Capitolo 5
5.1 Studio del caso reale
Verificato tramite la simulazione il funzionamento del metodo di ricostruzione k-t BLAST, mosk-trak-ta nel capik-tolo precedenk-te, andiamo ad applicare k-tale algorik-tmo ad un caso reale.
Sono stati adoperati, per il nostri scopi, dei file DICOM forniti dalla macchina per la Risonanza Magnetica (General Electric (GE), Signa CVI, 1.5 Tesla) presente nel laboratorio di RM dell’Istituto di Fisiologia Clinica del CNR di Pisa, essi sono stati elaborati con il software AFNI per ottenere le immagini finali, che sono il punto di partenza del nostro algoritmo. In realtà il metodo di ricostruzione studiato prevede che il punto di partenza sia il k-spazio e non l’immagine ma, data l’impossibilità di inserire all’interno della macchina il software che esegue l’algoritmo di ricostruzione studiato, il metodo è stato testato ricavando il k-spazio di partenza dall’immagine fornita dalla macchina. I dati sono stati acquisiti usando una sequenza Gradient-echo EPI (Echo Planar Imaging), con tempo di ripetizione (Tr) di 3 sec, un tempo di echo (TE) di 40 ms, FOV di 24 cm, flip angle di 90°, spessore della fetta 5 mm per un totale di 8 fette cerebrali, risoluzione 64x64 ( dimensione voxel 3.75x3.75 mm² ). In tutto sono stati acquisiti 60 time frame per ogni fetta, le dimensioni totali della nostra matrice saranno 64x64x8x60 (rispettivamente x, y, z, istanti temporali).
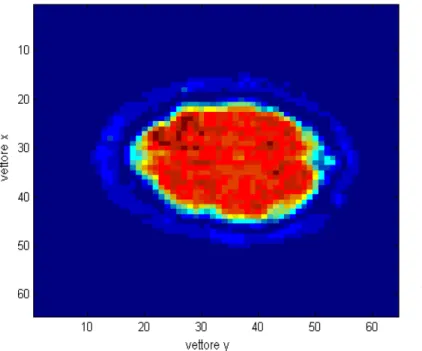
Il metodo è stato applicato, per semplicità, ad un’unica fetta, ovvero la numero 5, Figura 1 mostra tale fetta prelevata all’istante temporale 30. Per avere tutte le fette ricostruite basta reiterare il procedimento.
A questo punto ci troviamo ad analizzare una matrice 64x64x60 che costituisce la serie di immagini nel tempo. Come già specificato, il metodo andrà a
Figura 1: Fetta cerebrale 5,
prelevata all’istante temporale 30. A questa verrà applicato l’algoritmo di ricostruzione per tutti gli istanti temporali.
Il primo passo è stato applicare la trasformata inversa di Fourier a questa matrice per estrapolare lo spazio k-t, e partendo da questo abbiamo applicato l’algoritmo di ricostruzione k-t BLAST trovato con la simulazione. Abbiamo quindi esaminato i diversi casi di accelerazione visti.
In questo caso il problema principale è stata la valutazione della varianza del rumore, infatti, come già accennato nel capitolo precedente, non abbiamo nessuna informazione sull’entità del rumore presente ed è necessario ricavare tale parametro dai pixel di background in modo più preciso possibile. Per fare ciò è stata calcolata un’immagine media sulle 60 repliche temporali, questa è stata sottratta ad ognuna per poi selezionare una zona centrale 6x6x60, per ognuno dei voxel compresi in tale intervallo è stata calcolata la varianza nel tempo e poi mediata. Tale varianza rimarrà la stessa per ciascun fattore di accelerazione utilizzato, poiché essa non dipende dal sottocampionamento. Con questo procedimento si è ottenuta una varianza del rumore pari a 107.78. Andiamo adesso a verificare cosa succede per le diverse accelerazioni studiate nel caso simulato.
5.1.1 Accelerazione 2x
Andiamo ad esaminare cosa succede per fattore di accelerazione pari a 2, ovvero utilizzando un sottocampionamento che prelevi un campione ogni due istanti di tempo. La simulazione ha dato buoni risultati per questa accelerazione, che ci permetterebbe di acquisire una fetta in 50 ms invece che in 100 ms, tempo impiegato con i metodi oggi usati.
Tabella 1 riporta i valori dell’errore totale Etot, calcolato come visto nell’eq. 1 Capitolo 4, pag. 50 (in questo caso N=64 e M=60), per diversi valori della varianza del rumore, ed i valori dell’errore di ricostruzione Err, calcolato come nell’eq. 2, Capitolo 4, pag. 51, ma adesso solo su un singolo voxel appartenente alla zona attiva, più precisamente il voxel di coordinate x=40, y=36. Questo per rendere più precisa l’analisi. L’andamento di tali errori ci dirà quanto è precisa la varianza del rumore trovata ed inserita nella formula finale di ricostruzione.
Il rapporto segnale rumore SNR è, in tutti i casi, pari a 16.3756 infatti non andiamo a variare il rumore, che è sempre lo stesso, ma stimiamo la sua varianza per diversi casi.
In particolare abbiamo visto cosa succede se si sottostima la varianza (VAR=107.78) rispettivamente del 90%, 70%, 50%, 30%.
Tabella 1: Errore totale (Etot) ed errore sul voxel (Err) per diversi valori della stima della
varianza del rumore nel caso di fattore di accelerazione pari a 2.
Si noti che tali errori sembrano molto alti rispetto a quelli trovati nel caso simulato, ma bisogna tenere presente che adesso l’intensità media dell’immagine è pari a I=107.2133 ( nel caso simulato era 63.7107) quindi
100% 90% 70% 50% 30%
Etot 39.0424 38.0036 36.23892 34.1554 35.3152
Partendo dal valore originale, ci siamo chiesti se tale varianza fosse abbastanza precisa, anche se nel caso di accelerazione 2x, come abbiamo visto, si ha un buon margine di errore nella stima.
Immaginando tale varianza del rumore come una sovrastima, abbiamo provato a diminuirla inserendo all’interno della formula finale dell’algoritmo di ricostruzione il 90% del valore iniziale trovato. In questo caso il valore di entrambi gli errori è diminuito e gli standard studiati nella simulazione confermano l’ipotesi iniziale. Per determinare l’entità di tale sovrastima abbiamo proceduto in questo senso fino a che, per una stima del 30%, entrambi gli errori sono aumentati. Questo ci dice che, per tale valore della varianza, si è manifestata una sottostima, dunque il valore corretto da inserire nell’algoritmo di ricostruzione si trova nell’intervallo tra il 50% e il 30%.
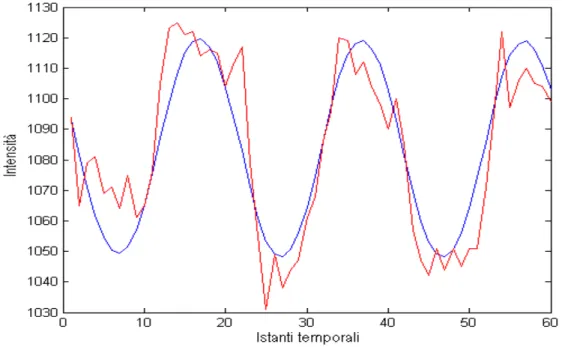
Figura 2 mostra l’andamento nel tempo del voxel di coordinate x=40, y=36 ricostruito (curva blu), confrontato con l’originale (curva rossa) nel caso di fattore di accelerazione 2, per una varianza del rumore pari a VAR*50%, in pratica nel caso migliore.
Figura 2: Andamento intensità nel tempo di un voxel ricostruito della zona attiva (curva blu) e
Come si può notare, l’attivazione è lenta e ci riporta al caso simulato con parametri del paradigma pari a T0=42, t_on=21, che abbiamo visto essere la combinazione migliore.
Figura 2 mostra una periodicità perfettamente ricostruita, e la ricostruzione non presenta spike di intensità, indice di un buon filtraggio in fase di training, e dunque una matrice di covarianza Mx2, f che risolve in parte il rumore.
In questo caso si sono utilizzate 15 linee centrali del k_spazio per determinare la matrice di covarianza e dunque il filtro passa basso. Verifichiamo cosa succede se preleviamo 21 linee centrali del k-spazio per costruire il nostro filtro e ricalcoliamo gli errori Etot ed Err.
Con questa nuova banda passante, del filtro passa basso, si ottiene Etot=34.0537 ed Err=138.9267, che sono entrambi più bassi rispetto a quelli calcolati utilizzando 15 linee centrali del k-spazio. Questo sembra un’incongruenza paragonata ai risultati ottenuti con la simulazione, ma bisogna tenere presente che il k-spazio con essa ottenuto può non essere perfettamente uguale a quello reale, ed è possibile che, in questo caso, selezionare solamente 15 linee non sia sufficiente ad acquisire le informazioni necessarie sulla distribuzione del segnale. Quindi, quando abbiamo a che fare con immagini reali, il filtro passa basso deve essere ricavato selezionando non meno di 19 e non più di 21 linee centrali. A dimostrazione di questo andiamo nuovamente a calcolare gli errori selezionando 25 linee centrali. I risultati sono, Etot=37.4287 ed Err=172.2955 dunque si riscontra un aumento di entrambi gli errori. Questo ci conferma quanto trovato con la simulazione, una volta definita l’estensione giusta della banda passante del filtro, se la aumentiamo avviene quanto già visto, ovvero un aumento dell’ampiezza degli elementi della matrice che lo compone, e quindi, a seguito della moltiplicazione presente all’interno della formula finale dell’algoritmo di ricostruzione, una amplificazione del rumore invece di una risoluzione.
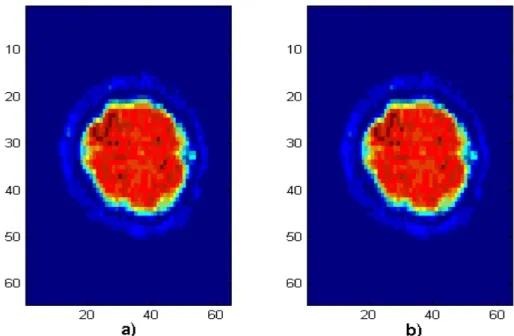
Per completezza Figura 3 mostra come viene ricostruita la fetta selezionata in partenza a dimostrazione della buona riuscita del metodo di ricostruzione
Come si può vedere le due immagini, che rappresentano la fetta numero 5 selezionata all’istante temporale pari a 30, utilizzando 21 linee centrali per il filtro passa basso, sono molto simili.
Figura 3: a) Immagine ricostruita tramite il metodo k-t BLAST, b) Immagine originale.
5.1.2 Accelerazione 4x
Come visto nel caso simulato, tale ricostruzione risulterà peggiore rispetto al caso di fattore di accelerazione pari a 2, per i motivi già esaminati nel capitolo precedente, ma, ad ogni modo, accettabile. In questo caso sarebbe possibile acquisire una fetta in 25 ms, andando così a diminuire il normale tempo di acquisizione (pari a 100 ms) di quattro volte.
Andiamo nuovamente a valutare l’errore totale e l’errore sul voxel per una varianza del rumore pari a 107.78, Tabella 2 mostra i risultati ottenuti.
Il rapporto segnale rumore è sempre pari a SNR=16.3756, ed il filtro è stato ottenuto selezionando 15 linee centrali del k-spazio.
100% 120% 150% 200% 250% 300% 400% Etot 111.3708 90.8099 70.7868 57.9224 52.9642 50.9540 51.9772
Err 1363.0103 992.6201 620.9327 381.3179 296.9644 272.2199 284.8286
Tabella 2: Errore totale (Etot) ed errore sul voxel (Err) per diversi valori della stima della
varianza del rumore nel caso di fattore di accelerazione pari a 4.
Supponendo che il valore iniziale trovato per la varianza del rumore sia una sottostima (dato l’alto valore dell’errore Err), abbiamo proceduto aumentando tale parametro per verificare questa ipotesi. I risultati hanno confermato quanto detto, infatti entrambi gli errori diminuiscono notevolmente aumentando solo del 20% la stima. Procedendo in questo senso, e quindi aumentando sempre di più la stima, si è notata una progressiva diminuzione degli errori fino a quando, per una varianza quattro volte superiore a quella iniziale, si è riscontrato un loro leggero aumento.
Quindi si può dire che, inserendo nella formula finale dell’algoritmo di ricostruzione, un valore della varianza del rumore tre volte superiore a quella trovata inizialmente, che abbiamo scoperto essere una sottostima, si ottiene una ricostruzione accettabile.
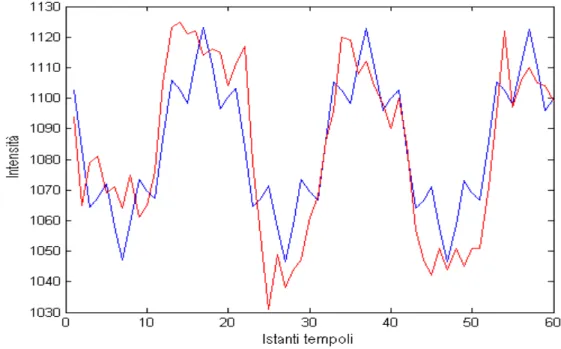
Figura 4 mostra l’andamento del voxel attivato di coordinate x=40, y=36 originale (curva rossa) confrontato con l’andamento dello stesso voxel ma ricostruito (curva blu), per un filtro di training ricavato da 15 linee centrali del k-spazio. A differenza del caso con fattore di accelerazione 2x, nell’onda che rappresenta l’andamento ricostruito dell’attivazione, sono visibili delle variazioni di intensità in prossimità delle curve concave e convesse.
Questo, probabilmente, è dovuto principalmente a due fattori, per prima cosa bisogna tenere presente che adesso abbiamo un aliasing più impegnativo da risolvere, e dunque anche una componente rumorosa più alta poiché, come già specificato nel paragrafo 4.3.2, c’è una sovrapposizione di quattro anche del rumore; secondo, quanto riportato in Figura è il risultato di un filtraggio non ottimale, come visto nel paragrafo precedente, Figura 5 riporta l’attivazione
Figura 4: Andamento intensità nel tempo di un voxel ricostruito della zona attiva (curva blu) e
dello stesso pixel originale (curva rossa), per fattore di accelerazione pari a 4, filtro passa basso ottenuto selezionando 15 linee centrali del k-spazio.
.
Figura 5: Andamento intensità nel tempo di un voxel ricostruito della zona attiva (curva blu) e
dello stesso pixel originale (curva rossa), per fattore di accelerazione pari a 4, filtro passa basso ottenuto selezionando 21 linee centrali del k-spazio.
Andando a valutare gli errori commessi nel caso mostrato in Figura 5 si hanno i seguenti risultati, Etot=48.4016 ed Err=184.7349, che sono entrambi più bassi rispetto a quelli trovati nel caso di Figura 4, ad ulteriore conferma di quanto scoperto per l’accelerazione 2x.
Anche in questo caso vediamo cosa succede se inserisco un filtro derivante dall’acquisizione di 25 linee centrali del k-spazio, gli errori sono Etot=56.3986 ed Err=267.4256, e sono entrambi maggiori rispetto a quelli nel caso di 21 linee.
In quest’ultima eventualità (25 linee selezionate) probabilmente si commette l’errore di prelevare più del necessario, e quindi includere nella banda passante del filtro delle frequenze che contengono più rumore che segnale, bastano 21 linee per ottenere le informazioni necessarie sulla distribuzione del segnale. Si può concludere che applicare il metodo k-t BLAST per ottenere un fattore di accelerazione pari a 4, dà buoni risultati a due condizioni, la prima è avere una buona stima della varianza del rumore, parametro che viene inserito nella formula finale dell’algoritmo di ricostruzione, la seconda è ottenere una buona precisione dei dati di training, attraverso un filtraggio passa basso che selezioni solo le componenti frequenziali che effettivamente contengano le informazioni sulla distribuzione del segnale.
Per quanto riguarda la ricostruzione con fattore di accelerazione pari a 6, tutti i tentativi fatti per ottenere delle ricostruzioni soddisfacenti non hanno dato risultati accettabili.