12
12
STRUTTURA E CONFIGURAZIONE
12.1 Introduzione
Il sistema strutturale supporta tutti i componenti del satellite, funge da organo di aggancio al lanciatore e ne provvede la separazione. In questo capitolo provvede-remo ad un’analisi ed ad una prima stima delle caratteristiche e delle dimensioni di questo sottosistema partendo da considerazioni sulla configurazione da adottare, te-nendo presenti i vincoli imposti dal lanciatore e considerazioni più meno generali sul modo di operare del satellite.
12.2 Requisiti strutturali
La prima distinzione che si può fare è tra le strutture cosiddette primarie, cioè quelle che resistono ai carichi principali indotti e che supportano i componenti prin-cipali, e le strutture secondarie che sono tutte quelle strutture che reggono i compo-nenti secondari (cavi, tubi vari, porte non strutturali etc.). La tabella 12.2-1 illustra i principali requisiti a cui deve soddisfare la struttura durante l’arco della sua missione.
tabella 12.2-1 Fonti tipiche di requisiti strutturali Fase della missione Requisiti
Fabbricazione e assemblaggio Stress introdotti da eventuali saldature e proces-si di fabbricazione
Trasporto Mezzo di trasporto (mare,aria,terra)
Test Test acustici e vibratori
Lancio e rilascio
Accelerazioni inerziali Rumore vibro acustico Vibrazioni del propulsore
Carichi impulsivi durante la separazione degli stadi del lanciatore
Colpi pirotecnici al momento della separazione
Missione
Spinte statiche
Carichi impulsivi durante manovre di controllo d’assetto
Colpi pirotecnici durante fasi di dispiegamento o rilascio di meccanismi
Tensioni termiche Rientro e atterraggio (se
presen-te)
Surriscaldamento aerodinamico Carichi di impatto a terra
Il lanciatore è senza dubbio la maggiore fonte di requisiti in quanto determina il peso e il volume massimo trasportabile; l’intera struttura e l’eventuale adattatore pesano tra il 10% ed il 20% del peso a vuoto del satellite.
Il bilancio strutturale dev’essere successivamente aumentato del 35% per te-nere conto degli organi di collegamento, qui non considerati, e di eventuali cambia-menti o sviluppi del programma spaziale.
Le dimensioni del satellite sono strettamente legate alle dimensioni del cargo ospitante. Le dimensioni del satellite ed il suo posizionamento all’interno del cargo sono limitate da quello che è chiamato inviluppo dinamico, che tiene conto delle pos-sibili deflessioni del sistema e di eventuali coperture termiche.
Sia il satellite che i lanciatore devono essere sufficientemente rigidi perché i due sistemi non vadano a toccarsi durante il lancio. In realtà oltre alla rigidezza ri-chiesta, il sistema deve essere in grado di evitare interazioni tra le frequenze proprie di oscillazione e le frequenze indotte provenienti dal motore del lanciatore e da effetti aerodinamici; oltre a questo l’intera struttura dev’essere in grado di reggere gli eleva-ti carichi inerziali che provengono dall’elevata accelerazione a cui è sottoposta. In
realtà le accelerazioni che per un primo dimensionamento vengono considerate come stazionarie, hanno una complessa sequenza temporale in quanto si parte da una con-dizione di accelerazione massima al momento di separazione tra gli stadi, che va di-minuendo (a causa del consumo di propellente) fino ad una brusca interruzione che accade all’atto della separazione con lo stadio successivo.
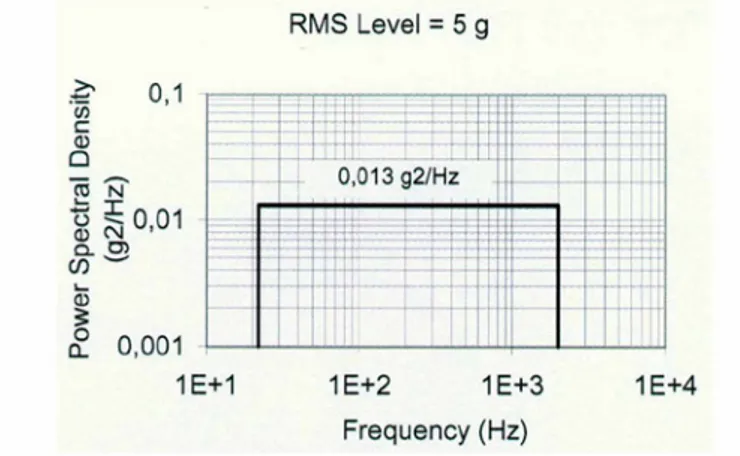
Le vibrazioni casuali sono sufficientemente descritte tramite tre parametri, di-stribuzione, contenuto di frequenza e intensità, assumendo che le vibrazioni abbiano una distribuzione Gaussiana, che determina la percentuale di tempo in cui la vibra-zione è compresa entro certi limiti. Il contenuto di frequenza è solitamente espresso come power spectral density, densità di potenza spettrale, (PSD) (anche se sarebbe meglio usare il termine accelerazione piuttosto che potenza) ed è misurato in g2/Hz come illustrato nella figura 12.2.1 presa da [8].
figura 12.2.1 PSD per VEGA
Un'altra fonte di carichi proviene dai meccanismi di rilascio, che normalmen-te sono dei sisnormalmen-temi pironormalmen-tecnici, i quali causano alnormalmen-te accelerazioni ed alnormalmen-te frequenze in intervalli di tempo infinitesimali, ciò comporta di prestare particolare attenzione alla loro disposizione per evitare iterazioni indesiderate con gli altri sistemi.
12.3 Requisiti di configurazione
Molti sono gli aspetti di cui si deve tener conto in fase della progettazione dell’allocazione dei vari sistemi all’interno del satellite; il primo, che risulta sicura-mente il più difficile, è quello di cercare di realizzare una struttura che sia contempo-raneamente la più compatta possibile, ma che abbia abbastanza spazio per l’aggiunta
Un altro aspetto molto importante risulta dall’analisi del sistema di controllo d’assetto che, nel caso di satelliti stabilizzati a 3 assi, richiede che le ruote di reazione siano il più vicino possibile al centro di gravità del sistema e che i magnetometri e i torsori magnetici siano sufficientemente distanti tra loro in modo da evitare interfe-renze magnetiche. Tutti i sensori montati sul satellite devono essere posizionati in una maniera tale che il campo di vista non sia oscurato dalle appendici esterne del sa-tellite come pannelli solari od antenne, naturalmente anche a queste ultime deve esse-re garantito un ampio campo di vista, ecco perché è molto comune montaesse-re tutti que-sti sistemi su appendici che vengono estratte successivamente, in orbita. L’intero ap-parato per la CPU deve essere posizionato in modo che sia il più possibile schermato dalle radiazioni elettromagnetiche; mentre l’apparato propulsivo deve essere posto in periferia al fine di evitare degradazione dei pannelli solari e per stare lontano dal cen-tro di massa del sistema; i pannelli solari devono essere opportunamente ripiegati du-rante la fase di lancio; le batterie devono essere posizionate in modo da essere com-pletamente accessibili durante la fase di sviluppo per test o per essere rimpiazzate.
In tutte le precedenti considerazioni è sottointeso che tutti i sistemi devono essere posti in modo di operare all’interno dell’intervallo di temperatura previsto per il loro funzionamento, per cui vi può essere necessità di dotare il sistema di un con-trollo termico, attivo o passivo.
12.4 Requisiti imposti dal lanciatore VEGA
12.4.1 Introduzione
Il VEGA è un lanciatore correntemente in via di sviluppo da parte di un team Europeo gestito da ELV (un’unione di imprese tra l’agenzia spaziale italiana (ASI) e Fiat Avio). L’Italia è la nazione a maggior partecipazione (65%), seguita da Francia (12.43%), Belgio (5.63%), Spagna (5%), Olanda (3.5%),Svizzera (1.34%) e Svezia (0.8%). Il team di progetto (IPT) è costituito da membri dell’ESA e delle agenzie spaziali Italiana e Francese (ASI e CNES), e gestirà sia i contratti che il funziona-mento totale del sistema dalla stazione ESRIN, sita nei pressi di ROMA e di proprie-tà dell’ESA.
Il VEGA permetterà il lancio di medio-piccoli satelliti (dai 300 kg ai 2000 kg) in maniera più veloce, e soprattutto più economica; i costi verranno mantenuti al minimo grazie all’utilizzo delle più moderne tecnologie ed utilizzando parte delle in-frastrutture già usate dai lanciatori Ariane. Il VEGA sarà inoltre in grado di utilizzare la stazione di lancio dell’ESA sita a Kourou (Guinea Francese).
Il primo test di lancio è pianificato per il 2006. Con una frequenza di tre - quattro lanci all’anno, i costi per ogni lancio sono stimati intorno ai venti milioni di Euro, con un a riduzione di circa il 15% rispetto ai corrispondenti lanciatori statuni-tensi.
12.4.2 Architettura del sistema.
Il lanciatore VEGA è stato concepito come un corpo unico composto da tre stadi: il primo stadio, P80, il secondo stadio, Zefiro 23, ed il terzo stadio, Zefiro 9.
Un modulo ulteriore, l’ AVUM (Attitude and Vernier Upper Module, modulo superiore di assetto e verniero), avrà il compito di rilasciare ed immettere il satellite in orbita, grazie ai suoi razzi a propulsione liquida.
figura 12.4.1 VEGA
12.4.3 Dati tecnici e prestazioni
VEGA è in grado di immettere il carico pagante su svariate orbite a partire dai 200 km fino ai 2000 km e con inclinazioni dai 5.2° fino a quelle eliosincrone.
Utilizzando l’orbita di riferimento (orbita polare posta a 700 km di quota) ,in condizioni di lancio ottimale, il VEGA consente di lanciare un carico di 1500 kg.
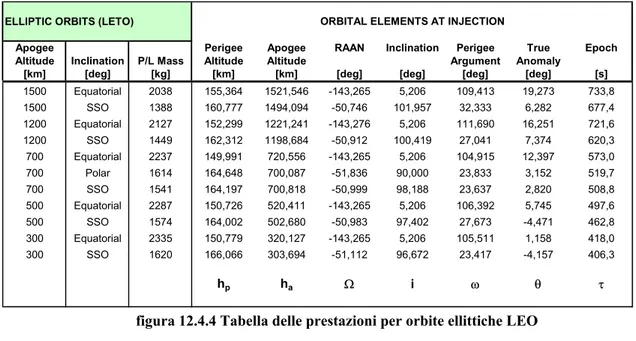
Le prestazioni per orbite LEO sono illustrate in figura 12.4.2 ; dalla figura si nota che le prestazioni decadono leggermente per orbite intorno ai 300 km; la perdita è dovuta al fatto che comunque l’AVUM deve essere riempito di una quantità mini-ma di propellente pari al 60 % del suo volume (circa 222 kg).
figura 12.4.2 Grafico delle prestazioni
CIRCULAR ORBITS (LEO)
Perigee Apogee RAAN Inclination Perigee True Epoch
Altitude Inclination P/L Mass Altitude Altitude Argument Anomaly
[km] [deg] [kg] [km] [km] [deg] [deg] [deg] [deg] [s]
1500 Equatorial 1533 1499,988 1499,989 -143,425 5,206 13,378 -73,894 3702,4 1500 SSO 1062 1500,001 1500,006 -50,723 101,957 26,796 179,447 3589,2 1200 Equatorial 1769 1200,000 1200,000 -143,456 5,206 10,979 -88,419 3318,5 1200 SSO 1202 1199,999 1200,000 -50,913 100,419 34,478 167,348 3412,6 700 Equatorial 2070 699,427 700,153 -143,525 5,206 104,767 -178,172 3218,4 700 Polar 1500 699,998 700,001 -51,835 90,000 19,887 -172,988 3325,1 700 SSO 1425 699,991 699,999 -50,914 98,188 6,620 -171,469 3142,0 500 Equatorial 2190 500,001 500,002 -143,543 5,206 -2,240 -74,790 3086,1 500 SSO 1504 499,996 499,998 -50,955 97,402 -6,790 -156,151 3105,0 300 Equatorial 1964 300,000 300,001 -143,532 5,206 -0,738 -74,241 3058,0 300 SSO 1310 299,999 300,001 -50,954 96,672 -20,328 -145,600 3002,5 hp ha Ω i ω θ τ
figura 12.4.3 Tabella delle prestazioni per orbite circolari
ELLIPTIC ORBITS (LETO)
Apogee Perigee Apogee RAAN Inclination Perigee True Epoch
Altitude Inclination P/L Mass Altitude Altitude Argument Anomaly
[km] [deg] [kg] [km] [km] [deg] [deg] [deg] [deg] [s]
1500 Equatorial 2038 155,364 1521,546 -143,265 5,206 109,413 19,273 733,8 1500 SSO 1388 160,777 1494,094 -50,746 101,957 32,333 6,282 677,4 1200 Equatorial 2127 152,299 1221,241 -143,276 5,206 111,690 16,251 721,6 1200 SSO 1449 162,312 1198,684 -50,912 100,419 27,041 7,374 620,3 700 Equatorial 2237 149,991 720,556 -143,265 5,206 104,915 12,397 573,0 700 Polar 1614 164,648 700,087 -51,836 90,000 23,833 3,152 519,7 700 SSO 1541 164,197 700,818 -50,999 98,188 23,637 2,820 508,8 500 Equatorial 2287 150,726 520,411 -143,265 5,206 106,392 5,745 497,6 500 SSO 1574 164,002 502,680 -50,983 97,402 27,673 -4,471 462,8 300 Equatorial 2335 150,779 320,127 -143,265 5,206 105,511 1,158 418,0 300 SSO 1620 166,066 303,694 -51,112 96,672 23,417 -4,157 406,3 hp ha Ω i ω θ τ
ORBITAL ELEMENTS AT INJECTION
figura 12.4.4 Tabella delle prestazioni per orbite ellittiche LEO
ELLIPTIC ORBITS (METO)
Apogee Perigee Apogee RAAN Inclination Perigee True Epoch
Altitude Inclination P/L Mass Altitude Altitude Argument Anomaly
[km] [deg] [kg] [km] [km] [deg] [deg] [deg] [deg] [s]
20000 45 535 198,858 20005,978 -56,500 45,000 18,270 33,070 778,6 20000 55 502 200,516 19984,052 -54,632 55,000 18,651 32,698 792,1 20000 65 470 201,122 19968,944 -53,816 65,000 16,043 16,043 768,1 GTO Equatorial 378 196,063 35951,078 -143,230 5,206 111,764 26,622 798,0
hp ha Ω i ω θ τ
ORBITAL ELEMENTS AT INJECTION
figura 12.4.5 Tabella delle prestazioni per orbite ellittiche MEO Le tabelle precedenti sono tratte da [8].
Per essere compatibile con il lancio, il satellite dovrà essere in grado di resi-stere alle accelerazioni statiche e casuali riportate in tabella 12.4-1.
tabella 12.4-1 Fattori di carico del VEGA
Accelerazione (g) Longitudinale Laterale Fase del volo Statico Dinamico Statico e Dinamico
Lift-off -2 1.5 1
P 80 (stadio 1) -5.3 1 1
Z 23 (stadio 2) -6 1 1
Z9 (stadio 3) -5 1 1
Vibrazioni random -5 5 5
Oltre a questo il satellite dovrà essere progettato affinché siano rispettate an-che le richieste riportate qui sotto.
• Per evitare accoppiamenti tra le frequenze del lanciatore ed i modi propri del satellite le frequenze proprie di quest’ultimo devono essere > 35 Hz per le vi-brazioni longitudinali e > 15 Hz per le vivi-brazioni laterali;
• i fattori di carico ultimo sono 1.25 a rottura e 1.10 a snervamento;
• il COG, centro di gravita, dev’essere compreso tra 200 e 2000 mm dal piano di separazione del veicolo spaziale ed entro 30 mm dall’asse di rollio.
• per il bilanciamento statico la distanza del baricentro dall’asse di rollio dev’essere inferiore ai 15 mm per satelliti stabilizzati a rotazione ed ai 30 mm per satelliti stabilizzati a 3 assi;
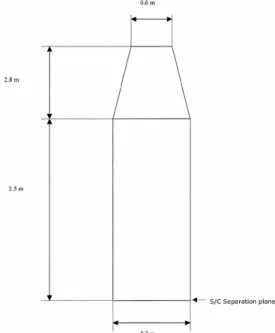
• l’inviluppo statico-dinamico dell’S/C dev’essere contenuto nel volume in figura 12.4.6.
12.5 Analisi della configurazione
Le suddette considerazioni portano a definire dei punti fermi nel progettare la struttura.
Essendo le dimensioni del nostro satellite principalmente legate alle dimen-sioni dei grossi pannelli solari non è possibile realizzare un sistema compatto, ma piuttosto si deve cercare la disposizione migliore degli elementi per realizzare un stema comunque di minima superficie frontale. Partendo dal presupposto che il si-stema dev’essere comunque contenuto all’interno di un cilindro virtuale di diametro 1 m e altezza 3 m la nostra scelta cade sulla possibilità di realizzare due corpi separa-ti possepara-ti alle 2 estremità del satellite e di un corpo centrale di collegamento, che regga la maggior parte dei carichi agenti sul satellite. Si assume, durante tutta la trattazione, qui di seguito esposta, che la forma di questi corpi sia ragionevolmente riconducibile a quella di un parallelepipedo con pianta esagonale come illustrato in 12.5-2.
La struttura di questi corpi dev’essere costituita da correnti longitudinali e da correnti perimetrali che a loro volta svolgano la funzione di contrapporsi ai carichi di taglio e di costituire degli appoggi per le piastre trasversali su cui verranno montati i vari componenti del sistema.
Il materiale usato è pensato essere alluminio (dati secondo norma MIL-HDBK-SG (1994); affidabilità 99%).
• Per le piastre: 7075-T73 con una densità ρ = 2.80 103 Kg/m3, una tensione limite a snervamento Su=460 MPa ed un modulo di Young E=71 GPa
• Per i correnti: 6061-T6 con densità ρ = 2.71 103 Kg/m3, tensione limite a snervamento Su=290 MPa e modulo di Young E=71 GPa
Tutte le conclusioni riportate nelle figure sono da intendersi come una studio degli ingombri del satellite e delle eventuali alternative possibili per una corretta di-sposizione dei componenti all’interno del satellite, piuttosto che una ricerca di una configurazione definitiva. Del resto le dimensioni e la forma dei vari sottosistemi so-no solo indicative, ma ci si può aspettare che i sistemi nella realtà mantengaso-no pres-sappoco gli ingombri ipotizzati.
12.5.1 Corpo inferiore
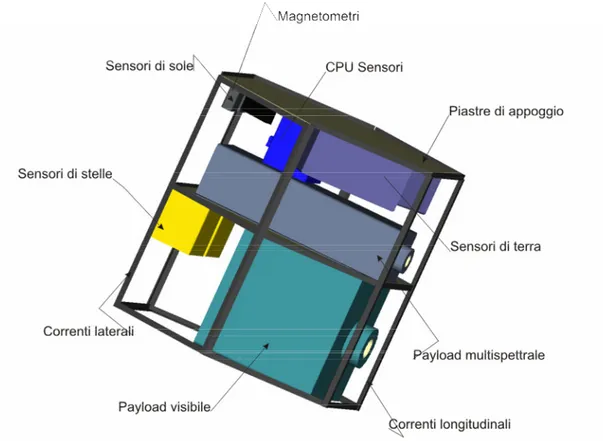
figura 12.5.1 Struttura superiore I componenti sono stati disposti tenendo presente che:
• entrambi i carichi paganti sono stati montati su questa parte del satellite per tenerli il più lontano possibile da fonti di calore e di vibrazioni, quali posso essere i propulsori e le ruote di reazione, inoltre entrambi puntano verso la Terra in quanto è lì che deve essere fatta l’acquisizione delle immagini; • sia i sensori di stelle che quelli di Sole sono stati montati in direzione opposta
alla Terra per permettere loro di puntare rispettivamente verso il Sole, e verso le stelle fisse;
• i sensori di terra sono stati montati sui due lati dell’esagono di base che pun-tano verso Terra; infatti questi sono dei sistemi relativamente ingombranti che vanno a misurare l’angolo tra il satellite e l’orizzonte terrestre. Per questo motivo non è necessario montarli sulla faccia diretta secondo il Nadir, dove peraltro avrebbero causato maggiori difficoltà nel posizionamento dell’elemento ridondante;
• i magnetometri sono stati montati su questo corpo per tenerli il più lontano possibile dai torsori magnetici;
• come si vede tutti i sensori sono stati montati su questo corpo del satellite; questa scelta, apparentemente non corretta a causa dell’aumento sensibile del-la lunghezza dei cavi che li collegano ai computer, in realtà ci permette di
e-quilibrare negativamente il grosso peso dei carico pagante e, quindi, di man-tenere il baricentro il più vicino possibile al centro del satellite;
Per quanto riguarda il dimensionamento degli elementi longitudinali ne viene fatta solo una stima in quanto in questa fase del progetto non si è ancora a conoscen-za dei reali pesi dei componenti.
Per fare ciò si determina prima le entità dei carichi che agiscono sul corpo sia in senso longitudinale che in senso laterale utilizzando il sistema di coordinate indi-cato in figura 12.5.2
figura 12.5.2 Sistema di coordinate e quindi utilizzando le relazioni
) ( ax ran sner ax Massa g SF LF LF F = ⋅ ⋅ ⋅ + 12.5-1 ) ( lat ran sner lat Massa g SF LF LF F = ⋅ ⋅ ⋅ + 12.5-2 dove SF è il fattore di sicurezza previsto (1.1 per snervamento), LF è il fattore di ca-rico (proviene dell’accelerazione statica e dai carichi casuali) e Massa è la massa del corpo supposta concentrata nel baricentro. Con queste forze si va a determinare i momenti agenti sul sistema tramite la 12.5-3 e la 12.5-4.
z lat y ax x F CG F CG M = ⋅ + ⋅ 12.5-3
tabella 12.5-1 Carichi agenti sul corpo inferiore Massa [kg] 65 Fax [kN] 8.8 Flat [kN] 5 Mx [Nm] My [Nm] 6321
Avendo precedentemente definito la forma di questi corpi è logico ora sup-porre che questi correnti vengano posti agli spigoli dell’esagono e che la loro forma sia assimilabile ad un classico profilato ad L le cui dimensioni sono illustrate in figura 12.5.3.
figura 12.5.3 Sezione trasversale del corrente
Con i momenti è possibile calcolare le tensioni agenti su ognuno dei correnti utilizzando le seguenti relazioni
∑
∑
= = + ⋅ ⋅ = 6 1 6 1 2 i i ax i i i i x i x A F y A y M σ 12.5-5∑
∑
= = + ⋅ ⋅ = 6 1 6 1 2 i i ax i i i i y i y A F x A x M σ 12.5-6 Scegliendo l’area della sezione in pianta del corrente è possibile calcolare le tensioni agenti su di esso e confrontarle con le tensioni critiche del materiale come si vede intabella 12.5-2. tabella 12.5-2
Una volta scelte le dimensioni dei correnti si può passare ad un calcolo di prima approssimazione per vedere se le frequenze proprie della struttura ideata siano sufficientemente lontani dalle frequenze indotte dal lanciatore; per fare ciò ci si ri-conduce ad uno schema molto semplificato, ma efficace per i nostri scopi, che consi-ste in un cilindro in parete sottile con una massa concentrata all’estremità come si vede in figura 12.5.4.
figura 12.5.4 Schema di un cilindro con una massa concentrata all’estremità
Le relazioni che ci permettono di calcolare le frequenze proprie di questa struttura sono: 2 333 . 0 16 . 0 L Area L M Area E tot tot ax ⋅ ⋅ ⋅ + ⋅ ⋅ = ρ ω 12.5-7 4 236 . 0 276 . 0 3 L Area L M I E tot lat ⋅ ⋅ ⋅ + ⋅ ⋅ = ρ ω 12.5-8 Le relazioni precedenti permettono di arrivare ai risultati riportati in
tabella 12.5-2, mentre in figura 12.5.5 vengono messi in evidenza gli ingom-M
Areai [mm2] 150 σi [MPa] 52 L [mm] 21 T [mm] 4 ωax [Hz] 66 ωlat [Hz] 109
figura 12.5.5 Ingombri del corpo inferiore
12.5.2 Corpo superiore
Per quanto riguarda il corpo superiore possiamo procedere ad un analisi ana-loga a quella effettuata per il corpo inferiore.
figura 12.5.6 Corpo superiore
• Le ruote di reazione sono state poste il più vicino possibile al centro di gravi-tà dell’intero sistema così da favorirne un più corretto funzionamento.
• Il trasponder è stato posto nelle vicinanza delle antenne.
• La disposizione dei componenti della CPU ha seguito la logica di mettere i componenti più leggeri più vicino al centro del sistema, in modo da permette-re ai componenti più pesanti di equilibrapermette-re il peso degli strumenti di fotogra-fia.
• I torsori magnetici sono stati posizionati agli antipodi dei magnetometri in maniera da disaccoppiare gli effetti di questi due sistemi, utilizzandone al contempo il peso per bilanciare il satellite.
• Sempre per le stesse ragioni di bilanciamento si è scelto di posizionare le bat-terie vicino al propulsore, in quanto quest’ultime pesano circa 9 kg ciascuna. • Per quanto riguarda la sistemazione dell’apparato propulsivo si vede che la
struttura così ideata permette di tenere lontano i propulsori dai pannelli solari e dal resto del satellite e ,come vedremo più avanti, di allineare la spinta pro-pulsiva con il baricentro del sistema. Inoltre si deve notare che si prevede di montare i propulsori all’interno dei contenitori a forma di tronco di cono in modo da coprire maggiormente le zone adiacenti dagli scarichi del propulso-re.
Per quanto riguarda un abbozzo di analisi strutturale si segue la stessa li-nea del precedente paragrafo per cui si ottengono i risultati elencati nelle seguenti tabelle.
tabella 12.5-3 Carichi agenti sul corpo su-periore Massa [kg] 140 Fax [kN] 19 Flat [kN] 11 Mx [Nm] My [Nm] 13600
tabella 12.5-4 Risultati ottenuti per i cor-renti del corpo superiore
Areai [mm2] 150 σi [MPa] 112 L [mm] 21 T [mm] 4 ωax [Hz] 45 ωlat [Hz] 75
figura 12.5.8 Ingombri del corpo superiore
12.5.3 Corpo centrale e struttura totale del satellite
Seguendo la linea guida già utilizzata nei precedenti paragrafi si forniscono innanzi-tutto i risultati dell’analisi dei carichi per il corpo centrale.
tabella 12.5-5 Carichi agenti sul corpo cen-trale Massa [kg] 290 Fax [kN] 40 Flat [kN] 31 Mx [Nm] My [Nm] 60000
tabella 12.5-6 Risultati ottenuti per i cor-renti del corpo superiore
Areai [mm2] 400 σi [MPa] 167 L [mm] 30 T [mm] 8 ωax [Hz] 48 ωlat [Hz] 72
figura 12.5.10 Configurazione generale del satellite visto superiormente
Anche in questo paragrafo vengono spiegate le ragioni che hanno portato alla precedente scelta.
• L’antenna più il sistema di puntamento sono stati posti relativamente vicino al corpo superiore, questo per via delle già citate ragioni di posizionamento del baricentro, e quindi molto vicini al trasponder per diminuire la quantità di cavi di collegamento.
• All’interno del corpo centrale si suppone che passino tutti i cavi e gli eventua-li tubi di calore che collegano i due corpi di estremità.
• Sulla faccia opposta al Nadir, come si vede in figura 12.5.10, si devono prati-care dei tagli sul pannello centrale per garantire la visibilità completa ai sen-sori di Sole e di stelle, come del resto era stato già previsto in fase di analisi del sistema di potenza.
• La struttura multicorpo permette di disaccoppiare facilmente problemi mec-canici e termici tra i due semicorpi.
figura 12.5.11 Satellite durante la fase di lancio
Da questa ultima figura si possono notare altri aspetti importanti per quanto riguarda la configurazione adottata:
• la posizione del baricentro del sistema è all’incirca al centro del satellite; que-sto ci permette di rimanere all’interno dei valori previsti dall’autorità di lan-cio.
• Durante la vita utile del sistema il baricentro si sposta di solo 100 mm, a cau-sa del progressivo svuotamento del serbatoio di propellente. Quest’ultimo ef-fetto è di particolare importanza perché permette di semplificare il progetto del sistema di controllo.
• La scelta di orientare l’asse dei propulsori di circa 14° rispetto all’asse di rol-lio fa si che la direzione della forza passa quasi attentamente per il centro di
massa del satellite, in maniera da annullare il momento di imbardata altrimen-ti presente (si ricordi che è in funzione un solo propulsore alla volta). Inoltre si è scelto di far passare l’asse per la posizione che il baricentro dovrebbe as-sumere a fine vita operativa. Questo fa si che la condizione di funzionamento peggiore, cioè la maggiore coppia di disturbo, accada all’inizio della vita ope-rativa quando il sistema di controllo è maggiormente funzionale.
• L’ingombro massimo del satellite previsto è di circa 3500 mm mentre il peso della struttura ideata è di circa 40 kg ,per cui si avrà un satellite pesante circa 284 kg molto al di sotto dei 400 kg previsti inizialmente.
Riassumendo i pro e i contro delle scelte effettuate si giunge alla seguente ta-bella
tabella 12.5-7 Pro e contro della configurazione adottata
Scelte effettuate Vantaggi Svantaggi
Utilizzo di una struttura multi-corpo
• Minore peso della struttura in quanto questa è posizionata proprio là dove serve. • Possibilità di disaccoppiare i
problemi meccanici e termici tra i sottocorpi.
• Maggiore possibilità di posi-zionamento del baricentro del sistema.
o Maggiore complessità della strut-tura e di tutti gli organi di colle-gamento associati.
o Maggior volume occupato dai cavi di collegamento e dagli eventuali tubi di calore
Disposizione dei vari elementi all’interno della struttura
• Posizionamento del baricentro in vicinanza delle ruote di rea-zione
• Minimizzazione delle interfe-renze tra i magnetometri ed i torsori magnetici
• Allontanamento dei sensori dalle fonti di calore e dalle possibili sorgenti di vibrazioni.
Maggiore complessità dell’intera strut-tura di collegamento tra i vari compo-nenti
Disposizione del satellite
all’interno del lanciatore
Il satellite viene posizionato in mo-do da essere agganciato sulle strut-ture più robuste
Il satellite deve essere orientato al momento del rilascio




![tabella 12.5-1 Carichi agenti sul corpo inferiore Massa [kg] 65 F ax [kN] 8.8 F lat [kN] 5 M x [Nm] M y [Nm] 6321](https://thumb-eu.123doks.com/thumbv2/123dokorg/5659206.70949/12.892.214.367.183.358/tabella-carichi-agenti-sul-corpo-inferiore-massa-lat.webp)
