44
C
APITOLO 3
Componenti e schema elettrico
Dopo aver scelto le grandezze che il data logger deve rilevare e, in linea di massima, la modalità di misura, ci addentreremo nell’analisi delle specifiche di queste grandezze, per poter scegliere i modelli dei vari sensori e la circuiteria elettronica più adatta per il condizionamento dei segnali. Vedremo poi come interfacciare i vari componenti per arrivare a delineare quello che potrebbe essere lo schema elettrico finale del data logger per il motoveicolo.
45
3.1 Definizione delle specifiche
La scelta dei sensori è un’operazione molto importante, che può essere effettuata solamente dopo aver delineato le caratteristiche principali di ogni grandezza sotto misura; in particolare ci interessa stabilire approssimativamente il range e la risoluzione di queste.
Prima di passare a delineare le specifiche, deve essere fatta una precisazione sull’accuratezza che pretendiamo dai nostri sensori: essendo interessati a vedere le variazioni delle grandezze in questione, non si hanno vincoli particolarmente stringenti sull’accuratezza, intesa come errore massimo commesso dal sensore. Siamo più interessati alla sua costanza o comunque alla ripetibilità del sensore, dovendo fare misure ripetute nel tempo e dovendo evidenziare quali siano i parametri che sono maggiormente soggetti a variazione nella MCDD.
Inoltre risulterà utile nel delineamento delle specifiche avere quantificato una durata minima per la MCDD. Questo tempo può essere molto variabile, poiché possono verificarsi situazioni in cui si presenta la necessità di dare la precedenza, o situazioni in cui si può eseguire la svolta senza attendere. Un valore di 3 s per questo tempo minimo, (TMIN), sembra accettabile.
Vediamo ora nel dettaglio le singole grandezze e le specifiche che su ognuna di queste dobbiamo cercare:
Azimuth θ: è sufficiente una risoluzione di 10°, spieghiamone il motivo. θ0 : azimuth dello scooter all’inizio della svolta;
θj : azimuth rilevato ogni Δt costante, ad esempio ogni 0,1 s; Δθj0 = θj - θ0;
46
L’idea è quella di rilevare il valore θ0 e i vari valori θj ad intervalli costanti; successivamente calcolare via software la differenza Δθj0 tra questi; è questo il parametro da analizzare per comprendere il termine della MCDD. In particolare quando Δθj0 supera un valore prestabilito θlim, ad esempio 20°, la manovra può considerarsi terminata e l’indicatore di direzione può essere disattivato. Considerando quindi questi valori per θlim ci si può accontentare di una risoluzione di circa 10°, intesa come minimo incremento rilevabile. Inoltre, se interpretiamo un’inversione di marcia come caso limite e quindi come la svolta più ampia possibile, si può limitare il campo di applicazione ad un range di ±180º.
Velocità: considerando che la manovra può essere effettuata sia con velocità iniziale nulla che con velocità non nulla, un range di 0÷100 km/h può essere sufficiente. Per quanto riguarda la risoluzione, 1 km/h è più che accettabile. Infatti 1 km/h = 0,28 m/s, e possiamo considerare che in circa 30 cm non si abbiano considerevoli variazioni di velocità dello scooter.
Accelerazione: siamo interessati alle componenti che contribuiscono a far variare la traiettoria dello scooter, quelle cioè sul piano orizzontale, la superficie stradale. Facendo un calcolo limite approssimativo, ovvero considerando una variazione da 0 a 100 km/h nel TMIN precedentemente previsto per la svolta, si ottiene un valore di 9,3 m/s2 ovvero di 0,9 g; per cui, in linea con altre applicazioni automotive [17], un range accettabile sembra essere ±g. Per quanto riguarda la risoluzione, come già detto, si può immaginare che non si abbiano variazioni sostanziali della velocità in 0,3 m in un secondo; un caso limite è quello di considerare una variazione di velocità di 0,3 m/s per secondo, quindi in 30 cm, come per la velocità; otteniamo così una
47
valore di 0,3 m/s2, cioè di circa 0,03 g. Il valore di 10-3 g può quindi essere considerato accettabile [5].
Angolo di rollio: in questo caso il range angolare sarà ridotto rispetto all’azimuth. Il caso limite è rappresentato dal mondo delle competizioni, dove si arriva ad angoli di piega di 60º, come nel caso della motoGP; valori questi ben lontani da quelli possibili nel quotidiano uso di uno scooter. Un range che si estende fino a 30º può a ragione essere ritenuto più che sufficiente. Per quanto riguarda la risoluzione la necessità è quella di riuscire a rilevare variazioni anche dell’ordine del grado, in quanto le inclinazioni del motoveicolo non saranno molto ampie.
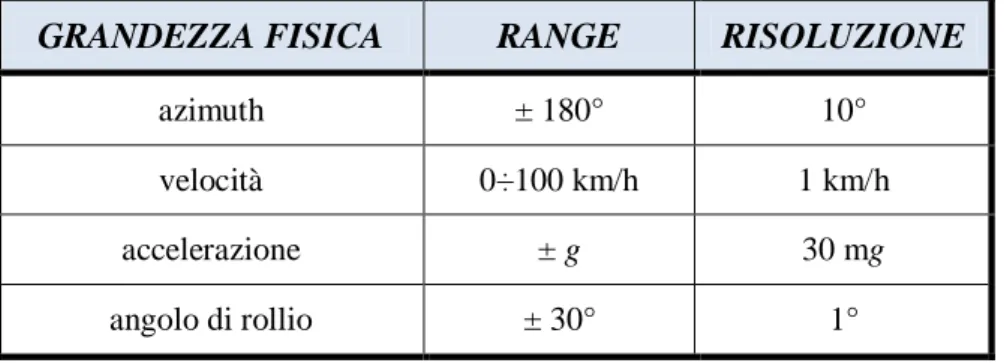
GRANDEZZA FISICA RANGE RISOLUZIONE
azimuth ± 180° 10°
velocità 0÷100 km/h 1 km/h
accelerazione ± g 30 mg
angolo di rollio ± 30° 1°
Tabella 3.1 – Specifiche dei segnali
Un’ultima considerazione deve essere fatta relativamente alla velocità di variazione di queste grandezze fisiche e quindi dei relativi segnali che dovremo rilevare coi sensori. Non avremo a che fare con segnali troppo veloci nelle loro variazioni, ad esempio per le accelerazioni non saremo interessati a quelle vibrazionali, che sono utili per il comfort e che hanno una banda ben più ampia di quelle di nostro interesse. Possiamo considerare significative variazioni che
48
avvengono ogni decimo di secondo: Δt = 0,1 s (frequenza = 10 Hz), quindi considerando il TMIN di svolta avremo un numero minimo di 30 campioni.
f
campionamento > 2 ∙1
𝛥𝑡 = 20 𝐻𝑧 ≈ decine di Hz
3.2 Scelta dei componenti
In questa sezione vediamo i componenti principali che sono stati presi in considerazione e le caratteristiche fondamentali di quelli che poi sono stati effettivamente scelti. Partiamo dall’elemento focale del data logger, ovvero il sensore di Hall.
3.2.1 Sensore di Hall
L’aspetto principale che ci ha fatto optare per un sensore magnetico di Hall è stato sicuramente il basso costo di questa categoria di sensori; il loro prezzo varia da qualche euro fino alla decina di euro, ma come aspetto negativo si rileva una bassa accuratezza; con un sensore di questo tipo dobbiamo accontentarci di una risoluzione di circa 10°-15° [2]. Questa bassa risoluzione è leggermente migliore di quella richiesta dalle specifiche sull’azimuth in relazione all’angolo limite θlim, ma come detto noi vogliamo verificare la possibilità di creare un sistema per il ritorno di freccia che si basi proprio su un
49
sensore a basso costo. Nella Tabella 3.2 viene mostrato un confronto fra quattro sensori ad effetto Hall con uscita lineare.
Casa Produttrice Codice Sensibilità [mv/G] Prezzo [€]
Allegro MicroSystem UGN3503UA 1,3 3.80
AnalogDevice AD22151 0,4 2.50
Honeywell SS495A 3,125 4.00
Melexis MLX90215 Programmabile 11.00
Tabella 3.2 - Confronto tra sensori magnetici ad effetto Hall [2]
Questo confronto viene fatto in termini di prezzo e di sensibilità; dalla tabella si evince che il sensore ad effetto Hall che presenta il miglior compromesso tra costo e sensibilità è il sensore SS495A della Honeywell.
Il sensore SS495A Series MRL (Miniature Ratiometric Linear)
Il sensore ha dimensioni piuttosto ridotte, (3 mm x 4 mm), consuma poca potenza e ha una buona stabilità termica sia per quanto concerne sia la sensibilità sia l’offset. Un sensore di questo tipo ha un proprio offset (Null Output), che si misura in condizioni di campo magnetico nullo; in particolare questo valore per tale modello è, come si vede in figura 3.1, di 2,5 V con alimentazione di 5 V. La tensione di uscita, essendo un sensore raziometrico, dipende dall’alimentazione e ha una buona dinamica, che si discosta tipicamente di 200 mV dal limite superiore e inferiore.
50
Figura 3.1 – Tensione di uscita in funzione del campo magnetico totale [S13]
Internamente sono previsti accorgimenti per limitare gli effetti piezoresistivi e la dipendenza dalla temperatura dell’elemento sensibile. Nel primo caso più elementi di Hall sono collegati in parallelo e geometricamente disposti in modo da produrre effetti opposti e quindi annullarli; nel secondo caso un’opportuna parte di condizionamento del segnale garantisce una buona stabilità alla temperatura. Si minimizzano in questo modo gli effetti sia degli stress meccanici che di quelli termici sull’uscita del sensore. Osservando la tabella 3.3, estratta dal datasheet, si può notare che ad una variazione di 1°C in temperatura, corrisponde una variazione dello 0,06 % del valore dell’offset (Null). Un parametro significativo è anche lo Span del sensore, inteso come il range della tensione di uscita; la linearità espressa come percentuale dello Span, esprime l’errore massimo che si commette assumendo la caratteristica di trasferimento del sensore come perfettamente lineare sull’intero Span.
Il sensore SS495A, alimentato con 5 V, ha una sensibilità di (3,125 ± 0,125) mV/G, sensibilità che può leggermente diminuire con la temperatura; in particolare per un aumento di 1°C si registra una diminuzione di essa dello 0,01 %. V.
51
Il range minimo del campo magnetico rilevabile è (-600 G ÷ 600 G), mentre quello tipico è (-670 G ÷ 670 G); sono valori questi ben più elevati confrontati a quelli del campo magnetico terrestre.
Honeywell - SS495A standard Supply Voltage [VDC] 4,5 ÷ 10,5 @ 25°C
Supply Current [mA] 8,7 Max.
Magnetic Range [G] -600 ÷ 600 Min.
Output Voltage Span [V] 0,4 to (Vs – 0,4) Min.
Linearity [% Span] -1,5 %
Null 2,50 ± 0,075 Output @ 0 Gauss
Temperature Error Null
Drift [%/°C] ± 0,06 % Sensitivity [mV/G] 3,125 ± 0,125
Sensitivity Drfit [%/°C] -0,01% + 0,05% Temperatura ≥ 25°C Tabella 3.3 – Parametri da datasheet per alimentazione a 5 V [S13]
Il campo magnetico terrestre varia la propria intensità sull’intero globo da un massimo di 68000 nT (0,68 G) a un minimo di 24000 nT (0,24 G). La componente di nostro interesse è quella parallela alla superficie terrestre (figura 3.2), che, indicando il nord magnetico, è la base per la realizzazione di bussole magnetiche o compassi elettronici. Il sensore ha come asse sensibile quello perpendicolare al piano del chip; quindi ruotandolo rispetto al piano orizzontale di un angolo α, rileverà la scomposizione del campo sulla perpendicolare suddetta. In questo modo compiendo una rotazione di 360°, ci aspettiamo un andamento sinusoidale della tensione di uscita del sensore.
52
Progettazione della circuiteria di condizionamento del sensore
Abbiamo visto i valori massimi e minimi dell’intensità del campo magnetico terrestre, ma nella progettazione facciamo riferimento ai valori di questo alle nostre latitudini. Questi valori sono stati rilevati dalla British Geological Survey, la quale fornisce dati relativi alle varie componenti del campo magnetico terrestre ogni anno. In particolare il sito di questa organizzazione fornisce la possibilità di risalire alle informazioni suddette in ogni luogo del globo terrestre; è sufficiente inserire latitudine e longitudine della località di interesse e si ottengono le informazioni relative al campo magnetico.
Vediamo i dati relativi alla città di Pisa e dell’anno 2005, facendo riferimento anche alla figura 3.2:
53
intensità campo magnetico terrestre : He = 0,466 G; inclinazione campo magnetico terrestre: δ = 59,87 °;
componente orizzontale del campo magnetico: Heh = 0,234 G componente del campo rilevata dal sensore: Hex ;
Hex = 𝐻𝑒 ∙ cos δ ∙ cos 𝛼 = Heh ∙ cos 𝛼 (1)
𝛥𝑉 𝑜𝑢𝑡 = Heh ∙ cos 𝛼 ∙ 𝑆 (2)
𝑉𝑚𝑎𝑥 = Heh ∙ cos 0° ∙ 𝑆 ≈ 0,73 𝑚𝑉 (3)
La formula (1) mostra la scomposizione del campo magnetico terrestre e evidenzia la componente rilevata col sensore; la (2) mostra la dipendenza dal campo magnetico della tensione di uscita del sensore; S rappresenta la sensibilità di esso (S = 3,125 mV/G). In particolare nella formula (3) abbiamo considerato il valore massimo, quindi azimuth nullo e asse sensibile del sensore coincidente con la direzione del nord magnetico.
Come già accennato in precedenza e come si nota dal valore ottenuto, si presenta la necessità di utilizzare uno stadio di amplificazione per ottenere una tensione maggiormente gestibile. Inoltre considerando che abbiamo a che fare con un segnale analogico, procederemo ad una conversione utilizzando il convertitore del microcontrollore.
54
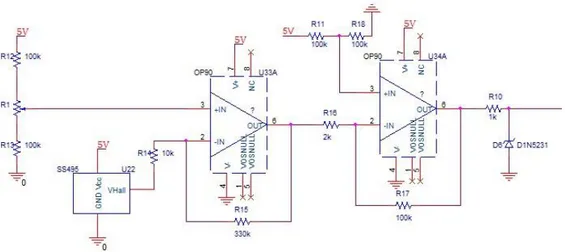
Vediamo nel dettaglio il circuito di condizionamento del segnale in uscita dal sensore di Hall.
Figura 3.4 – Circuito di condizionamento del segnale del sensore
A causa della dinamica del sensore, che è centrata sull’offset di 2,5 V, il segnale che ci porta informazione sulla direzione del campo magnetico e che come visto è del ordine delle frazioni di millivolt, sarà sommato a questo offset. In particolare avremo valori superiori o inferiore all’offset, in funzione del verso del campo magnetico e quindi del segno del coseno dell’azimuth. L’idea è quella di utilizzare uno stadio di amplificazione che abbia la medesima dinamica del sensore; ciò è possibile utilizzando amplificatori operazionali e alimentandoli tra 0 e 5 V in modo da creare un ground virtuale nell’intorno dei 2,5 V. In particolare divideremo in due stadi questo blocco di amplificazione per riuscire con esso a portare il segnale in uscita dal sensore nella dinamica del convertitore.
55
In particolare utilizzando la tensione interna di 2,56 V, per la dinamica del convertitore, sarà necessaria un’amplificazione di circa 1750, come si vede dalla formula (4); tale amplificazione sarà suddivisa in due stadi. Per quanto riguarda il primo stadio abbiamo un amplificatore operazionale in configurazione invertente; inoltre sul terminale non invertente è presente il riferimento virtuale, realizzato con due resistenze ed un potenziometro, per avere la possibilità di regolarlo nell’intorno di 2,5 V. Anche il secondo stadio è in configurazione invertente e produce un’uscita adatta ad essere inviata al convertitore.
Infine in uscita al secondo amplificatore è stata prevista una circuiteria di protezione per l’ingresso del microcontrollore: una resistenza da 1 kΩ per limitare la corrente e un diodo zener con Vz di 2,7 V che limiti le sovratensioni.
3.2.2 Ricevitore GPS
Vediamo alcuni modelli di GPS di varie case produttrici e confrontiamoli rispetto ai loro parametri principali. La tabella 3.4 raccoglie questi modelli, poi successivamente vengono spiegati quelli che sono i parametri di maggiore interesse per la scelta del componente per il nostro data logger.
56 Casa Produttrice
&
Caratteristiche Delorme Semtech RFsolutions
Modello GPS2056-10 RGPSM002 LS-40EB Alimentazione [V] 3,0 ÷ 3,6 3,0 ÷ 3,6 3,3 or 5 H,W,C start time [s] 1, 38, 114 12, 32, 120 < 10, < 35, < 45 Numero canali 12 12 12 Accuratezza [m/s] 0,1 - 0,1 Accuratezza [m CEP] 10 5 5 Consumo [mW] 180 75 220
Protocollo NMEA 0183 NMEA-0183
v3.00 NMEA-0183 v3.01 Interfaccia RS232 UART LVTTL Firmware programmabile no si no
Tecniche di correzione DGPS (otpional) DGPS (1m) WAAS, EGNOS
Antenna esterna esterna esterna
Prezzo [€] 26 € 102 € 59 €
57 Casa Produttrice
& Caratteristiche
Qinetic Garmin RFsolutions
Modello Q20 GPS 15 L GPS-41MLR/F1 Alimentazione [V] 3,0 ÷ 3,6 3,3 ÷ 5 3,8 ÷ 8,0 H,W,C start time [s] < 1, < 38, < 45 -,15, 45 < 10, < 35, < 50 Numero canali 12 12 12 Accuratezza [m/s] 0,05 0,1 0,1 Accuratezza [m CEP] < 5 < 15 , 95% 5 Consumo [mW] 435 220 110
Protocollo NMEA-0183 NMEA-0183
v2.20
NMEA-0183 v3.01
Interfaccia 3 UART ports UART LVTTL
RS232
Firmware
programmabile si si no, si
Tecniche di correzione WAAS, EGNOS WAAS, EGNOS
Antenna esterna esterna interna, esterna
Prezzo 75 € 80 € 60 €
Tabella 3.4 b - Confronto tra ricevitori GPS [S18,S19,S20]
1
GPS-41MLR e GPS-41MLR/F sono due modelli leggermente differenti, cosicchè nella tabella ove compaiono due dati separati da virgola facciamo riferimento rispettivamente al primo e poi al secondo modello; nel caso di un solo dato significa che per quel paramero non vi sono differenze tra i due ricevitori.
58
Nella scelta del ricevitore sono stati presi in considerazione differenti aspetti, dall’accuratezza al prezzo, dall’interfaccia alle caratteristiche dell’antenna. Spieghiamo il significato di alcuni dei parametri più specifici dei ricevitori GPS:
Start time: rappresenta il tempo che impiega all’accensione il ricevitore per collegarsi ad un numero di satelliti sufficiente alla ricezione del segnale e al calcolo della prima posizione. Esistono tre tipi di start time: cold start, warm start e hot start, che corrispondono a tre stati differenti in cui può trovarsi il ricevitore all’accensione. Nel primo caso il GPS non ha dati iniziali da cui partire e perciò impiegherà un tempo più lungo per il calcolo della prima posizione; nel secondo possiede informazioni sulla posizione, sul tempo e sugli almanacchi2 (almanac data); nel terzo caso oltre alle informazioni appena dette dispone anche delle effemeridi3 (ephemeris), impiegando il minor tempo possibile [6].
Numero canali: indica il numero dei canali, ovvero il numero di segnali GPS che possono essere elaborati in parallelo.
Accuracy position: indica l’accuratezza con cui viene calcolata la posizione; in particolare, solitamente, si indica il valore del raggio della circonferenza entro il quale giace il 50 % delle posizioni calcolate e il cui centro coincide con la posizione effettiva. Ad esempio 10 m CEP
2
Gli Almanac data contengono le posizioni approssimate dei satelliti; sono costantemente trasmessi e memorizzati nel ricevitore.
3
Gli Ephemeris data contengono l’esatta posizione dei satelliti. Per ottenere un’accurata informazione su tale posizione, il ricevitore deve sapere quanto sia lontano il satellite. Per calcolare tale distanza il ricevitore GPS utilizza segnali provenienti dal satellite stesso.
59
(circular error probable) senza SA4, sta a significare che tale cerchio ha raggio 10 m in caso di SA non attivo (figura 3.5). Esistono poi metodi per migliorare l’accuratezza dei ricevitori, come il DGPS, che utilizzando una serie di postazioni stazionarie, invia delle correzioni agli errori tipici del GPS, o come il supporto del WAAS (Wide Area Augmentation System), che è un sistema di navigazione sviluppato per l’aviazione civile e che combina le informazioni dei satelliti con quelle ottenute da postazioni a terra. Tale sistema è utilizzato in America, ma esistono i corrispettivi anche in Europa ed in Asia: (EGNOS) European Euro Geostationary Navigation Overlay Service e (MSAS) Japanese Multi-Functional Satellite Augmentation System. Sempre per migliorare l’accuratezza esistono tecniche di postprocessing, che consistono nell’applicare opportuni software ai dati raccolti durante il funzionamento del GPS.
Figura 3.5 - Accuratezza nei GPS e WAAS accuracy [S20]
4
SA significa selective availability ed è una tecnica sviluppata da governo degli Stati Uniti per ridurre l’accuratezza dei ricevitori GPS nelle applicazioni civili. In pratica venivano introdotti dei disturbi sul segnale, che erano eliminabili esclusivamente dalle organizzazioni militari e che limitavano l’accuratezza sulla posizione a 100 m. Nel maggio del 2000 la SA è stata abolita, rendendo accessibile a tutti l’efficienza dei ricevitori GPS e allargando enormemente i campi di applicazione di essi. [6]
60
Firmware programmabile: il protocollo tipico dei ricevitori GPS è NMEA che vedremo meglio in seguito; questo è costituito da un elevato numero di frasi che forniscono svariate informazioni. Per poterle selezionare è necessario poter programmare il firmware del ricevitore, altrimenti possono essere lette solamente quelle di default, cioè quelle stabilite dal costruttore.
Antenna: l’antenna nella maggior parte dei modelli deve essere acquistata separatamente e talvolta vi è anche la necessità di aggiungere uno stadio di amplificazione a basso rumore. Dalla tabella si evidenzia infatti un solo modello in cui l’antenna è interna (onboard antenna).
RFsolutions GPS 41-MLR
I ricevitori appena visti, date le loro caratteristiche, sono tutti compatibili con la nostra applicazione, tuttavia le considerazioni che seguono hanno suggerito la scelta di questo componente.
61
1) Antenna: la presenza dell’antenna onboard, evita problemi legati alla connessione di un elemento esterno ed elimina costi aggiuntivi per il ricevitore; il compromesso da accettare è la minore flessibilità del ricevitore, in quanto non vi è possibilità di cambiare l’antenna.
2) Prezzo: ci troviamo di fronte ad un prezzo intermedio tra modelli
costosi e altri particolarmente economici, ma il rapporto prezzo/prestazioni ci è sembrato buono.
3) Accuratezza: si arriva a definire la posizione con una precisione adatta
per la nostra applicazione e ad ogni modo sono possibili anche tecniche di correzione.
4) Consumo di potenza: il ricevitore scelto è tra quelli a minor consumo, e
questo può essere una cosa utile, dal momento che il data logger sarà alimentato con la batteria dello scooter.
Per quanto riguarda lo start time, esso non è un parametro di particolare interesse, poiché il GPS sarà attivo dall’accensione del data logger fino alla termine delle rilevazioni, perciò un tempo di attesa iniziale non è limitante per le prestazioni. Stesso discorso vale per il firmware programmabile, poiché le informazioni ricavabili dalle frasi del protocollo NMEA, previste dal ricevitore, sono sufficienti per i nostri scopi. Vediamo qualcosa di più su questo protocollo.
62 Protocollo NMEA 0183
Il protocollo NMEA 0183 è uno standard di interfacciamento tra apparecchiature digitali; il sistema ha origini e finalità prevalentemente nautiche, viene utilizzato ad esempio, per sistemi di autopilota di imbarcazioni. Nell'ambito del GPS, il protocollo NMEA viene prevalentemente impiegato per trasmettere dati da un ricevitore GPS verso un computer. Esistono moltissimi altri protocolli di dati generati da un ricevitore GPS; in effetti ogni costruttore di GPS ha il suo: Trimble, SiRF, Garmin, Rockwell; tuttavia il formato NMEA è efficiente, facilmente interpretabile "a occhio nudo" e altrettanto facilmente decodificabile dal software di un elaboratore, e soprattutto è, appunto, uno standard [S21].
Lo standard non prevede connettori particolari come nel caso delle interfacce seriali RS232 dei computer; i collegamenti fra le varie unità vengono fatti usando unicamente due fili, uno che trasporta il segnale e uno di ritorno; più unità riceventi (listeners) possono poi essere collegate insieme ad un unico sistema trasmettitore (talker). In particolare lo standard prevede che il segnale elettrico emesso dal talker sia sufficiente per 4 listeners. Molto spesso è presente anche l’interfaccia RS232 per la connessione ai comuni computer. Infatti, osservando le caratteristiche elettriche di questo protocollo di comunicazione esiste un certo livello di compatibilità con il protocollo seriale RS232. Lo stato logico UNO è definito da una differenza di tensione tra i due fili minore di +0,5 V, mentre lo stato logico ZERO è definito da una tensione maggiore di +4 V.
La velocità con cui i dati vengono trasmessi nello standard NMEA è 4800 Baud, usando caratteri ASCII a 8 bit. La trasmissione inizia con un bit di start (zero logico), seguito da 8 bit di dati e un bit di stop (uno logico) aggiunto alla fine. Non è usato il bit di parità.
Vediamo in dettaglio la struttura delle frasi NMEA, con riferimento alle parti significative. Tutte le frasi NMEA sono costituite da una sequenza di caratteri ASCII; la struttura basilare è formata da un prefisso, una serie di campi
63
informativi, separati da virgole, e da un checksum finale per un totale di 79 caratteri. Ad essi si aggiungono altri 3 caratteri, che potremmo definire “delimitatori”, in quanto delimitano l'inizio e la fine della frase: il carattere "$" determina l’inizio, la sequenza <CR> >LF> sancisce la fine, per un totale di 82 caratteri.
Campo Descrizione
$ inizio di ogni frase
GP sono i primi due caratteri del Prefisso e identificano il dispositivo con protocollo NMEA che genera la frase (talker) GLL
sono gli ultimi caratteri del Prefisso e identificano il tipo di
informazione contenuta nei dati trasmessi. Esempio: GLL = Geographic position, Longitude and Latitude
,Dati,..,Dati,5 sono i dati trasmessi , separatore tra i vari dati
* separatore per il checksum
CS6 checksum per poter individuare eventuali errori <CR><LF> fine di ogni frase
Tabella 3.5 – Elementi tipici delle frasi NMEA [S21]
5
Nel caso in cui i dati per un campo non siano disponibili, il campo viene omesso, ma le virgole che lo delimiterebbero sono comunque aggiunte, senza spazi tra di loro.
6
Il checksum è lo XOR a 8-bit (senza i bit di start o stop) di tutti i caratteri della frase NMEA, compresi i delimitatori "," , ma escludendo i delimitatori "$" e "*". Il valore esadecimale dei 4 bit più significativi e dei 4 meno significativi del risultato vengono convertiti in due caratteri ASCII (0-9, A-F). Il carattere più significativo è quello che viene trasmesso per primo.
64
Un esempio di stringa con informazioni relative alla latitudine e alla longitudine (GLL), è la seguente:
$GPGLL,4717.115,N,00833.912,E,130304.0,A*33<CR><LF>
Possono essere distinte tutte le varie parti di una tipica frase NMEA e in particolare nella tabella sottostante vengono spiegati tutti i campi dato: latitudine, emisfero, longitudine e verso della posizione attuale, oltre al tempo universale e allo stato del dispositivo.
Campo Formato Esempio Descrizione
1 1111.11 4717.15 Latitudine posizione attuale [numero decimale]
2 A N Emisfero posizione attuale: N = Nord,
S = Sud
3 1111.11 00833.91 Longitudine posizione attuale [numero
decimale]
4 A E Verso posizione attuale E = Est, W = Ovest
5 hhmmss.ss 130304.03 UTC (Coordinat Universal Time), ora
universale
6 A A Stato: A = Active, V = Void
Tabella 3.6 – Informazioni dei dati GLL [S21]
Il GPS ha diversi tipi di frasi predefinite, ciascuno dei quali è utile per ottenere varie informazioni. In particolare per il nostro progetto ci servirà utilizzare il GPS anche per valutare le variazioni di velocità del motoveicolo, potendo risparmiare cosi sul sensore di velocità.
65
3.2.3 Altri componenti
Completiamo la rassegna degli altri componenti costituenti il data logger.
Accelerometro STMicroelettronics LIS3LV02DQ
Questo accelerometro si trova ad un prezzo di circa 10 euro e garantisce buone prestazioni; rilevando l’accelerazione sui tre assi può essere utilizzato anche come inclinometro. Per ogni asse, le accelerazioni agiscono su micro masse libere di muoversi lungo la rispettiva direzione, ancorate in un punto fisso. Tali micro masse fanno parte di una capacità variabile, in particolare ne rappresentano l’armatura in grado di spostarsi in base alle accelerazioni. Queste ultime divengono variazioni di capacità ad esse proporzionali, dell’ordine di alcuni femtofarad rispetto al valore di alcuni picofarad con accelerazioni nulle. Alle massime accelerazioni si ottengono variazioni fino a 100 fF. Internamente i segnali che identificano le variazioni capacitive, una per ogni asse, sono instradati da un multiplexer su un amplificatore di carica a basso rumore; successivamente un demultiplexer recupera i contributi sui singoli assi e li invia a dei convertitori ΣΔ; il filtro di ricostruzione, poi, elimina le componenti ad alta frequenza e pulisce il segnale dal rumore. Infine si ha l’interfaccia con l’esterno e la possibilità di scegliere tra SPI e I2
C; noi utilizzeremo la prima e alterneremo il flusso di dati in uscita dal sensore con la scrittura sulla memoria.
L’accelerometro sarà alimentato alla tensione di 3,3 V per un facile interfacciamento col microcontrollore, come vedremo meglio in seguito. Esiste la possibilità di programmare il fondo scala, a ± 2 g o a ± 6 g; per la nostra applicazione la prima opzione è più che sufficiente.
66 Memoria SD
Le opzioni disponibili per la memorizzazione sono molteplici e molto variabili sia in prezzo che in capacità. La cosa più comoda per non avere vincoli legati alle dimensioni della memoria, è quella di utilizzare una memoria SD sul data logger e svuotarla su un supporto di memorizzazione fisso al termine di ogni sessione di logging. Ciò è possibile sia perché le informazioni da noi memorizzate non hanno grosse dimensioni sia perché le sessioni di logging non prevedono prove troppo particolari ed eccessivamente lunghe. In particolare considerando al max 8 bit per segnale e 656 bit (8 bit ∙ 82 caratteri) per il protocollo NMEA, si ottiene un contenuto informativo di una novantina di byte ogni decimo di secondo; quindi per una sessione di trenta minuti si arriva ad avere qualche megabyte di informazioni. La nostra scelta si è orientata sulle memorie SD, che hanno contatti superficiali e quindi sono molto robuste, hanno buone velocità di trasmissione e capacità elevate. Per quanto riguarda l’interfacciamento con il microcontrollore si è pensato di collegarla tramite l’interfaccia SPI, come per l’accelerometro. L’idea è quella di scrivere sulla memoria, sfruttando la possibilità di pilotare più dispositivi slave in parallelo attraverso il medesimo dispositivo master.
Microcontrollore AT90CAN32
Una priorità nella scelta del microcontrollore è stata la presenza di un convertitore analogico-digitale e la disponibilità di varie interfacce di comunicazione, per permettere maggiore flessibilità nei collegamenti con le altre parti del data logger. In particolare sono presenti 2 interfacce USART, un’interfaccia SPI, una TWI, ma soprattutto c’è la possibilità di sfruttare il protocollo CAN, molto utilizzato in ambiente automotive. Non sarà utilizzato nell’ambito di questo progetto, ma abbiamo pensato che per sviluppi futuri un simile protocollo per il motoveicolo possa risultare utile.
67
Alimentazione: è possibile scegliere una tensione DC compresa nel range 2,7 ÷5,5 V; ci siamo orientati per una tensione regolata di 3,3 V, per poter interfacciare il microcontrollore direttamente con la porta UART del GPS (LVTTL), evitando così di dover ricorrere ad una circuiteria di adattamento della tensione. Questo comporta l’utilizzo di una frequenza di clock inferiore meno elevata, ma, non avendo un programma di controllo particolarmente complesso, non rappresenta un problema.
Convertitore: si è pensato di utilizzarlo ad 8 bit , prendendo come tensione di riferimento quella interna del valore di 2,56 V. In questo modo con la circuiteria di condizionamento del segnale in uscita dal sensore è possibile avere questo nella dinamica del convertitore; inoltre per i nostri scopi 8 bit → 256 livelli → 10 mV di risoluzione sono sufficienti.
Regolatore
I componenti presenti sul data logger hanno bisogno di tensione stabilizzata; in particolare 5 V per alcuni, 3,3 V per altri. Più precisamente il ricevitore GPS e il sensore di Hall vengono alimentati con la prima, mentre accelerometro, microcontrollore e memoria SD con la seconda. Abbiamo così scelto due regolatori lineari, avendo a che fare con basse potenze: il primo è il modello LP2954 della National Semiconductor, mentre il secondo è il MAX604 della Maxim.
68 Amplificatori Operazionali
Sono stati degli operazionali modello OP90 dell’Analog Devices, che sono degli amplificatori di precisione, con una buona dinamica ed una bassa corrente di alimentazione dell’ordine dei 20µA.
Fotoaccoppiatore
Questo elemento è utile per la sezione del circuito che ha il compito di rilevare il segnale delle frecce. In particolare abbiamo pensato di collegarlo direttamente alla lampadina dell’indicatore di direzione, ottenendo in tal nodo sia un isolamento galvanico da questa sia la rilevazione del segnale dell’indicatore stesso. Infatti collegandolo ad un pull-up, come si vede in figura 3.8, avremo un segnale alto quando la freccia è attiva, un segnale basso nel caso opposto; questo segnale, poi, potrà essere inviato direttamente ad un ingresso del microcontrollore, avendo pensato di collegare il pull-up ad una tensione di 3,3 V.
69
3.3 Lista componenti
Q Ref. Componente Descrizione Valore
1 D7 diodo Motorola 1N4933 Vz = 1V,
IF = 1 A
1 D1 fotoaccoppiatore Infineon SFH615A-2
1 D5 diodo zener Motorola Vz = 15 V
1 D6 diodo zener Motorola D1N5231 Vz = 2,7 V
1 U25 regolatore National Semiconductor LP2954 5V
1 U29 regolatore Maxim Max604 3,3 V
1 U12 sensore magnetico Honeywell SS495
1 C11 condensatore 1 µF
1 C12 condensatore 2,2 µF
1 C17 condensatore 10 µF
1 C3 condensatore 10 µF
1 C4 condensatore 100 nF
1 U16 modulo bluetooth Promi ESD02
2 U23,U24
amplificatori operazionali di
precisione
Analog Devices OP90 2 R2,R3,R4,
R6,R9 resistenza 10 kΩ
2 R5,R7 resistenza 330 kΩ
1 R8 resistenza 47 kΩ
1 R20 resistenza 1 kΩ
1 U20 accelerometro STMicroelectronics LIS3LV02DQ 1 U18 Ricevitore GPS RFSolutions GPS41MLR
1 U27 microcontrollore AT90CAN32
70
![Tabella 3.2 - Confronto tra sensori magnetici ad effetto Hall [2]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7270232.83235/6.892.170.747.304.486/tabella-confronto-sensori-magnetici-effetto-hall.webp)
![Figura 3.1 – Tensione di uscita in funzione del campo magnetico totale [S13]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7270232.83235/7.892.213.737.152.441/figura-tensione-uscita-funzione-campo-magnetico-totale-s.webp)
![Figura 3.2 – Componenti del campo magnetico terrestre [S14]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7270232.83235/9.892.200.716.541.1062/figura-componenti-campo-magnetico-terrestre-s.webp)
![Tabella 3.4 a - Confronto tra ricevitori GPS [S16,S17,S18]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7270232.83235/13.892.170.747.144.889/tabella-confronto-ricevitori-gps-s-s-s.webp)
![Tabella 3.4 b - Confronto tra ricevitori GPS [S18,S19,S20]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7270232.83235/14.892.167.749.174.908/tabella-confronto-tra-ricevitori-gps-s-s-s.webp)
![Figura 3.5 - Accuratezza nei GPS e WAAS accuracy [S20]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7270232.83235/16.892.270.681.662.884/figura-accuratezza-gps-waas-accuracy-s.webp)
![Figura 3.6 – RFSolutions GPS-41MLR [S18]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7270232.83235/17.892.263.654.731.1028/figura-rfsolutions-gps-mlr-s.webp)
![Tabella 3.5 – Elementi tipici delle frasi NMEA [S21]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7270232.83235/20.892.167.756.390.745/tabella-elementi-tipici-frasi-nmea-s.webp)
