3
Stato dell'arte
IntroduzioneIn questo capitolo saranno analizzati i principali sistemi di localizzazione sia relativa che assoluta. Alcuni di questi sistemi fanno ormai parte della nostra vita quotidiana o integrati in più ampie tecnologie che caratterizzano il mondo moderno, altri sono studiati come possibili applicazioni o evoluzioni tecnologiche nel campo dei controlli automatici dei robot, di sistemi di ottimizzazione industriale o di automatismi di servizi. Dei primi ne vedremo alcuni, perché una trattazione completa non aggiungerebbe informazioni salienti. Degli ultimi non ci occuperemo perché comunque sono riconducibili all'applicazione di metodologie classiche rivisitate per adattarsi alla particolare applicazione, altri sono già stati menzionati nel coso della trattazione del capitolo 2 riguardo alle metodologie di calcolo delle coordinate spaziali. Si vedrà come spesso le decisioni progettuali vadano incontro a determinati requisiti che il sistema richiede in previsione ad un suo utilizzo pratico.
3.1 Classificazione
Prima di analizzare alcuni dei più noti sistemi di localizzazione, in questo paragrafo viene presentata una classificazione riassuntiva che colloca tali sistemi nelle categorie metodologiche già viste. Di tali sistemi se ne analizzeranno solo quelli che presentano degli aspetti interessanti, altri verranno citati al solo scopo di riferimento bibliografico.
● Prossimità ad un riferimento (Riconoscimento di landmark naturali o artificiali):
○ Landmarks/Beacons: ParcTab, Active Badge,Cricket,RFID
○ Model Matching (navigazione visiva, per lo più usata nel campo della navigazione robotica [25,27])
○ MAP Based Positioning (ricostruzione della mappa attraverso
sensori di scansione [17,20,23,24])
● Angolo rispetto ad un riferimento
○ Compassi magnetici (si rimanda l'analisi al 4° capitolo [43])
○ Triangolazione da punti Radio: VOR
● Distanza da un riferimento (Time of Flight, Trilaterazione) ○ RF: GPS, PinPoint
○ Ultrasonici: Active Bat, Lew
○ Signal Fading (attenuazione segnale RF o sonora, non si conoscono implementazione di tale metodologia)
○ EM (campo elettromagnetico): Flock of Bird/3Space Tracker
● Ground based RF (Loran, RADAR, in particolare il LORAN è una
implementazione della multilaterazione)
3.2 Active Badges
Il problema della localizzazione e il coordinamento dello staff in una grande organizzazione è sempre stato un argomento ricorrente, ad esempio negli ospedali in cui la localizzazione dei pazienti e del personale medico nei casi di emergenza
risulta tuttora un risulta una necessità. In un ufficio le centraliniste sono di solito incaricate di rintracciare i membri dello staff, spesso chiamando tutti i possibili recapiti che un impiegato ha preventivamente inserito in un elenco pubblico.
Gli Active Badges sono dispositivi di localizzazione pensati proprio per risolvere questo tipo di esigenze in ambienti lavorativi e per installazioni di altra sicurezza negli edifici. Nati da uno studio della Olivetti per la prima volta nel 1989 [37], si presentano come dei piccoli tag (semplici cartellini da indossare) di 55x55x7mm dal peso di 40g. Ogni trasduttore IR ha una portata di 6 metri.e i consumi molto bassi permettono un'autonomia di circa un anno. Il singolo tag è identificato univocamente da un codice emesso ogni 15 secondi tramite un impulso infrarosso modulato in ampiezza, che viene captata da diversi ricevitori posizionati sulle pareti delle stanze, nei corridoi e nelle trombe delle scale. All'incirca ogni secondo un computer esegue l'interrogazione per determinare la posizione di ogni tag all'interno dell'edificio.
Quando un tag è stato identificato viene creato un record dell'evento memorizzato all'interno di un database insieme alla data, l'ora, il codice identificativo, la vecchia e la nuova posizione; il server centrale rende disponibili queste informazioni per tutte le applicazioni che abbiano necessità di queste informazioni.
Ad esempio tramite questi sistemi di tracciamento è possibile “farsi inseguire” da una discussione telefonica (call farward), farsi passare una telefonata (call transfer), rendere il personale sempre rintracciabile, permettere di limitare l'accesso a determinate aree solo al personale autorizzato. Tuttavia sono dispositivi che non offrono una grande accuratezza e precisione, si limitano semplicemente ad individuare la stanza, il piano o tracciare i movimenti del personale
In aggiunta al semplice report, un interprete di comandi permette di eseguire delle ricerche più accurate:
● FIND (name). Fornisce la posizione di (name) e se questi si è recentemente spostato dalla sua ultima locazione negli ultimi 5 minuti.
● WITH (name). Fornisce la posizione del badge indicato e informazioni
su gli altri badge presenti nelle sue immediate vicinanze.
● LOOK (location). Fornisce i badge correntemente prossimi ad una locazione specificata.
● NOTIFY (name). Genera un beep sonoro non appena il badge indicato
si trovi a passare vicino ad un ricevitore.
● HISTORY (name), Genera un report di sintesi di luoghi attraversati da (name) nell'ultima ora. Il sistema intenzionalmente non memorizza gli spostamenti del personale per periodi più lunghi su memorie di massa.
Poiché i segnali hanno la durata di circa una decina di secondi, la possibilità che due segnali, provenienti da due tag nella stessa stanza, collidano è di 2/150. Per ridurre questa probabilità nel caso di più persone, si progetta intenzionalmente il
trasmettitore con un oscillatore a bassa tolleranza (circa il 10%), permettendo di distinguere due ID anche se gli impulsi sono sincronizzati, infatti questa verrà persa sicuramente nei periodi successivi.
Un prerequisito fondamentale è la disponibilità di una rete di computer, ove la cablatura aumenti troppo i costi di installazione, spesso si ricorre all'uso di doppini telefonici, mentre il trasferimento dei dati segue lo standard RS232.
Sistemi più evoluti permettono di comporre numeri telefonici vocalmente o mostrare il numero di telefono del chiamante, fondamentalmente possono essere assimilati ad un cerca-persone di tipo attivo.
Questo tipo di applicazione ha suscitato diversi interrogativi riguardo la reale necessità di questo sistema, soprattuto per quanto riguarda motivi sociologici che riguardano il rispetto della privacy sul posto di lavoro. Spesso il personale non ha accettato di barattare l'invasività di tali sistemi per un alquanto discutibile vantaggio tecnologico, per tali ragioni sono stati fatte anche indagini sociologiche [38] per cercare di capire il livello di penetrazione che avrebbe potuto ottenere sul mercato l'introduzione di tale sistema. Altri motivi riguardano soprattutto il fatto che i tag conferiscono ed accentuano i diversi livelli di autorità nell'ambito lavorativo, nonché creano dei caratteri distintivi tra diversi gruppi di lavoro formando dei clan di appartenenza e innescando conflittualità.
3.3 Xerox ParcTab
In fase di sviluppo sin dal 1992, nel 1993 venne rilascia una prima versione per usi generali, mentre nel 1994 venne finalmente stabilizzato.
Il progetto PARCTAB parte dall'idea di costruire un sistema di computer mobile funzionante all'interno di un ufficio. Il sistema PARCTAB è un prototipo sviluppato da Xerox PARC che consiste di un computer palmare (generalmente indicato con il termine “tab”) in comunicazione attraverso un transceiver ad infrarossi con una applicazione su workstation in comunicazione con ogni altro desktop all'interno di local area network (LAN). Il tab ha una interfaccia grafica in grado di modificarsi in funzione del contesto spaziale in cui si trova ad operare il personale.
Figura 25: PARCTAB Mobile Hardware
Figura 26: "Deathstar" Basestation
Il transceiver (Deathstar) come si vede dalla figura risulta costituito da un array di 24 LED IR disposti in cerchio in modo da coprire ognuno un settore di 15°per la trasmissione. Mentre in ricezione due forniscono una copertura di 360°. Il trasmettitore è progettato per essere posizionato sul soffitto, possibilmente al centro della stanza, in modo che non ci siano zone oscure.
Poiché si ha difficoltà a sintonizzare i ricevitori IR intorno ad una banda di frequenze molto stretta, invece di utilizzare una trasmissione a divisione di banda, per creare dei sotto-canali si è optato per un multiplexing a divisione di tempo e la comunicazione organizzata a pacchetti di informazione.
Tale sistema risulta molto simile ad un Active Badge da cui trae inspirazione, ossia si basa su di un sistema di localizzazione su mappa topologica e sulla “cellularizzazione” dell'ambiente interno.
3.4 Cricket: Location-Support System
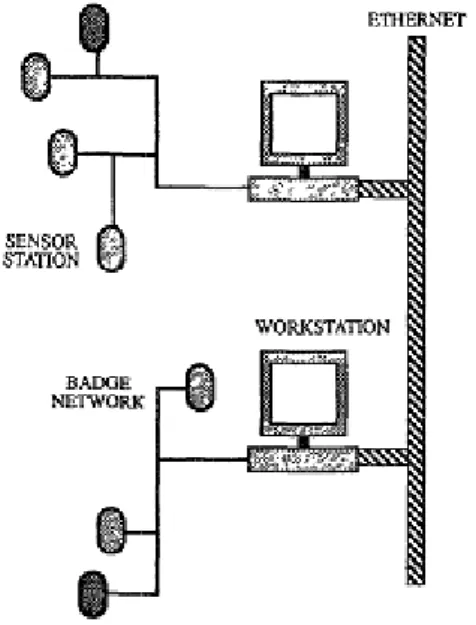
Il sistema Cricket è progettato per permettere ad applicazioni che girano su dispositivi mobile o in posizioni statiche di conoscere la propria localizzazione e decidere a chi fornire tale informazione utilizzando alcuni ricevitori che analizzano le trasmissioni inviate da alcune boe disseminate all'interno dell'edificio. Il sistema è completamente decentralizzato, non prevedendo alcun tipo di coordinamento tra le boe, scalabile e dai costi molto bassi.
Il Cricket nasce dall'esigenza di creare una tecnologia di tipo location-dependent o context-aware che permetta di adattare i suoi comportamenti e le interfacce utenti alla attuale posizione nello spazio, nonché dall'avvertita potenzialità in applicazioni per ufficio o domestiche di un sistema in grado di cambiare completamente il modo di interazione con l'ambiente.
Il lavoro di amministrazione e manutenzione dell'infrastruttura hardware e software è ridotto al minimo data la sua scalabilità che permette di gestire qualche
centinai di dispositivi all'interno dello stesso edificio grazie ad una apposito algoritmo di comunicazione.
Nella sua realizzazione sono stati considerati obiettivi primari:
● Privacy Utente: al contrario di altri sistemi di localizzazione in cui i
percorsi effettuati da un utente o qualsiasi altra periferica monitorata, sono tracciati e memorizzati all'interno di un database, questo sistema permette ad un client di conoscere la propria posizione senza l'uso di un'unità centrale in modo da costruire una querie per risorse specifiche per un dato spazio.
● Amministrazione decentralizzata: non si possono sviluppare e amministrare sistemi scalabili quando le funzioni di controllo e gestione sono centralizzate. Il sistema è decentralizzato nel senso che l'occupante o il proprietario di uno spazio (ad esempio l'impiegato di un ufficio) configura e installa una boa di localizzazione che identifica lo spazio stesso integrandosi con il resto del sistema. Il ricevitore, chiamato anche listener, è attaccato ad ogni dispositivo di interesse per l'utente. Il listener usa un particolare algoritmo deduttivo per determinare lo spazio in cui è stato posizionato ascoltando le trasmissioni delle boe.
1. Eterogeneità della rete: in molti ambienti di lavoro esistono diversi tipo di tecnologie di rete (Ethernet, Wireless, CDPD cellular digital packet data, infrarosso , telefonia). Indipendentemente dalla tecnologia, molti servizi o client possono beneficiare dalla conoscenza della propria dislocazione spaziale in maniera automatica. Ciò viene realizzato disaccoppiando il sistema Cricket da altri tipi di meccanismi di comunicazione.
2. Costi: dovendo realizzare un sistema per grandi ambienti lavorativi il costo del singolo cricket è stato mantenuto al di sotto dei $10.
3. Granularità: uno degli obiettivi è stato quello di rendere il sistema capace di distinguere porzioni della stessa stanza. Questo ha reso necessario
un sistema in grado di demarcare i limiti tra regioni corrispondenti a diverse boe.
Il cricket usa come metodologia computazionale della posizione la combinazione di Radio Frequenze e di Ultrasuoni. Delle boe montate in corrispondenza delle pareti o del soffitto sono disseminate all'interno dell'edificio, trasmettendo informazioni di posizione attraverso un segnale RF simultaneamente ad un impulso ultrasonico. Dato che il segnale RF e quello ultrasonico hanno diversi tempi di propagazione, quando il listener riceve un segnale RF da una boa, attiva il proprio ricevitore ultrasonico e aspetta l'arrivo dell'impulso, il quale giunge con un certo tempo di ritardo. Quindi usa i due segnali, in concomitanza con quelli provenienti da altre fonti, per stimare la distanza dei beacon, attraverso il calcolo del time of flight.
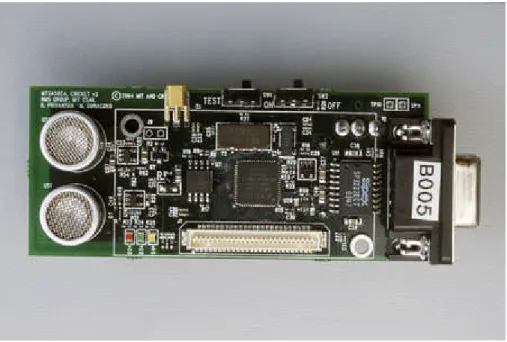
Di fatto il listener e il beacon sono identici, nel senso che hanno lo stesso hardware. Una unità Cricket può funzionare sia come beacon sia come listener o essere utilizzata in modalità “mista”. Si possono collegare vari dispositivi ad un Cricket attraverso un connettore a 51pin inoltre è disponibile un prototipo con una
interfaccia Compact Flash (CF) che può risultare molto utile con i laptop.
In aggiunta alla stima delle coordinate spaziali, il Cricket permette anche di determinare l'orientamento, tuttavia questa caratteristica è solo dei prototipi e non ancora disponibile a livello commerciale [36].
Affinché il sistema sia decentralizzato, naturalmente, non è previsto alcun sistema di coordinamento tra le trasmissioni tra boe differenti, le quali potrebbero trovarsi anche molto vicine, né i listener trasmettono alcuna informazione per non compromettere la privacy. Il mancato coordinamento potrebbe compromettere la corretta correlazione del segnale ultrasonico con quello a radio frequenza. Inoltre gli effetti di multipath, che provocano allungamenti del persorso del segnale ultrasonico, potrebbero generare delle stime errate della distanza ( tra l'altro questo è il motivo per cui risulta molto difficile generare modulazioni su un segnale ultrasonico, che pertanto si fa in modo che sia sempre un singolo impulso).
I beacon usano un algoritmo di trasmissione decentralizzato e randomizzato per minimizzare le collisioni e le interferenze con ciascun altro, mentre i listener implementano un algoritmo di decodifica per superare gli effetti di multipath degli echi ultrasonici e le interferenze RF. In particolare, i listener ascoltano diversi campioni di segnali RF e US e cercano di determinare la correlazione esistente tra le varie coppie {RF,US} inviate in concorrenza da più boe, determinando lo spazio associato dalla coppia che determina la distanza più breve. Al contrario, per ridurre i problemi di collisione, i beacon usano una trasmissione randomizzata: gli istanti di trasmissione dei segnali sono scelti uniformemente all'interno di un intervallo temporale [R1,R2]ms. Questa scelta fa in modo che la trasmissione di una boa sia statisticamente indipendente da ciascun altra, riducendo di fatto la possibilità di collisione ripetuta e persistente. La scelta dell'intervallo temporale dipende dal numero di boe che si prevede di dover gestire e dal tempo di trasmissione che si intende garantire Affinché l'informazione possa raggiungere il listener, che di solito dipende dalla dimensione dei messaggi inviati e dalla banda. Nell'implementazione del Cricket è stato scelto un periodo di trasmissione medio di 250ms all'interno di un
periodo [150, 350]ms. Di fatto frequenze più piccole incrementano il tempo che statisticamente intercorre tra le collisioni, mentre alte frequenze rendono le collisioni molto più probabili. Poiché il segnale US non attraversa le pareti (cosa invece possibile per quello RF), è impossibile per un listener ricevere un segnale ultrasonico senza ricevere quello a radiofrequenza.
Vediamo brevemente l'algoritmo utilizzato per la correlazione dei segnali RF e US. Sia S la massima dimensione del messaggio inviato in bit attraverso il canale RF (si sceglie un basso bit rate) con un bit rate di b bits/s e sia τil tempo massimo di propagazione del segnale ultrasonico nell'aria tra un beacon e un listener. Un valore di b<S/τindica che il segnale ultrasonico, corrispondente a un dato messaggio RF, deve ancora arrivare, nello stesso intervallo di tempo in cui i bits del messaggio S devono essere ancora ricevuti completamente. In concomitanza al fatto che il segnale US si propaga più lentamente, si può affermare che ogni potenziale impulso correlato deve arrivare quando ancora la stringa S non è stata completamente trasmessa. In assenza di collisioni questa semplice verifica garantisce la corretta correlazione.
In aggiunta alla trasmissione della stringa determinante lo spazio associato, ogni beacon trasmette un id unico, la coppia stringa-id è unica in tutto il sistema, ciò permette all'algoritmo di correlazione di associare correttamente il segnale RF con quello US.
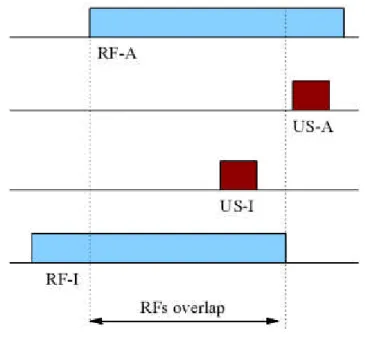
Definendo:
● US-A: impulso ultrasonico diretto proveniente dalla boa A ● US-RA: segnale ultrasonico riflesso proveniente dalla boa A
● RF-I: segnale a radiofrequenza proveniente da I
● US-I: impulso ultrasonico diretto proveniente dalla boa I
Nello scenario presentato in figura, il sistema determina correttamente la distanza temporale di A, dato che l'arrivo di RF-A il sistema si mette subito in ascolto del segnale ultrasonico ed il primo impulso a giungere è proprio A; tutti gli altri impulsi successivi verranno ignorati.
Casi problematici:
1. Ricezione della coppia RF-A, US-RA: la combinazione con un segnale ultrasonico riflesso causa un errore nella stima della distanza da A (questo succede se il segnale US-A non venga mai ricevuto). Un problema del genere in realtà viene risolto attraverso una corretta installazione della boa. D'altronde questo caso risulta molto infrequente, data la proprietà del segnale ultrasonico di essere diffratto, per cui risulta di solito che il segnale diretto sia ricevuto prima del suo eco.
2. Ricezione della coppia RF-A, US-I: questo è il caso di interferenza tra un segnale RF con l'impulso emesso da un altra boa che giunge prima dell'impulso correlato US-A. Poiché un segnale ultrasonico può essere
ricevuto solo da un listener, mentre ancora il corrispondente segnale RF sta per essere ancora ricevuto, anche il corrispondente segnale RF-I è fase di ricezione. Quindi RF-A ed RF-I sono in sovrapposizione. Se RF-A ed RF-I sono uguali in potenza ricevuta, questi collideranno e costringeranno il listener a non considerare l'evento. Se invece RF-I ha potenza maggiore l'evento sarà considerato valido e verrà preso in considerazione il segnale di maggiore potenza.
3. Ricezione della coppia RF-A, US-RI: quest'evento può accadere nel momento in cui un impulso riflesso proveniente da I si presenta prima di US-A, causando un errata stima della distanza da A. Sebbene i casi 2 e 3 possano portare a questa eventualità, l'uso della randomizzazione della trasmissione riduce il ripetersi di tali eventi. D'altronde i listener non usano semplicemente la prima coppia di segnali ricevuti, ma collezionano diversi campioni integrando un ulteriore algoritmo per le interferenze [35].
Le caratteristiche trasmissive del sistema indicano una capacità di copertura di 30 piedi (9,14m) per il segnale US e di 40 piedi (12,192m) per quello RF in ambienti indoor e in presenza di ostacoli.
I listener sono attaccati direttamente ad un nodo di tipo statico o mobile tramite una connessione seriale RS232; ad esempio quando un utente collega un nuovo servizio statico alla rete, come una stampante o un computer, non ha alcun bisogno di definire la sua posizione fisica o qualsiasi altro attributo, ma solamente collegare il listener alla stampante la quale a questo punto è in grado attraverso le boe di conoscere esattamente la propria posizione, informando il software attraverso un'opportuna API (Application Programm Interface) di aggiornare il suo stato di servizio.
Se il dispositivo viene spostato in una nuova stanza, il software di navigazione che gira sul dispositivo stesso usa nuovamente l'API dei listerner per aggiornare la posizione. Le informazioni così ottenute possono, ad esempio, essere inviate ad
server di mappe, il quale provvede ad aggiornare la dislocazione delle periferiche e fornire i risultati tramite interfaccia grafica ad un utente (i servizi attivi appaiono in una mappa su un display sotto forma di icona. Le informazioni sul dispositivo sono inviate sotto forma di stringhe in un canale RF e possono essere modificate dal proprietario del dispositivi inserendo una password di autenticazione. Per questioni di sicurezza la modifica di tali informazioni è permessa solo se si è all'interno della stanza in cui si trova il dispositivo stesso.
3.5 VOR (VHF Omnidirectional Range)
Il VOR è un moderno sistema di posizionamento per la navigazione aerea. Usa il principio della triangolazione visiva, eccetto che i landmark emettono un segnale radio altamente direzionale e rotante (radiofaro o radiobeacon). Gli aerei possono determinare la loro posizione rispetto ad un radiofaro di cui e nota la posizione. Ogni radiofaro trasmette due segnali VHF continuamente su una specifica frequenza, un segnale omnidirezionale attraverso cui il radiofaro è univocamente riconoscibile ed un segnale altamente direzionale che ruota di 360°.
Il segnale inviato indica sia il nome della stazione sia l'angolo esistente tra la
Figura 30: Stazione VORTAC in Germania
stazione e il velivolo che riceve il segnale, indicando quindi al pilota la sua posizione rispetto alla stazione emittente. Confrontando su una mappa la rotta dell'aereo e la sua posizione rispetto al VOR si ottiene la posizione del velivolo. Spesso le stazioni di terra sono dotate anche del DME (Distance Measuring Equipment) che misura la distanza tra l'emittente e il ricevitore. Da un solo radiofaro si è in grado di determinare la rotta. Conoscendo la posizione rispetto a due radiofari si può determinare in maniera assoluta la propria posizione. Quando il segnale viene ricevuto dall'aereo, il segnale viene decodificato, l'angolo trasmesso dal segnale corrisponde all'angolo dell'antenna al momento della trasmissione del segnale per mezzo del quale si codifica la direzione della stazione nel momento in cui il fascio raggiunge il ricevitore. Il VOR divenne il principale sistema di radionavigazione negli anni '60: il vantaggio di questo sistema rispetto ai vecchi NDB (Non-Directional Beacon) è che il segnale radio indica anche se si sta viaggiando verso (to) o dalla (from) stazione emittente, permettendo al pilota di seguire più facilmente una linea immaginaria tracciata nel cielo.
Il tipico strumento del VOR è formato da un disco a bussola (solitamente chiamato compass card) sovrastato da un ago verticale e da un indicatore cosiddetto
Figura 31: La freccia gialla indica se si sta viaggiando verso (To) o
dalla (From) stazione emittente
To/From (da/a). All'esterno del disco c'è una manopola chiamata Omni Bearing
Selector (OBS) che ruota il disco. Tutti gli angoli sono riferiti al nord magnetico per
permettere un facile confronto tra il VOR e la bussola. Il nord magnetico differisce dal nord reale per una quantità detta variazione magnetica, la cui variazione dipende dalla posizione sul globo e può essere trovata nelle carte e negli indici aeronautici.
Se il pilota vuole avvicinarsi a una stazione VOR in direzione est dovrà volare in direzione ovest per raggiungerla. Il pilota pertanto adopererà la regolazione OBS (Omni-Bearing Selector) per ruotare il disco della bussola finchè il disco non recherà il numero 27 (270 gradi) allineato col puntatore in cima al disco. Quando il velivolo intercetterà la radiale a 90 gradi (direzione est della stazione VOR) l'ago sarà centrato e l'indicatore To/From mostrerà "To". Si noti che il pilota imposta il VOR per indicare il reciproco: l'aereo seguirà la radiale dei 90 gradi mentre il VOR indicherà che la rotta per la stazione VOR (indicata con "to") è 270 gradi. Il pilota pertanto dovrà solamente tenere l'ago centrato per seguire la rotta verso la stazione VOR. Se l'ago si sposta fuori centro il pilota vira solidalmente all'ago per ricentrarlo. Dopo aver sorvolato la stazione VOR l'indicatore To/From indicherà "From" e il velivolo si troverà pertanto sulla radiale di 270 gradi. L'ago generalmente oscilla da tutte le parti sorvolando le pertinenze della stazione VOR per poi tornare centrato una volta raggiunta una certa distanza dalla stazione.
Seguire una singola rotta con un VOR è molto più semplice che con un NDB. Con un NDB è possibile sapere solamente la direzione verso la stazione ma non la radiale su cui il velivolo si trova. Questo invero potrebbe sembrare la stessa cosa ma la differenza è che per sorvolare un NDB l'indicatore deve essere centrato sullo strumento, l'esatta posizione dell'aereo rispetto alla stazione è sconosciuta. Per trovare la radiale il puntatore NDB deve trovarsi centrato e di conseguenza riferito alla bussola. Inoltre, man mano che il velivolo si avvicina alla stazione NDB, qualunque vento traverso potrebbe causare uno spostamento rispetto alla rotta effettivamente da seguire. Man mano che il pilota centra l'indicatore l'aereo comincia a seguire un percorso curvo verso la stazione NDB e la sorvola da una direzione differente da quella con cui aveva iniziato ad avvicinarla. La freccia gialla indica se
si sta viaggiando verso (To) o dalla (From) stazione emittente
Quando l'aereo sorvola una stazione VOR entra nel cono di confusione, un cono immaginario dove non è possibile identificare correttamente la radiale (e la distanza per il DME). Una volta che l'aereo ha attraversato quest'area, il VOR indicherà la radiale "From" che starà seguendo in quel momento; il pilota continua pertanto a navigare mantenendo il puntatore centrato nello strumento. Con una stazione NDB invece il puntatore si invertirà istantaneamente appena passata la stazione, e per continuare sulla stessa direzione il pilota dovrà invertire la modalità di tutte le correzioni, cosa solitamente molto difficile.
Correggere la posizione con un VOR comunque non è più semplice che con un NDB. In entrambi i casi due stazioni devono essere sintonizzate e le loro direzioni trovate e tracciate su un grafico. Il VOR tuttavia offre una maggiore accuratezza data la natura del suo segnale ma potrebbero essere necessari leggeri aggiustamenti della manopola OBS per trovare la direzione effettiva della stazione.
Navigare lungo linee tra diverse stazioni, sia da che verso, rimane comunque un difficile problema per entrambi i sistemi. In questo caso le radiali cambiano man mano che l'aereo si sposta, e l'unica maniera di fare questa cosa manualmente è di tracciare la rotta e degli aggiustamenti di esempio prima del volo. Errori nella navigazione possono essere veramente difficili da correggere e possono richiedere aggiustamenti che devono essere confrontati con quelli d'esempio tracciati prima del volo.
L'elettronica può risolvere questo problema e il sistema Area Navigation (RNAV) può farlo in maniera molto efficace. Un sistema RNAV è un computer analogico collegato a più ricevitori VOR che può utilizzare i dati del VOR e del DME per calcolare continuamente l'aggiustamento della rotta. I percorsi di volo possono essere selezionati in base alla volontà del pilota e l'elettronica calcolerà continuamente la direzione necessaria per stare entro il percorso, come se il velivolo stesse volando lungo una radiale.
L'accuratezza prevedibile di un VOR è di ±1.4°; comunque i dati indicato che nel 99.94% dei casi l'errore è meno di ±0.35°. Le stazioni hanno dei sistemi di controllo che automaticamente segnalano o rendono inoperativo l'impianto nel caso l'errore sia maggiore di ±1°.
Le stazioni VOR sono in ogni caso dotate di apparecchiature di controllo che automaticamente intervengono a segnalare, ed eventualmente rendere in operativo, l’impianto che dovesse manifestare uno scostamento dalle tolleranze previste dall’Annesso 10 ICAO.
3.6 LORAN (LOng RAnge Navigation)
Il sistema LORAN (LOng RAnge Navigation) è un sistema di navigazione terrestre che usa tre o più trasmettitori radio a bassa frequenza per determinare la posizione di navi o aerei, calcolando l'intervallo di tempo che intercorre tra i vari istanti in cui giungono i segnali al ricevitore. Prima che il sistema GPS diventasse molto diffuso, è stato il sistema più usato nelle applicazioni marittime. La versione attuale del LORAN, comunemente usata, è il LORAN-C che opera alle frequenze da 90 a 110Khz e con una potenza compresa tra 100 kilowatt e 4 megawatt.
Il LORAN è stato sviluppato dagli Americani ed è una evoluzione del British
GEE radio Navigation System. Mentre il GEE aveva un range di circa 400 miglia
(644 km), inizialmente il LORAN aveva un range di 1,200 miglia (1,930 km). Tale sistema fu pienamente funzionante durante la Seconda Guerra Mondiale e usato in maniera intensiva dalla Marina degli Stati Uniti d'America e dalla Royal Navy inglese. Originariamente era conosciuto con il nome di "LRN" che sta per: Loomis Radio Navigation, dopo che il fisico milionario Alfred Lee Loomis, che inventò il LORAN, giocò un ruolo cruciale nella campo della ricerca e sviluppo militare della Seconda Guerra Mondiale.
La il sistema di navigazione basato sul LORAN si basa, come già detto, sul principio del TDOA di due segnali provenienti da una coppia di trasmettitori. Il metodo è quello della Multilaterazione, già discusso nel secondo capitolo. Il luogo dei punti a differenza di tempo costante (LOP line of position) tra due segnali provenienti da due stazioni radio, da origine ad un iperboloide. Se le posizioni delle due stazioni radio sincronizzate sono note, la posizione del ricevitore può essere determinata su una delle curve a differenza costante di tempo. Utilizzando ulteriori coppie di trasmettitori, la posizione del ricevitore viene definita in maniera univoca dall'intersezione di più iperboloidi di posizione.
Nella pratica, il LORAN è costituito da un array di trasmettitori coordinati tra loro detti anche chains o catene, che sono costituiti da una stazione master e da almeno due (ma spesso più) stazioni secondarie caratterizzate da un unico un gruppo di intervalli di ripetizione (GRI group repetition interval, sempre multiplo di 100 microsecondi), definito in microsecondi. Il master trasmette una serie di impulsi intervallati da una pausa, mentre le stazioni secondarie li ricevono, quindi attendono un certo intervallo di tempo di alcuni millisecondi (secondary coding delay) prima di trasmettere un segnale di risposta. Per ogni catena di secondary coding delay è differente, permettendo di identificare i segnali secondari in maniera univoca.
3.7 GPS (Global Positioning System)
Il Global Positioning System (abbreviato in GPS, a sua volta abbreviazione di NAVSTAR GPS, acronimo di NAVigation System with Time And Ranging Global Positioning System), è un sistema satellitare a copertura globale e continua gestito dal dipartimento della difesa (Departement of Defence, DoD) statunitense. Infatti nel 1991 gli USA avevano aperto al mondo il servizio con il nome SPS (Standard Positioning System), ma differenziato da quello militare denominato PPS (Precision Positioning System). In pratica veniva introdotta la SA (Selective Availability) che introduceva nei segnali satellitari degli errori intenzionali. Il GPS è stato creato a sostituzione del precedente sistema, il Transit, quando gli USA hanno rinunciato alla Selective Availability ed hanno reso il primo sistema accurato quanto il secondo, ed è supportato da un sistema di 24 satelliti artificiali. Il principio di funzionamento si basa su un metodo di posizionamento sferico, che consiste nel misurare il tempo impiegato dal segnale a percorrere la distanza satellite-ricevitore. Conoscendo l'esatta posizione di almeno 3 satelliti per avere una posizione 2D (bidimensionale) e 4 per avere una posizione 3D (tridimensionale) ed il tempo impiegato dal segnale per giungere al ricevitore, è possibile determinare la posizione nello spazio del ricevitore stesso. L'idea di base: i satelliti trasmettono costantemente la loro posizione all'interno di un'orbita predicibile, osservata e opportunamente corretta. Il ricevitore calcola la differenza di fase tra i segnali ricevuti per calcolare la sua posizione basandosi sul ritardo di propagazione del segnale. Il GPS è stato inizialmente progettato per scopi militari, ma fin da subito sono apparse evidenti le potenzialità per uso anche civile. Fino al maggio 2000, il segnale per uso civile veniva degradato per ridurre la precisione attraverso la Selective Available (SA), consentendo precisioni nell'ordine di 100-150 m. Da quella data, invece, per decreto del Presidente degli Stati Uniti Bill Clinton, è stata disabilitata la degradazione del segnale, consentendo la precisione attuale di circa 10-20 m. Nei modelli per uso civile è presente un dispositivo che inibisce il funzionamento ad altezze e velocità superiori a certi valori, per impedirne il montaggio su missili improvvisati.
Possibili errori: errori di bias dovuti alla non corretta sincronizzazione temporale dei satelliti. Soluzione ai possibili errori: uso di orologi atomici interni, aggiunta di un ulteriore satellite per il computo della posizione, uso del GPS differenziale (dei ricevitori in posizioni note ricevono il segnale GPS calcolano la loro posizione e la confrontano con quella vera per determinare l'errore e trasmetterlo a tutti i ricevitori GPS presenti nella stessa area).
Il sistema GPS non viene usato come sistema di localizzazione indoor.
3.8 Pinpoint 3D-ID
Sistema di localizzazione prodotto dalla compagnia americana Pinpoint Co. [40]. Il sistema 3D-ID LPS viene impiegato attualmente per localizzare, tracciare e monitorare persone e attrezzature in ambienti interni come ospedali, industrie e magazzini. La tecnologia impiegata usa tecniche di posizionamento globale simile a quello impiegato nei sistemi di reti satellitari GPS. Il sistema prevede un largo uso di TAGS interni e l'uso di radio frequenze che dovranno essere economici e resi univoci da un ID, (RFID). I TAGS sono visibile attraverso l'infrastruttura pareti, porte. Occorre che il sistema conosca l'infrastruttura dell'ambiente e la posizione dei singoli TAGS all'interno di esso. Comparato con il sistema GPS dove il sistema non conosce l'ambiente in cui si trova, qui sono i TAGS a conoscere dove si trovano.
Il sistema soffre degli stessi errori di bias del sistema GPS per risolvere i quali vengono usati segnali di test o sottraendo come quantità fissa il ritardo del sistema al time of flight. Altri problemi sono la granularità: il sistema è tanto più preciso quanto più lo spazio viene frazionato. La frequenza del tag può dipendere dall'inerzialità del sistema.
Dettagli sul funzionamento: l'area da monitorare è suddivisa in celle ciascuna monitorata da un controller con antenna. L'oggetto che deve essere monitorato deve essere in grado di poter trasmettere ad una LAN Wireless.
Il sistema usa dei piccoli TAGS fissati su gli oggetti o persone da monitorare. I TAGS inviano un segnale a radiofrequenza ad antenne montate all'interno dell'edificio. L'unità di controllo all'interno della cella e all'interno delle pareti traducono le informazioni in dati di posizione e inviano il tutto tramite una rete di computer all'utente finale o ad una unità centrale. I datasheet di questo sistema riporta un'accuratezza di 1.3m.
3.9 Active Bats
Nato da uno studio di ricerca nella ORL-cum-AT&T con lo scopo di creare un
sistema LPS simile al PinPoint ma più precisi. In questo caso i TAGS hanno ricevitori RF e trasduttori ultrasonici. L'interrogatore è dotato di radio trasmittente e “microfoni” (ricevitori ultrasonici). L'interrogatore invia il segnale di inizio trasmissione tramite RF, mentre il tag riceve l'ordine e invia un impulso ultrasonico. L'interrogatore misura il tempo di volo che intercorre dall'ordine di trasmissione al momento della ricezione dell'impulso ultrasonico determinando, dalla conoscenza della velocità delle onde sonore (344m/s) e il TOF misurato, la distanza dal tag selezionato, usando poi il metodo della triangolazione. Il sistema risulta molto più accurato del PinPoint infatti unisce un sistema di trasmissione veloce ( segnale RF ) ad uno lento ( segnale sonoro ). Questo riduce gli errori percentuali della misura infatti poiché la velocità della luce è 300M m/s (30m/0.1μs) mentre per utilizzando la propagazione sonora e ammessa una risoluzione temporale di 0.1μs (in cui una propagazione elettromagnetica percorrerebbe 30m), si ottiene una risoluzione spaziali di 0.1μs * 344m/s = 0.0000344m. Come nel PinPoint, per correggere gli errori vengono sommati i ritardi del sistema calcolati per via empirica. Problemi tipici: ricezione di echi ( stesso problema in campo audio della Multipath interference).
Metodi euristici per eliminare il problema degli echi:
● La distanza misurata tra 2 istanti diversi non può essere più grande della
distanza di 2 microfoni.
● Uso di test statistici per determinare problemi di deviazione, ripetuti finché la varianza non diventa molto piccola.
Le specifiche tecniche indicano delle dimensioni di 8.0 x 4.1 x 1.8 cm per il bat, l'uso di 48 bit per codificare l'ID univoco, una pila di AA la litio, processore DSP per le elaborazioni, un'accuratezza di circa 3cm.
Il sistema usa una rete wireless per inviare comandi e generare un feedback sui bat. I bat possono trasmettere lo stato delle batterie e il numero di versione del firmware.
3.10 RFID Tags
L'RFID (Radio Frequency Identification) è l'ultima tecnologia nell'ambito degli automatismi industriali, in particolare nel campo dell'AIDC (Automatic Identification Data Collection), ed è in rapida crescita.
L'RFID può essere associato in maniera semplicistica ad una bar code applicata su merci ed oggetti da tracciare, ma in realtà presenta degli aspetti che ne accrescono gli usi e permettono di superare evidenti limitazione dei semplici codici a barre. Infatti mentre una bar code ha necessità di un dispositivo ottico per la lettura che sia in contatto diretto con essa, i tag RFID sono svincolati dall'essere in linea diretta con il lettore. Inoltre la tecnologia permette la trasmissione dei dati sia in lettura che in scrittura e senza connessioni fisiche, così che si possano modificare i dati codificati nel tag in corso d'opera. Un altro particolare vantaggio rispetto ai codici a barre è il fatto che un solo lettore può leggere il contenuto di più tag contemporaneamente. I costi sono comunque paragonabili.
Alcune stime della Allied Business Intelligence parlano di aspettative di crescita da 323 milioni di unità nel 2002 ad alcuni miliardi nel 2007.
I sistemi basati su RFID sono usati in molti campi applicativi per l'industria come pedaggi autostradali, pagamenti automatizzati, cancelli automatici,gestione
automatica del magazzino, accessi di sicurezza. Alcuni applicazioni particolari riguardano l'inserimento di questi tag nei lacci da scarpe dei corridori per segnalare l'istante esatto in cui questi attraversano la linea di traguardo.
Un tag RFID dal punto di vista implementativo è costituito da un IC collegano ad una antenna, tipicamente incisa direttamente sul supporto plastico in genere sfessibile, come mostrato nella figura precedente. Il tag può essere di varie dimensioni ma i più piccoli possono arrivare alle dimensioni di un chicco di riso e possono essere sia di tipo passivo (ossia non hanno alcuna batteria per l'alimentazione) o attivo (dotati di batteria). Inoltre si possono distinguere in
read-only o read-write oppure con caratteristiche miste, ossia permettono che ad esempio
un numero seriale sia di sola lettura, mentre altri dati possono essere modificati. Le informazioni contenute in nel chip del tag vengono trasmesse attraverso un segnale a radiofrequenza. Nei sistemi di tipo passivo il lettore RFID genera un campo elettromagnetico in grado di fornire l'energia necessaria al circuito passivo di “svegliarsi”, fornendo l'energia necessaria alla sua alimentazione. Una volta alimentato il tag trasmette automaticamente le informazioni contenute al suo interno. Nei sistemi attivi invece sono dotati di una batteria, tali sistemi generano una trasmissione periodica ma continua, cioè funzionano come radiofari così che le informazioni inviate possano essere catturate dai lettori distribuiti all'interno di una fabbrica. Alcuni tag supportano anche algoritmi di codifica dei dati per assicurare la sicurezza e l'integrità della trasmissione durante il transito al lettore.
I lettori possono essere integrati con PC portatili o fissati e posizionati strategicamente in punti chiave, come ad esempio all'ingresso di un edificio, lungo le linee di una catena di assemblaggio. I lettori sono a loro volta collegati tramite una rete WLAN (Wireless local area network) con un host, incaricato di gestire i dati raccolti.
Alcune caratteristiche tecniche dei tag passivi:
● RFID Low Frequency: operano a 125KHz con una massima distanza
raggiungibile di 508mm
● RFID High Frequency: operano a 13.56MHz con una massima distanza raggiungibile di 1m
● RFID Ultra-High Frequency: frequenze di funzionamento di 868MHz, 915MHz o 2.45GHz. Distanze raggiungibili che vanno da 1 a 3m, in particolare se operanti a 915MHz possono raggiungere i 6m o più.
I tag RFID High e Ultra-High Frequency spesso sono riferiti con il nome di “Smart Labels” o “Inlays”.
Il grande vantaggio di questi dispositivi è che possono essere posizionati anche
internamente all'oggetto da tracciare ad esempio all'interno della scatola di prodotto, escluso contenitori di metallo. Nel caso di oggetti metallici, i contenitori vengono modificati appositamente per minimizzare le interferenze sul segnale.
Le Smart Label sono così chiamate per la loro proprietà di essere flessibili, similmente ad una etichetta adesiva. In molti casi i tag sono programmabili o aggiornabili sul campo, così che la stessa etichetta possa essere riutilizzata molte volte e per diversi scopi.
Alcuni produttori di chip RFID sono Philips Semiconductor, Texas Instrumens e Zebra Tecnologies. Diversi prodotti della Zebra come R-140 e R402 sono dotati anche di una superficie stampabile su cui applicare codici a barre o qualsiasi altra informazione che si voglia rendere immediatamente visibile ad occhio umano.
Un applicazione tipica nel campo della localizzazione spaziale riguarda la gestione dei magazzini. Un sistema basato su RFID è in grado automaticamente di gestire le quantità di merci in stoccaggio, attivare immediatamente l'ordinazione di nuova merce quando le scorte diminuiscono, rilevare la posizione di un determinato prodotto negli scaffali, avvisare un operatore nel caso queste siano posizionate in posti sbagliati.
In campo farmaceutico sono di grande aiuto per i ciechi e i disabili nell'identificazione del contenuto presente all'interno di una scatola di medicinali: all'interno dei chip vengono codificati sia il contenuto che le istruzioni per i dosaggi.
Sempre nell'ambito dell'assistenza sanitaria esistono polsini in grado di tracciare spostamenti non autorizzati dei pazienti all'interno di un'area ospedaliera o garantire che un bambino sia avvicinato solo dai propri genitori.
3.11 Attenuazione del segnale
Altre classi di sistemi di localizzazione, che misurano la distanza del target da riferimenti spaziali, sfruttano la misura dell'attenuazione del campo originale generato dalla sorgente15 (Signal Fading). In questo caso il campo può essere di tipo
magnetico (Flock of Birds,Polaris 3 space tracker), campo RF, pressorio ( onde sonore).
Sulla misura dell'attenuazione del campo RF si basano sistemi attualmente in uso [41]. Il problema fondamentale nell'utilizzo di questo metodo in ambienti chiusi è che si incontrano molte difficoltà nella modellizzazione della propagazione indoor. L'attenuazione è non lineare.
É possibile misurare l'attenuazione audio indoor utilizzando la misura del volume per determinare la distanza dalla sorgente stessa. Si incontrano anche qui gli stessi problemi del caso dell'attenuazione del segnale RF, tuttavia non esistono allo stato attuale dispositivi che usino questo approccio.
3.12 Flock of Birds
Il sistema permette di misurare non solo la posizione in uno spazio 3D ma anche l'orientamento [41]. Consiste in un grosso trasmettitore connesso tramite interfaccia RS232 ad un host computer ed alcuni piccoli ricevitori connessi a dei sensori e ad un controller. I sensori, dotati di tre avvolgimenti induttivi normali tra loro, misurano le componenti ortogonali del campo magnetico generato dal trasmettitore, in questo modo è possibile determinare la posizione fisica del sensore stesso nello spazio.
Si riportano di seguito alcune caratteristiche del dispositivo:
La copertura di ampi range viene ottenuta aggiungendo un Extended Range Tramsmitter (ERT/ERC).
Applicazioni attuali del dispositivo:
● Head/Hand/Instrument Body Tracking
● Virtual reality ● Flight simulation ● Scientific visualization ● Medical Imaging ● Entertainment
● Biomechanical/Human Factors Analysis
● Rehabilitative Feedback & Assessment
● 3D Graphics Control & Manipulation