CAPITOLO 5
ANALISI DEL COMPORTAMENTO IN AREA URBANA
DI GRUPPI DI CONDUCENTI CLASSIFICATI SOTTO
IL PROFILO PSICOLOGICO
5.1 INTRODUZIONE
I dati statistici nazionali evidenziano che in Italia l’ambiente urbano è il luogo dove si verifica il maggior numero di incidenti stradali. Nel 2008 sulle strade urbane si sono verificati 168.088 incidenti (76,8% del totale) che hanno causato 228.325 feriti (pari al 73,5% sul totale) e 2.076 morti (pari al 43,9%). Di questi una elevata percentuale ha coinvolto pedoni, per un totale di 648 morti e 20.640 feriti. La pericolosità delle strade urbane è legata soprattutto alla promiscuità delle componenti di traffico e alla maggiore complessità degli scenari che determinano pertanto comportamenti maggiormente a rischio sia da parte dei conducenti dei veicoli sia delle utenze deboli. Queste ultime in particolare risultano le più lente a spostarsi per cui vengono considerate come la categoria meno protetta fisicamente e, pertanto, con il maggior grado di vulnerabilità.
Per quel che concerne l’analisi delle circostanze accertate o presunte di incidente si osserva che, nell’ambito dei comportamenti di guida non corretti, il mancato rispetto delle regole di precedenza, la guida distratta e la velocità troppo elevata sono le prime tre cause di incidente (fatta eccezione per le cause di natura imprecisata) e costituiscono da sole il 40-45% dei casi. Lo stato psico-fisico alterato del conducente, pur non rappresentando una percentuale elevata del totale dei casi (2,51%), va segnalato per la gravità degli eventi; le principali cause degli incidenti che rientrano in tale categoria sono: l’ebbrezza da alcool (3.833 casi, pari al 72% della categoria), il malore, l’assunzione di sostanze stupefacenti o psicotrope ed il sonno che, complessivamente con 1480 casi, pesano per il restante 28%. Soltanto in 541 casi, che
incidenti. Il comportamento scorretto del pedone si rileva in 8448 casi e pesa per il 4% sul totale delle cause di incidente. Il 69,8% dei morti e il 69,2% dei feriti a seguito di incidente stradale è costituito dai conducenti dei veicoli coinvolti; i passeggeri trasportati rappresentano il 16,5% dei morti e il 24,1% dei feriti mentre i pedoni risultano essere il 6,6% dei feriti e ben il 13,7% dei morti.
Tra i conducenti morti a seguito di incidente stradale i più colpiti sono i giovani. La fascia di età che presenta il valore massimo è quella tra 25 e 29 anni (370 morti in valore assoluto), mentre nei conducenti feriti la frequenza più elevata si colloca in corrispondenza della fascia di età tra 30 e 34 anni (27.117). A partire dai 35 anni di età il numero di conducenti che hanno riportato conseguenze in incidente stradale inizia progressivamente a decrescere in valore assoluto all’aumentare dell’età.
I dati statistici sopra riportati entrano in contrasto con i miglioramenti evidenziati dallo studio delle tendenze dell’ultimo quinquennio in quanto si evidenzia come tale miglioramento globale non abbia investito tutte le tipologie di utenti della strada: gran parte degli utenti deboli (pedoni, ciclisti, conducenti di ciclomotori e motocicli) e di quelli a rischio (giovani ed anziani) infatti, sono rimasti ai margini di questo miglioramento, con riduzioni di vittime minime e casi di stabilità o di crescita. A causa di questa evoluzione bassa o regressiva l’Italia sta accumulando un ritardo in questo settore rispetto agli altri Stati membri dell’UE, presentandosi come uno dei Paesi europei con il maggior numero di morti per incidenti stradali legati alle categorie suddette. Le misure di sicurezza adottate, salvo rare eccezioni, sono state poco attente (o se attente poco efficaci) alle esigenze e alle problematiche della sicurezza stradale in area urbana: questa scarsa sensibilità per il problema urbano è comunque strettamente legata ad un quadro di sicurezza stradale urbana storicamente carente che relega il Paese agli ultimi posti in relazione ai tassi di mortalità. Inoltre se si va a considerare l’evoluzione nel lungo periodo dei costi sociali delle vittime in area urbana si evidenzia una crescita del 28% (rispetto alla riduzione del 20% dei costi sociali delle vittime in aree extraurbane) che segna una regressione e un deterioramento complessivo dei livelli di sicurezza.
Le cause di questa situazione vanno ricercate non soltanto nell’azione irresponsabile dei conducenti e dei pedoni ma anche nella disordinata dislocazione delle funzioni urbane, nella mancata pianificazione dei percorsi e nella carenza funzionale e strutturale dell’infrastruttura stradale che va ad influire, e non poco, sui comportamenti di guida, sulla
leggibilità dello spazio stradale, sulla percezione delle aree di conflitto (intersezioni, attraversamenti pedonali, altri punti singolari).
L’obiettivo di questo studio sperimentale è di individuare un modello di comportamento dell’utente in ambito urbano, sulla base del quale sia possibile prevedere i valori dei parametri cinematici (velocità operative e accelerazioni) di diverse categorie di utenti da utilizzare per la definizione delle distanze di visibilità da garantire in ambito urbano e di alcune raccomandazioni per la progettazione delle zone di conflitto tese a migliorarne le condizioni di sicurezza. Per raggiungere tale obiettivo, si è cercato di approfondire l’analisi dei processi cognitivi e comportamentali degli utenti e, sulla base delle evidenze sperimentali, di individuare alcune situazioni di maggiore criticità che devono essere rimosse o modificate per evitare comportamenti di guida pericolosi.
5.2 BACKGROUND
5.2.1 Fattori umani
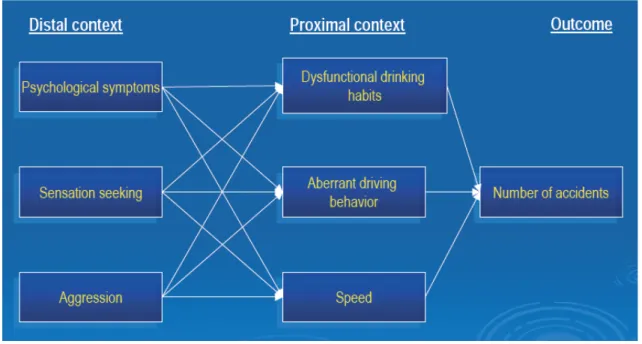
Il comportamento dell’utente, nella maggioranza dei casi, svolge un ruolo fondamentale nel verificarsi di un incidente [1] (Figura 1). In particolare, si pensa che alcuni tratti della personalità condizionino fortemente i comportamenti di guida dell’utente: impulsività, aggressività e “Sensation Seeking” sono indicati come i principali fattori che possono influire nella predisposizione dell’utente ad adottare comportamenti che accrescono il rischio di incidenti stradali (alta velocità, violazione del codice della strada, eccessiva assunzione di bevande alcoliche).
Anche se i dati disponibili sono ancora poco numerosi, alcuni studi recenti fanno ipotizzare che il tratto della personalità umana denominato Sensation Seeking sia geneticamente determinato e abbia una base biologica [2]. Gli stessi fattori della personalità (impulsività, ricerca di sensazioni nuove) sembrano essere correlati al profilo circadiano dei soggetti anche se le relazioni tra variabili psicologiche e cronobiologiche non sono state ancora estesamente approfondite.
L’analisi della letteratura in materia di psicologia del traffico evidenzia la convergenza di alcuni risultati raggiunti da diversi studi internazionali basati sulla somministrazione di test autocompilativi [3] [4]; in particolare, si osserva che:
- i soggetti più estroversi ma meno responsabili e cooperativi commettono più frequentemente infrazioni volontarie del codice stradale, mentre i soggetti emotivamente stabili commettono meno errori alla guida;
- i soggetti più disinibiti sono maggiormente predisposti ad adottare volontariamente comportamenti di guida pericolosi per la sicurezza stradale;
- i soggetti di sesso maschile hanno una maggiore inclinazione ad affrontare situazioni rischiose, fattore che può influenzare l’adozione volontaria di comportamenti aberranti alla guida;
- gli errori involontari alla guida sono più frequenti negli individui di sesso femminile.
Figura 1: Relazioni Personalità-Stile di guida (Ripreso da: Sümer, Accident Analysis Prevention, 2003)
5.2.2 Velocità
La velocità non solo incide sulla gravità di un incidente, ma è anche strettamente legata al rischio di essere coinvolti in un incidente [5]. Molti studi sono stati condotti al fine di esaminare i valori di velocità assoluta o media da considerare sia ai fini del calcolo delle distanze di visibilità [6] sia con riguardo ai tassi di incidentalità [7]. Tali studi, pur avendo individuato gli effetti dal punto di vista qualitativo, mostrano però una conoscenza ancora insufficiente per consentire una quantificazione specifica; allo stesso tempo consigliano di tener conto in maniera consapevole della influenza dei fattori esterni sui rapporti tra
velocità, percezione e tassi di incidentalità, e di essere espliciti e dettagliati sulle circostanze esterne a cui i risultati si riferiscono.
5.2.3 Accelerazione/Decelerazione
Per il calcolo delle distanze di visibilità da garantire in corrispondenza dei punti nodali del tracciato, quali intersezioni regolate con segnale di precedenza, segnali semaforici,
attraversamenti pedonali, si fa riferimento a specifici valori di accelerazione/decelerazione riportati in letteratura.
Con riferimento ai rami di approccio alle rotatorie [8], la ISD viene definita in funzione della velocità di approccio all’intersezione, di un tempo di percezione e reazione fissato in 2,5 sec ed assumendo che i veicoli in approccio riducano la velocità con una decelerazione consigliata di -3,4 m/s2 [9]; quest’ultimo valore viene definito come “comodo” e tale da non comportare perdite di controllo del veicolo in condizioni di pavimentazione bagnata. Per quel che concerne la Normativa Italiana vigente, i valori di accelerazione ivi previsti risultano essere inferiori e compresi tra -2,0 e -2,5 m/s2: tali valori sono considerati sicuri e più confortevoli nonché validi per qualsiasi tipologia di intersezione.
Per quanto concerne gli attraversamenti pedonali rialzati, essi devono essere visibili ad una distanza tale da consentire all’utente di apprezzare la presenza dell’ostacolo e di eventuali utenti prossimi ad attraversare e decidere quindi di effettuare la manovra di frenatura. Le linee guida AASHTO, con riferimento alla “yield-sign approaches”, affermano che una riduzione del 60% della velocità dei veicoli in avvicinamento è sufficiente a garantire l’arresto o l’attraversamento in sicurezza [9][10].
5.3 METODOLOGIA DELLO STUDIO
Lo studio sperimentale è consistito nella esecuzione di test di guida in ambiente virtuale presso il Dipartimento di Ingegneria Meccanica, Nucleare e della Produzione dell’università di Pisa, da parte dello stesso campione di drivers che ha partecipato alla prima fase di calibrazione del sistema, in modo da non dover ripetere le procedure di training. Questo campione è inoltre rappresentativo di una fascia di driving population compresa tra i 18 ed i 35 anni, di sesso sia maschile che femminile, che risulta essere quella più coinvolta in incidenti stradali con morti o feriti; non sono state registrate informazioni circa la “driving history” dei partecipanti, come il coinvolgimento in incidenti
o le violazioni al codice della strada commesse, ma si è considerato come unico requisito il possesso di una patente di guida europea valida. I soggetti sono stati selezionati tra i residenti della città di Pisa, con origine, estrazione sociale e formazione culturale differente.
5.3.1 Caratterizzazione psicologica dei drivers
I volontari che hanno eseguito il test di guida sono stati classificati dal punto di vista psicologico, ricorrendo alla somministrazione di due test riportati in letteratura, denominati “Sensation Seeking Scale - Form V” e “Driver Behaviour Questionnaire”, e rappresentativi rispettivamente del profilo di personalità e dello stile di guida degli utenti. Una descrizione delle due scale è riportata in appendice alla presente Tesi.
5.3.2 Descrizione del contesto urbano
La sperimentazione è stata condotta ricorrendo alla ricostruzione virtuale dell’area urbana di Rosignano Solvay, all’interno del Comune di Rosignano Marittimo, già utilizzata per la fase preliminare di calibrazione e opportunamente selezionata per la varietà di scenari più o meno complessi, utili per differenziare i comportamenti degli utenti alla guida.
Il percorso, infatti, presenta una lunghezza di ca. 3,5 km e prevede tratti a senso unico, tratti a doppio senso di marcia con carreggiata molto larga, alternati ad altri in cui la dimensione della sezione stradale è minima, n°2 intersezioni semaforizzate, n° 3 rotatorie e n° 3 attraversamenti pedonali rialzati (Figura 2).
Esaminando nel dettaglio il percorso ed in particolare le zone di conflitto si osserva quanto segue:
- il primo dei due semafori presenta ostruzioni visive mentre il secondo può essere visto in maniera netta e distinta sin dall’uscita della rotatoria precedente;
- la prima rotatoria presenta un ingresso in curva che non è facilmente percepibile lungo il ramo di approccio; la seconda rotatoria è composta da elementi geometrici che soddisfano i comuni requisiti di buona progettazione; infine la terza rotatoria non prevede alcun tipo di deflessione in approccio, presenta caratteristiche geometriche ridotte e scarsa visibilità dell’ingresso precedente (a sinistra nell’anello);
- gli attraversamenti pedonali rialzati sono ubicati su tratti in rettifilo; i primi due sono ubicati in posizioni intermedie rispetto ad altri dissuasori di velocità mentre il terzo risulta più isolato.
Figura 2: Percorso individuate e relative caratteristiche geometriche
Tabella 1: Caratteristiche geometriche delle sezioni omogenee
1 2 4 5 6 7 8 500,00 320,00 440,00 325,00 325,00 475,00 430,00 8,00-4,75 8,00 7,40 7,00-6,60 12,60 12,60 8,60-7,60 2--1 2 2 2 3 3--2 2 4,00-2,75 4,00 3,70 3,50-3,30 3,20 3,20-4,80 4,30-3,80 0 0 1/180 1/500 0 0 0 30 50 50 50 50 50 50 0-1% 0-1% -1,50% 0,00 0,00 0,00 0,00 n n n n n n 4,70-5,00 1,10-1,50 1,40 1,50-2,00 2,10 3,50 3,00 n 1,10-1,50 1,10-1,20 1,40-1,50 1,40 3,10 3,20 n n n n n 1,50-1,50 1,50-1,50 n n= not present Lane width (m) Curvature (m) Posted Speed Limit (km/h)
HOMOGENEOUS SECTIONS
Lenght (m) Roadway Width (m)
Number of Lanes
Sidewalk left width (m) Bicycle path width (m)
Slope (%) Side Parking width (m) Sidewalk right width (m)
Ai fini del presente studio l’intero percorso è stato suddiviso, come per la procedura di calibrazione, in 8 sezioni omogenee, le cui principali caratteristiche geometriche della carreggiata e degli elementi marginali sono riportate in Tabella 1.
Ai fini dell’analisi non è stata presa in considerazione la sezione omogenea n°3 in virtù della sua estensione ridotta e a causa di una eccessiva dispersione dei dati legata alla presenza del semaforo.
La sperimentazione è stata condotta riproducendo le condizioni di acquisizione in ambito reale, vale a dire con scarso traffico e lasciando che i drivers viaggiassero alla velocità desiderata, tenendo ovviamente conto dei limiti di velocità e del rispetto delle traiettorie. Per tenere conto della non abitudinarietà degli utenti con il sistema di simulazione è stato eseguito, per ogni soggetto testato, un periodo di training della durata di 10 minuti.
5.4 ANALISI DEI DATI SPERIMENTALI
5.4.1 Profili di rischio
I dati relativi ai profili di rischio individuati mediante i questionari, sono stati analizzati con la tecnica dei clusters (cluster analysis). Come noto, questa tecnica, partendo da un collettivo multidimensionale, mira ad assegnare ciascun soggetto a categorie non definite a priori, formando dei gruppi di osservazione omogenei al loro interno ed eterogenei tra loro. La individuazione delle caratteristiche distintive di ciascun gruppo all’interno della popolazione, e quindi la ricerca delle classi omogenee dentro le quali si può supporre che i soggetti siano mutuamente surrogabili, è stata eseguita utilizzando, per ciascuno dei suddetti test psicologici, i quattro fattori principali che li caratterizzano. Prima di procedere alla costruzione della matrice di dissomiglianza, è stata eseguita una opportuna standardizzazione delle scale di punteggi attribuiti a ciascun fattore principale, in modo da evitare che le variabili con intervalli di variazione più ampi esercitino un peso maggiore nella misura della dissomiglianza; la matrice è stata quindi costruita calcolando la distanza euclidea (euclidean distance), nello spazio ℜ dei fattori principali, tra i punteggi 8
normalizzati di ciascun soggetto. Tra le tecniche gerarchiche scissorie presenti in letteratura si è deciso di procedere alla suddivisione del gruppo di dati originario attraverso il metodo “Partitioning Around Medoids” (PAM - Kaufman and Rousseeuw, 1990) derivato dal più noto metodo “K-means”. L'algoritmo di PAM si basa sulla ricerca di oggetti rappresentativi, definiti “medoids”, tra le osservazioni del dataset. Dopo aver
trovato un set di k medoids, vengono costruiti k clusters assegnando ogni osservazione al più vicino medoid. Attraverso un processo iterativo, ad ogni passo vengono individuati nuovamente k medoids e vengono costruiti k clusters con la stessa procedura. The goal is to find k representative objects, where k is the selected number of clusters, which minimize the sum of the dissimilarities of the observations to their closest representative object. PAM method is more robust than k-means method because it minimizes a sum of dissimilarities instead of a sum of squared euclidean distances; moreover, it provides a novel graphical display, the silhouette plot, che consente in maniera diretta di stabilire il grado di dissomiglianza degli elementi appartenenti ad un gruppo e quindi la bontà della suddivisione all’i-esimo step. L’analisi condotta sui punteggi registrati nel questionario ha portato ad una classificazione dei soggetti in tre clusters, rappresentati graficamente nella Figura 3a. In particolare, osservando i singoli punteggi attribuiti a ciascun fattore principale, i valori medi e le deviazioni standard degli stessi relativi ad ogni cluster e riportando i valori alla loro scala originaria, sono stati definiti dei limiti di punteggio per ciascun test e le combinazioni a coppie dei suddetti limiti che consentono di definire un particolare profilo di rischio; tali coppie rappresentano una scala quantitativa di riferimento rispetto alla quale sarà possibile classificare gli utenti.
I clusters così individuati sono i seguenti:
- low risk: rappresentativo di quei soggetti poco propensi a comportamenti rischiosi, attenti alla guida e poco aggressivi, tendenti a violare il codice della strada in seguito prevalentemente ad errori involontari, composto da 28 soggetti – (SSS-V<14 ;
DBQ<19)
- medium risk: è il gruppo nel quale ci sono tutti quegli utenti che, dal punto di vista della personalità, presentano un comportamento leggermente più esibizionista rispetto ai soggetti del precedente cluster, che si traduce in un atteggiamento al volante più aggressivo e ad un aumento delle violazioni consapevoli delle norme di circolazione, composto da 32 soggetti (14≤SSS-V≤ 23; 19≤DBQ≤30);
- high risk: raggruppa tutti quei soggetti che sotto il profilo della personalità si ritengono più disinibiti e propensi ad atteggiamenti a rischio, tendendo così ad assumere comportamenti aberranti alla guida dei veicoli, composto da 35 soggetti (SSS-V >23 ;
Le coppie di punteggi che non soddisfano entrambi i limiti sopra riportati sono rappresentative di soggetti che si trovano in zone di “confine” tra due cluster nello spazio
8
ℜ : in questo caso, anche sulla base dei risultati ottenuti nei test sperimentali, si può utilizzare come parametro discriminante l’esito del test DBQ.
In figura 2 sono rappresentati i valori di silhouette di ciascun cluster e quello medio relativo ai 3 clusters individuati, che risulta pari a 0,255. È stato inoltre verificato che la classificazione così eseguita presenta i più alti valori di silhouette rispetto ad altre possibili classificazioni di interesse (n=4 e n=5). a) Histogram of S S Fr eq uenc y 0.15 0.20 0.25 0.30 0 1 02 03 04 0 s85 = 0,245 b)
Figura 3: Valori di silhouette: a)campione di drivers; b)densità di frequenza relativa alla simulazione Montecarlo
Per verificare che il campione analizzato risulti essere completamente casuale, è stata eseguita una simulazione col metodo Montecarlo, consistente nella generazione casuale di n°1000 matrici [8x95] contenenti i valori dei punteggi assegnati ai fattori principali esaminati. Ognuna di queste matrici è stata classificata in 3 clusters ed è stato calcolato il valore medio della silhouette s_ dei 3 clusters ottenuti; per l’insieme dei valori di
_
s è stata
quindi costruita la relativa funzione di densità di probabilità (Figura 3b).
Si osserva che l’85th percentile della distribuzione dei valori medi delle silhouette tende ad attestarsi intorno al valore s85=0,245; il valore della silhouette determinato attraverso la
clusterizzazione dei punteggi ottenuti dal test psicologico risulta essere maggiore dell’85%-le dei valori medi di silhouette dell’insieme delle matrici estratte, per cui la classificazione eseguita può ritenersi attendibile, con un’affidabilità dell’85%, ed il campione esaminato può considerarsi completamente random e, dunque, rappresentativo dell’intera popolazione.
5.4.2 Analisi dei dati di velocità
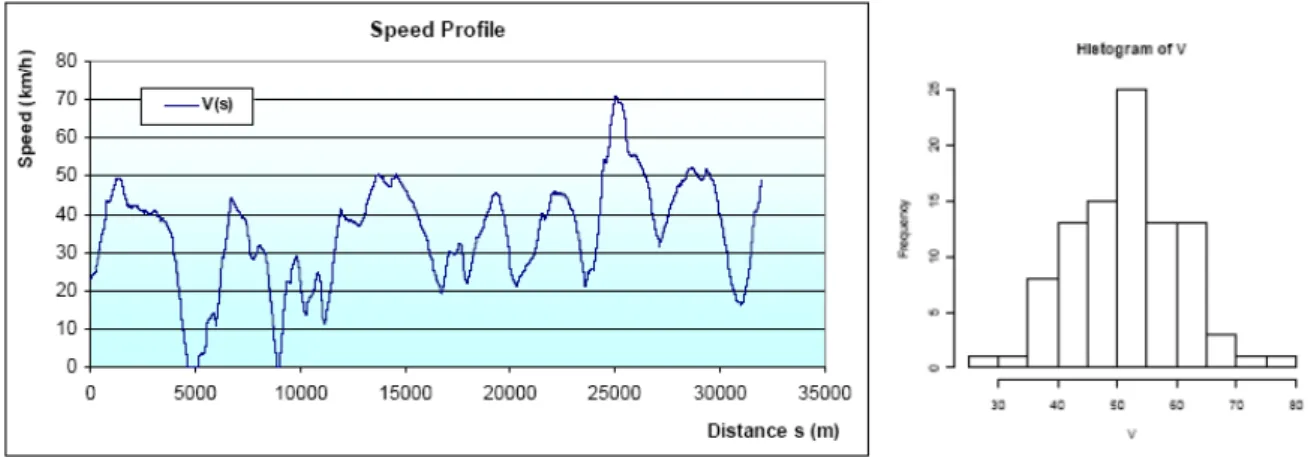
I profili di velocità registrati mediante la CAN, di cui è riportato un esempio in Figura 4a, evidenziano che il veicolo si muove in condizioni di moto vario, con variazione parabolica della funzione velocità e valori di accelerazione variabili a tratti; inoltre, come si può osservare da una delle curve di distribuzione dei valori massimi delle velocità rilevate in una generica sezione omogenea (Figura 4b), questi tendono a distribuirsi normalmente (normal distribution), con valori dell’85th percentile ben al di sopra del limite imposto per il tipo di strada (50 km/h) [12].
Figura 4: a) Esempio di profilo delle velocità registrato nella sperimentazione b) Distribuzione dei valori massimi delle velocità su una sezione omogenea
I valori di velocità registrati sono stati successivamente analizzati sulla base della classificazione dei drivers descritta al paragrafo precedente, in modo da evidenziare eventuali differenze di comportamento alla guida dei tre gruppi di soggetti ed individuare dei profili “sensibili” rispetto ai quali fornire linee guida di progettazione per migliorare la sicurezza stradale.
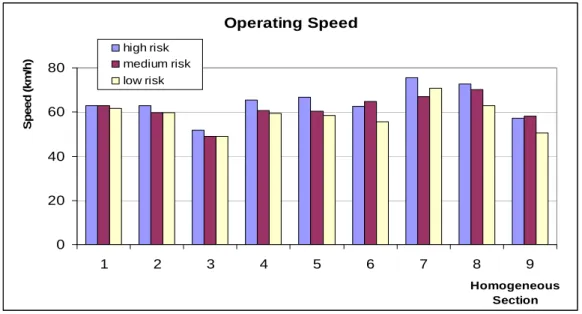
La figura 5 evidenzia come le velocità di picco raggiunte dall’85th percentile degli utenti di ogni cluster individuato superano, e di molto, il limite vigente di 50 km/h: in particolare, i soggetti classificati come maggiormente a rischio tendono a raggiungere velocità mediamente superiori agli altri due gruppi con differenze massime dell’ordine dei 10-15 km/h nei tratti più rettilinei e quindi più rappresentativi da questo punto di vista.
Operating Speed 0 20 40 60 80 1 2 3 4 5 6 7 8 9 Homogeneous Section Sp eed (km /h) high risk medium risk low risk
Figura 5: Velocità massime riscontrate in ogni sezione omogenea
In Figura 6 vengono mostrate, invece, le curve, ottenute per interpolazione, della funzione v=v(s) per ogni sezione omogenea, rappresentative del comportamento medio di ognuna delle tre categorie individuate. L’analisi di queste curve mostra come, ad eccezione della sezione n.5, il profilo di velocità “high risk” sia sempre superiore agli altri con picchi di 10-15 km/h.
L’analisi statistica dei valori di velocità eseguita sulle tre serie di dati, mediante la tecnica ANOVA, per un numero statisticamente rappresentativo di punti di rilievo nella sezione omogenea, ha portato a rifiutare l’ipotesi nulla di uguaglianza delle medie con una significatività p<0,05 e a confermare, pertanto, la significatività di tali differenze rispetto
Un’ulteriore conferma della incidenza degli aspetti psicologici sul comportamento alla guida viene dalla applicazione del test t-Student che mostra come il gruppo “medium risk” sia, per alcuni tratti, significativamente differente dal gruppo “high risk” (p<0,05) e, per quelli rimanenti, significativamente differente dal gruppo “low risk” (p<0,05).
Homogeneous Section No.1
0 10 20 30 40 50 60 70 0 100 200 300 400 500 600 Distance (m) Sp e e d ( k m /h ) high risk medium risk low risk
Homogeneous Section No.6
0 10 20 30 40 50 60 70 0 50 100 150 200 250 300 350 400 Distance (m) S p eed ( k m /h ) high risk medium risk low risk
Homogeneous Section No.2
0 10 20 30 40 50 60 70 0 50 100 150 200 250 300 350 400 Distance (m) Spe e d ( k m /h) high risk medium risk low risk
Homogeneous Section No.7
0 10 20 30 40 50 60 70 0 100 200 300 400 500 600 Distance (m) S p e e d ( k m /h) high risk medium risk low risk
Homogeneous Section No.4
0 10 20 30 40 50 60 70 0 100 200 300 400 500 600 Distance (m) S p eed ( k m /h ) high risk medium risk low risk
Homogeneous Section No.8
0 10 20 30 40 50 60 70 80 0 50 100 150 200 250 300 350 400 450 500 Distance (m) S p eed ( k m/ h ) high risk medium risk low risk
Homogeneous Section No.5
0 10 20 30 40 50 60 0 50 100 150 200 250 300 350 400 Distance (m) Spe e d ( k m /h) high risk medium risk low risk
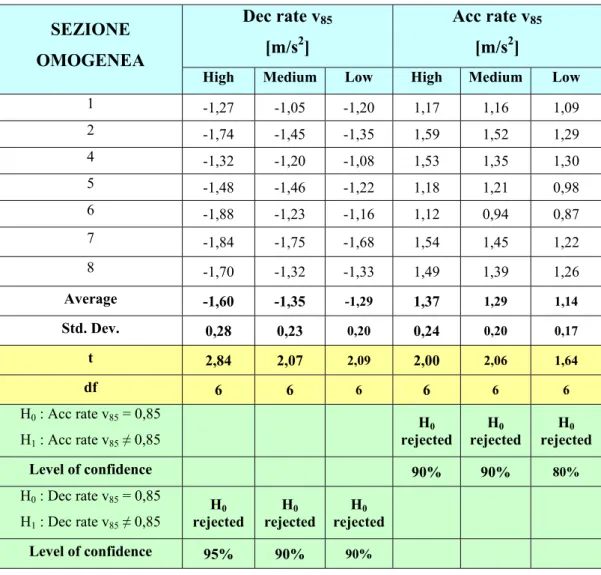
La costruzione dei profili relativi alla velocità operativa, invece, ha permesso di calcolare l’acceleration/deceleration rate. I valori ottenuti vengono riportati nella tabella 2. L’applicazione del test t-Student, per verificare l’uguaglianza di tali valori rispetto a quello di riferimento, pari a 0,85 m/s2 sia in accelerazione che in decelerazione, [10] porta al rifiuto dell’ipotesi nulla per cui i rate values possono ritenersi significativamente differenti:
Tabella 2: Significatività dei tassi di accelerazione/decelerazione calcolati
SEZIONE OMOGENEA Dec rate v85 [m/s2] Acc rate v85 [m/s2]
High Medium Low High Medium Low
1 -1,27 -1,05 -1,20 1,17 1,16 1,09 2 -1,74 -1,45 -1,35 1,59 1,52 1,29 4 -1,32 -1,20 -1,08 1,53 1,35 1,30 5 -1,48 -1,46 -1,22 1,18 1,21 0,98 6 -1,88 -1,23 -1,16 1,12 0,94 0,87 7 -1,84 -1,75 -1,68 1,54 1,45 1,22 8 -1,70 -1,32 -1,33 1,49 1,39 1,26 Average -1,60 -1,35 -1,29 1,37 1,29 1,14 Std. Dev. 0,28 0,23 0,20 0,24 0,20 0,17 t 2,84 2,07 2,09 2,00 2,06 1,64 df 6 6 6 6 6 6 H0 : Acc rate v85 = 0,85 H1 : Acc rate v85 ≠ 0,85 H0 rejected H0 rejected H0 rejected Level of confidence 90% 90% 80% H0 : Dec rate v85 = 0,85 H1 : Dec rate v85 ≠ 0,85 H0 rejected H0 rejected H0 rejected Level of confidence 95% 90% 90%
La procedura di calcolo per la determinazione di questi tassi è individuata in Figura 7 insieme ai valori massimi allo spunto ed in frenata per i diversi tipi di profilo di rischio determinati. Si fa osservare che, in presenza di più valori di tassi di accelerazione/decelerazione, si è considerato quello maggiore, più rappresentativo delle condizioni di marcia rispetto all’intervallo delle velocità di progetto delle infrastrutture urbane.
I valori di accelerazione longitudinale sono stati analizzati per determinare i valori massimi allo spunto e in frenata nelle zone di conflitto. L’85%-ile dei valori max di accelerazione allo spunto risulta superiore a 2 m/s2 in tutte le sezioni omogenee; allo stesso tempo, il
15%-ile dei valori di decelerazione risulta, in valore assoluto, maggiore di 3 m/s2, confermando i parametri forniti dall’AASHTO [6] per la determinazione della distanza di frenatura, che non avviene in condizioni limiti di aderenza. Quanto osservato per i valori di picco di velocità si riscontra nuovamente analizzando i valori massimi di decelerazione in approccio alle diverse zone di conflitto analizzate: il cluster “high risk” tende ad assumere un atteggiamento molto più aggressivo al volante con frenate più brusche ed al limite (valori di a compresi tra -3,00 e -3,60 m/s2) rispetto a quanto registrato per i soggetti classificati come più “prudenti”.
5.4.3 Spazio di frenatura
L’analisi del dato relativo all’istante di azionamento del sistema frenante (Figura 8) mette in evidenza come in ambito urbano le complessità geometriche e la presenza di fattori di ostruzione alla visuale incidano notevolmente sulla percezione dei punti singolari e facciano aumentare la probabilità di eventi incidentali (Tabella 3).
Tabella 3: Confronto tra spazi di frenatura calcolati e misurati
Homogeneous sections 1 2 4 5 6 7 8
Braking distance
measured [m] 25 28 40 46 43 42 30
Minimum Braking
distance [m] 51 48 43 46 47 54 52
Figura 8: Azionamento del sistema frenante
I valori della distanza di frenatura (braking distance) calcolata utilizzando la formulazione AASHTO [5][13], sulla base dell’85th percentile delle velocità e il 15th percentile della decelerazione hanno avuto buon riscontro nella maggior parte dei casi, salvo in corrispondenza di due rotatorie (ricadenti nelle sezioni omogenee n.2 e n.8), che hanno caratteristiche geometriche inadeguate, nonché di un attraversamento pedonale e di un semaforo (ricadenti rispettivamente nelle sezioni omogenee n.1 e n.7), dove esistono
CAN_Brake Pressure 0 20 40 60 80 100 120 140 0 500 1000 1500 2000 2500 3000 3500 4000 Distance (m ) B rake P ress u re CAN_brake_pressure
freno inizia ad una distanza nettamente inferiore rispetto a quella minima definita con il modello fisico. Questo determina situazioni più pericolose, che richiedono frenate brusche e rischi di collisione.
5.4.4 Raccomandazioni e linee guida
L’analisi del profilo di velocità di ogni sezione omogenea ha consentito di ottenere dei valori di acceleration/deceleration rate significativamente superiori al valore attualmente utilizzato di 0,85 m/s2 e che hanno portato alla definizione di nuovi range di riferimento, da utilizzare nella costruzione del diagramma delle velocità in ambito urbano e per la valutazione diretta delle velocità operative da inserire nel calcolo delle distanze di arresto e di approccio alle singolarità geometriche. Si è osservato inoltre che le decelerazioni max in corrispondenza delle singolarità geometriche tendono ad essere dell’ordine di 3,2 - 3,5 m/s2, che costituisce un range di valori più rappresentativo delle effettive condizioni operative dei veicoli e che si discosta dalle condizioni limiti di aderenza. Per quanto riguarda i valori limite di decelerazione, i risultati delle registrazioni confermano i valori di letteratura che prevedono, per veicoli dotati di ABS, il valore di 4 m/s2.
L’analisi del comportamento degli utenti in approccio alle intersezioni, abbinato allo studio delle caratteristiche geometriche dello scenario urbano e del dato incidentale registrato, permette inoltre di fare le seguenti ulteriori considerazioni:
- Vista la complessità degli scenari urbani, la promiscuità dei flussi circolanti e le velocità operative elevate che sono state registrate, sarebbe opportuno tener conto di tempi di percezione e reazione più ampi, spinti magari fino a 3,0 sec.
- L’analisi del dato di accelerazione max allo spunto porta a concludere che nel calcolo dei tempi di manovra alle intersezioni (left turn, crossing) devono essere presi in considerazione valori di a ≥ 2,0 m/s2;
- Le velocità in approccio alle varie tipologie di intersezione rispecchiano le prescrizioni AASHTO (V=25-30 km/h a 15-20 m dalla singolarità) [5] [14]; tale valore però va utilizzato con attenzione se visto in funzione della velocità operativa tenuta sul ramo, della distanza a cui inizia l’azione sul freno e dei valori di picco della decelerazione che evidenziano come il problema generalmente sia situato a monte dell’intersezione stessa. La progettazione in ambito urbano è spesso condizionata dall’ambiente circostante ed è perciò efficace l’inserimento di elementi rallentatori (traffic calming),
il cui posizionamento dovrà essere studiato imponendo la velocità massima desiderabile e considerando i parametri di accelerazione e decelerazione suddetti.
- Ai fini della verifica di sicurezza delle strade esistenti in ambito urbano, possono essere utilizzati gli standard geometrici proposti dai manuali AASHTO; i dati relativi ai valori di braking distance mostrano come il mancato rispetto delle prescrizioni geometriche determini comportamenti e reazioni ritardate da parte degli utenti con conseguente aumento del rischio incidentale.
5.5 CONCLUSIONI
Quanto esaminato nel presente articolo costituisce un primo passo di un approccio innovativo per la definizione di nuovi criteri progettuali riguardanti le infrastrutture urbane, che tengano conto non solo dell’elemento infrastruttura, bensì di tutte quelle interazioni che nascono all’interno del sistema complesso uomo-strada-veicolo-ambiente.
L’aspetto principale emerso dallo studio riguarda la diretta relazione che è stata osservata tra i comportamenti tenuti al volante e le caratteristiche psicologiche dei soggetti testati, classificati in tre classi comportamentali ben distinte e separate. Tale procedura è particolarmente utile per il progetto di campagne sperimentali finalizzate allo studio del comportamento degli utenti.
Le grandezze cinematiche esaminate, tenuto conto della complessità geometrica del contesto, hanno permesso di caratterizzare le condizioni di circolazione in ambito urbano ed individuare una serie di aspetti che possono contribuire al miglioramento delle condizioni di sicurezza, sia con riferimento alle caratteristiche progettuali degli elementi stradali che al fattore umano.
BIBLIOGRAFIA
1. J. L. Campbell, C.M. Richard, J.Graham, NCHRP Report 600A - 600B - Human Factors Guidelines for Road Systems, Transportation Research Board, Washington
D.C., 2008.
2. M.Zuckerman, Dimension of sensation seeking, Journal of Consulting and Clinical
Psychology, Vol 36(1), 45-52., Feb 1971 (1971);
3. N. Sumer, Personality and behavioral predictors of traffic accidents: testing a contextual mediated model, Accident analysis and prevention Volume 35, Issue 6,
Pages 949-964, November 2003;
4. T. Lajunen, D. Parker, H. Summala, The Manchester Driver Behaviour Questionnaire: a cross-cultural study, Accident Analysis and Prevention, Volume
36, Issue 2, Pages 231-238, March 2004.
5. R. Elvik, Speed and Road Safety - Synthesis of Evidence from Evaluation Studies,
TRR: Journal of the Transportation Research Board, No. 1908, Transportation Research Board of the National Academies, Washington, D.C., 2005, pp. 59–69.
6. D. Fambro et al., NCHRP Report 400 – Determination of Stopping Sight Distance,
TRB National Research Council, 1997.
7. D. Gettman, and L. Head, Surrogate Safety Measures From Traffic Simulation Models - Transportation Research Record: Journal of the Transportation Research
Board, 1840 Paper No. 03-2958, 2003.
8. B.W. Robinson et al., Roundabouts: an informational guide, Report No.
FHWA-RD-00-067, US Department of Transportation, Federal Highway Administration, June 2000;
9. A Policy on Geometric Design of Highways and Streets. American Association of
State Highway and Transportation officials (AASHTO), Washington, DC, 2004.
10. G.F. King, NCHRP Report 3-23 (unpublished): Guidelines for Uniformity in Traffic Control Signal Design Configurations. TRB, National Research Council,
Washington, D.C., 1977.
11. HS-3000/2010, On-Board Diagnostics for Light and Medium Duty Vehicles Standards Manual - 2010 Edition, SAE International, December 2009. 12. L. Kaufman, and P.J. Rousseeuw, Finding groups in data: An introduction to
13. K. Fitzpatrick, P. Carlson, M.A. Brewer, M.D. Wooldridge, Shaw-Pin Miaou, NCHRP Report504 Design Speed, Operating Speed, and Posted Speed Practices,
Transportation Research Board of the National Academies 2003.
14. D.B. Fambro, K.Fitzpatrick, and R.J. Koppa, New Stopping Sight Distance Model forUse in Highway Geometric Design, Transportation Research Record: Journal of
the Transportation Research Board, 1701-1 Paper No. 00-3250, 2000.
15. H.G. Hawkins, and N. Mokkapati, Minimum Signal Sight Distance Guidelines,
Transportation Research Record: Journal of the Transportation Research Board - Paper No. 07-2639, Washington, D.C. January 2007.