CAPITOLO 6
Verifica sperimentale del sistema di controllo e
conclusioni finali
L’ultima parte del lavoro è stata dedicata all’esecuzione delle verifiche di funzionamento del sistema realizzato, che sono state organizzate in due fasi distinte. Durante la prima fase, effettuata presso il laboratorio della S.E.I. snc, il sistema elettronico è stato analizzato simulando elettricamente l’ambiente motore. Durante la seconda fase, condotta presso il laboratorio di Macchine del Dipartimento di Energetica, il sistema di controllo è stato integrato nel banco di prova corredato anche del carburatore elettronico PHVA 12S.
6.1 Verifica sperimentale del sistema con ambiente motore simulato elettricamente
Grazie alle apparecchiature presenti presso il laboratorio (Oscilloscopio Lecroy LT264
350 MHz 1 GS/s; Alimentatore Agilent 3631A; Generatore di forme d’onda LG FG-7002C) è stato possibile effettuare la verifica degli algoritmi implementati all’interno
del dsPIC30F2010. Sono state condotte delle prove tese a simulare elettricamente l’andamento del motore per diversi regimi di funzionamento. L’uscita del pick – up è stata simulata applicando un segnale ad onda quadra tra i piedini previsti per tale bobina, di ampiezza 10V e frequenza variabile manualmente a step fra 10 Hz (600rpm) e 53.33 Hz (3200 rpm), andando quindi a verificare l’andamento del segnale applicato sulla base del transistore Q1 (vedi fig. 5.17), rappresentante il segnale PWM di pilotaggio del solenoide del carburatore. Nelle figure seguenti si riportano pertanto gli andamenti temporali dei suddetti segnali che confermano l’effettiva realizzazione degli algoritmi implementati. Come si può osservare al variare della frequenza del segnale di uscita del pick–up, il duty cycle del segnale di pilotaggio del solenoide varia in accordo a quanto previsto.
Capitolo 6
Figura 6.1 – Andamento del segnale sulla base di Q1 (1) e del pick-up simulato (2) a 600 rpm
Figura 6.3 – Andamento del segnale sulla base di Q1 (1) e del pick-up simulato (2) a 3000 rpm
Figura 6.4 – Andamento del segnale sulla base di Q1 (1) e del pick-up simulato (2) a 3200 rpm
E’ opportuno sottolineare come nel caso della figura 6.3, non sia apprezzabile tutta l’escursione del duty cycle, che passa in realtà dal valore iniziale del 40% al valore
Capitolo 6
arresto ed una permanenza in tale valore poiché il segnale di pick-up simulato è a frequenza fissa, non influenzato dal progressivo smagrimento della miscela, come invece avviene nelle condizioni reali. Le restanti figure, (figg. 6.1 – 6.2 – 6.4), invece testimoniano il comportamento del sistema al di fuori del range di velocità di interesse [2850;3150]rpm confermando quanto progettato in fase di implementazione degli algoritmi. Inoltre disponendo per queste simulazioni del solo solenoide, separato dal resto del carburatore, è stato anche possibile apprezzarne visivamente l’effettiva pulsazione al variare del duty cycle applicato.
6.2 Verifica del sistema di controllo al banco di prova con motore funzionante
Dopo aver appurato il corretto funzionamento dell’elettronica di controllo in laboratorio, siamo passati ad una fase di verifica al banco di prova corredato con il carburatore PHVA 12S. Obiettivo principale dei test era quello di verificare il corretto interfacciamento del sistema di controllo elettronico con gli altri componenti elettro-meccanici, e di eseguire misure qualitative sul funzionamento di tutto il sistema. Causa le incertezze ancora esistenti sull’effettivo dimensionamento della portata del flusso d’aria supplementare del carburatore e la ristrettezza dei tempi, non è stato possibile estendere le attività fino all’ottimizzazione del sistema completo, con un eventuale perfezionamento degli algoritmi di controllo. Per la conduzione di queste prove si è provveduto all’installazione di un potenziometro analogico da 4.7 kΩ, solidale col comando della farfalla del carburante. L’alimentazione del potenziometro è la stessa applicata al convertitore analogico del dsPIC (Vdd). Inoltre si è provveduto a porre due
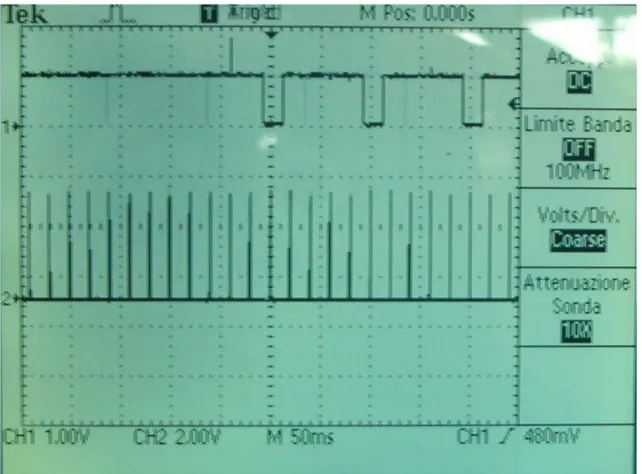
sonde di un oscilloscopio (Tektronix TDS 220) per prelevare il segnale di pick-up, rilevato ai capi di R10 (vedi fig. 5.19) e il segnale di comando del driver del solenoide (base di Q1).
La figura seguente è relativa alla condizione operativa di velocità attorno a 3000 giri/min, con coppia applicata pari ad 1/3 del massimo. Si nota in particolare la transizione dalla situazione di duty cycle 100%, a quella dell’80%. Durante lo stesso test, la sonda λ ha indicato variazioni di circa il 20%, confermando quindi l’effettivo smagrimento della miscela dovuto all’intervento del sistema di controllo sul carburatore.
Figura 6.5 – Misure effettuate a 3000 rpm con carico pari ad 1/3 del massimo (è possibile apprezzare una transizione del duty cycle dal 100% all’80%)
Peraltro, per valori di carico particolarmente bassi, non sono state riscontrate significative variazioni del parametro λ, rispetto a quanto misurato a loop aperto. Non è stato però possibile indagare ulteriormente le cause di tale fenomeno.
Se necessario, il sistema si presta facilmente ad eventuali variazioni nella logica di controllo, alterando soglie e/o range operativi di funzionamento, a causa della flessibilità della soluzione adottata. In tal senso risulta sufficiente modificare unicamente qualche riga del programma implementato.
6.3 Conclusioni
Alla luce dei risultati ottenuti possiamo affermare che il progetto dell’elettronica soddisfa completamente le specifiche, come dimostrato dalle verifiche in laboratorio elettronico. Il sistema completo ha dimostrato un comportamento funzionale in linea con le aspettative per valori medio - bassi di carico. Viceversa dovrà essere oggetto di ulteriori approfondimenti il comportamento per bassi valori di carico. Comunque, grazie
Capitolo 6
del carburatore rilevata con queste prime prove. Inoltre, poiché sono già in via di realizzazione da parte della Dell’Orto i primi prototipi con due distinti flussi d’aria supplementare modulabili, il sistema ben si presta ad essere applicato anche a queste soluzioni più complesse, per le quali riteniamo comunque che il lavoro fin qui svolto, possa costituire una valida base di partenza . Viene infine lasciata aperta alla ricerca la possibilità di includere nel sistema di controllo un ulteriore segnale proveniente da un sensore di basso costo capace di fornire un’informazione sulla dispersione ciclica del motore, nell’intento di ottenere dal sistema una maggiore regolarità di funzionamento.