CAPITOLO 1
PROBLEMI DI TRASMISSIONE DEL SEGNALE
LEGATI ALLE PLC
La trasmissione sulle PLC presenta diversi problemi; le cause di questi ultimi sono da attribuire alla distorsione del segnale e al rumore. La distorsione del segnale è dovuta alla dipendenza dalla frequenza dei parametri caratteristici dei conduttori e alla propagazione del segnale di tipo multipath.
Possiamo sintetizzare nel seguente modo i problemi più importanti legati all’utilizzo delle PLC:
•
Rumore nelle linee di potenza•
Attenuazione delle linee di potenza•
Variazione dell’impedenza delle linee di potenza•
Campi irradiati nelle linee di potenza•
Mancanza di un protocollo di comunicazione di rete standard1.1
- Attenuazione
L’ attenuazione del segnale in una linea di potenza e la variazione di impedenza di una linea di potenza possono essere uno la conseguenza dell’altro; sono due aspetti che tratteremo singolarmente ma questo non vuol dire che siano completamente indipendenti.
1.1.1 - Cause dell’attenuazione
Le cause che determinano l’attenuazione del segnale nelle linee di potenza sono diverse. Da studi effettuati in precedenza è stato osservato che, tipicamente il segnale inviato in un cavo non utilizzato per la trasmissione dell’energia elettrica, richiede un livello di potenza sufficiente per la comunicazione, tra 3 e 5 dB inferiore rispetto a quello delle powerline.
La prima causa di questo fenomeno è da attribuire al segnale di accoppiamento tra le tre fasi della linea di potenza. La seconda è invece dovuta alle modalità di collegamento dei carichi alla linea elettrica.
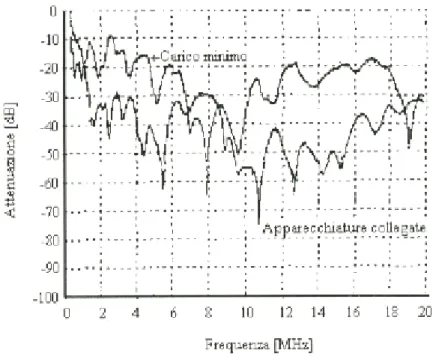
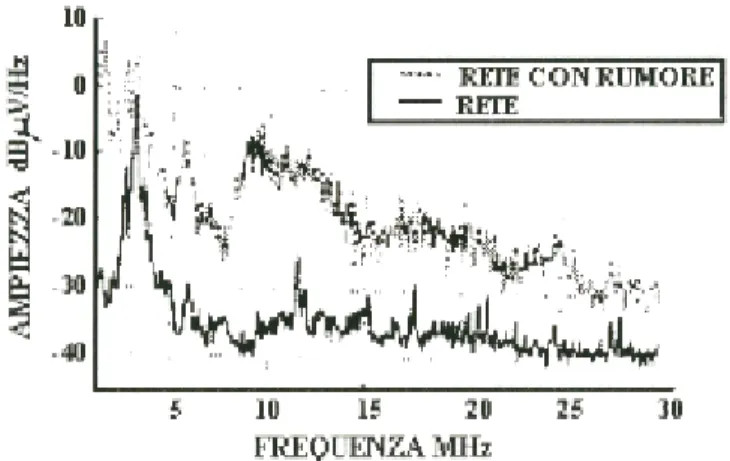
In fig. 1.1, ricavata per distanze di circa 30 m, è indicato il diverso comportamento della linea elettrica al variare della frequenza.
igura 1.1 Andamento dell’attenuazione al variare della frequenza.
ella fig. 1.2 viene rappresentato il diverso comportamento della linea elettrica al
F
N
Figura 1.2 Andamento dell’attenuazione al variare del carico.
Quando le apparecchiature totali vengono collegate alla linea, c’è un aumento dell’attenuazione da 20 a 30 dB rispetto all’attenuazione media che aumenta all’aumentare dei carichi collegati alla linea.
Questi peggioramenti sono dovuti alle risonanze causate dagli effetti reattivi associati alle apparecchiature alimentate, presenti in linea che generano veri e propri filtri risonanti. Sono stati trovati, invece, risultati interessanti facendo il paragone fra una linea con apparecchi collegati all’alimentazione tutti in un punto della linea ( cioè tutti alla stessa presa) ed apparecchi collegati come in genere accade (cioè ognuno alla sua presa).
Si è visto che nel caso di apparecchiature collegate tutte alla stessa presa di corrente elettrica si ha un’attenuazione rispetto al caso di apparecchiature collegate a prese elettriche diverse.
Possiamo quindi affermare che l’attenuazione varia sia con l’ubicazione dei carichi che con la variazione di carico nel tempo sulla linea di potenza.
Non sempre infatti un carico è collegato alla stessa presa ma il più delle volte non ha una sistemazione fissa, tutto ciò crea una variazione acuta dell’attenuazione con picchi imprevedibili nel tempo.
1.2
- Variazione dell’impedenza
Da prove effettuate su spezzoni di cavo si è visto che l’impedenza varia significativamente con la frequenza in un range che va da qualche ohm a qualche kohm.
Esistono valori di frequenza in corrispondenza dei quali l’impedenza raggiunge dei picchi molto alti e la rete si comporta come un circuito risonante parallelo. In questo range di frequenza la rete mostra anche un comportamento induttivo o capacitivo. L’impedenza caratteristica di un cavo powerline è di circa 90 ohm. L’impedenza di rete è influenzata oltre che dall’impedenza caratteristica della linea, anche dalla topologia della rete e dai carichi collegati che possono far variare in maniera decisiva le impedenze e di conseguenza l’impedenza della linea. A frequenze particolari, la linea introduce effetti non lineari che causano disadattamento di impedenza con conseguenti riflessioni di segnali ed echi.
Le riflessioni e la discontinuità di impedenza, causano echi del segnale trasmesso che generano variazione di impedenza e quindi attenuazione.
1.2.1 - Approssimazione tramite canale multipath
Possiamo vedere il canale powerline come un ambiente multipath; in questa ottica ogni segnale trasmesso arriva al ricevitore sul percorso diretto e su quello ritardato ed anche attenuato.
Per questo motivo è stato sviluppato un modello di eco che rispetta fedelmente i parametri e la realtà della rete.
1.2.1.1 - Definizione del sistema in esame
Per poter studiare la propagazione del segnale multipath possiamo usare un esempio facilmente analizzabile.
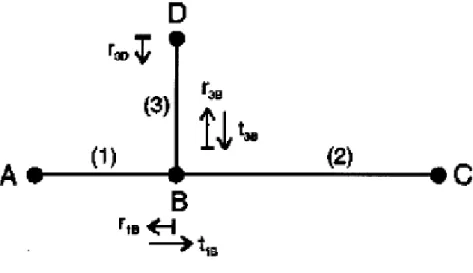
Consideriamo la porzione di rete raffigurata nella figura sottostante.
Figura 1.3 Propagazione del segnale multipath.
I segmenti 1, 2, 3 di lunghezza, rispettivamente l1, l2, l3, e di impedenza
caratteristica ZL1, ZL2, ZL3, sono gli unici collegamenti presenti nella porzione di
rete considerata.
Possiamo semplificare la trattazione assumendo A e C accoppiati per mezzo delle impedenze Za=ZL1 e Zc=ZL2. I punti B e D sono caratterizzati dai coefficienti di
riflessione r1B, r3D e r3B e dai coefficienti di trasmissione t1B e t3B.
Avendo definito il sistema in questo modo, a causa delle riflessioni multiple, il segnale si può propagare seguendo infiniti percorsi (per esempio A B C, A B D B C, A→B→D B→C, etc.).
→ →
→ → → → →
Possiamo caratterizzare ogni percorso con un peso gi, dato dal prodotto della
riflessione e della propagazione lungo il percorso. Tutti i coefficienti di riflessione e di trasmissione dei tratti successivi danno un contributo minore rispetto ai primi. Questo è dovuto al fatto che l’impedenza che si vede ai capi di una connessione parallela di due o più cavi, è minore dell’impedenza caratteristica del singolo cavo. In conseguenza di ciò per il fattore gi sarà valida la seguente relazione:
gi ≤1
Maggiore sarà il numero di riflessioni lungo il percorso e minore sarà il modulo di g. I percorsi più lunghi presentano un’attenuazione talmente elevata da rendere trascurabile il loro contributo sul segnale che arriverà a destinazione.
E’ questo il motivo che ci permette di considerare solo N degli infiniti percorsi. Possiamo calcolare il ritardo τi di ogni percorso utilizzando la seguente relazione: p i r i i d c d ν ε τ = = 0
dove ε rappresenta la costante dielettrica del materiale isolante, cr 0 la velocità
della luce e di la lunghezza dei cavi.
Le perdite nei cavi provocano un’attenuazione A(f,d) che aumenta con la lunghezza degli stessi e con la frequenza.
1.2.1.2 - Risposta in frequenza del sistema
La risposta in frequenza del canale tra i punti A e B possiamo esprimerla con la seguente relazione: j f i i N i i A f d e g f H 2πτ 0 ) , ( ) ( − = ⋅ =
∑
(1) La risposta in frequenza H(f) posso esprimerla anche in funzione della costante di propagazione gamma:La costante γ dipende dai parametri primari della linea R, L, G, C e dalla tensione V(x) a distanza x nel seguente modo:
H e l e f l j f l x V l x V f = − ⋅ = − ⋅− ⋅ = = = ( ) ( ) ) 0 ( ) ( ) ( γ α β (3)
Possiamo stimare in maniera grossolana i parametri del cavo C ed L a partire dalla conoscenza delle dimensioni geometriche e delle proprietà del materiale.
La conduttanza G è influenzata principalmente dal fattore di dissipazione del materiale elettrico e quindi proporzionale ad f.
La resistenza per unità di lunghezza R è proporzionale a f perché fortemente influenzata dall’effetto pelle; questo discorso è valido per frequenze dell’ordine dei MHz. In particolare nel range di frequenze di nostro interesse valgono le seguenti relazioni: R<<ω L e G<<ω C.
1.2.1.3 - Dipendenza di H(f) dai parametri caratteristici della linea
La costante di propagazione γ può essere determinata utilizzando la seguente espressione semplificata:
γ =k1 f +k2 ⋅f + jk3⋅ f (4)
dove k1, k2 e k 3 sono costanti che dipendono dalla caratteristiche e dalla
geometria del materiale. La costante γ è complessa e si nota che la sua parte reale α , detto fattore di attenuazione, cresce in maniera proporzionale ad f o a f ; questo avviene a seconda del fatto che sia predominante k1 o k2.
Basandoci su queste osservazioni e su ulteriori misure effettuate sulla risposta in frequenza, è stata ricavata la formula approssimata della costante di attenuazione riportata di seguito:
α(f)=a0 +a1⋅ fk (5)
Possiamo utilizzare questa formula per caratterizzare l’attenuazione del canale powerline tramite un unico parametro che può essere facilmente ricavato da misure sulla funzione di trasferimento.
L’espressione finale dell’attenuazione di un collegamento powerline è la seguente:
A(f,d)=e−α(f)⋅d =e
[
−(a0+a1⋅fk)⋅d]
(6)I parametri a0, a1 e k non si possono ricavare facilmente dalla conoscenza delle
caratteristiche dei cavi; questo comunque non vuol dire che il modello adottato non sia valido. Possiamo infatti ricavare i valori dei parametri da misure effettuate sulla funzione di trasferimento.
Sostituendo l’espressione (6) nella (1) otteniamo la forma finale della funzione di trasferimento del modello adottato per descrivere la propagazione del nostro segnale multipath. H gi f
[
(a a fk)di]
j f i N i i f e e e g f ϕ ( ) 2πτ 1 1 0 ) ( ) ( − + ⋅ ⋅ − =∑
= (7)Si può notare il contributo di tre termini distinti. Il primo termine è legato al ritardo, il secondo è legato all’ attenuazione del cavo con andamento di tipo passa-basso e il terzo è legato al peso gi che tiene conto del contributo dei fattori
di riflessione e attenuazione; di solito, quest’ultimo termine dipende è un valore complesso dipendente dalla frequenza.
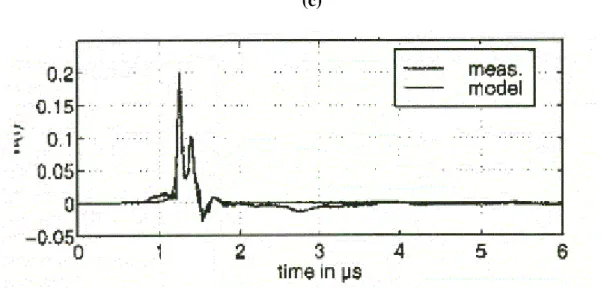
Per verificare la validità di questo modello, vengono in genere confrontati i risultati della simulazione eseguita tramite la (7) e delle misurazioni effettuate con un modello di rete avente sia quella topologia che quelle caratteristiche e dimensioni geometriche descritte precedentemente. Supponiamo, ad esempio, che il trasmettitore sia posto in corrispondenza del punto A e il ricevitore del punto C.
A e C sono accoppiati con l’impedenza caratteristica del cavo e il punto B, aperto, presenta un coefficiente di riflessione r=1. La sezione 1 ha una lunghezza di 30 m, la sezione 2 di 170 m e la sezione 3 di 12 m.
Le sezioni 1 e 2 presentano un’impedenza caratteristica di circa 45 ohm, la sezione 3 presenta, invece, un’impedenza caratteristica di 70 ohm.
Nella figura 1.17 sono riportati i risultati delle misure effettuate e quelli della simulazione basata sul modello descritto sopra in cui si è preso N=4.
(c)
Figura 1.4 Simulazione e risultati sperimentali con N=4; a) modello di H(f); b) fase di H(f); c) risposta impulsiva.
1.3 - Classificazione dei tipi di rumore
Diversamente dagli altri canali di comunicazione la linea di potenza presenta un livello di rumore caratterizzato da un’elevata variabilità nel tempo e nello spazio; questo è dovuto alla forte dipendenza del rumore dai carichi elettrici collegati in rete, i quali introducono nella rete un rumore caratteristico a seconda del tipo utilizzato.
Possiamo suddividere i disturbi che si sovrappongono al segnale utile in persistenti e transitori.
Il disturbo persistente è ulteriormente suddivisibile in coerente, se presenta uno spettro di frequenza definito, o casuale, se il suo spettro presenta una densità di potenza statisticamente costante.
Un disturbo viene definito transitorio quando alla fine di un suo evento ne segue un altro. Per questa definizione è considerato transitorio non solo un fenomeno isolato, ma anche una sequenza di impulsi uguali e separati un tempo.
La classificazione è stata fatta durante il Proceedings of the IEEE National Symposium on Electromagnetic Compatibility tenuto in U.S.A nel 1989.
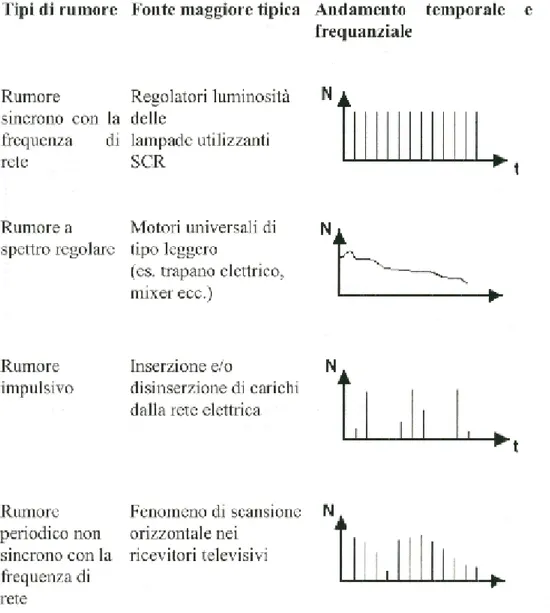
Esaminiamo le sorgenti di rumore più significative che possiamo riassumere in cinque principali categorie in base al tipo di disturbo che generano.
In fig. 1.5 è mostrato l’andamento temporale o frequenziale del disturbo per ciascuna categoria.
1.3.1 - Rumore sincrono con la frequenza di rete alla tensione di rete (50 o 60 Hz)
Questo tipo di rumore è causato da tutti i dispositivi che commutano in modo sincrono con la tensione di rete. Un esempio ci viene fornito dai regolatori di luminosità delle lampade che utilizzano componenti (SCR) che vengono periodicamente interdetti (tipicamente una o due volte) per una frazione del periodo del segnale di rete. Una conseguenza delle brusche interruzioni è il generarsi di rumore sotto forma di armoniche con frequenza di rete.
Maggiore è l’ordine dell’armonica considerata e minore è il contenuto energetico associato, per questo motivo possiamo ritenere che l’effetto di questo tipo di rumore è avvertito prevalentemente alle basse frequenze. Avremo quindi uno spettro del rumore caratterizzato da righe che sono le armoniche di ordine pari e dispari della frequenza di rete. La composizione di quest’ultime dipende dalla posizione del regolatore di luminosità, l’ampiezza delle righe dipende dalla resistenza della lampada, dal filtro passa basso presente nel regolatore, dal punto dell’onda di rete in cui viene effettuata l’interruzione e dalla resistenza della linea di potenza.
1.3.2 - Rumore a spettro regolare
Per spettro regolare si intende uno spettro distribuito su un ampio intervallo di frequenze, il cui andamento può essere assimilato ad un curva di tipo continuo che non presenta picchi.
Questo tipo di rumore è causato principalmente da dispositivi con parti meccaniche in movimento, la cui velocità di rotazione non è in relazione con la frequenza di rete.
I dispositivi a cui facciamo riferimento sono i motori universali, i quali, grazie al loro modesto peso, trovano una vasta applicazione in molti tipi di elettrodomestici di tipo portatile (ad esempio il mixer, l’aspirapolvere, il trapano elettrico, l’asciugacapelli). Il rumore in questi dispositivi è dovuto al contatto delle spazzole elettriche presenti all’interno del motore, queste sono la causa di microinterruzioni di corrente che avvengono ad una frequenza dipendente dalla velocità di rotazione del motore.
Si è visto da alcuni studi che per la maggior parte delle applicazioni si può assumere che lo spettro del rumore considerato sia quasi piatto e privo di linee. Nella fig. 1.6 è mostrato un esempio di disturbo dovuto ad un trapano elettrico. Il livello di rumore è di 10 e 30 dB sopra il rumore di fondo in quasi tutto il range di frequenza.
Figura 1.6 Disturbi dovuti a un motore universale.
1.3.3 - Rumore di tipo impulsivo ad evento singolo
Questo tipo di rumore è dovuto essenzialmente ad ogni fenomeno di inserzione/disinserzione di carichi sulla linea elettrica.
La commutazione ON/OFF di un dispositivo collegato in rete causa la relativa connessione e sconnessione del condensatore di cui è normalmente provvisto; quest’ultimo è utilizzato per la correzione del fattore di potenza provocando transitori di tensione che sono più o meno ampi temporalmente, a seconda del valore delle capacità del condensatore.
Il valore della capacità è scelto in modo da compensare l’effetto reattivo induttivo del carico e limitare quindi la circolazione di energia reattiva attraverso la rete di distribuzione. Per valori di capacità alta nella rete possono essere indotte delle oscillazioni smorzate. Potremmo considerare questi disturbi come transitori secondo la classificazione fatta nel 1989.
E’ un tipo di disturbo caratterizzato da una variazione di intensità nell’arco di un giorno. Questo può essere dovuto al tempo di uso dei carichi elettrici che vengono accesi durante il giorno e spenti la notte.
Dalle varie prove effettuate è risultato che:
- si ha un decadimento del livello del rumore con l’incremento della frequenza;
- il livello di rumore durante il giorno è più alto che di notte.
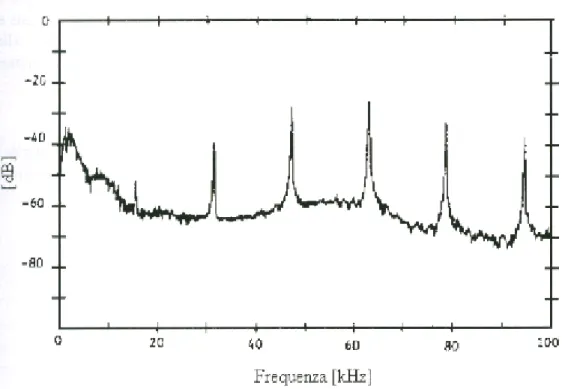
1.3.4 – Rumore periodico, non sincrono con la frequenza di rete
Lo spettro di questo rumore è formato da righe a frequenze non correlate con quella di rete. Esempi di dispositivi che producono questo tipo di rumore sono le lampade a fluorescenza, i ricevitori televisivi e gli alimentatori di tipo switching. Interessanti per questo tipo di analisi sono i ricevitori televisivi che producono delle armoniche a frequenza multipla di quella della scansione orizzontale (15625 per lo standard europeo PAL).
Figura 1.7 Disturbo dovuto a un ricevitore televisivo.
1.3.5 – Rumore di fondo “colorato”
Questo tipo di rumore è dovuto alla somma di numerose sorgenti di rumore a bassa potenza. Presenta una densità spettrale di potenza relativamente bassa variabile in un range che va da qualche minuto a qualche ora.
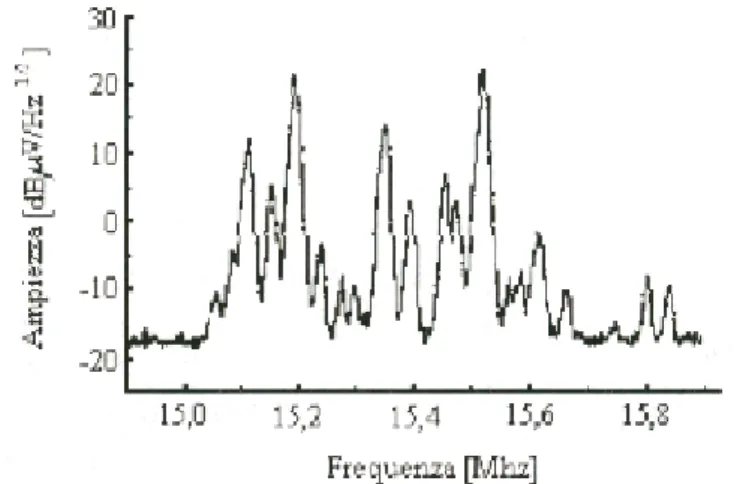
1.3.6 – Emissioni radio
Le emissioni radio sono una delle possibili cause che possono incrementare il livello di rumore in una linea di potenza. Le frequenze che possono creare problemi sono quelle delle onde lunghe (da 0.5 a 1.5 MHz), quelle delle onde corte e quelle delle emissioni radioamatoriali.
La modulazione utilizzata è quella di tipo AM con banda dim 4.5 Khz per la SSB-AM e di 9 KHz per la DSB-AM; per questo motivo possiamo considerare questi disturbi a banda stretta.
In figura 1.4 sono mostrati i disturbi creati da radio HF; sono presenti picchi di 40 dB sopra il livello di fondo.
Figura 1.8 Disturbi radio
Il livello di questo tipo di rumore dipende da vari fattori: - potenza del trasmettitore
- distanza dal trasmettitore
- condizioni di propagazione (ad esempio acqua, stagione, giorno, topologia circostante)
- topologia ed ubicazione della rete powerline
Possiamo quindi concludere affermando che il rumore di tipo 4 e 5 generalmente rimane stazionario per periodi di tempo che vanno da qualche secondo a qualche minuto; questo nel complesso genera il cosiddetto rumore di fondo, il rumore di tipo 1 e 3 hanno un campo di variabilità dell’ordine dei millisecondi o microsecondi.
Quando si verificano questi impulsi la densità spettrale di rumore cresce tanto da causare errori ai burst nella trasmissione del segnale.
1.4 – Caratterizzazione del disturbo impulsivo
1.4.1- Parametri caratteristici dell’impulso
In questo paragrafo verranno trattati e commentati alcuni parametri relativi agli andamenti tipici degli impulsi di rumore. Verrà fornito un modello della risposta nel tempo degli impulsi asincroni di rumore; il modello è ottenuto sulla base dei risultati di alcune misurazioni.
Quando effettuiamo l’analisi dei disturbi provocati dagli impulsi di rumore nella trasmissione del segnale ci chiediamo quando si verificano questi eventi e qual è
l’intensità degli impulsi.
Per sapere quando possiamo assumere gli impulsi come rettangolari e questo ci permette una caratterizzazione con pochi parametri.
L’andamento nel tempo possiamo descriverlo tramite una durata dell’impulso tw,
un tempo di arrivo tarr e unn tempo di interarrivo tiat o distanza tra gli impulsi td.
Per sapere l’intensità analizziamo l’ampiezza dell’impulso, la sua energia, la potenza o la densità spettrale di potenza.
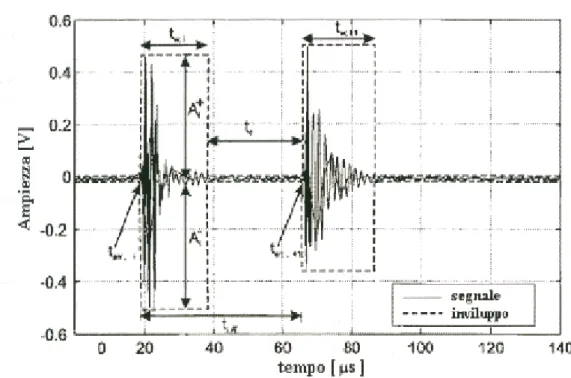
Nella fig. 1.9 è mostrato un impulso rettangolare e i suoi parametri caratteristici. Definiamo l’ampiezza dell’impulso nel seguente modo:
A=max
{
Ai+,Ai−}
La distanza tra due impulsi viene descritta tramite il tempo di interarrivo o la distanza tra gli impulsi definita come:
Figura 1.9 Rappresentazione nel dominio temporale dell’impulso e del suo inviluppo
Per la caratterizzazione può essere utile definire una funzione impulso imp(t), un’unità di ampiezza e di durata attraverso le quali il treno di impulsi nimptrain(t)
può essere espresso così:
nimptrain(t)=
∑
= ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − ⋅ N i wi i arr i t t t imp A 1 , ,I parametri Ai, tw e tarr sono delle variabili aleatorie le cui proprietà statistiche
sono state definite sulla base delle misure effettuate e verranno discusse in seguito. Dai parametri primari possiamo ricavare altri parametri, secondari, utili per la caratterizazione nel tempo dell’impulso di rumore.
Tra questi parametri ricordiamo l’impulse rate così definito: rimp(t)=
win imp T N
dove al numeratore troviamo il numero di impulsi Nimp, che si sono verificati in un
intervallo di osservazione Twin e l’intervallo di osservazione stesso.
Con un opportuno dimensionamento della finestra di osservazione è possibile determinare la frequenza dell’evento impulso in termini di impulso al secondo.
1.4.2 – Modello statistico dell’impulso: durata e distanza tra gli
impulsi.
E’ stato dimostrato che il rumore impulsivo può essere causa di errori sul singolo bit o errori a burst. E’ necessario un modello che descriva l’andamento nel tempo del rumore impulsivo; per far questo è necessario avere una discreta conoscenza dei dettagli fisici e avere a disposizione un software di simulazione abbastanza semplice. Il modello per gli impulsi periodici è ben definito dal comportamento deterministico; per gli impulsi casuali dobbiamo usare un modello stocastico. Un semplice esempio per costruire un modello degli errori casuali a burst è quello proposto da Gilbert-Elliot, i quali caratterizzano il tempo di interarrivo e la durata dell’impulso con un modello a due stati in cui la durata di ogni stato ha una distribuzione di tipo esponenziale. Il modello che offre una maggiore adattabilità e allo stesso tempo accuratezza è quello che si basa sull’utilizzo di una catena di Markov divisa con un numero di stati n=2.
Una catena di Markov descrive un processo casuale nel quale il comportamento futuro dipende solamente dallo stato presente o da un limitato intervallo di tempo trascorso.Considereremo in seguito solo gli istanti di tempo discreti (k = 1, 2, …). Per semplicità il tempo è unicamente rappresentato dalla variabile k.
a t k⋅
Il modo in cui si evolve il processo è descritto utilizzando n stati zi (i = 1, 2, …, n)
e la funzione di uscita Φ(k) all’istante k che dipende unicamente dallo stato presente come nella seguente relazione:
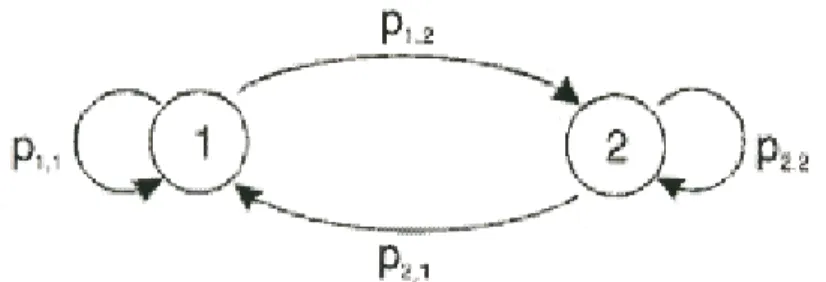
La catena di Markov può essere illustrata tramite il grafico in figura 1.11 nel quale i nodi rappresentano gli stati e i pesi degli archi le probabilità di transizione pi,j dallo stato j (i, j = 1, 2, …, n).
Figura 1.10 Rappresentazione di una catena di Markov con due stati
Le proprietà statistiche della catena di Markov sono descritte dalla matrice delle probabilità di transizione: P= ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − nn n n n n n n p p p p p p p p p p , 1 , 2 , 1 , , 2 2 , 2 1 , 2 , 1 2 , 1 1 , 1 K K K K K K
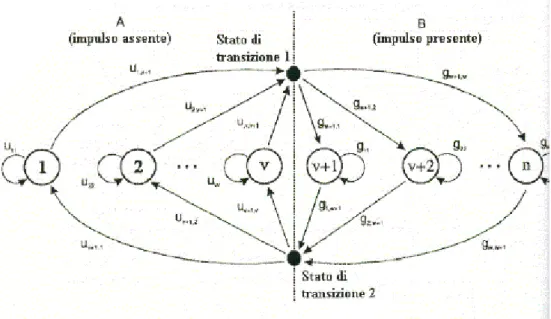
Per rappresentare il verificarsi di un impulso asincrono di rumore viene utilizzata una catena di Markov divisa.
Gli n stati zi (i = 1, 2, …, n) che rappresentano gli stati di rumore, sono suddivisi
in due gruppi:
a con (i = 1, 2, …, v) e B con (i = v+1, v+2, …, n). La funzione di uscita diventa:
⎩ ⎨ ⎧ ∈ ∈ = = Φ = Φ B i A i z k z k i , 1 , 0 ) ) ( ( ) (
Nel modello di Gilbert-Elliot relativo al caso particolare in cui n=2, w=1 e v=1, i v stati in A rappresentano il caso in cui non si verifichi nesun impulso mentre i w=n-v stati in B rappresentano il caso in cui si verifichi un impulso.
Figura 1.11 Rappresentazione di una catena di Markov divisa a n stati.
In la
atrice delle probabilità indipendenti di transizione U, nel caso di stati senza
G=
questa rappresentazione i due casi, A e B, possono essere descritti tramite m
impulso e G, nel caso di stati caratterizzati dalla presenza di un impulso.
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + + + + 0 0 0 0 0 0 0 , 1 2 , 1 1 , 1 1 , , 1 , 2 2 , 2 1 , 1 1 , 1 w w w w w w w w w w g g g g g g g g g K K M O O M M O K
U= ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ + + + + + + 0 0 0 0 0 0 0 , 1 2 , 1 1 , 1 1 , , 1 , 2 2 , 2 1 , 1 1 , 1 v v v v v v v v v v u u u u u u u u u K K M O O M M O K
La probabilità cpfw che la durata di un impulso superi una data durata tw è data da:
cpfw(k)=1, k=0 cpfw(k)=
∑
, k=1,2, ... = + ⋅ w j k i j j w g g 1 , , 1è la probabilità che l’intervallo di tempo tra due impulsi superi un dato intervallo di tempo td è data da:
cpfd(k)=1 , k=0 cpfd(k)=
∑
, k=1, 2, ... = + ⋅ u j k i j j v u u 1 , , 11.5
– Compatibilità elettromagnetica
La trasmissione su powerline può essere soggetta a disturbi ma la stessa può creare problemi di interferenza.
Schemi di trasmissione spettralmente efficienti sono estremamente suscettibili alle interferenze e alle dissolvenze in frequenza selettive; richiedono, pertanto, un’alta densità di potenza iniettata che potrebbe creare problemi in coesistenza con i servizi radio primari.
Il problema principale attualmente è quello dell’impatto delle PLC sui ricevitori radio in ambiente locale. Le antenne localizzate nelle vicinanze delle PLC possono raccogliere l’interferenza provocata da quest’ultima con conseguenti notevoli danni.
Sappiamo che le linee di forza di un campo vicino di disturbo si attenuano rapidamente, raggiungendo valori insignificanti, con l’aumento della distanza della linea di potenza.
Nelle aree in cui si schierano le PLC, la sommatoria di tutti i disturbi che esse possono provocare può essere rilevante. La trasmissione dati su powerline è una tecnologia ancora invia di sviluppo; quando le PLC si diffonderanno in maniera massiccia nel mercato delle telecomunicazioni, la presenza delle PLC potrà essere una fonte notevole di disturbi.
Gli studi dell’EMC e gli effetti di campo irradiato dalle linee di potenza possiamo distinguerli tra studi in ambiente locale e studi in ambiente globale.
1.5.1– EMC in ambiente locale.
Per ambiente locale si intende l’area in cui si risentono gli effetti prodotti dalla trasmissione sulla linea di potenza nelle vicinanze di quest’ultima. In questo caso i disturbi generati sono di due tipi. Il primo è quello dei disturbi confinati: sono dovuti al modo principale di propagazione che rimane confinato nello spazio circostante ai conduttori. Il secondo è quello dei disturbi irradiati: sono dovuti ai modi di ordine superiore che si propagano nello spazio circostante.
Il primo tipo di disturbi influenzerà gli apparecchi che utilizzano la rete di potenza come propria alimentazione mentre il secondo tipo influenzerà le lunghe antenne direzionali ad alto guadagno situate in prossimità delle powerline. L’effetto dei campi irradiati dalla linea di potenza è particolarmente avvertito nelle vicinanze delle powerline; l’effetto decresce con andamento di tipo esponenziale all’aumentare della distanza a causa anche delle perdite dovute alla propagazione attraverso il suolo.
Le misure di campo vicino possono essere influenzate fortemente dai piccoli cambiamenti di posizione, dalle frequenze, dal rumore ambientale naturale e dalle emissioni di altri dispositivi elettronici vicini. Nelle misure intervengono anche i radiatori secondari, come ad esempio i tubi dell’acqua.
Le powerlines (PLC, a volte dette PLT per le powerlines di telecomunicazioni) usa cavi di distribuzione a bassa tensione non schermati, a 230 V e frequenza di50 hertz, interni ed esterni alle costruzioni, usati come mezzi di trasmissione con data rates fino a Mb/secondo. Ciò richiede un livello di segnale di iniettati a radiofrequenza (rf) (per esempio, potenza totale < 1 W, potenza spettrale di 40 dBm/Hz, 1-30 MHz) che sono EMC critici, con le correnti di modo comune (CM) sui fili (per esempio, 20 dBµA a 1 megahertz). I segnali simili sono iniettati normalmente ai trasformatori di distribuzione.
Molti standard internazionali sono stati sviluppati per controllare le emissioni irradiate inferiori a 30 MHz nello spettro ad onda corta dell’utente.
La maggior parte degli standard danno le limitazioni di resistenza del campo soltanto superiore a 30 megahertz.
1.5.2– EMC in ambiente globale
Per ambiente globale si intende l’area, abbastanza vasta, in cui si prendono in considerazione gli effetti prodotti da una serie di trasmissioni su powerline. Tale area, circolare, ha un raggio di circa 1000 Km.
E’ importante considerare la componente di campo che si propaga verticalmente e che potrebbe essere fonte di disturbo per le comunicazioni degli aeromobili e in generale per le comunicazioni HF (High Frequency).
Questo perché i segnali nella banda HF possono percorrere grandi distanze e giungere in punti molto distanti dalla superficie terrestre, grazie alla riflessione degli strati della ionosfera e alle basse perdite di cammino prossime a quelle dello spazio libero.
Le prove di corrente a radio frequenza sono più dirette ma hanno il problema delle onde che si levano dalle linee. Gli effetti di campo lontano ed i fattori sottovalutati dell’antenna possono anche condurre il segnale ad onda corta che si rispecchia nella ionosfera.
La parte di campo che si propaga verticalmente, dovuto ad una singola linea di potenza, non può ritornare verso la terra con un’ energia tale da provocare disturbi nelle comunicazioni radio primarie. Se le trasmissioni su powerline avessero larga diffusione, si sommerebbero gli infinitesimi campi prodotti da migliaia di linee di potenza abilitate alla trasmissione.
Attualmente la fonte principale di disturbo che agisce sulle radiocomunicazioni nella banda HF è il rumore delle onde celesti. Questo rumore ha origine principalmente nell’atmosfera ed è dovuto a scariche elettriche che avvengono a circa 1000 Km di distanza dalla terra; è un rumore fortemente variabile in funzione dell’ora del giorno, della stagione in cui ci troviamo e dell’attività solare. L’incremento del rumore delle onde celesti ad opera delle trasmissioni su powerline può provocare danni ai ricevitori HF che operano con ristretti margine di ricezione.
Ci sono i servizi di costa per la navigazione marittima, le stazioni aeronautiche e le stazioni radio militari che sono situate in aree dove il rumore prodotto dall’uomo è sensibilmente inferiore a quello riscontrato nelle città (si fa riferimento al rumore in ambiente periferico).
Queste stazioni comunicano con utenti fissi o mobili che utilizzano per la trasmissione una potenza molto bassa; se ci troviamo in condizioni di cattiva propagazione, un incremento del rumore delle onde celesti potrebbe impedire la corretta ricezione delle trasmissioni radio HF nelle aree remote.
Gli studi EMC effettuati finora sono stati condotti per accertare il potenziale rischio causato da un futuro estensivo sviluppo delle PLC sulle comunicazioni HF; è stato utilizzato un programma di simulazione della propagazione radio ionosferica, la quale prevede la propagazione dei raggi attraverso lo strato assorbente D e gli strati rifrangenti E ed F e stima i valori delle onde celesti per una frequenza precisa, ad una data ora del giorno e alla corrispondente attività solare. Questa simulazione è stata effettuata dall’ASCOM su un territorio di 350.000 Km2 con 125.000 linee di potenza attive.
E’ stato notato che l’effetto sull’incremento del rumore celeste può essere trascurato quando la densità spettrale di potenza emessa per ogni linea è pari a – 40dB/Hz. Questo valore è quello di riferimento quando si vuole assicurare l’assenza di disturbi provocati dalla linea nelle sue immediate vicinanze.
Questo implica che se si riesce a dimensionare i parametri relativi alla linea elettrica in modo tale da garantire l’assenza dei disturbi prossimi alla linea, si è sicuri di ottenere l’immunità dai disturbi in ambiente globale.
1.6
– Mancanza di un protocollo standard
La tecnologia di comunicazione su powerline è ancora in fase di sviluppo, per questo motivo non sono ancora state definite le caratteristiche di banda, di impedenza, il livello di rumore, un unico protocollo di comunicazione.
Questo problema viene affrontato nell’European Economic Commission’s Committee for Electrotechnical Standardisation (CENELEC) standard EN50065. Questo standard fornisce le caratteristiche base per la trasmissione e la ricezione nelle linee di distribuzione a bassa tensione, in un banda di frequenza compresa tra i 3 KHz e i 148,5 KHz. Dobbiamo distinguere la banda i due parti: la banda compresa tra i 3 KHz e i 95 KHz è riservata alla comunicazione con gli utenti (riservata ad esempio per la lettura dei contatori o per il controllo del carico); la banda, invece, tra i 95 KHz e i 148,5 KHz è riservata alle trasmissioni tra i consumatori.
Lo standard EN50065 stabilisce anche le caratteristiche relative alle comunicazioni su powerline, e cioè la variazione dell’impedenza, i segnali di disturbo e l’immunità ai disturbi, i sistemi e protocolli di modulazione.
Per quel che riguarda i protocolli di comunicazione, di quest’ultimi ne esistono diversi; il più utilizzato sia per applicazioni nel ramo della demotica che nelle aziende, è il cosiddetto protocollo X-10.
• X-10 definisce un vero e proprio sistema di comunicazione su powerline utilizzato negli USA per applicazioni di automazione domestica. E’ basato su un protocollo relativamente semplice e su un set di comandi che abilitano semplici funzioni, ad esempio accensione e spegnimento delle luci, il controllo della temperatura etc. X-10 è basato su un sistema on-off keying (OOK) che utilizza una singola portante a 120 KHz.
• CEBus (Consumer Electronic Bus) è uno standard aperto per i sistemi di automazione domestica definito dall’EIA (Electronic Industries Association). Nonostante sia stato creato per essere utilizzato nell’automazione domestica, include un protocollo completo e sofisticato tanto che viene utilizzato sia sulle powerline che su altri supporti trasmessivi con prestazioni paragonabili a quelle delle PLC.
I dispositivi sul mercato che supportano lo standard CEBus sono costruiti dalla Intellon che produce un modem a spettro espanso; questo dispositivo però non rispetta i requisiti CENELEC nella banda destinata alle trasmissioni tra i consumatori.
• “Lon Talk” è un protocollo proprietario,conforme alle specifiche CENELEC, standardizzato dalla Echelon. Le soluzioni sulle powerline proposte dalla Echelon prevedono l’utilizzo di modem che utilizzano una portante alla frequenza di 132,5 KHz e una modulazione BPSK (Binary Phase Shift Keying).
1.7
– Conclusioni
I risultati delle varie misurazioni effettuate dall’ENEL e da altre aziende ci offrono un quadro generale sui problemi che si possono incontrare nella realizzazione e nell’utilizzo di un sistema di trasmissione ad onde convogliate. Dall’analisi dell’ambiente in cui si deve realizzare la rete di comunicazione, a priori si può fare una stima del tipo e dell’entità del disturbo col quale il sistema dovrà coesistere.