Introduzione
La prestazione di un veicolo è legata a molti fattori limitanti, quali le sue caratteristiche di aderenza, la coppia sviluppabile dal motore e l’abilità del pilota. Molte case automobilistiche sentono l’esigenza di sviluppare dei programmi di calcolo che permettano di determinare la massima prestazione di una vettura prescindendo dai limiti del pilota.
Scopo della tesi, svolta in collaborazione con il Centro Ricerche FIAT di Orbassano, è la de-terminazione della traiettoria ottima, intesa come minimo tempo di percorrenza, all’interno di un tracciato assegnato, ipotizzando che il veicolo sia guidato da un pilota ideale, capace di sfruttare sempre al massimo l’aderenza disponibile. In questo modo, la traiettoria risulta solo funzione del particolare veicolo utilizzato e risulta indipendente dalle capacità di guida dei singoli piloti.
Nell’analisi svolta non è stata considerata la coppia del motore come fattore limitante della prestazione della vettura. Il limite da noi utilizzato è legato esclusivamente alle caratteristiche di aderenza. Tale caratteristica è fornita mediante due curve, dette curve di aderenza del vei-colo, o diagrammi g-g. Per tracciare tali curve si fa riferimento alle accelerazioni, longitudinale
(ax) e laterale (ay), applicate al baricentro della vettura, a cui è soggetto il veicolo durante la
marcia.
Viene quindi tracciato per punti, sulla base di rilevamenti sperimentali, un diagramma sul
pi-ano ax− ay, dal quale è possibile ricavare, in corrispondenza di un numero discreto di rapporti
ax/ay, il valore amax =pa2x+ a
2
y dell’accelerazione massima sviluppabile dal veicolo.
Rappresentazione delle traiettorie
La prima operazione compiuta per la completa risoluzione del problema è stata la ricerca di una opportuna rappresentazione matematica delle traiettorie che rispetti i vincoli fisici e matematici imposti.
Consideriamo un modello di veicolo in cui la massa sospesa (cassa) sia assimilabile ad un unico corpo rigido e le 2 masse non sospese siano di entità trascurabile rispetto alla cassa. Trascuriamo, inoltre, i moti di rollio, beccheggio e scuotimento della massa sospesa. In prat-ica il veicolo è assimilato ad un punto materiale, con massa concentrata nel baricentro della
vettura, che si muove su di un piano X0− Y0 (vedi figura 1).
Considerando la deformabilità della carcassa dei pneumatici ed ipotizzando costante il
co-efficiente di aderenza nel contatto tra ruote e strada, l’accelerazione centripeta (ay), a cui il
veicolo è soggetto durante la percorrenza di una curva, non può presentare delle discontinuità. Pertanto la curvatura della traiettoria eseguita dal baricentro della vettura deve presentare
una continuità di tipo C1
.
Di conseguenza le traiettorie tracciate sul piano stradale dal baricentro del veicolo devono
essere rappresentate da una famiglia di curve di classe C3
.
Il tipo di curva da noi utilizzato, che soddisfa le condizioni sopra esposte, è la spline del quarto
ordine. Si tratta di curve polinomiali a tratti, di classe C3
interpolanti una assegnata serie di
punti sul piano X0− Y0.
Tempo di percorrenza
Il nostro scopo è il calcolo del tempo di percorrenza di una traiettoria p(s) sul piano X0− Y0
sfruttando al massimo le caratteristiche di aderenza della vettura.
Dalle curve di aderenza di un veicolo è possibile ricavare l’accelerazione laterale massima sviluppabile in condizioni di puro impegno d’aderenza laterale da parte dei pneumatici.
Figura 1: Sistema di riferimento
Conoscendo l’espressione della curvatura k(s), è possibile calcolare la velocità massima, punto per punto, con cui il veicolo può percorrere tale traiettoria.
vmax(s) =
ra
y max
k(s) (1)
Nei tratti di rettilineo, in cui il valore della curvatura k è nullo, la velocità massima ammissibile ha come vincolo superiore la velocità massima del veicolo in rettilineo. Nel nostro studio tale limite superiore è posto pari a 60 m/s, circa 210 km/h.
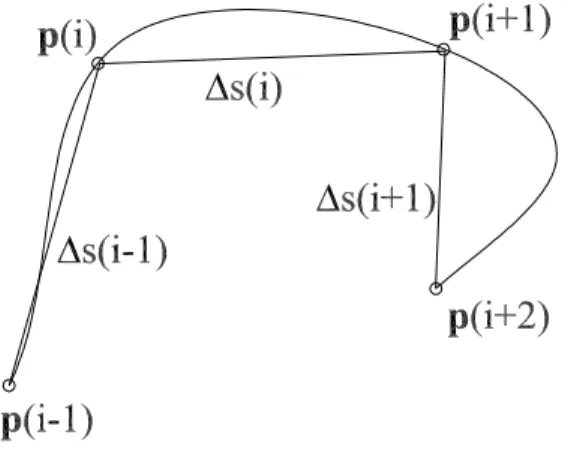
Prendiamo n punti appartenenti alla curva e tracciamo la poligonale congiungente tali punti (vedi figura 2).
Si definisce
∆s(i) =k p(i + 1) − p(i) k (2)
passo di discretizzazione per il calcolo del tempo di percorrenza.
Supponiamo che sia nota nel punto i la velocità v(i) effettiva del veicolo e tale che v(i) sia
minore di vmax(i). É allora possibile ricavare l’accelerazione centripeta ay(i) a cui è sottoposto
il veicolo in tale punto tramite la relazione
ay(i) = k(i)v(i)
2
(3)
È disponibile una parte dell’aderenza (ay(i) < ay max), sfruttabile per accelerare il veicolo.
È possibile ricavare dalle curve d’aderenza il valore massimo dell’accelerazione longitudinale
sviluppabile nel punto i, ax(i) > 0.
Si calcola quindi il tempo necessario a percorrere il tratto di polinomiale intercorrente tra il punto i ed il punto i + 1, supponendo che il moto in questo tratto avvenga ad accelerazione costante. Tale tempo risulta infatti
t(i) = −v(i) +pv(i)
2+ 2a
x(i)∆s(i)
ax(i)
(4) Noto tale valore è possibile calcolare la velocità posseduta dal veicolo nel punto i + 1
v(i + 1) = v(i) + ax(i)t(i) =pv(i)2+ 2ax(i)∆s(i) (5)
Se la velocità risultante è inferiore alla velocità massima calcolata secondo la relazione (1) nel punto i + 1 si effettuano le stesse operazioni appena descritte e si procede verso punto il successivo della curva.
Nel caso in cui la velocità nel punto i + 1 sia superiore alla velocità massima ammissibile in tale punto bisogna operare in modo differente.
Nota l’accelerazione ay(i) è possibile sfruttare la parte disponibile di aderenza per frenare il
veicolo, anziché accelerarlo, ricavando dai diagrammi g − g il nuovo valore dell’accelerazione
longitudinale ax(i) < 0.
Utilizzando tale valore si procede al calcolo del nuovo tempo di percorrenza e della nuova velocità v(i + 1) attraverso le relazioni (4) e (5).
Nel caso in cui tale nuovo valore sia inferiore al massimo realizzabile nel punto i + 1 si può procedere al calcolo del tempo nel tratto successivo; nel caso in cui tale valore risulti ancora superiore a quello massimo è necessario inserire un ulteriore tratto in frenatura precedente a quest’ultimo. La procedura si ripete finchè v(i + 1) non risulta essere inferiore alla mas-sima velocità realizzabile nel medesimo punto. Ottenuto un valore ammissibile è possibile procedere al calcolo del tempo del tratto successivo.
Noti i tempi impiegati a percorrere i singoli tratti di poligonale, per conoscere il tempo di percorrenza complessivo della traiettoria è sufficiente sommare i singoli tempi intermedi.
La precisione, nel calcolo del tempo di percorrenza, dell’algoritmo esposto è funzione della dimensione del passo di discretizzazione ∆s scelto.
La scelta della dimensione di tale variabile è un compromesso tra la corretta rappresentazione della curva ed un tempo di calcolo ragionevole per poter effettuare successivamente un pro-cesso di ottimizzazione, in cui molte traiettorie saranno confrontate per poter determinare quella ottima.
Due fattori portano a dover ridurre il ∆s necessario ad una adeguata soluzione: la corretta rappresentazione della lunghezza della curva (la lunghezza della poligonale sopra descritta è un approssimazione per difetto dell’effettiva lunghezza, approssimazione tanto più precisa, quanto la dimensione dei tratti ∆s si riduce) e la corretta identificazione del punto iniziale di frenata ed inizio accelerazione (nei singoli tratti infatti l’accelerazione agente sul veicolo è considerata costante).
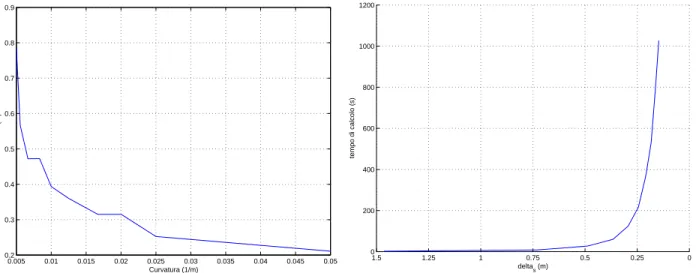
Allo scopo di determinare la dimensione del passo d’integrazione, che consentisse la precisione del calcolo del tempo di percorrenza della traiettoria al centesimo di secondo, sono stati con-frontati i risultati ottenuti, al variare della dimensione dei segmenti ∆s(i), per una serie di
0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.05 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 Curvatura (1/m) Delta s (m) 0 0.25 0.5 0.75 1 1.25 1.5 0 200 400 600 800 1000 1200 delta s (m) tempo di calcolo (s)
Figura 3: Passo d’integrazione che garantisce la convergenza del tempo di percorrenza al variare
della curvatura e tempo di calcolo per una curva a raggio costante
curve a raggio costante e variabile tra venti e duecento metri. Il raggiungimento di tale con-dizione dipende dal raggio della traiettoria effettuata. I risultati di tale studio sono mostrati in figura 3.
Per confermare l’ipotesi che il passo d’integrazione sia funzione della curvatura, si è proceduto ad un analogo studio su curve con raggio di curvatura variabile.
In figura 3 è anche mostrato l’andamento del tempo di calcolo, in funzione del ∆s utilizzato, per la serie di curve a raggio costante. E’ evidente che tale tempo aumenta repentinamente al diminuire del passo d’integrazione.
Modellazione del problema di ottimizzazione
Come scritto nei paragrafi precedenti, una traiettoria viene determinata attraverso la definizione di una serie di n punti di passaggio. Per assegnare tali punti si è operato nel modo seguente: definiamo tracciato due linee parallele, in modo che possa essere definita una normale comune,
Figura 4: Assegnazione dei punti di passaggio per il tracciamento di una generica traiettoria
dette rispettivamente bordo destro e bordo sinistro.
(vedi figura 4). Il generico punto di passaggio Pi viene fatto variare lungo tale perpendicolare per generare una famiglia di traiettorie. La posizione di tale punto è quindi funzione di una sola variabile. Se il valore di tale variabile è uguale a 0, il punto si trova sul bordo interno della corsia, mentre se è pari ad 1 il punto di passaggio è localizzato sul bordo esterno. Una generica traiettoria è quindi indentificata da un vettore di n componenti, ognuna delle quali rappresenta la posizione del generico punto di passaggio su ciascuna delle perpendicolari tracciate.
È necessario limitare il più possibile il numero di tali perpendicolari, in modo da poter raggiun-gere velocemente la convergenza dell’algoritmo di ottimizzazione (il numero di perpendicolari, infatti, corrisponde al numero di variabili da ottimizzare).
D’altra parte è necessario che la traiettoria ottimale risultante rimanga all’interno del traccia-to stradale e che il nostro processo garantisca l’esplorazione di tutte le parti della carreggiata. Affinchè ciò avvenga è necessario incrementare il numero di perpendicolari che rappresentano la traiettoria. A seguito di varie prove si è potuto concludere che è necessario inserire una perpendicolare al tracciato stradale, lungo una curva, ogni 20-30 gradi.
Affinché la spline risultante dall’interpolazione abbia curvatura nulla agli estremi (per ripro-durre l’ingresso e l’uscita su un rettilineo), sono stati inseriti due gruppi di quattro punti sul rettilineo d’ingresso e d’uscita che sono obbligati a generare un percorso rettilineo.
L’algoritmo di ottimizzazione sviluppato è basato sugli algoritmi genetici. Gli algoritmi ge-netici risolvono un determinato problema ricorrendo ad una popolazione di soluzioni che, inizialmente casuali e che quindi non rappresentano una “buona” soluzione del problema, ven-gono poi fatti evolvere per un certo numero di generazioni successive, fino a soddisfare un opportuno criterio di fermata (tipicamente un prestabilito numero di generazioni).
A causa dei lunghi tempi di calcolo legati alla dimensione dei tratti ∆s che garantiscono la precisione del centesimo nel calcolo del tempo di percorrenza, è stato sviluppato un processo di ottimizzazioni “a cascata”.
Si è effettuata una prima ottimizzazione con un passo di integrazione più ampio rispetto a quello necessario per la convergenza, che ci consentisse, con tempi di calcolo ragionevoli, di limitare la nostra successiva ricerca in zone ristrette del tracciato.
A tale operazione preliminare è seguita una successiva ottimizzazione, questa volta realizza-ta con il passo d’integrazione corretto, che identifica la traiettoria ottima. In realizza-tale modo è possibile confrontare un numero di curve sensibilmente inferiore all’operazione precedente, in quanto risultano escluse quelle traiettorie che sicuramente non sono performanti ai fini del tempo di percorrenza.
Ottimizzazione di parti di tracciato
Si è proceduto all’ottimizzazione di un breve tratto di circuito, che si compone di una curva a raggio decrescente e due curve a raggio costante di 90 e 45 gradi, intervallate da un breve rettilineo.
Il numero di perpendicolari inserite lungo il tracciato è pari a 16. In ingresso è posto un tratto in rettilineo lungo 150 metri che consente al veicolo uno spazio di frenata sufficiente per poter partire con la velocità massima.
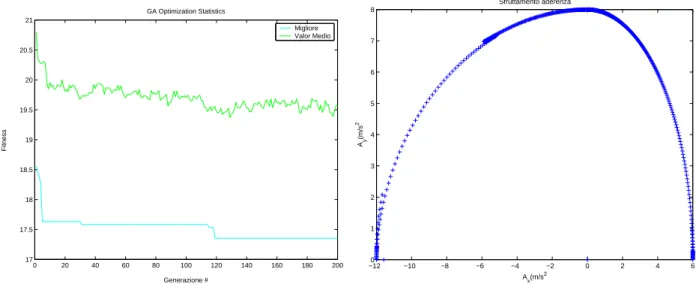
Nella figura 5 è mostrato l’andamento del processo di ottimizzazione. È possibile notare come la media della fitness della popolazione tenda al valore di quella dell’individuo migliore e la deviazione standard della stessa tenda a zero. È inoltre mostrato l’andamento delle accelerazioni. Risulta evidente come tali punti rimangano sulla frontiera dell’ellisse d’aderenza considerato, infatti il pilota “ideale” utilizzato è capace di sfruttare sempre al limite l’aderenza disponibile.
In figura 6 è mostrato l’andamento della traiettoria ottimizzata. Di seguito (figure 7 e 8) 0 20 40 60 80 100 120 140 160 180 200 17 17.5 18 18.5 19 19.5 20 20.5 21 GA Optimization Statistics Fitness Generazione # Migliore Valor Medio −120 −10 −8 −6 −4 −2 0 2 4 6 1 2 3 4 5 6 7 8 Ax(m/s2 Ay (m/s 2 Sfruttamento aderenza
Figura 5: Andamento del processo di ottimizzazione e delle accelerazioni agenti sul veicolo
sono mostrati l’angolo, ψ(s), formato dal vettore tangente alla traiettoria con l’asse X0, la
curvatura e l’andamento della velocità, confrontata con la velocità massima (in rosso) definita della equazione 1. 0 20 40 60 80 100 120 140 160 −20 0 20 40 60 80 100 Traiettoria metri metri
0 50 100 150 200 250 300 350 −0.04 −0.03 −0.02 −0.01 0 0.01 0.02 0.03 Curvatura metri 1/R c (1/m) 0 50 100 150 200 250 300 350 −1 −0.5 0 0.5 1 1.5 2 Angolo ψ metri ψ (rad)
Figura 7: Andamento della curvatura e dell’angolo ψ(s)
−150 −100 −50 0 50 100 150 200 250 300 350 10 15 20 25 30 35 40 45 50 55 60 Velocità di percorrenza metri velocità (m/s) v max v effettiva
Figura 8: Confronto tra la velocità effettiva del veicolo e quella in condizioni di puro impegno di aderenza laterale
Validazione del modello realizzato
Si è voluto a questo punto confrontare la traiettoria ideale ottenuta dal nostro algoritmo di ottimizzazione con i dati raccolti in una campagna di prove condotte da vari piloti (profes-sionisti e non) su di un simulatore di guida, allo scopo di validare i risultati ottenuti.
Il simulatore di guida utilizzato si basa su di un modello di veicolo complesso, in cui il passo, i semipassi, le carreggiate, l’altezza del baricentro, le curve elastocinematiche delle sospensioni ed i pneumatici sono tipici di una vettura del segmento C, in particolare una Alfa Romeo 147. Il circuito di prova utilizzato si compone di due “esse” consecutive interposte da un breve ret-tilineo (vedi figura 9). La larghezza della corsia è pari ad 8.5 metri ed è costante per l’intera lunghezza del tracciato. Il veicolo parte da fermo all’ingresso del primo rettilineo.
−10000 −800 −600 −400 −200 0 200 400 600 800 1000 200 400 600 800 1000 1200 1400 1600 metri metri Tracciato
Figura 9: Tracciato di prova
−120 −10 −8 −6 −4 −2 0 2 4 6 1 2 3 4 5 6 7 8 9 ax (m/s2) ay (m/s 2) Ellisse aderenza coeff. aderenza=0.6 coeff. aderenza=1.2 0 500 1000 1500 2000 2500 3000 −0.015 −0.01 −0.005 0 0.005 0.01 0.015 Curvatura metri 1/R c (1/m) coeff. aderenza=0.6 coeff. aderenza=1.2
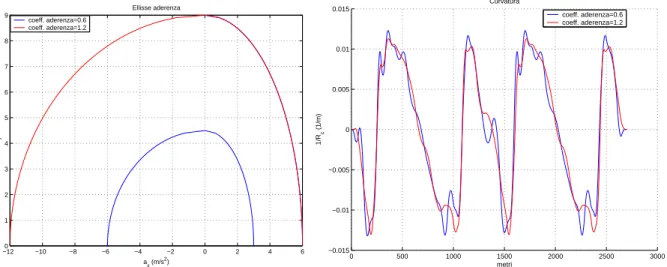
Figura 10: Confronto tra le curvature delle traiettorie ottimizzate variando il coefficiente d’aderenza
prima esse sia ripetuta anche nella seconda. La velocità d’uscita dalla prima esse è infatti relativamente bassa, circa 20 m/s, quindi l’ipotesi effettuata non limita la generalità della soluzione trovata.
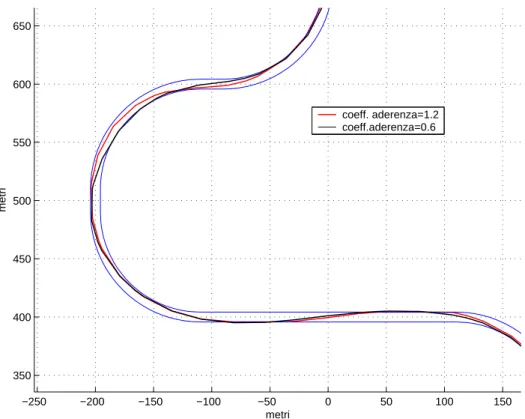
È stato inizialmente studiato come varia la traiettoria ottimale in funzione del coefficiente d’aderenza. Si è voluto in questo modo mostrare come varia la traiettoria da eseguire in con-dizioni di scarsa aderenza, tipicamente asfalto bagnato. I risultati sono mostrati nelle figure 10 e 11.
Prima di procedere al confronto tra la traiettoria ottimizzata e quelle effettuate dai piloti, è necessario considerare il limite in trazione che genera sistema cambio+motore implementato nel simulatore.
Infatti, analizzando il comportamento di tutti i piloti, si può rilevare come tutto il circuito venga affrontato in terza marcia e che, con tale rapporto di trasmissione, la massima
accel-erazione sviluppabile in condizioni di pura trazione è pari a 3 m/s2
. I punti del diagramma g − g che superano tale valore sono realizzati con le marce inferiori, utilizzate nel primo tratto di rettilineo. Appare quindi necessario un ulteriore processo di ottimizzazione che imponga
−250 −200 −150 −100 −50 0 50 100 150 350 400 450 500 550 600 650 Traiettoria metri metri coeff. aderenza=1.2 coeff.aderenza=0.6
Figura 11: Confronto tra le traiettorie ottimizzate variando il coefficiente d’aderenza
un limite sull’aderenza che tenga conto delle curve sperimentali. Inoltre si è considerato come tempo di percorrenza quello a partire dall’ingresso della prima curva.
La curva ottima trovata è stata quindi confrontata con il migliore risultato ottenuto da un pilota professionista e quello ottenuto da un pilota non professionista.
Il tempo impiegato per percorrere il tratto di strada considerato è stato pari a 90.4 e 92.73 secondi, rispettivamente dal pilota professionista e non professionista. Il tempo risultante dal processo di ottimizzazione è stato pari a 80.57 secondi.
Le traiettorie effettuate dai piloti sono molto simili a quella risultante dal processo di ottimiz-zazione (vedi figura 13), ma è interessante notare come la curva ottimizzata tenda a sfruttare maggiormente la zona di frenatura rispetto ai diagrammi sperimentali (figura 12).
−12 −10 −8 −6 −4 −2 0 2 4 6 −10 −8 −6 −4 −2 0 2 4 6 8 10 a x (m/s 2) ay (m/s 2) Sfruttamento aderenza −12 −10 −8 −6 −4 −2 0 2 4 6 −10 −8 −6 −4 −2 0 2 4 6 8 10 a x (m/s 2) ay (m/s 2) Sfruttamento aderenza
−200 −150 −100 −50 0 50 100 350 400 450 500 550 600 Traiettoria metri metri traiettoria ottima (t=80.57s) traiettoria migliore pilota prof. (t=90.4s)
−250 −200 −150 −100 −50 0 50 100 150 350 400 450 500 550 600 650 Traiettoria metri metri
traiettoria ottima (t=80.57sec) traiettoria pilota non prof. (t=92.73)
Figura 13: Confronto tra la traiettoria ottima e quelle realizzate da un pilota professionista (a
sinistra) ed uno non-professionista
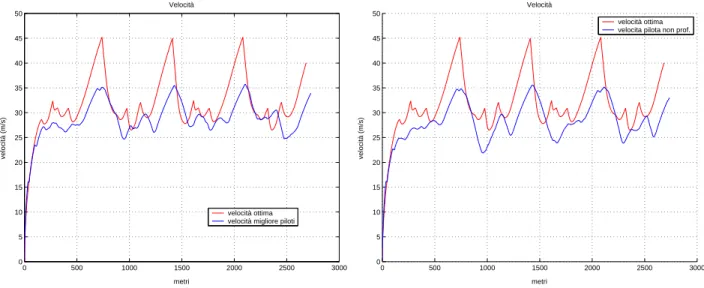
0 500 1000 1500 2000 2500 3000 0 5 10 15 20 25 30 35 40 45 50 metri velocità (m/s) Velocità velocità ottima velocità migliore piloti
0 500 1000 1500 2000 2500 3000 0 5 10 15 20 25 30 35 40 45 50 metri velocità (m/s) Velocità velocità ottima velocita pilota non prof.
Figura 14: Andamento della velocità per un pilota professionista (a sinistra) ed uno
non-professionista
Conclusioni
È stato qui presentato lo sviluppo ed i principi di funzionamento del software realizzato in questo lavoro di collaborazione con il CRF di Orbassano. Tale software, la cui validità è stata provata mediante la campagna di prove descritte, è quindi in grado di ottimizzare la traiettoria di qualsiasi circuito assegnato, conoscendo le caratteristiche di aderenza della vettura presa in esame.
Tale strumento è indispensabile per individuare le massime prestazioni realizzabili da un veicolo, a partire dalle quali è possibile procedere allo sviluppo dei sistemi controllati, sia in termini di feeling di guida che di sicurezza attiva.