CHAPTER I
Problem definition and state of the art:
The neural interfaces with peripheral nervouse system and their use to develop hybrid neuroprosthetic systems
1.1. Aim of peripheral neural interfaces
Nowadays, in the world, there is increasing number of persons with spinal cord injuries or with different kinds of limb amputation. Hybrid neuroprosthetic systems, artificial devices capable of restoring or improving neural function lost after injuries, are nowadays a therapeutic option for spinal cord injured patients, or the patients with a limb prostheses. One of most perspective ideas for restoring sensorimotor functions in such patients is the development of highly-functional, bidirectional neural interfaces for the functional control of artificial devices. It has to be observed that neural interfaces can be applied also at the brain level, with the aim to resolve a variety of deficits (e.g. visual prostheses, brain-machine interfaces, brain-computer interfaces ). In this study we are exploring neural interfaces with the peripheral nervous system.
Two basic applications of neural interfaces for biomedical use are: control of artificial limb- prostheses (with complete neural feedback) or functional electrical stimulation (FES) systems, developed in order to artificially replace the central motor control and directly stimulate the intact peripheral nerves or muscles of spinal cord injured patients, attempting to generate movements that mimic normal voluntary actions.
In the absence of a natural hand, a prosthetic one (Fig.1.1.) is one of most inviting functional solutions for amputee patients.
Fig.1.1.CyberHand (Scuola Superiore Sant Anna)
The hand prostheses presently commercially available are mostly EMG based (Fig. 1.2) (Suva hand, Sensor hand), but they present some important limiting factors:
• Very limited number of Degrees of Freedom (DOF) obtainable -generally two- corresponding to antagonist muscles contraction (e.g. hand aperture-biceps contraction, hand closing-triceps contraction)
• Plenty of training necessity- user has to make many repetitions to improve its use, e.g. in order to open the hand has to contract biceps, an non-natural control.
• Absence of sensory feedback. Unique mode for user to understand the state (position, temperature, touch information) of his robotic hand is by looking at it, and without idea about thermal or nocioceptive stimulus from surrounding.
Fig.1.2. Two DOF EMG controlled prosthesis
As a response on efforts to overcome the problems explained above the state of art investigation in this field is mainly focusing on the use of neural electrodes of different types for interfacing the nervous system with the prosthesis [2]. They should provide:
• More control sources- permitting more DOF to be achieved.
• More natural control - ElectroNeurographic (ENG) signals are used- they are direct consequence of brain control at the peripheral level, permitting thus natural control.
• Neural feedback achievable- they can be used for stimulation of peripheral nerves, in order to transmit afferent, sensory information to the central nervous system (CNS)
Eventual obtained benefits in some or all of these requirements has the trade off with high invasiveness in comparison with the case of superficial electrodes, used in EMG based prostheses.
Interface between the PNS and neuroprostheses Interface between the PNS and neuroprostheses
Efferent Efferentnervenerve
Electrode Electrode
Mechanical
Mechanicalprosthesisprosthesis Action Action CNS
CNS
Afferent Afferentnervenerve
Electrode Electrode
Sensor Sensor
Fig.1.3 Use of Neural interfaces in hand prostheses
In Figure 1.3 a schematic of a bidirectional neural feedback system is represented: one electrode is taking the efferent neural information, transferring it to the processing unit (e.g. DSP) which performs movement detection and classification, and finally transmits the control signal to the robotic hand.
In the other (afferent) direction, artificial sensors are taking the sensory information from the prosthesis (e.g. position, slip information, temperature) and transfers it to the processing unit which, after appropriate classification, gives the signal for the electrical stimulation of sensory nerves with an electrode in order to give afferent information to the CNS.
With a highly efficient data elaboration algorithm it should be possible to use only one electrode for both interface directions.
In order to understand the nature of signals we elaborate the short overview of Peripheral Nervous System is given.
1.2. An overview of the Peripheral Nervous System
The PNS is constituted by neurons whose cell bodies are located in the spinal cord or within spinal ganglia, their central connections and their axons, which extend through peripheral nerves to reach target organs. Peripheral nerves contain several types of nerve fibers. Afferent sensory fibers can be unmyelinated or myelinated, the latter ranging from 2 to 20 µm in diameter, and terminate at the periphery either as free endings or in a variety of specialized sensory receptors in the skin, the muscle and deep tissues. Sensory fibers convey a variety of sensory information, mainly mechanical, thermal and noxious types of stimuli. Efferent motor fibers originate from motoneurons in the spinal cord and end in neuromuscular junctions in skeletal muscles. Motor fibers can be divided into alpha-motor fibers that innervate the skeletal extrafusal muscle fibers, and gamma-motor fibers that innervate the spindle muscle fibers. Efferent autonomic nerve fibers in somatic peripheral nerves are postganglionic sympathetic fibers, generally unmyelinated, that innervate smooth muscle and glandular targets. The number and type of nerve fibers is highly variable depending on the nerve and the anatomical location. The majority of the somatic peripheral nerves are mixed, providing motor, sensory and autonomic innervation to the corresponding projection territory.
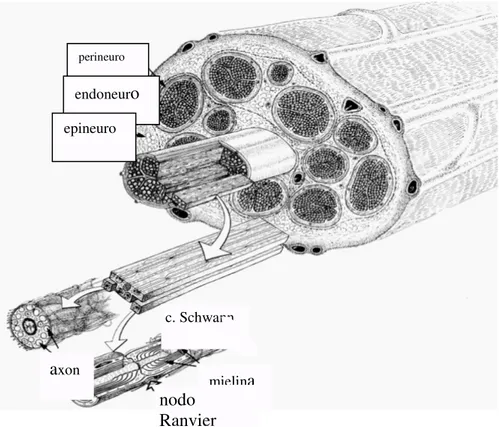
Nerve fibers are grouped in fascicles surrounded by connective tissue in the peripheral nerve. There are three connective sheaths: epineurium, perineurium and endoneurium (Fig. 1.4). The epineurium is the outermost layer, composed of loose connective tissue and carries blood vessels that supply the nerve. The perineurium surrounds each fascicle in the nerve. It consists of inner layers of flat perineurial cells and an outer layer of collagen fibers organized in longitudinal, circumferential and oblique bundles. The endoneurium is composed of fibroblasts, collagen and reticular fibers and extracellular matrix, occupying the space between nerve fibers within the fascicle. The endoneurial collagen fibrils are packed around each nerve fiber to form the walls of the endoneurial tubules. Inside these tubules axons are accompanied by Schwann cells, which either myelinate or just surround the axons. It is worth to note that, because of the insulating properties of perineurial and
epineurial layers, intraneural electrodes allow for higher recording selectivity and better signal-tonoise ratio than extraneural electrodes.
Fig. 1.4. Structure of the peripheral nerve. From Lundborg 1988.
The natural actions of the body are controlled by neural signals going from the CNS to the PNS conducted by the efferent nerve fibers to recruit different muscles. Each spinal motoneuron makes synaptic contacts with a number of skeletal muscle fibers, constituting a motor unit. The nervous system produces graded contraction of each muscle by increasing the number of motor units activated, and by increasing the frequency of action potentials to each motor unit, with a size-order recruitment of motor units. On the other hand, the information transduced by the natural sensors are conducted to the CNS by excitation of the afferent nerve fibers. Each sensory neuron is dedicated to one specific sensory modality depending upon the specialized terminal receptor in the skin or muscle. The receptor membrane thus transduces either tactile, propioceptive, thermal or nocious stimuli. Signals are transmitted by the corresponding axons in series of action potentials, with
perineuro endoneuro epineuro axon c. Schwann mielina nodo Ranvier
intensity of the signal mainly coded in impulse frequency along the peripheral axon. Each sensory neurons subsides a receptive field area in the peripheral tissue, with variable sizes according to the body segment.
Different types of nerve fibers have different sizes, with corresponding variations in conduction velocity, internodal distance and excitability of the axonal membrane (Table 1). With respect to electrical stimulation of the peripheral nerve, large myelinated fibers are activated before small myelinated and unmyelinated fibers. This characteristic is advantageous for stimulation of afferent fibers to provide sensory feedback, since tactile or position sensations can be elicited without evoking pain sensation. With respect to neural signal recording, the amplitude of extracellular recorded action potentials decreases also with decreasing size of the axons. Therefore, detection above background noise is easier for impulses propagated in large motor and mechanoreceptive sensory fibers than in small sensory and sympathetic fibers. Ideal electrodes wouuld be able to record unitary activity and selectively differentiate units by fiber size established on conduction velocity measurements.
Table 1. Classification of nerve fibers.
Fibre type Function Diameter
(µm)
Conduction velocity (m/s)
Myelinated
Aα α α α Alpha-motor efferents Proprioceptive afferents
12 – 22 60 – 120
Aβ β β β Tactile, proprioceptive afferents 6 – 12 40 – 70
Aγ γ γ γ Gamma-motor efferents 3 – 5 30 – 45
Aδ δ δ δ Pain, cold afferents 2 – 5 10 – 30
B Preganglionic autonomic efferents 1 – 5 3 – 15
Unmyelinated
sC Postganglionic autonomic efferents 0.3 – 1.3 0.7 – 2.3 dC Thermal, heat pain, mechanical
afferents
1.3. STATE OF THE ART
A basic physical element of this system are neural electrodes of different types. At present, critical components of the above explained system are:
• Development of highly accurate, little invasive neural electrodes
• Development of robust and precise data-elaboration algorithms in order to distinguish between highest possible number of different afferent and efferent signals.
1.3.1. Implantable microelectrodes
In order to be used successfully in this context microelectrodes have to respect a few essential requirements:
• Biological compatibility, acute and chronically • Capacity to stimulate and record neural signals
A multiplicity of different microelectrodes has been used in research, which can be basically classified in base on their invasiveness and selectivity ( Fig.1.4.)
The state of the art for different electrodes is discussed below.
1.3.1.1. Cuff electrodes
Cuff electrodes (Fig.1.6.) are composed of an insulating tubular sheath that completely encircles the nerve and contains electrode contacts (poles) exposed at their inner surface that are connected to insulated lead wires.
Fig.1.6.Cuff electrode
This kind of electrode can be placed around the peripheral nerve like an open tube. Thereby the electrodes can be positioned inside the cuff to get in close contact to the nerve surface. This configuration has the disadvantage that the epineurium that covers the nerve is between the electrode and the nerve fibres. The epineurium works as a kind of insulator and thereby reduces the recording signals and increases stimulation thresholds. Multi polar cuff electrodes can be used for selective stimulation and recording, where the different fascicles of a nerve could be stimulated. Cuffs have several advantages: they allow for correct positioning of electrodes
leads to minimize mechanical distortion and lead failure, and (if used for stimulation) stimulating current is confined to the inner space of the electrode, thus avoiding the stimulation of other neighboring nerves and tissues.
In comparison with other, more invasive types of nerve interfaces, such as penetrating and regenerative electrodes, cuff are easier to implant and less invasive, so they are likely to induce less nerve damage. This advantage has the trade-off of a reduced selectivity with respect to more invasive types of electrodes.
A schematic of the production of a multipolar cuff electrodes is shown in Fig. 1.7.
Fig.1.7. Production of cuff electrodes (with permission of IBMT)
Cuffs used in our laboratory work were made using a polyimide resin as substrate and insulation material. It consists of a flat rectangular piece (12 x 6.75 mm), an interconnect ribbon at a 90 degrees angle (2mm wide, 26 mm long) and an ending enlargement (2x10 mm) with contact pads. The whole structure has a thickness of 10 micrometers and a weight of 5 mg, and is highly flexible. The cuff part is rolled to become the cylinder with an inner diameter between 1.0 and 1.8 mm and a length of 12 mm. Three recording-stimulating platinum electrodes are arranged with a 5mm interelectrode distance. More detailed production explanation can be consulted in [3].
The requirement of biocompatibility has been studied [4], with the result that implantation does not produce nerve damage , neither electrode fail in chronic studies. In the same place [4], the
stimulation ability of cuffs has been proved, with measurement of correspondent muscular responses.
More selective fascicular simulation of the rat sciatic nerve has been demonstrated by using multipolar (twelve-polar) polymide cuff electrodes.[5]
Actually, two different variants of cuff electrodes have been tested in our in-vivo experiments: Three polar, and Twelve polar.
1.3.1.2. Longitudinal Intra-Fascicular Electrode (Life)
Intrafascicular electrodes may achieve a higher degree of selectivity, by placing electrical contacts within the nerve, inside a nerve fascicle, by blunt penetrating the epineurium and the perineurium. A kind of intrafascicular electrode combines a loop of a thin film electrode with a filament loop including a thin needle (Fig1.8.).
Fig.1.8. Life electrode with implantation equipment
This needle can be used as guidance to implant the thin film electrode longitudinal into the nerve. Only the thin film electrode will then remain placed into the nerve . Depending on the implantation of the electrode a high selectivity can be achieved [2]. By detecting signals from only a small number of axons, they allow more selective recordings than cuff electrodes.
In Fig.1.9. is presented a LIFE polymer-based intrafascicular electrode (polyLIFE). The polyLIFE consists of a Kevlar fiber, metallized with titanium (Ti), gold (Au), and platinum (Pt) and insulated with silicone. The recording/stimulation zone consists of approximately 1 mm non-insulated portion of the metallized fiber.
Fig.1.9.Cross selection of Poly-life electrode
Recently, exploiting the potentials of microtechnologies a new design of thin-film (tf) LIFEs based on polyimide substrate has been developed (Fig.1.10.). Some of the advantages of polyimide-based electrodes are that they are highly flexible, can be micromachined to secure high precision, and that a high number of active sites can be positioned within a small surface. A large number of active sites enhances signal to noise ratio, and in theory increased selectivity can allow to deliver more effective sensory feedback.
.
Fig.1.10.Closer look of a tfLIFE structure. L1-L4 and R1-R4 are electrode contacts on the left and right part of device respectively. L0 and R0 are the indifferent recording reference electrodes. Two large ground electrodes are placed at the end of the electrode area needed for tripolar recording.
Methods for production of tfLIFEs are electrochemical and are explained elsewhere [6].
The biocompatibility of such tfLIFE implants has recently been studied [7],[8]. In [8] during three months, histological and functional studies have been performed resulting in minimal nerve damage without axonal loss and degeneration. Longitudinally implanted LIFEs behaved slightly better than transversally inserted ones.
Fig.1.11. Complete tf-LIFE system with a silicone-encapsulated ceramic connector and filament and tungsten needle for insertion.
Physiological studies [8] indicated that Life-s are appropriate for the selective stimulation use. Their increased selectivity (even single spikes can be recorded) is paid in terms of increased invasiveness with respect to cuffs.
In [9] it has been shown, for the first time in human experiments, the possibility of gradual neural sensory feedback. By means of intrafascicular stimulation it was possible to produce graded, distally referred sensations of touch and joint movement, whereas the recordings of motor nerve activity associated with attempted movement of the phantom limb through these electrodes could be used as graded control signal.
One very important topic for neural electrodes are plastic changes in the CNS of humans triggered by events such as limb amputation. Residual function takes different pathways from before the amputation [10]. Studies demonstrated that central pathways, associated with amputated peripheral nerves retain at least some sensory and motor function. Afterwards effects of training on eventually improving this pathways have been studied. To do this, the electrodes have been implanted within fascicles of severed nerves of long-term human amputees to evaluate the changes in electrically
evoked sensations and volitional motor neuron activity associated with attempted phantom limb movements. Nerve stimulation consistently resulted in discrete, unitary, sensations of touch/pressure and joint-position sense. Hence CNS pathways retain some functionality even 30 years after amputation. Moreover the idea proposed is that with electrodes implanted in different fascicles is possible to give the sensation of different digits in amputee. These recent results [9],[10] give optimism for the use of LIFE electrodes in bidirectional neuroprostheses.
A limiting fact, beside the increased invasiveness of LIFE implants, is that quality of recorded ENG signal depends of position of the electrode inside the nerve- which can be difficultly controlled. One promising idea to overcame this problem is given in [11]. Here is presented an idea for developing a movable interface by embedding microactuators into the flexible tf-LIFE structure. In this way the optimal position of the electrical contacts can be searched inside the PNS and lost connection contacts with neural cells could be replaced.
1.3.2. Data elaboration algorithms
Appropriate data classification is of essential importance for the performance of a complete interface system. A general scheme of data-elaboration is presented in Fig. 1.12.
Fig.1.12. Data elaboration schema
Initially the raw data are analogically band-pass filtered, before seeding them in to the computer for data elaboration.
The Signal conditioning step is used to eliminate sources of noise that have different frequency content. Since the Signal of Interest (SOI) is ENG, all others such as: low-frequency artefacts, power 50 Hz noise, EMG signal, high frequency amplifier noise have to be eliminated in order to obtain better SNR. To do this some band pass filtering has to be done.
After, the filtrated data has to be somehow “changed” in order to empathise events of interest with respect to a rest state. Different features have to be extracted in the search for those which will be more representative for the SOI.
Because of the impossibility to extract plenty of features in real-time application, only those “more informative” have to be saved. Concept of “information” context can be tested in classic ways (e.g. Principal Components Analysis, Features Forward Selection, Independent Components Analysis ) or by different feature combination comparing the classification results. In the pattern recognition step the data elaboration system has to be able to classify new samples (test) from experience (training).
In the final evaluation of the algorithm it has to be considered its robustness (independence of parameters, not production of false positives), precision (percent of correct classification) and rapidity (in prospective of real time implementation)
The choice of types of stimulus to distinguish is important, in order to be able to classify afferent activity useful for a given application. Those stimuli for a hand prosthesis use are:
• Slip • Touch
• Proprioceptive • Nocioceptive (pain) • Efferent (motor)
Hence in an experimental setup such types of stimuli have to be produced. It is important to understand that in the physiological state of the PNS some of these stimuli are conducted by nerve
fibers belonging to the same type; therefore, it may be difficult to distinguish them from their intrinsic mode of conduction.
The afferent activity classification has been object of different studies [12], [13], proposing a big variety of different approaches. Three different afferent states and rest state have been distinguished with up to 86.9 % of correct classification in [13].