratica, significa: pesare ciascuna immagine per il rapporto tra la deviazione standard minima e quella relativa all'immagine considerata.
2.4 Stima del campo
Alternativamente alla metodica SoS, conoscendo la mappa dei campi RF delle bobine (i b ) ed applicando l’equazione (5), si ottiene la i
combinazione ottima per le immagini MR, quella che fornisce il più alto valore di rapporto segnale-rumore (SNR) sull’immagine ricostruita. Il problema è che, spesso, la conoscenza di tale mappe non è nota a priori e per la stessa bobina può variare a seconda dell’entità del carico, cioè dell’organo biologico al quale la bobina è dedicata.
In questo lavoro di tesi si sono sviluppati e testati due metodi per ricavare la mappa dei campi a radiofrequenza direttamente dalle immagini MR.
Il primo metodo impiega una finestra di “smoothing” da applicare sulle immagini ricavate dalle due bobine. [Bydder et al.]
L’equazione di partenza è ancora la (16), che per comodità riportiamo:
i i i
b
e
L’idea di base è che, essendo i b (mappe di sensibilità delle bobine) i
variabili “lentamente” sull’immagine, all’aumentare della larghezza della finestra di smoothing, S tende a i b . i
E’ stato applicato lo smoothing spaziale descritto dal seguente algoritmo (A è la matrice):
=
=
∑
− = − + 1 0 2 /i
w/2,....,
N
-
w
1
altrimenti
w j w j i i i
A
w
A
S
(26)
impiegando una finestra di larghezza abbastanza ampia, le immagini “smoothate”, per le considerazioni già fatte per cui Si → , sono loro bi
stesse le stime delle mappe di sensibilità delle bobine RF (b1 e b2). Le immagini che si ottengono sono un’ottima stima delle mappe di sensibilità delle bobine ma rivelano sempre anche la presenza di evidenti artefatti “a stella” nelle zone a transizione veloce; per ovviare a questo inconveniente si è, quindi, pensato di utilizzare una finestra di Hanning sulle immagini iniziali, descritta dalla formula:
1
...,
1,
,
0
),
/
2
cos(
*
)
1
(
)
(
k
=
−
−
k
N
k
=
N
−
w
α
α
π
(27)dove α vale 0.5 per la finestra di Hanning.
Tenendo ancora presente l’espressione (25), applichiamo la formula descritta nell’articolo di Roemer che fornisce la stima ottimale per
ρ
:∑
=
i i i i optb
S
P
ω
(28) dove i pesi ωi sono dati da:∑
=
j j i ib
b
2 2ω
(29) quindi, sostituendo:∑
∑
= i i i j j opt S b b P 1 2 * (30)L’espressione finale che permette di calcolare la stima ottima, secondo questo algoritmo denominato SUPER, è descritta nella (31):
opt k
k SUPER
b
P
P
=
∑
2 (31)Nel caso che stiamo esaminando, riferito ad un array costituito da due bobine, sostituendo la (27) nella (28), dopo alcuni passaggi si ottiene:
2 2 2 1 2 2 1 1
b
b
b
S
b
S
S
SUPER+
+
=
(32)dove gli S sono le due immagini iniziali ed i i b sono le mappe di i
sensibilità delle bobine (immagini dopo il filtraggio Hanning).
Il caso dell’applicazione dell’algoritmo SUPER sulle immagini equalizzate fornisce: 2 2 2 1 2 2 1 1 b b b S r b S SSUPER + + = (33)
dove r è il rapporto di equalizzazione. Come nel caso della SoS
equalizzata, in pratica, l’immagine più rumorosa viene moltiplicata per un peso dato dal rapporto di equalizzazione r.
Nel confrontare le immagini SoS e Super occorre, comunque, tener presente che la differenza δ tende ad aumentare sia al diminuire del
SNR che all’aumentare del numero delle bobine (N ) che compongono
2
1
SNR
N
−
=
δ
(34)se ne deduce che l’algoritmo Super è tanto più efficiente rispetto a quello SoS tanto più il phased-array è costituito da un maggior numero di bobine.
Per meglio evidenziare quanto detto finora, partendo da quattro immagini di un fantoccio ottenute con un array spinale a basso SNR (Fig.2.9):
otteniamo con i diversi algoritmi (Fig.2.10):
Fig.2.10-Immagini ottenute con SOS convenzionale (b), con Super (c) e con
2.5-Altri algoritmi
La ricostruzione dei dati ottenuti da n bobine viene tipicamente
effettuata utilizzando un metodo standard con il quale,
preliminarmente, ogni singola immagine di ampiezza viene ricostruita utilizzando i dati di ogni singola bobina. Queste n immagini “intermedie” sono poi combinate per formare l’immagine composta, utilizzando il metodo SoS. Tuttavia tale metodo richiede una larghezza di banda n volte più grande di quella di ogni singola bobina e l’impiego di n ricevitori separati, di n applicazioni della Trasformata di Fourier e quindi di conseguenza comporta la nascita di limitazioni temporali e l’esigenza di elevate profondità di memoria.
Questi problemi vengono ovviati con un “allineamento di fase” mediante l’impiego di un singolo ricevitore, con un utilizzo di banda pari a quello di una bobina singola.
La tecnica di allineamento di fase [Debbins et al.] prevede l’acquisizione del segnale “grezzo” da ogni bobina ed effettua la somma prima della ricostruzione delle immagini. Si definisce una fase per ciascun voxel per ogni bobina i-esima attiva:
θnet,i= ψ+θg,,i+θe,i+θr.i (35)
dove ψ è la fase totale isocromatica dipendente dalla temporizzazione degli impulsi, dal campo magnetico e dalla codifica ed i pedici g, e, r stanno per, rispettivamente, geometria e posizione della bobina, configurazione elettrica della bobina e sfasamenti di fase.
Una volta ottenuto il termine coniugato della relazione di fase (-θnet,i),
questo viene applicato ai segnali grezzi generati da ciascuna bobina. Tale applicazione prevede due approcci: uno hardware ed uno software. Il primo consiste nell’effettuare un allineamento di fase utilizzando un circuito sfasatore analogico posizionato sulle terminazioni dei cavi coassiali che provengono da ciascuna bobina. Il secondo metodo prevede la misura di θnet,i direttamente sull’immagine
e la creazione del suo coniugato per ottenere l’immagine finale dopo una somma dei segnali shiftati in fase. L’implementazione hw permette l’utilizzo di un singolo ricevitore e quindi riduce significativamente la larghezza di banda del segnale, mentre l’approccio sw permette all’utente un intervento personale. Entrambi i metodi forniscono lo stesso valore di SNR, inferiore comunque al metodo SoS.
Un’altra tecnica di ricostruzione [Walsh et al.] si basa su una formulazione stocastica del filtro di matching, nella quale sia il segnale NMR che il rumore sono rappresentati in termini di matrici di correlazione. La formulazione del filtro differisce da quella classica (Roemer) nel fatto di considerare il segnale ed il rumore come processi stocastici piuttosto che deterministici.
Indicando con s(t) il processo stocastico del segnale e con n(t) quello del rumore, con il pedice j le componenti misurate dal j-esimo sensore, le matrici di correlazione per i processi di segnale e di rumore sono date da:
Rs(j,k)=E[sj(t)sk(t)*] (36)
Rn(j,k)=E[nj(t)nk(t)*] (37)
con j e k che vanno da 1 ad N.
Il vettore del filtro che massimizza il SNR è costituito dall’ autovettore del seguente prodotto matriciale:
Nella nostra applicazione i sensori sono i phased-array, quindi le aspettazioni calcolate nell’equazione precedente sono valutate nello spazio anziché nel tempo.
Sebbene il segnale NMR non sia un processo stocastico, questo modello può essere vantaggioso per il fatto che il filtro di matching stocastico, valutato in un singolo punto nello spazio, converge al filtro deterministico e quindi permette una stima della mappa del campo RF. Ragionando direttamente sull’immagine MR, considerando un singolo pixel ed assumendo il rumore come bianco, il filtro stocastico converge al metodo SoS.
L’applicazione del filtro stocastico riduce il rumore nelle zone scure dell’immagine e gli artefatti da movimento, ottimizzando la stima della correlazione tra i processi.
In particolare, il valore efficace del livello di rumore nelle zone scure dell’immagine è ridotto di un fattore N rispetto al metodo SoS, dove
N è il numero delle bobine che costituiscono l’array.
Come si può vedere dall’immagine di angiografia MR (Fig.2.20) con tale metodo si riescono ad eliminare gli artefatti dati dal flusso di sangue aortico: nell’immagine a sinistra (SoS) i vasi sulla destra del
cuore sono oscurati dagli artefatti da flusso cardiaco, mentre in quella di destra (filtro adattativo) gli artefatti sono soppressi.
Fig. 2.20-Soppressione degli artefatti
Con tale algoritmo si riesce, quindi, ad eliminare gli artefatti, anche se la sorgente del movimento deve essere abbastanza lontana dalla zona di interesse ed a ridurre il rumore di fondo nelle zone nere, ma si ha perdita di segnale dove la fase del segnale NMR oscilla o varia molto.