FACOLTÀ DI INGEGNERIA
DIPARTIMENTO DI INGEGNERIA AEROSPAZIALE
R
ELAZIONEPERILCONSEGUIMENTODELLALAUREA INI
NGEGNERIAA
EROSPAZIALE“Progetto e sviluppo di un simulatore per rendez-vous orbitale”
CANDIDATO
_________________________
Alessio Paoletti
Anno Accademico 2005-2006
RELATORI:
Prof.re Giovanni Mengali
Prof.re Eugenio Denti
Prof.re Roberto Galatolo
Dott.sa Simona De Sanctis
Dedicato
a mio padre
Sommario
Il presente lavoro riguardaun simulatore della fase intermedia e terminale di rendez-vous orbitale e si colloca nell’ ambito dello studio ESA HARVD (Integrated
Multi-Range RDV Control System, ovvero lo studio per la realizzazione di un sistema di
controllo per il rendez-vous) e in particolar modo nell’ambito di AMM (Autonomous
Mission Management, ovvero il sottosistema che consente al veicolo di gestire
autonomamente la missione) competenza di Alcatel Alenia Space-Torino. Lo scopo è supportare la pianificazione di prima approssimazione della traiettoria. Il programma, sviluppato in MATLAB ® , permette di simulare il moto relativo di due satelliti in orbita circolare/ellittica, tralasciando le perturbazioni agenti su di essi. Esso deve infatti permettere all’utente di sperimentare velocemente diverse strategie, ad esempio concatenando differenti tipi di manovra e valutandone il consumo di propellente. Il simulatore consente inoltre di dare una valutazione di prima approssimazione delle deviazioni provocate da eventuali anomalie. Il funzionamento si basa sull’integrazione numerica delle equazioni del moto relativo (Hill/Clohessy-Wiltshire), che consente la generazione della traiettoria del satellite inseguitore rispetto all’obiettivo. Le singole manovre vengono simulate inserendo nell’integrazione le forzanti ricavate dalla soluzione in forma chiusa delle equazioni del moto, disponibili sia per il caso di orbita circolare che di orbita ellittica (equazioni di Koji-Yamanaka). La valutazione del propellente necessario è stata operata tramite l’equazione di Tsiolkowsky.
Per la convalidazione del programma sono stati utilizzati dati sperimentali disponibili presso Alcatel Alenia Space, relativi a manovre su orbite circolari. La trattazione delle orbite ellittiche costituisce invece un’innovazione e pertanto, non esistendo dati sperimentali, si è dovuto operare tramite verifica indiretta; se al termine della manovra il satellite raggiunge la posizione di arrivo richiesta con la velocità voluta, ciò è indice del fatto che gli impulsi e le accelerazioni inseriti come forzanti, sono stati calcolati correttamente.
Infine il simulatore è stato applicato alla missione MSR (Mars Sample Return) simulando un rendez-vous ellittico e una CAM (Collision Avoidance Manoeuvre).
Indice
Sommario
i
Capitolo 1. Introduzione generale
1
1.1 Gli obiettivi della tesi
1 1.2 Modelli fisici di riferimento
2 1.3 La simulazione
2 1.4 Applicazioni del simulatore
4
Capitolo 2. Lo studio HARVD e la missione MSR
5
2.1 Introduzione 5 2.2 Lo studio HARVD 6 2.2.1 Scenari di missione 6 2.2.2 GNC 7 2.2.3 AMM 8 2.2.4 CAM 10 2.2.5 FDIR 11 2.3 Mars Sample Return12
Capitolo 3. Modelli fisici di riferimento
15
3.1 Introduzione
15 3.2 Sistemi di riferimento e di coordinate utilizzati
16
3.3 Le equazioni di Hill e di Clohessy-Wiltshire
18 3.4 Le equazioni di Koji-Yamanaka 21 3.5 L’ equazione di Tsiolkowsky 24
Capitolo 4. Le manovre
25
4.1 Introduzione 25 4.2 Descrizione delle manovre
25 4.2.1 Trasferimento impulsivo fra due punti
27
4.2.2 Hopping impulsivo radiale
28 4.2.3 Hopping continuo radiale
29 4.2.4 Fly around
29 4.2.5 Forced motion
30 4.2.6 Trasferimento alla Hohmann
4.3 Calcolo delle forzanti
36 4.3.1 Le orbite circolari
36 4.3.1.1 Trasferimento impulsivo fra due punti
36
4.3.1.2 Hopping impulsivo radiale
39 4.3.1.3 Hopping continuo radiale
41 4.3.1.4 Fly around
42 4.3.1.5 Forced motion
45 4.3.1.6 Trasferimento alla Hohmann
48 4.3.2 Le orbite ellittiche
49 4.3.2.1 Trasferimento ellittico impulsivo fra due punti
49
4.3.2.2 Hopping ellittico impulsivo radiale
53
4.3.2.3 Hopping ellittico continuo radiale
54
4.3.2.4 Fly around ellittico
55 4.3.2.5 Forced motion ellittico
57
Capitolo 5. L’architettura del simulatore
58
5.1 La struttura generale 58 5.2 Gli input 61 5.2.1 Input di missione 62 5.2.2 Input di manovra 62 5.2.3 Simulazione di anomalie 64 5.4 Gli output 65
Capitolo 6. La validazione del simulatore
67
6.1 MIV 67 6.2 SVS 68 6.2.1 PLANNER 69 6.3 Validazione in orbita circolare
70 6.4 Validazione in orbita ellittica
72
Capitolo 7. I risultati
76
7.1 Rendez vous su orbita ellittica intorno a Marte
77 7.1.1 Dati di ingresso 77 7.1.2 La fase terminale 77 7.2 Rischio di collisione 88
Capitolo 8. Conclusioni e possibili sviluppi futuri
96
Appendice A. Trasformazioni di coordinate
A.1 Da coordinate LVLH a coordinate TOCS
98 A.2 Da coordinate TOCS a coordinate LVLH
100
Appendice B. La velocità massima del forced motion
101
Appendice C. Tabelle della funzione ellittica
103
Bibliografia
107
Elenco delle tabelle
108
Elenco delle figure
110
Elenco degli acronimi
112
Elenco dei simboli
113
Ringraziamenti
Capitolo 1
Introduzione generale
1.1 Gli obiettivi della tesi
Il rendez vous orbitale coinvolge due oggetti orbitanti intorno ad un corpo celeste, ovvero un inseguitore denominato chaser e un obiettivo denominato target. Lo scopo è che il chaser vada ad occupare la medesima posizione del target con velocità relativa nulla.
Il presente lavoro è dedicato alla descrizione del progetto e dello sviluppo di un simulatore specifico per le manovre della fase intermedia e terminale del rendez-vous orbitale. Lo strumento realizzato deve in particolar modo supportare la pianificazione di prima approssimazione della traiettoria eseguita dal chaser (satellite inseguitore).
La prima parte del lavoro (capitolo1) è dedicata alla contestualizzazione del simulatore realizzato, quindi alla descrizione dello studio ESA-HARVD ed alla definizione degli aspetti in esso trattati. In particolare viene posta attenzione sul sottosistema AMM, di competenza di Alcatel Alenia Space-Torino. Esso ha il compito di conferire al veicolo spaziale la capacità di autogestirsi (autonomia), decidendo autonomamente se e come modificare la missione nominale. Per soddisfare le richieste ESA di semplicità realizzativa, è stato deciso di precaricare a bordo una serie di missioni pianificate a terra, cercando di coprire l’intera casistica di problemi riscontrabili durante la missione. Nel caso in cui il veicolo spaziale abbia un problema in assenza di comunicazione con terra, AMM selezionerà il piano di missione più appropriato tra quelli a disposizione. Il presente simulatore è stato realizzato per supportare le attività di preparazione dei piani alternativi che dovranno essere utilizzati.
Oltre che nella realizzazione di AMM, Alcatel Alenia Space è impegnata nella missione di Mars Sample Return (MSR), scelta tra l’altro come riferimento dallo studio HARVD. In MSR viene trattato il problema del rendez-vous ellittico e costituisce perciò un valido campo di applicazione per il suddetto simulatore.
1.2 Modelli fisici di riferimento
Il programma si basa sui seguenti modelli fisici:
• Equazioni del moto relativo in forma differenziale e risoluzione in forma chiusa relativa al caso delle orbite circolari (Hill/Clohessy-Wiltshire).
• Risoluzione in forma chiusa delle equazioni del moto relativo generalizzate al caso di orbita ellittica (Koji-Yamanaka).
• Equazione per il calcolo della massa di carburante necessaria alla generazione di una determinata variazione di velocità (Tsiolkowsky)
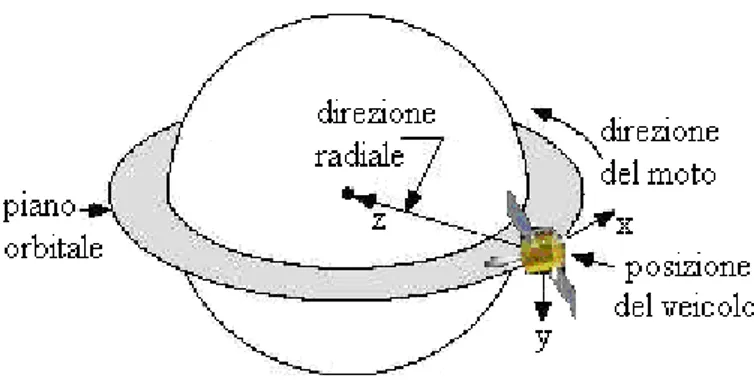
Il riferimento utilizzato è il sistema LVLH (Local Vertica Local Horizontal) centrato nel target con asse x tangente alla traiettoria e direzionato nello stesso senso del moto, asse z giacente sul piano orbitale e diretto verso il centro di gravità, asse y disposto in modo tale da formare una terna levogira (vedi figura 3.1).
1.3 La simulazione
Il programma genera la traiettoria relativa del chaser rispetto al target tramite l’integrazione delle equazioni di Hill. Di seguito è riportata la forma matriciale del sistema utilizzato nel programma.
F
X
A
+
−
−
+
=
0
*
/r
g
2
0
0
2
1
0
0
0
0
0
0
0
0
*
/r
g
-0
0
0
0
1
0
0
0
2
0
0
0
)
*
/r
(-g
0
0
0
0
1
0
T 2 T 2 Tω
ω
ω
ω
ω
ω
A
=
z
z
y
y
x
x
X
,
=
z y xa
a
a
F
0
0
0
Sviluppando la relazione matriciale (1.1) si riottengono le equazioni di Hill. Gli elementi contenuti in (1.1) sono di seguito definiti:
=
X
Componenti x,y,z di posizione e velocità relativa al target del chaser.F
= Componenti x,y,z dell’accelerazione dovuta a forze esterne applicate sul chaser.=
Tg
Accelerazione di gravità agente sul target.=
*
r
Distanza dei due satelliti dal centro di gravità.=
ω
Velocità angolare del target.=
ω
Accelerazione angolare del target.F viene utilizzato sia nel caso di manovre continue che in quello di manovre impulsive.
In quest’ultimo caso l’impulso viene simulato ipotizzando un’accelerazione di un secondo. Variando opportunamente le componenti e gli istanti di applicazione di F si ottengono tutte le tipologie di manovra.
Il calcolo delle forzanti avviene secondo il seguente criterio:
• Se l’orbita è circolare si utilizzano le equazioni di Clohessy-Wiltshire (soluzioni in forma chiusa).
• Se l’orbita è ellittica si utilizzano le equazioni di Koji-Yamanaka.
Gli impulsi di velocità/accelerazione ottenute consentiranno di valutare la massa di carburante necessaria. Il programma permette inoltre di modificare parte degli input e dei dati calcolati dal programma, simulando in questo modo eventuali anomalie (capitolo 5) e le conseguenti deviazioni dal caso nominale.
1.4 Applicazioni del simulatore
Il simulatore realizzato è stato testato ipotizzando di lavorare nello scenario corrispondente alla missione di Mars Sample Return. In particolar modo sono state eseguite le seguenti simulazioni:
• Fase terminale di un rendez vous ellittico intorno a Marte: In questo caso il
simulatore è stato applicato col solo intento di verificarne le potenzialità, a tale scopo è stata simulata una sequenza composta da manovre sia continue che impulsive.
• Collision Avoidance Manoeuvre: Questa particolare manovra è stata affrontata
per spiegare come utilizzare il programma nel caso si voglia simulare un’anomalia e la conseguente strategia di recupero.
Capitolo 2
Lo studio HARVD e la missione MSR
2.1 Introduzione
Questa prima parte è dedicata alla descrizione dello studio ESA-HARVD [1] e alla definizione degli aspetti in esso trattati. In particolare viene posta attenzione sul sottosistema AMM [1]. Esso ha il compito di conferire al veicolo spaziale la capacità di autogestirsi (autonomia), decidendo autonomamente come modificare la missione nominale. Il motivo che porta alla realizzazione di AMM è quello di garantire maggior sicurezza nell’esecuzione delle operazioni, consentendo al veicolo di gestirsi al meglio, anche se in presenza di difficoltà comunicative con Terra. Per soddisfare le richieste ESA di semplicità realizzativa, è stato deciso di precaricare a bordo una serie di missioni preparate a terra, cercando di coprire l’intera casistica di problemi riscontrabili durante la missione. Nel caso in cui il veicolo spaziale abbia un problema AMM selezionerà il piano di missione più appropriato tra quelli a disposizione.
Oltre che nella realizzazione di AMM, Alcatel Alenia Space è impegnata nella missione di Mars Sample Return (MSR), scelta tra l’altro come riferimento dallo studio HARVD. In MSR viene trattato il problema di un eventuale rendez-vous ellittico come caso di emergenza (mancata circolarizzazione dell’orbita del target).
In conclusione il presente simulatore ha il compito di supportare la preparazione dei piani alternativi da precaricare per AMM e al contempo la pianificazione della missione per rendez-vous ellittico intorno a Marte.
2.2 Lo studio HARVD
Nell’ambito dello studio HARVD (Integrated Multi-Range RDV Control System) condotto da ESA, l’obiettivo è la realizzazione di un sistema di controllo del rendez vous orbitale. Il rendez vous orbitale è quella manovra che coinvolge due oggetti orbitanti intorno ad un corpo celeste, ovvero un inseguitore denominato chaser e un obiettivo denominato target. Lo scopo è che il chaser vada ad occupare la medesima posizione del target con velocità relativa nulla.
Il sistema è concepito per gestire due differenti tipi di rendezvous rispettivamente denominati planetary sample return e low earth orbit sevicing. Il primo tipo si applica all’orbita di un generico corpo celeste e lo scopo è agganciare il target per entrare in possesso del campione di terra in esso contenuto. Il secondo tipo viene invece attuato su orbita bassa intorno alla Terra allo scopo di recare servizio ai satelliti orbitanti. Gli argomenti discussi nell’ambito di HARVD sono di seguito elencati.
• Scenari di missione
• GNC (Guidance, Navigation and Control)
• AMM (Autonomous Mission and vehicle Management)
• FDIR (Failure Detection and Isolation Recovery)
AAS-I (Alcatel Alenia Space Italia) è incaricata di studiare e progettare il sottosistema composto da AMM e FDIR e pertanto tali argomenti verranno trattati con maggior precisione rispetto agli altri.
2.2.1 Scenari di missione
La definizione degli scenari scelti per il sistema è di fondamentale importanza per la completa comprensione del lavoro svolto. Per ogni tipo di scenario è stata scelta e analizzata una missione di riferimento allo scopo di supportare e convalidare il progetto
del sistema. In particolare, per quanto riguarda il planetary sample return sono stati studiati due casi differenti. Per ognuno di essi è stato esaminato almeno uno scenario.
1) Nel primo caso viene esaminato il rendez-vous tra due veicoli spaziali intorno ad un generico corpo celeste dotato di elevato campo gravitazionale (grandi lune o pianeti). Lo scenario scelto prevede che il chaser vada ad agganciarsi al target su un’ orbita intorno a Marte. La missione di riferimento scelta è MSR (Mars Sample Return) e verrà descritta nei prossimi paragrafi.
2) Nel secondo è stato esaminato il caso nel quale sussiste un unico veicolo, che dovrà andare ad operare un rendez-vous con un corpo celeste. Al contrario del caso precedente i corpi celesti considerati hanno un campo gravitazionale molto più debole, trattasi infatti di piccole lune. Questa restrizione sull’intensità dei campi gravitazionali, va ad incontrare l’esigenza di operare missioni con costi relativamente bassi in termini di ΔV. Questi gli scenari esaminati:
a) Sample Return Mission sulle lune di Marte: Phoibos e Deimos.
b) Sample Return Mission su asteroidi
Per quanto riguarda il low earth orbit servicing lo scenario prevede un rendez vous tra due veicoli spaziali in orbita bassa intorno alla Terra. La missione di riferimento scelta è IBDM demo mission. In ogni caso tutte le fasi del rendez vous devono essere simulate e convalidate.
2.2.2 GNC
La gestione della traiettoria del veicolo spaziale avviene tramite un sottosistema denominato GNC. Esso si suddivide in tre moduli di seguito definiti.
• Guidance: questo modulo si occupa di determinare la traiettoria desiderata, e il conseguente valore delle forze da applicare al veicolo spaziale in open loop.
• Navigation: questo modulo ha il compito di stimare posizioni , velocità e assetti del veicolo a partire dai dati misurati dai sensori.
• Control: questo modulo utilizza i risultati di guidance (traiettoria desiderata)e navigation (traiettoria misurata) come input , e permette di utilizzare gli attuatori nel modo più appropriato per l’ottenimento della traiettoria desiderata.
2.2.3 AMM
La missione è suddivisa in task, ovvero insiemi di attività che prevedono obbiettivi intermedi (ES: trasferimento alla Hohmann). Col termine attività si intendono, i comandi a singole unità (ES: sensori, attuatori, etc.) o l’ attivazione di un modo operativo di un singolo sottosistema. Nel caso in cui un’anomalia impedisca al veicolo di seguire la missione nominale, sarà necessaria una ripianificazione. In caso di missioni attorno a Marte ad esempio,sarà impossibile intervenire tempestivamente da terra. La soluzione di questo problema è costituita dall’AMM. La sigla AMM significa gestione autonoma della missione e del veicolo, laddove per autonomia si intende la capacità del veicolo spaziale di autogestirsi.
Esso è infatti il gestore a bordo delle attività contenute nel piano di missione, ed ha il compito di provvedere ad eventuali ripianificazioni nel momento in cui non sia possibile intervenire da terra. La ripianificazione è intesa come variazione apportata alla sequenza nominale di attività. Sono identificabili tre differenti livelli di autonomia, e conseguentemente altrettante tipologie di AMM
• Livello 1: Esecuzione e monitoraggio di piani predefiniti. Si basa
lasciata alcun tipo di autonomia, se non la facoltà di interrompere la manovra corrente in caso di guasto o di comandare, se necessario, una CAM (Collision
Avoidance Manoeuvre), ovvero un piano precaricato apposito per evitare la
collisione fra il chaser e un oggetto generico. Gli interventi da terra sono necessari per caricare e iniziare i piani.
• Livello 2: Esecuzione/monitoraggio e limitata ripianificazione in caso di
dispersione/guasto, per esempio l’autonoma selezione fra varie opzioni di piani di recupero dopo un guasto o dopo una CAM, o ancora la capacità di eseguire i comandi non solo in rigida sequenza temporale ma anche nel modo più opportuno a seconda degli eventi.
• Livello 3: Autonoma ripianificazione. Il livello tre “sposta” a bordo la capacità
di generare, selezionare ed eseguire piani per il raggiungimento dell’obbiettivo richiesto a terra.
Il grado di autonomia riferito al livello uno non sempre risponde ai requisiti di determinate missioni, in un rendez-vous con obbiettivo non cooperativo, fuori dalla finestra di visibilità e/o con elevati ritardi nella comunicazione con terra e non sarebbe sufficiente a garantire il successo dell’operazione. Al contrario, un elevato livello di autonomia (livello tre) potrebbe risultare inadeguato in termini di costi computazionali. Il livello scelto ed esaminato per lo studio è il due, ovvero AMM dovrà gestire dei piani precaricati da terra, richiamandoli opportunamente a fronte di esigenze di ripianificazione.
AMM esegue tre azioni principali:
• Pianificazione: Selezione di un piano che il sistema dovrà eseguire per
raggiungere un determinato obbiettivo. L’azione di selezione verrà eseguita da un modulo denominato Plan manager.
• Esecuzione: Il modulo denominato executor fa in modo che l’attività
• Monitoraggio: Il modulo denominato monitor osserva il comportamento del
sistema e identifica i problemi collaborando col sottosistema FDIR, ovvero la parte di sottosistema che si occupa della gestione di eventuali guasti.
2.2.4 CAM
La CAM è un’operazione che viene comandata da AMM durante la fase terminale del rendez vous nel caso di segnalato rischio di collisione. Le circostanze che devono verificarsi perchè venga comandato la CAM sono le seguenti:
• L’errore fra lo stato di riferimento (posizione e velocità del chaser relative al target) e lo stato stimato eccede un prestabilito limite.
• Durante una determinata fase, la distanza tra i due satelliti risulta essere inferiore alla minima distanza prevista per tale fase.
• Da terra viene comandata la CAM.
Essa ha ovviamente l’obbiettivo di evitare la collisione fra chaser e target tramite l’utilizzo di determinate manovre che varieranno in tipologia a seconda della strategia scelta. Può essere utilizzato uno station keeping, una manovra di fly around (volo circolare del chaser intorno ad un predefinito punto) o la semplice applicazione di un impulso di velocità per allontanare il chaser dal target. La scelta verrà effettuata in base a valutazioni sulla posizione e sulla velocità relativa del chaser rispetto al target. Successivamente sarà necessario utilizzare un’ulteriore manovra (e quindi inserire delle attività nella sequenza nominale) per riportare il chaser in un punto da cui sia possibile riprendere la missione nominale.
2.2.5 FDIR
FDIR ha il compito di individuare e risolvere o isolare i guasti, così da mantenere il veicolo operativo. Le tipologie di guasti sono suddividibili secondo tra categorie distinte:
Livello basso: Singolo errore gestito a livello di unità o di apparecchiatura da
Hardware/Software. Questi guasti possono essere riparati automaticamente senza alcun tipo di impatto a livello di sistema.
Livello medio: Tali guasti non possono essere autonomamente gestiti dall’unità stessa,
è infatti necessario l’intervento dei software FDIR che gestiscono il malfunzionamento tramite semplici controlli su parametri acquisiti su attuatori o sensori. In seguito è sempre il software FDIR ad intervenire nel modo più appropriato per il recupero della piena funzionalità.
Livello alto: In questo caso i guasti sono completamente gestiti dal software FDIR e
riguardano funzioni vitali del veicolo, lo scopo è individuare il tipo di guasto avvenuto, se tale individuazione non avviene il sistema può trovarsi in una condizione molto critica.
La capacità gestionale dei guasti prevista per il veicolo deve essere tale da permettere all’ FDIR di adempiere alle seguenti mansioni:
• Failure Identification Identifica i guasti del sistema in accordo con predefinite
strategie. Queste saranno tanto più efficaci quanto più stabili (intermittenti, transienti, etc.) risulteranno essere le manifestazioni dei sintomi prestabiliti
• Failure Isolation Impedisce la propagazione del guasto attraverso tutto il
• Failure Recovery Provvede a ristabilire le prestazioni del sistema in uno stato
valido, supportando la continuazione della missione in accordo con le strategie di set-up.
FDIR dovrà lavorare in modo strettamente connesso ad AMM, così da poter individuare con maggior facilità eventuali guasti e poter intervenire identificando eventuali sottosistemi responsabili, riconfigurando ove necessario il piano di missione.
2.3 Mars Sample Return
La missione esaminata ha l’obiettivo di mandare un veicolo spaziale in orbita marziana per recuperare e riportare sulla Terra un campione di terra. Su Marte è infatti presente un rover per il prelevamento del campione ed un veicolo appositamente progettato per portare il campione di terra in orbita intorno a Marte. La missione si basa su un rendez- vous da operare tra il chaser e il veicolo contenente il campione.
La missione ESA-MSR deriva dal precedente studio operato da CNES in collaborazione con la NASA e consistente nella cattura di un obbiettivo sferico non cooperativo contenente il campione da riportare sulla Terra(vedi figura 2.1) . In MSR verranno studiate due differenti tipologie di recupero del campione. In una si dovrà infatti procedere col recupero del campione lasciato in orbita e racchiuso in apposito contenitore. Il chaser in questo caso dovrebbe solo catturare il contenitore. Il secondo caso è invece quello secondo cui il campione è trasportato da un veicolo spaziale orbitante, rendendo necessaria l’operazione di docking, con passaggio del campione soltanto dopo l’aggancio tra i due veicoli.
Per ESA-MSR la strategia di rendez-vous scelta prevede tre fasi:
• Fase di ricerca: Il chaser viene indirizzato verso il target tramite opportune
manovre. Posizione/velocità relative sono calcolate a partire da posizione/velocità assolute (cioè rispetto ad un riferimento inerziale centrato nel pianeta di partenza) tramite navigazione a terra o tramite GPS. Questa fase dura finché l’inseguitore non sarà sufficientemente vicino da permettere il funzionamento dei sensori di navigazione relativa. I sensori di navigazione relativa consentono di stabilire posizione e velocità relativa ad un riferimento centrato nell’obiettivo.
• Fase intermedia: Questa fase inizia nel momento in cui avviene l’attivazione
dei sensori di navigazione relativa. Lo studio del moto del chaser può essere ridotto allo studio del suo moto relativo rispetto al target. In questa fase verrà operata una manovra per portare l’inseguitore sull’orbita dell’obiettivo.
• Fase terminale: Questa fase ha inizio nel momento in cui il chaser si trova sulla
stessa orbita dell’obiettivo a tre chilometri di distanza. Lo scopo è quello di concludere l’operazione col raggiungimento del target con velocità finale nulla.
Sono stati inoltre previsti e studiati tre casi di emergenza denominati contingency e definiti di seguito:
• Orbita di rendez vous non nominale. Nel caso in cui non sia possibile circolarizzare l’orbita del target, sarà necessario operare un rendez-vous su orbita ellittica.
• Impossibilità nel rilevare i dati relativi alla posizione del chaser .
Capitolo 3
Modelli fisici di riferimento
3.1 Introduzione
In questo capitolo vengono definite le equazioni e i sistemi di riferimento utilizzati per la realizzazione del simulatore:
• Le equazioni di Hill [2] e Clohessy-Wiltshire: Sono rispettivamente le
equazioni del moto scritte in forma differenziale e la loro risoluzione in forma chiusa per orbita circolare. Entrambe sono scritte in coordinate relative ad un sistema di riferimento LVLH centrato nell’obiettivo.
• Le equazioni di Koji-Yamanaka [3]: Equazioni del moto in forma chiusa,
sempre in coordinate relative ad un riferimento LVLH centrato nell’obiettivo, e generalizzate al caso di orbita ellittica. Esse costituiscono un’innovazione e sono definite in forma matriciale. Inoltre non presentano singolarità per e= 0 e sono quindi valide per ogni orbita ellittica arbitraria (0≤ e < 1).
• L’equazione di Tsiolkowsky [2]: Questa equazione viene utilizzata per
calcolare la massa di carburante necessaria per la generazione di una determinata variazione di velocità.
• Sistemi di riferimento: Il sistema di riferimento usato è quello LVLH (Local
Vertical Local Horizontal).
Le equazioni del moto scritte in forma differenziale vengono integrate dal programma e consentono di definire posizione e velocità del veicolo in ogni istante di simulazione. Le
soluzioni in forma chiusa sono invece utilizzate per ricavare le forzanti necessarie all’ottenimento delle traiettorie desiderate. Le Koji-Yamanaka vengono utilizzate per il calcolo di accelerazioni/impulsi relativi alle manovre in orbita ellittica, mentre le Clohessy-Wiltshire vengono usate nel caso di orbita circolare. In realtà le Koji-Yamanaka possono essere adoperate anche per il particolare caso di orbita circolare, è stato tuttavia deciso di limitarne l’uso al caso ellittico in modo da minimizzare i tempi computazionali.
3.2 Sistemi di riferimento e di coordinate utilizzati
Il sistema di riferimento utilizzato è quello LVLH centrato nel target e rappresentato nella figura di seguito riportata.
Figura 3.1: Sistema di riferimento LVLH
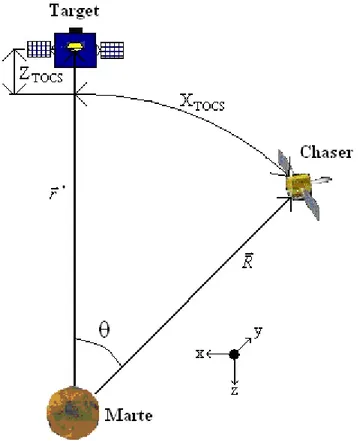
Posizioni e velocità relative del chaser in ingresso ed uscita del programma sono invece espresse in coordinate TOCS (Target Orbital Coordinate System), ovvero un sistema di coordinate avente origine nel target, ascissa curvilinea corrispondente alla traiettoria e positiva nel verso del moto, coordinata z giacente sul piano orbitale e positiva verso il centro di gravità (vedi figura 3.2).
Figura 3.2: Sistema di coordinate TOCS
In figura 3.2 il chaser occupa la posizione definita dalle componenti XTOCS <0 e ZTOCS>0
3.3 Le equazioni di Hill e di Clohessy-Wiltshire
Di seguito viene definito il significato fisico di alcune grandezze utilizzate nelle equazioni:
•
r
* è il vettore posizione del target rispetto al centro di gravità considerato.•
R
è il vettore posizione del chaser rispetto al centro di gravità considerato.•
r
è il vettore posizione del chaser rispetto al target.•
µ
è il parametro gravitazionale del centro di gravità considerato.•
a
tdè l’ accelerazione dovuta a forze esterne agenti sull’obbiettivo, ( la pressionesolare, i termini gravitazionali di ordine superiore al primo, resistenza atmosferica etc.)
•
a
cd è l’accelerazione dovuta a forze esterne agenti sul chaser.•
a
f è l’accelerazione dovuta all’apparato propulsivo del chaser.•
g
T è l’accelerazione di gravità agente sul target.•
ω
è la velocità angolare del target.Sotto definiamo invece il punto di partenza della dimostrazione di Hill:
L’equazione del moto dell’obbiettivo rispetto ad un riferimento inerziale
td
a
r
r
f cd
a
a
R
R
R
=
−
µ
⋅
(
/
3)
+
+
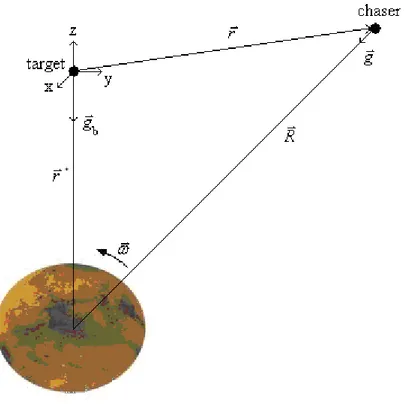
(3.2)In figura 3.3 è riportata una rappresentazione grafica dell’ubicazione di chaser e target nello spazio.
Figura 3.3: Collocazione relativa dei veicoli nello spazio
Partendo dalle (3.1)-(3.2), e supponendo valide le ipotesi secondo le quali le forze applicate ai due satelliti sono considerate identiche
td cd a
a =
e la distanza relativa fra i due satelliti è molto minore della distanza dei satelliti da terra
*
r
r
< <
arriviamo alle (3.3), laddove le componenti x, y, z si riferiscono alla posizione relativa del chaser rispetto al target, ax, ay, az costituiscono il vettore accelerazione dovuto
all’apparato propulsivo del chaser (af) :
+
+
⋅
−
⋅
−
=
+
−
=
+
+
⋅
+
⋅
+
−
=
z T y T x Ta
z
x
x
g
r
z
z
a
r
y
g
y
a
x
z
z
r
x
g
x
2 22
2
2
ω
ω
ω
ω
ω
ω
(3.3)Le (3.3) sono note come equazioni di Hill. Per andare a considerare il caso circolare, dovremo imporre la condizione di moto libero del satellite (a=0) oltre al fatto che la velocità angolare dell’obiettivo non è dipendente dal tempo e che la forza gravitazionale agente su di esso è perfettamente equilibrata dall’accelerazione centrifuga, anch’essa costante al variare del tempo. Andiamo quindi ad ottenere le equazioni di Hill adattate al caso circolare:
=
−
⋅
+
=
+
=
⋅
−
0
3
2
0
0
2
2 2z
x
z
y
y
z
x
ω
ω
ω
ω
(3.4)Per le (3.4) è stato possibile calcolare le soluzioni sotto riportate e note in letteratura come equazioni di Clohessy-Wiltshire:
( )
( ) (
)
(
) ( )
( )
( )
( )
( )
( )
( )
( )
−
+
⋅
+
⋅
−
=
⋅
⋅
−
⋅
=
⋅
+
⋅
=
−
⋅
+
⋅
+
⋅
⋅
−
=
+
+
⋅
−
⋅
⋅
+
⋅
−
⋅
−
=
x
z
t
z
t
z
x
z
t
y
t
y
y
t
y
t
y
y
x
z
t
z
t
z
x
x
z
x
t
x
z
t
z
t
z
x
x
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
ω
2
4
sin
cos
3
2
sin
cos
cos
sin
3
6
sin
2
cos
6
4
2
3
6
cos
2
sin
6
4
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
(3.5)3.4 Le equazioni di Koji-Yamanaka
In questo caso, ci proponiamo di andare a calcolare la soluzione omogenea delle (3.3). Considerando che h è il momento della quantità di moto del target e che avrò
h
r
*2ω
=
(3.6)Possiamo definire la costante k come
2 3 2 3 2 3 3
/
/
µ
ω
ω
µ
r
h
≡
k
=
,k
≡
h
2=
const
3/
µ
(3.7)Tali assunzioni permettono di andare a riscrivere le (3.3) in un modo più comodo alla trattazione svolta da Koji e Yamanaka.
td cd f
a
a
a
z
x
x
z
k
y
k
x
z
z
x
k
z
y
x
−
+
+
+
⋅
−
⋅
−
−
+
⋅
+
⋅
+
−
=
2 2 3 2 3 2 2 32
2
2
ω
ω
ω
ω
ω
ω
ω
ω
ω
(3.8)L’importante semplificazione che viene apportata a tali equazioni e che permette di aggirare singolarità altrimenti inevitabili, si basa sull’assunzione dell’anomalia vera ϑ come variabile indipendente e sulla seguente trasformazione:
ϑ
ρ
≡
1
+
e
⋅
cos
(3.9)
⋅
=
z
y
x
z
y
x
ρ
~
~
~
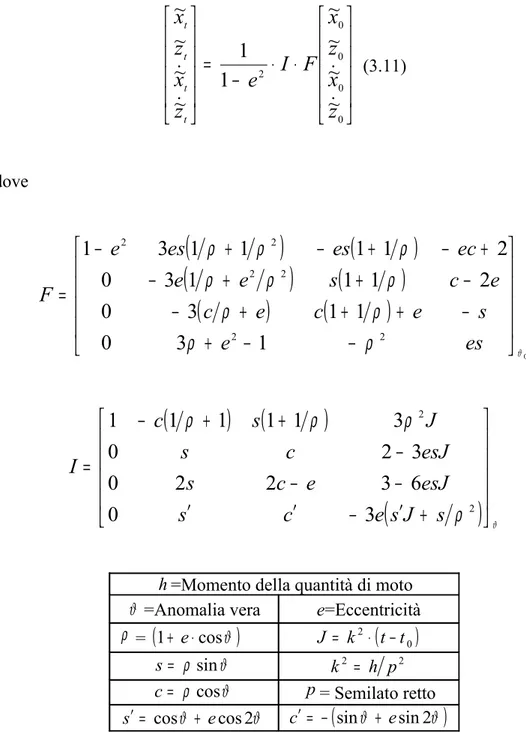
(3.10)Il procedimento risolutivo è stato affrontato appoggiandosi alle teorie di Carter [4]e consultabili nei testi riportati in bibliografia. Allo scopo di mantenere il testo ad un livello di sintesi apprezzabile si è però deciso di passare direttamente alla descrizione delle equazioni conclusive (per la dimostrazione completa si rimanda al testo di riferimento). Il risultato relativo al piano orbitale e quindi riguardante le equazioni dipendenti in x e z è ancora una volta definito rispetto ad un riferimento LVLH.
⋅
⋅
−
=
0 0 0 0 2~
~
~
~
1
1
~
~
~
~
z
x
z
x
F
I
e
z
x
z
x
t t t t
(3.11) Laddove(
)
(
)
(
)
(
)
(
)
(
)
0 2 2 2 2 2 21
3
0
1
1
3
0
2
1
1
1
3
0
2
1
1
1
1
3
1
ϑρ
ρ
ρ
ρ
ρ
ρ
ρ
ρ
ρ
ρ
−
−
+
−
+
+
+
−
−
+
+
−
+
−
+
−
+
−
=
es
e
s
e
c
e
c
e
c
s
e
e
ec
es
es
e
F
(
) (
)
(
ρ
)
ϑρ
ρ
ρ
+
′
−
′
′
−
−
−
+
+
−
=
2 23
0
6
3
2
2
0
3
2
0
3
1
1
1
1
1
s
J
s
e
c
s
esJ
e
c
s
esJ
c
s
J
s
c
I
h=Momento della quantità di moto
ϑ =Anomalia vera e=Eccentricità ρ =
(
1+ e⋅cosϑ)
J = k2⋅(
t−t0)
ϑ ρ sin = s k2 = h p2 ϑ ρ cos = c p= Semilato retto ϑ ϑ cos2 cos e s′ = + c′ = −(
sinϑ + esin2ϑ)
Di seguito illustriamo le relazioni che vi sono tra i vettori posizione e velocità e i vettori input ed output delle (3.11).
=
z
x
r
,
=
z
x
v
Dalle (3.10)si ottiene quindi
r
r
=
ρ
~
(3.12a)ϑ
sin
~
e
v
=
−
r
k
v
+
ρ
21
(3.12b)ρ
r
r
~
=
(3.13a)v
=
k
2(
e
sin
ϑ
r
~
+
ρ
v
~
)
(3.13b)Attraverso le (3.12) trasformiamo lo stato iniziale dello spacecraft nell’input delle (3.11). Attraverso le (3.13) trasformiamo l’output delle (3.11) nello stato finale dello spacecraft.
Come si può facilmente notare, in questo capitolo è stato affrontato soltanto la parte delle equazioni riferita al piano orbitale, in quanto l’intero lavoro è mirato ad uno studio di prima approssimazione e quindi bidimensionale. Per la risoluzione della differenziale relativa alla componente y si rimanda al testo di riferimento [3].
3.5 L’equazione di Tsiolkowsky
Per poter valutare il carburante necessario ad ogni manovra e, conseguentemente, all’intera missione, è necessario ricorrere all’equazione di Tsiolkowsky. In questa equazione vengono correlati i seguenti parametri:
• l’impulso specifico Isp
• l’accelerazione gravitazionale misurata sulla Terra a quota zero g0
• la massa iniziale M0 • la massa finale Mf • la variazione di velocità ΔV • la massa di carburante Mp
=
∆
f spM
M
I
g
V
0 0ln
(3.14) p fM
M
M
=
0−
(3.15)Dalla quale si ottiene, partendo dalle (3.14) e tenendo conto della (3.15)