Parte III
Appendici
Appendice
A
Manuale di utilizzo
A.1
Autopilota della quota
L’autopilota della quota `e ideato in modo tale da poter raggiungere la quota desiderata; inserito il valore scelto, il sistema corregge la velocit`a verticale sino a che la quota non entra in una prefissata soglia (nella versione attuale, ad esempio, pari a 50 ft) rispetto al suo valore finale.
Il riferimento per la climb speed viene preso o dal display del relativo autopilo-ta, se anche questo fosse acceso, oppure da una costante interna preimpostata (ad esempio, 3 m/s); in quest’ultimo caso, il segno della costante `e scelto in base al segno dell’errore sulla quota.
Una volta che il velivolo `e entrato nella soglia, in effetti, il sistema passa a controllare direttamente la quota, livellandola al proprio riferimento.
Questo autopilota comunque non pu`o essere acceso congiuntamente a quello della IAS, in quanto si avrebbe il conflitto di due variabili controllate dallo stesso comando, ovvero l’equilibratore.
Il sistema congela il valore iniziale di questo comando, rispetto al quale som-ma le variazioni richieste dall’autopilota; il cosom-mando di som-manetta `e invece lasciato libero di essere gestito dal pilota.
A.2
Autopilota di navigazione WP
A – Manuale di utilizzo
evitare la cosidetta “curva del cane”, descritta in [14] come inaccettabile per condotta di volo strumentale, e che porterebbe ad un incremento della sen-sibilit`a del sistema via via che ci si avvicina a B con conseguente aumento delle variazioni di traiettoria finali. In tale caso testi quali [16] suggeriscono di disingaggiare il sistema quando si raggiunge una certo intorno di B. Il sistema implementato consente invece di raggiungere esattamente il punto finale ed attraversare la verticale di B: tuttavia, il sistema va comunque di-singaggiato non appena raggiunto l’ultimo waypoint desiderato.
Infatti, poich`e la correzione angolare utilizzata `e proporzionale alla differenza tra il rilevamento polare istantaneo e quello iniziale congelato AB ed il coef-ficiente di correzione viene scelto pari a 8◦-15◦ per grado di differenza, come suggerito in [16], se tale differenza `e troppo grande si potrebbe arrivare ad una saturazione dei comandi interessati con conseguente probabile insuccesso del controllo.
Questo accade anche quando si oltrepassa il waypoint e non si stacca il controllo: la differenza in questione diverrebbe di ±180◦.
Per lo stesso motivo, sarebbe conveniente non richiedere al sistema di do-ver comandare una virata per portarsi su un punto con rilevamento polare troppo differente dalla rotta iniziale ed iniziare la manovra comandando ma-nualmente il velivolo.
Il sistema fornisce ottimi risultati se accoppiato a quello della velocit`a ver-ticale, ad esempio, per mantenere la quota iniziale durante l’effettuazione della manovra; oppure, `e il pilota a dover intervenire sui comandi del piano longitudinale per contrastare la diminuzione della componente verticale di portanza.
Il solo comando che passa alla gestione automatica `e l’alettone; il timone, che interviene solo nella retroazione dello yaw damper pu`o essere ancora gestito dal pilota.
A.3
Autopilota di navigazione VOR
A – Manuale di utilizzo
di 180◦ il sistema la mette negativa togliendole un angolo giro, altrimenti la lascia come `e.
Questo cambiamento serve successivamente per vedere, dal confronto con il segno del rilevamento polare CB (Fig. 4.136), da quale parte si deve virare, una volta raggiunto C, per portarsi su B.
In altre parole, in C si determina il corretto valore della radiale che costituisce il riferimento per l’angolo η.
Anche tale sistema utilizza la correzione descritta nel paragrafo precedente per accostare il velivolo prima sulla normale alla radiale prescelta e poi sulla radiale stessa: dunque anche in tal caso sarebbe conveniente posizionare il velivolo in maniera opporuna prima di ingaggiare il sistema, ovvero con differenza tra la rotta iniziale ed il rilevamento polare della normale alla radiale non eccessiva. I test effettuati, comunque, assicurano il successo della manovra anche per angoli maggiori di 90◦.
Sempre in testi di sistemi di controllo quali [15] si sviluppa tale sistema, denominato VOR - coupled, per differenze iniziali modeste, non superiori a 15◦-20◦, oltre le quali sarebbe necessario un circuito che limitasse la velocit`a angolare di rollio ed anche l’angolo di rollio comandato di conseguenza, al fine di non arrivare alla saturazione del comando e quindi al possibile insuccesso del controllo.
Anche questo sistema, se accoppiato a quello della velocit`a verticale per mantenere la quota iniziale durante la navigazione, restituisce ottimi risultati. La gestione dei comandi `e identica al caso precedente.
A.4
Autopilota della IAS
Il sistema porta rapidamente verso il valore inserito tramite l’utilizzo del co-mando di equilibratore.
Dall’osservazione delle curve della trazione necessaria e disponibile (Fig. 4.4) si pu`o notare come anche piccole variazioni di IAS richieste rispetto a quella di trim possano portare a pi`u sensibili variazioni della pendenza della traiet-toria e di conseguenza dell’assetto.
A – Manuale di utilizzo
il rapido sviluppo di una variazione di γ e θ.
Il comando di equilibratore, proveniente dal joystick, `e l’unico ad essere bloc-cato e passare alla gestione automatica: il comando di manetta viene invece lasciato alla gestione del pilota, ad esempio per potersi riportare nella condi-zione iniziale di pendenza della traiettoria nulla.
Come gi`a detto, questo autopilota non deve essere acceso ne con quello del-la velocit`a verticale ne con quello della quota, per non causare conflitti sul comando.
A.5
Autopilota del circling
L’inserimento di un valore del raggio positivo implica la nascita di una ve-locit`a angolare di rollio e di un angolo di bank positivi, dunque antiorari rispetto ad una vista frontale del velivolo.
Perci`o la traiettoria che ne risulta `e nel senso orario.
Se si parte da una condizione di ali livellate con φ nullo, il raggio di curvatura `
e inizialmente infinito secondo la (4.9).
Raggiunto il valore di regime il velivolo si mette a ruotare attorno ad un asse verticale passante per il centro di rotazione: se si vuole rappresentare la traiettoria descritta nel piano longitudune - latitudine, determinate secondo le equazioni di navigazione descritte in [3], solo nel caso in cui l’asse di ro-tazione coincida con l’asse normale a tale piano si ottiene una circonferenza esatta; in ogni altro caso si otterrebbe una ellisse, proiezione della circonfe-renza descritta, rispetto all’asse di rotazione, sul piano di rappresentazione. Il successo del test rimane comunque verificato se si va a controllare l’anda-mento del raggio di curvatura.
Questo autopilota pu`o essere acceso con quello della velocit`a verticale al fine del mantenimento della quota iniziale, esattamente come per i casi di navi-gazione per waypoints e VOR; anche la gestione dei comandi `e identica a questi casi.
A – Manuale di utilizzo
piano longitudinale.
Nel primo autopilota il comando che passa in gestione automatica `e l’alettone, mentre il timone `e lasciato in gestione manuale; nel secondo, poich`e l’angolo di rotta `e regolato dal timone, accade il contrario: dunque il pilota pu`o intervenire sull’alettone se non si vuole una manovra eseguita con δa nullo.
Appendice
B
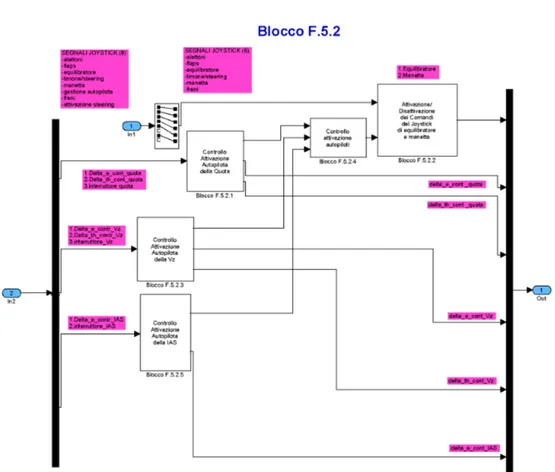
Blocchi Simulink
B – Blocchi Simulink
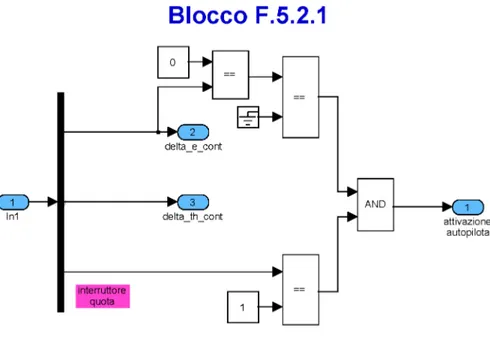
Figura B.2: Blocco F.5.2.1
B – Blocchi Simulink
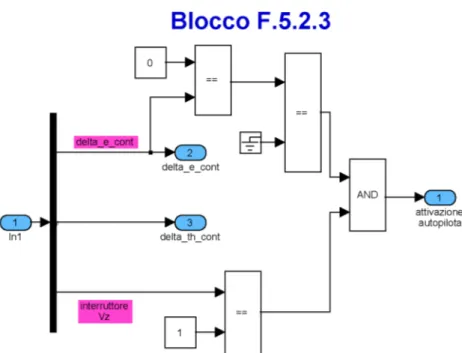
Figura B.4: Blocco F.5.2.3
B – Blocchi Simulink
B – Blocchi Simulink
B – Blocchi Simulink
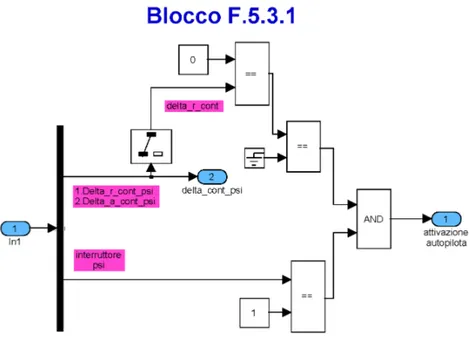
Figura B.8: Blocco F.5.3.1
B – Blocchi Simulink
B – Blocchi Simulink
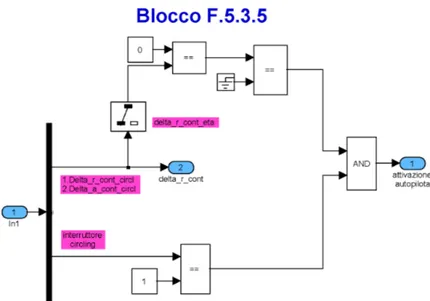
Figura B.12: Blocco F.5.3.5
B – Blocchi Simulink
Bibliografia
[1] Casarosa, C., Galatolo, R., Mengali, G., e Pisani, M., Progetto SCAUT: Studio di fattibilit`a, Atti di Dipartimento, Universit`a degli Studi di Pisa, Dipartimento di Ingegneria Aerospaziale, Via Caruso, Giugno 2001. [2] Meliti, F., Nanchi, F., e Pascuzzi, P., Studio di un velivolo non abitato
per il controllo automatico del territtorio, Tesi di Laurea, Universit`a degli Studi di Pisa, 1999-2000.
[3] Acerbi, T. e Panesi, R., Sviluppo di un banco prova per la simulazione di velivoli non abitati , Tesi di Laurea, Universit`a degli Studi di Pisa, 2001-2002.
[4] Samaria, A. e Vitali, E., Sviluppo del Flight Management System per il banco prova di volo di velivoli non abitati , Tesi di Laurea, Universit`a degli Studi di Pisa, 2002-2003.
[5] Del Corso, R., Messa a punto del banco prova per la simulazione di un velivolo non abitato, Tesi di Laurea, Universit`a degli Studi di Pisa, 2003-2004.
[6] Spadoni, A., Progetto e messa a punto di un banco prova per la verifica delle caratteristiche di sicurezza di un velivolo UAV , Tesi di Laurea, Universit`a degli Studi di Pisa, 2004-2005.
[7] Von Mises, R., Theory of flight , Dover Publication Inc., New York, 1959. [8] Tripodo, V., Caratterizzazione delle prestazioni del sistema propulsivo di un velivolo non pilotato: progettazione e messa a punto di un banco prova, Tesi di Laurea, Universit`a degli Studi di Pisa, 2003-2004.
[11] Mengali, G., Elementi di Dinamica del Volo con Matlab, Edizioni ETS, Pisa, 2003.
[12] Ogata, K., Modern Control Engineering, Prentice Hall International, Inc., 1997.
[13] Doveri, L., Sviluppo di un sistema di simulazione in tempo reale in ambiente Simulink , Tesi di Laurea, Universit`a degli Studi di Pisa, 2000-2001.
[14] Trebbi, R., Strumenti e Navigazione, I Testi del Pilota Professionista, Aviabooks, Corso Duca degli Abbruzzi, Torino, Gennaio 1995.
[15] Mc Lean, D., Automatic Flight Control Systems, Prentice Hall International, Inc., 1990.
[16] Blakelock, J., Automatic Control Of Aircraft and Missiles, John Wiley and Sons, Inc., New York, 1991.
Elenco delle figure
2.1 Schema generale del banco prova . . . 6
2.2 Composizione del rack del banco prova . . . 7
2.3 Schema del flusso di dati nel banco prova . . . 8
2.4 Schema generale della rete locale del banco prova . . . 9
2.5 Modello dell’UAV . . . 11
2.6 Banco prova completo . . . 11
3.1 Schema generale del Simulatore . . . 15
3.2 Blocco A del Simulatore del rack . . . 16
3.3 Blocco A del Simulatore Stand Alone . . . 16
3.4 Blocco B del Simulatore del rack . . . 17
3.5 Blocco B del Simulatore Stand Alone . . . 17
3.6 Curve caratteristiche dell’elica . . . 19
3.7 Curva δth - RP M . . . 20
3.8 Trazione disponibile s.l.m. per δth = 1 . . . 20
3.9 Blocco C.1 . . . 21 3.10 Blocco C.1.1 . . . 21 3.11 Blocco C.1.1.1 . . . 22 3.12 Blocco A.1 . . . 23 3.13 Blocco C.1.2 . . . 23 3.14 Blocco C.1.2.1 . . . 24 3.15 Blocco C.7 . . . 24
4.1 Schema del Pitch Damper . . . 31
4.2 Luogo delle radici di q/δe con attuatore: alta frequenza . . . . 33
4.3 Luogo delle radici di q/δe con attuatore: bassa frequenza . . . 33
4.4 Effetti dell’autothrottle . . . 35
4.5 Schema dell’autothrottle . . . 35
4.6 Luogo delle radici di u/δth con attuatore: alta frequenza . . . 37
4.7 Luogo delle radici di u/δth con attuatore: bassa frequenza . . . 37
4.8 Schema dell’autopilota della IAS . . . 38
4.9 Luogo delle radici di IAS/δe: alta frequenza . . . 40
4.10 Luogo delle radici di IAS/δe: bassa frequenza . . . 40
4.11 Diagramma di Bode generalizzato di IAS/δe . . . 41
4.12 Diagramma di Bode in ciclo chiuso IAS/IASref . . . 42
4.13 Risposte temporali a gradino unitario di IAS: corto periodo . . 43
4.14 Risposte temporali a gradino unitario di IAS: lungo periodo . 44 4.15 Blocco D del Simulatore Stand Alone con autopilota IAS . . . 46
4.16 Blocco D.AUTO.IAS.de . . . 47
4.17 Blocco B.AUTO.IAS.de . . . 48
4.18 Autopilota IAS: confronto risposte della IAS nel corto periodo 49 4.19 Autopilota IAS: confronto risposte della IAS nel lungo periodo 49 4.20 Autopilota IAS: confronto risposte di δe nel corto periodo . . . 50
4.21 Autopilota IAS: confronto risposte di δe nel lungo periodo . . 50
4.22 Velocit`a verticale Vz . . . 51
4.23 Schema dell’autopilota della Vz con δe . . . 51
4.24 Luogo delle radici di Vz/δe: alta frequenza . . . 54
4.25 Luogo delle radici di Vz/δe: bassa frequenza . . . 54
4.26 Diagramma di Bode generalizzato di Vz/δe . . . 55
4.27 Diagramma di Bode in ciclo chiuso Vz/Vzref . . . 56
4.28 Risposte temporali a gradino unitario di Vz: corto periodo . . 57
4.29 Risposte temporali a gradino unitario di Vz: lungo periodo . . 58
4.30 Blocco B del Simulatore Stand Alone con autopilota Vz . . . . 60
4.31 Blocco D del Simulatore Stand Alone con autopilota Vz . . . . 61
4.36 Autopilota Vz: confronto risposte di δe nel lungo periodo . . . 64
4.37 Autopilota Vz: confronto risposte di δth nel corto periodo . . . 65
4.38 Autopilota Vz: confronto risposte di δth nel lungo periodo . . . 65
4.39 Schema dell’autopilota della quota H . . . 66
4.40 Luogo delle radici di H/δe: alta frequenza . . . 68
4.41 Luogo delle radici di H/δe: bassa frequenza . . . 68
4.42 Diagramma di Bode generalizzato di H/δe . . . 69
4.43 Diagramma di Bode in ciclo chiuso H/Href . . . 70
4.44 Risposte temporali a gradino unitario di H: corto periodo . . . 71
4.45 Risposte temporali a gradino unitario di H: lungo periodo . . . 72
4.46 Blocco D del Simulatore Stand Alone con autopilota H . . . . 74
4.47 Blocco D.AUTO.H.de . . . 75
4.48 Autopilota H : confronto risposte della H nel corto periodo . . 76
4.49 Autopilota H : confronto risposte della H nel lungo periodo . . 76
4.50 Autopilota H : confronto risposte di δe nel corto periodo . . . . 77
4.51 Autopilota H : confronto risposte di δe nel lungo periodo . . . 77
4.52 Autopilota H : confronto risposte di δth nel corto periodo . . . 78
4.53 Autopilota H : confronto risposte di δth nel lungo periodo . . . 78
4.54 Schema dello Yaw Damper . . . 81
4.55 Luogo delle radici di r/δr con attuatore: alta frequenza . . . . 82
4.56 Luogo delle radici di r/δr con attuatore: bassa frequenza . . . 82
4.57 Angoli di prua ψ e di derapata β . . . 83
4.58 Schema dell’autopilota della ψ . . . 84
4.59 Luogo delle radici di ψ/δa: alta frequenza . . . 86
4.60 Luogo delle radici di ψ/δa: bassa frequenza . . . 86
4.61 Diagramma di Bode generalizzato di ψ/δa . . . 87
4.62 Diagramma di Bode in ciclo chiuso ψ/ψref . . . 88
4.63 Risposte temporali a gradino unitario di ψ: tempi brevi . . . . 89
4.64 Risposte temporali a gradino unitario di ψ: tempi lunghi . . . 90
4.65 Blocco D del Simulatore Stand Alone con autopilota ψ . . . . 92
4.66 Blocco D.AUTO.psi.da . . . 93
4.67 Blocco B.AUTO.psi.da . . . 94
4.71 Autopilota ψ: confronto risposte di δa nei tempi lunghi . . . . 96
4.72 Angolo di rotta η . . . 97
4.73 Schema dell’autopilota della η con δr . . . 98
4.74 Luogo delle radici di η/δr: alta frequenza . . . 100
4.75 Luogo delle radici di η/δr: bassa frequenza . . . 100
4.76 Diagramma di Bode generalizzato di η/δr . . . 101
4.77 Diagramma di Bode in ciclo chiuso η/ηref . . . 102
4.78 Risposte temporali a gradino unitario di η: tempi brevi . . . . 103
4.79 Risposte temporali a gradino unitario di η: tempi lunghi . . . 104
4.80 Blocco D del Simulatore Stand Alone con autopilota η . . . . 106
4.81 Blocco D.AUTO.eta.dr . . . 107
4.82 Blocco B.AUTO.eta.dr . . . 108
4.83 Autopilota η: confronto risposte della η nei tempi brevi . . . . 109
4.84 Autopilota η: confronto risposte della η nei tempi lunghi . . . 109
4.85 Autopilota η: confronto risposte di δr nei tempi brevi . . . 110
4.86 Autopilota η: confronto risposte di δr nei tempi lunghi . . . . 110
4.87 Manovra di circling . . . 111
4.88 Manovra di virata . . . 112
4.89 Schema dell’autopilota del circling . . . 113
4.90 Luogo delle radici di φ/δa: alta frequenza . . . 115
4.91 Luogo delle radici di φ/δa: bassa frequenza . . . 115
4.92 Diagramma di Bode generalizzato di φ/δa . . . 116
4.93 Diagramma di Bode in ciclo chiuso φ/φref . . . 117
4.94 Risposte temporali a gradino unitario di φ: tempi brevi . . . . 118
4.95 Risposte temporali a gradino unitario di φ: tempi lunghi . . . 119
4.96 Blocco D del Simulatore Stand Alone con autopilota φ . . . . 121
4.97 Blocco D.AUTO.phi.da . . . 122
4.98 Autopilota φ: risposta del raggio del circling nei tempi brevi . 123 4.99 Autopilota φ: risposta del raggio del circling nei tempi lunghi 123 4.100Autopilota φ: risposta di φ nei tempi brevi . . . 124
4.101Autopilota φ: risposta di φ nei tempi lunghi . . . 124
4.106Monitoraggio del territorio . . . 127
4.107Autopilota circling e Vz: risposta del raggio nei tempi lunghi . 128 4.108Autopilota circling e Vz: risposta di H nei tempi lunghi (H0 = 1000m) . . . 128
4.109Autopilota circling e Vz: risposta della Vz nei tempi lunghi . . 129
4.110Autopilota circling e Vz: risposta di φ nei tempi lunghi . . . . 129
4.111Autopilota circling e Vz: risposta di δa nei tempi lunghi . . . . 130
4.112Autopilota circling e Vz: risposta di δe nei tempi lunghi . . . . 130
4.113Rilevamento polare . . . 132
4.114Navigazione verso un waypoint . . . 133
4.115Traiettoria verso un waypoint . . . 134
4.116Schema dell’autopilota della navigazione verso un waypoint . . 135
4.117Luogo delle radici di η/δa: alta frequenza . . . 137
4.118Luogo delle radici di η/δa: bassa frequenza . . . 137
4.119Diagramma di Bode generalizzato di η/δa. . . 138
4.120Diagramma di Bode in ciclo chiuso η/ηref . . . 139
4.121Risposte temporali a gradino unitario di η: tempi brevi . . . . 140
4.122Risposte temporali a gradino unitario di η: tempi lunghi . . . 141
4.123Blocco D del Simulatore Stand Alone con autopilota di navi-gazione verso un waypoint . . . 143
4.124Blocco D.AUTO.eta.da . . . 144
4.125Blocco D.1 . . . 145
4.126Blocco D.2 . . . 145
4.127Blocco D.3 . . . 146
4.128Autopilota della navigazione verso il waypoint B: risposta della distanza da B nei tempi lunghi . . . 147
4.129Autopilota della navigazione verso il waypoint B: traiettoria . 147 4.130Autopilota della navigazione verso il waypoint B: risposta di η nei tempi lunghi . . . 148
4.131Autopilota della navigazione verso il waypoint B: risposta della quota nei tempi lunghi . . . 148
4.132Autopilota della navigazione verso il waypoint B: risposta di δa nei tempi brevi . . . 149
4.134Sfasamento dei segnali emessi dalla stazione VOR . . . 150
4.135DME: distanza obliqua . . . 151
4.136Relazioni geometriche per l’autopilota di navigazione VOR . . 152
4.137Blocco D del Simulatore Stand Alone con autopilota di navi-gazione VOR . . . 154
4.138Autopilota della navigazione VOR: traiettoria . . . 156
4.139Autopilota della navigazione VOR: risposta di η nei tempi lunghi157 4.140Autopilota della navigazione VOR: distanza dal radiale . . . . 157
4.141Autopilota della navigazione VOR: deviazione dalla radiale . . 158
4.142Autopilota della navigazione VOR: distanza dal punto di ar-rivo B . . . 158
5.1 Schema dei Sottosistemi del FMS . . . 160
5.2 FMS . . . 161 5.3 Blocco F . . . 162 5.4 Blocco F.2 . . . 163 5.5 Blocco F.3 . . . 164 5.6 Sottosistema Autopilota . . . 166 5.7 Blocco F.1 . . . 167 5.8 Blocco F.1.5 . . . 168 5.9 Blocco F.1.5.1 . . . 168 5.10 Blocco F.1.5.1.1 . . . 169 5.11 Blocco F.1.5.1.1.1 . . . 170 5.12 Blocco F.1.2.2 . . . 171 5.13 Blocco F.1.2.1 . . . 171 5.14 Blocco F.1.2.1.1 . . . 172 5.15 Blocco F.1.2.1.1.1 . . . 173 5.16 Blocco F.1.1 . . . 175 5.17 Blocco F.1.1.1 . . . 176 5.18 Blocco F.1.1.1.1 . . . 176 5.19 Blocco F.1.1.1.1.1 . . . 177 5.20 Blocco F.1.1.2 . . . 178
5.24 Blocco F.1.3 . . . 182 5.25 Blocco F.1.3.1 . . . 183 5.26 Blocco F.1.3.1.1 . . . 183 5.27 Blocco F.1.3.1.1.1 . . . 184 5.28 Blocco F.1.4 . . . 185 5.29 Blocco F.1.4.1 . . . 186 5.30 Blocco F.1.4.1.1 . . . 186 5.31 Blocco F.1.4.1.1.1 . . . 187 5.32 Blocco F.1.6 . . . 188 5.33 Blocco F.1.6.1 . . . 189 5.34 Blocco F.1.6.1.1 . . . 189 5.35 Blocco F.1.6.1.1.1 . . . 190 5.36 Blocco F.1.6.1.1.1.1 . . . 190 5.37 Blocco F.1.6.1.2 . . . 190 5.38 Blocco F.1.7 . . . 191 5.39 Blocco F.1.7.1 . . . 191 5.40 Blocco F.1.7.1.1 . . . 192 5.41 Blocco F.1.7.1.1.1.2 . . . 193 5.42 Blocco Correzione . . . 194 5.43 Blocco F.1.7.1.1.1 . . . 195 5.44 Blocco F.1.7.1.1.1.1 . . . 196 5.45 Blocco F.1.8 . . . 197 5.46 Blocco F.1.8.1 . . . 197 5.47 Blocco F.1.8.1.1 . . . 198 5.48 Blocco F.1.8.1.1.1 . . . 199 5.49 Blocco F.1.8.1.1.1A . . . 200 5.50 Blocco F.1.8.1.1.1A1 . . . 201 5.51 Blocco F.1.8.1.1.1A2 . . . 201 5.52 SUBSYSTEM 1 . . . 202 5.53 SUBSYSTEM 2 . . . 202 5.54 Blocco F.1.8.1.1.1B . . . 203
6.4 Navigazione per waypoints: traiettoria . . . 209
6.5 Navigazione per waypoints: H . . . 209
6.6 Navigazione per waypoints: IAS . . . 210
6.7 Navigazione per waypoints: climb speed . . . 210
6.8 Circling: traiettoria . . . 212
6.9 Circling: H . . . 212
6.10 Circling: climb speed . . . 213
6.11 Circling: raggio . . . 213
6.12 Circling: IAS . . . 214
6.13 Circling: angolo di rollio . . . 214
6.14 Navigazione VOR: traiettoria . . . 216
6.15 Navigazione VOR: H . . . 217
6.16 Navigazione VOR: IAS . . . 217
6.17 Autopilota IAS: IAS . . . 219
6.18 Autopilota IAS: climb speed . . . 219
6.19 Autopilota heading: ψ . . . 221
6.20 Autopilota heading: β . . . 221
6.21 Autopilota heading: climb speed . . . 222
6.22 Autopilota heading: IAS . . . 222
6.23 Autopilota heading: H . . . 223
6.24 Autopilota course: η . . . 224
6.25 Autopilota course: β . . . 225
6.26 Autopilota course: climb speed . . . 225
6.27 Autopilota course: IAS . . . 226
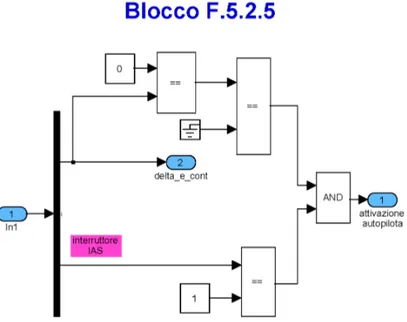
6.28 Autopilota course: H . . . 226 B.1 Blocco F.5.2 . . . 237 B.2 Blocco F.5.2.1 . . . 238 B.3 Blocco F.5.2.2 . . . 238 B.4 Blocco F.5.2.3 . . . 239 B.5 Blocco F.5.2.4 . . . 239 B.6 Blocco F.5.2.5 . . . 240
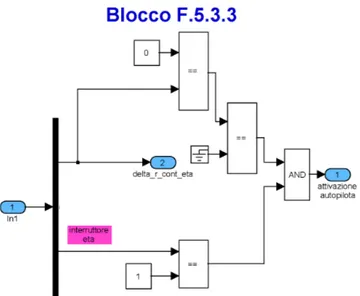
B.10 Blocco F.5.3.3 . . . 243
B.11 Blocco F.5.3.4 . . . 243
B.12 Blocco F.5.3.5 . . . 244
B.13 Blocco F.5.3.6 . . . 244
Elenco delle tabelle
4.1 Condizioni di volo . . . 29
4.2 Poli piano longitudinale in ciclo aperto . . . 30
4.3 Guadagni di chiusura del pitch damper . . . 32
4.4 Guadagni di chiusura dell’autothrottle . . . 36
4.5 Caratteristiche dell’autopilota della IAS . . . 39
4.6 Caratteristiche dell’autopilota della Vz . . . 53
4.7 Caratteristiche dell’autopilota della quota H . . . 67
4.8 Poli piano latero-direzionale in ciclo aperto . . . 79
4.9 Guadagni di chiusura dello Yaw Damper . . . 81
4.10 Caratteristiche dell’autopilota della ψ . . . 85
4.11 Caratteristiche dell’autopilota della η . . . 99
4.12 Caratteristiche dell’autopilota della φ . . . 114
4.13 Caratteristiche dell’autopilota della navigazione verso un way-point . . . 136
Elenco degli acronimi
UAV Uninhabited Aerial Vehicle
SCAUT Sistema di Controllo AUtomatico del Territorio DIA Dipartimento di Ingegneria Aerospaziale
LMV Laboratorio di Meccanica del Volo FMS Flight Management System
GCS Ground Control Station UDP User Datagram Protocol RPM Round Per Minute ngs numero giri al secondo s.l.m. sul livello del mare SFC Specific Fuel Consumption f.d.t. funzione di trasferimento FDT Flight Dynamic Toolbox SAS Stability Augmentation System PM Phase Margin
SISO Single Input Single Output MIMO Multi Input Multi Output PD Proporzionale Derivativo PI Proporzionale Integrativo GPS Global Positioning System GSP Ground SPeed
IAS Indicated Air Speed WP WayPoint
ADF Automatic Direction Finder HSI Horizontal Situation Indicator VOR VHF Omnidirectional Range DME Distance Measuring Equipment