Design dei prototipi
2.1
Disegni in ambiente CAD
2.1.1
PRO/E
Tutti i prototipi effettivamente realizzati sono stati disegnati in ogni loro com-ponente tramite l’utilizzo di Pro/Engineer Wildfire 2.0, modellatore CAD tridimensionale parametrico creato dalla PTC(Parametric Technology Cor-poration). Tale modellatore utilizza un approccio basato su feature ed un sistema orientato alla meccanica.
2.1.2
Specifiche generali
L’idea che è stata posta alla base della progettazione di un nuovo prototipo di parte distale di dito umano artificiale è stata quella di creare un siste-ma strutturato compliante che fosse bio-ispirato sia nella geometria che nel comportamento meccanico e che superasse, in qualche modo, i limiti presenti nei prototipi già esistenti. Un aspetto comune alla maggior parte dei pro-totipi già esistenti è il tentativo di riprodurre il comportamento meccanico al contatto delle componenti molli del dito umano implementando sistemi a più strati([4],[7],[8],[9]) dove ad ogni singolo strato corrispondesse uno strato reale con caratteristiche meccaniche simili; naturlamente una tale intuizione, che può risultare di per se banale, non lo è affatto in quanto implica per prima cosa una scelta delle componenti da voler implementare e in secondo luogo una scelta dei materiali da utilizzare. Risulta, invece, del tutto assen-te in letassen-teratura il assen-tentativo di implementare la componenassen-te rigida esassen-terna denominata unghia, se non nel prototipo di Murakami et al. del 2003 ([5]) dove però non viene per nulla considerata la composizione multistrato del dito umano e l’unghia assurge più ad una funzione di sensore che di
ponente meccanico. Infine, ma non ultimo per importanza, in nessuno dei prototipi esistenti si pone una particolare attenzione all’aspetto estetico dei prototipi stessi, fondamentale in ambito protesico nel tentativo di rendere sempre meno evidente la menomazione dei soggetti che fanno uso di protesi, permettendogli di interagire con gli altri soggetti in maniera più disinvolta.
Per poter realizzare un tale obiettivo, così complesso, abbiamo pensato che fosse fondamentale per prima cosa, secondo quanto già detto, individua-re quali fossero i costituenti delle dita umane che maggiormente andassero ad incidere sul comportamento meccanico nella fase di contatto delle dita stesse, basandosi anche su quanto osservato in altri studi precedenti senza però trascurare l’unghia, cercando, allo stesso tempo, di mantenere l’aspetto esteriore dei prototipi il più vicino possibile a quello umano.
Osservando l’anatomia del dito umano risulta evidente quanto questa sia complessa, perché composta da molteplici componenti aventi differenti funzioni e caratteristiche meccaniche. Ma tra questi solo alcuni incidono in maniera determinante sul comportamento meccanico a contatto:
• falange media e distale: trattandosi di tessuto osseo sicuramente rap-presentano il costituente più rigido delle dita umane ed anche, quindi, quello dove si andranno a scaricare la quasi totalità degli sforzi svilup-patisi in un contatto. A livello volumetrico, le falangi, rappresentano la quasi totalità del dito umano.
• pelle (epidermide e derma): è il costituente più esterno, quello che per primo interviene nel contatto. è tale costituente a far si che traumi e colpi anche di una certa entità, se causati da oggetti smussati, possano non causare alcun danno. La pelle ha infatti una grande resistenza alla trazione, grazie alla disposizione delle fibre di collagene presenti nel der-ma e al forte legame fra le cellule più superficiali dell’epidermide, der-ma è anche deformabile grazie alla presenza di fibre di elastina, permettendo in seguito al contatto il successivo ripristino della forma normale • tessuto grasso sottocutaneo: rappresenta il principale costituente del
polpastrello e quindi della zona del dito che principalmente determina la modalità di contatto durante la manipolazione. é proprio tale tessuto a conferire la capacità compliante peculiare delle dita umane, infatti i lipidi costituiscono un cuscinetto protettivo che assorbe la maggior parte della deformazione che interviene nel contatto.
• unghia: si compone principalmente di cheratina e presenta un’elevata rigidezza rispetto a quella dei tessuti molli analoga a quella delle ossa. Ha come scopo quello di facilitare la prensione, contribuire alla stabilità
Tabella 2.1: dimensioni dito indice umano presenti in letteratura (NOTA: f. indica il
termine falange) [2],[8],[10]
Lunghezza dito Lunghezza Altezza dito Larghezza dito Spessore (f. media e distale) (f. distale) (f. distale) (f. distale) (epidermide&derma) 40mm±5 18mm±2.25 14mm±1 18.3mm±1 1mm±0.2
strutturale delle dita, dare supporto e limitare l’usura delle estremità delle dita a contatto con gli oggetti.
Il primo problema che abbiamo incontrato nel fare quanto appena detto con-siste nella scelta del modello biologico di riferimento. Econ-siste, infatti, un’e-vidente variabilità nelle dimensioni caratteristiche delle dita dell’uomo, sia, naturalmente, tra le cinque dita stesse e sia a seconda di parametri come ad esempio l’età,il sesso,il peso, l’altezza del soggetto umano preso come riferi-mento, per questo abbiamo deciso di assumere come dimensioni di riferimento quelle del dito indice di un essere umano adulto sano di sesso maschile(vedi tabella 2.1), di peso medio ed altezza media, tale scelta è motivata dal fat-to che un tale soggetfat-to rappresenta il riferimenfat-to maggiormente presente in letteratura [2],[8],[10]. Una volta scelto il dito da riprodurre artificialmente abbiamo deciso di focalizzare l’attenzione sulle ultime due falangi (la media e la distale)in quanto rappresentano la parte delle dita maggiormente coinvolta nel contatto con gli oggetti nella manipolazione. nella scelta delle dimensio-ni di ciascuna delle componenti dei prototipi, naturalmente, ci siamo basati sulle dimensioni geometriche dei loro analoghi biologici, dimensioni presenti all’interno di studi precedenti in cui vengono presentate misure fatte in vi-vo ed ex-vivi-vo e modelli virtuali della punta del dito umano [2],[10],[8],[11]. Abbiamo realizzato tre differenti prototipi con una graduale evoluzione non trascurabile verso una geometria sempre più bio-ispirata, facendo, però, ri-manere inalterato il numero e le caratteristiche principali delle parti, che sono le seguenti:
• una struttura interna rigida capace di riprodurre la geometria e di mimare il comportamento della falange media e distale
• uno strato interno in materiale polimerico a bassa rigidezza capace di riprodurre la geometria e di mimare il comportamento del tessuto grasso sottocutaneo
• uno strato esterno in materiale polimerico più rigido rispetto allo strato interno, capace riprodurre la geometria e di mimare il comportamento dell’epidermide
• una struttura esterna rigida capace di riprodurre la geometria e di mimare il comportamento dell’unghia
2.1.3
Primo prototipo
Il primo prototipo (vedi figura 2.2) rappresenta, come accade sempre in am-bito di progettazione di nuovi dispositivi, il primo passaggio dall’idea proget-tuale a qualcosa di realizzabile e per questo motivo rappresenta una sempli-ficazione, a volte estrema dell’idea. In questo viene riprodotto il dito umano considerando solo le ultime due falangi, cosa che viene fatta per tutti i proto-tipi, cercando di rispettare nella maniera più semplice possibile le specifiche geometriche generali date dall’idea progettuale con le seguenti parti:
struttura interna rigida : Un supporto con superficie di base ellissoidale (raggio maggiore di 13mm e raggio minore di 9mm) da cui si sviluppa una struttura cilindrica, avente centro della superficie di base posizio-nato sul diametro minore dell’ellisse della struttura di supporto a 2mm dal suo centro. Tale struttura cilindrica ha un’altezza pari alla somma della lunghezza della falange media e di quella distale (raggio di base 3mm e altezza 39.3mm)(vedi figura 2.2).
strato interno :La geometria principale da cui viene poi ricavata la configu-razione finale è una struttura a base ellissoidale che ha come dimensioni quelle di riferimento di un dito indice privato dell’epidermide (super-ficie di base con raggio maggiore 9mm e raggio minore 6mm, altezza del cilindro pari a 42.7mm). Nella parte terminale della struttura el-lissoidale è presente una curvatura con raggio pari a 10mm sul piano sagittale e 20mm sul piano frontale. Naturalmente, viene poi effettua-to un cut-out per effettua-togliere la parte di volume occupata dalla struttura rigida interna e dall’unghia.
strato esterno : La geometria risulta essere identica a quella dello stra-to interno, eccetstra-to che in quesstra-to caso si tratta di una cover di spes-sore costante pari ad 1mm che va a riprodurre proprio lo spesspes-sore dell’epidermide secondo le dimensioni di riferimento.
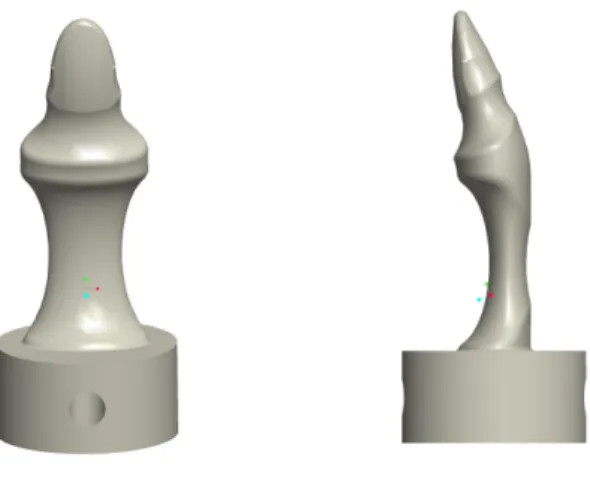
unghia (vedi figura 2.1): La geometria generale è data dallo sviluppo nello spazio di una certa superficie, in direzione normale alla superficie stessa. la superficie in questione è un segmento di arco (con spessore costante pari ad 1mm e larghezza pari a 14mm, il raggio di curvatura è 20mm, lo sviluppo in altezza è 21mm); le due superfici perpendicolari alla superficie di sviluppo iniziale sono state arrotondate; nella parte finale
Figura 2.1: (sx)vista del piano sagittale dell’unghia del primo prototipo (dx)vista del
piano frontale dell’unghia del primo prototipo
della geometria risultante dallo sviluppo in altezza della superficie viene applicata una curvatura (raggio pari a 7.5mm); sulla struttura sono presenti tre fori per la successiva migliore adesione ai materiali siliconici che andranno a comporre lo strato interno e lo strato esterno.
2.1.4
Secondo prototipo
Nel secondo prototipo (vedi figura 2.3) vengono introdotti alcuni aspetti geometrici più complessi che riguardano in particolare:
• la geometria della struttura rigida interna che riproduce la reale geo-metria dell’osso reale
• l’angolazione della falange distale rispetto a quella media, che viene posto pari a 20° se si considera l’angolo tra i due assi principali delle due falangi
• il polpastrello viene considerato come una superficie piana avente una certa inclinazione rispetto all’asse dell’ultima falange
• vengono introdotte alcune scanalature all’altezza del giunto interfalan-geo sullo strato esterno a scopo unicamente estetico
Come già preannunciato le componenti rimangano inalterate in numero e in funzione principale. Segue, quindi, un elenco delle parti dove si evidenziano le differenze rispetto al primo prototipo:
Figura 2.2: (sx)vista del piano sagittale del primo prototipo (centro) vista del piano
frontale del primo prototipo(dx) vista della struttura interna rigida del primo prototipo (NOTA: lo strato interno è posto trasparente e quello esterno semitrasparente per maggiore chiarezza grafica)
Figura 2.3: (sx) vista del piano frontale del secondo prototipo (dx)vista del piano sagittale
del secondo prototipo (NOTA: lo strato interno è posto trasparente per maggiore chiarezza grafica)
struttura interna rigida : In questo secondo prototipo non è più, come era nel primo, solo la lunghezza delle falangi ad essere considerata co-me paraco-metro di costruzione della geoco-metria, bensì è la reale geoco-metria delle ultime due falangi che viene considerata e viene riprodotta (vedi 2.4). Risulta chiaro che in tal caso una descrizione delle numerose rifi-niture applicate per la realizzazione delle geometria finale molto com-plessa risulta superflua; risulta invece più proficuo a livello descrittivo un confronto grafico tra la geometria reale delle ultime due falangi e quella della struttura da noi disegnata, a tal proposito vedere la figura 2.5. Altra differenza rilevante rispetto al primo prototipo è l’introdu-zione di un’inclinal’introdu-zione dell’ultima falange di 20° rispetto alla prima, se si considera l’angolo tra i due assi principali delle due falangi, fattore introdotto allo scopo di facilitare la successiva manipolazione di ogget-ti da parte del protoogget-tipo eventualmente inserito su un disposiogget-tivo di manipolazione rappresentando la configurazione maggiormente assun-ta dalle ultime due falangi. Alla base della struttura è sassun-taassun-ta posassun-ta una struttura cilindrica di supporto con superficie di base avente diametro pari a 20mm a e alta 10mm con un foro centrale di diametro pari a 4mm parallelo alla superficie di base, posto in prospettiva di utilizzarlo come riferimento spaziale in fase di creazione effettiva dei prototipi. strato interno : Lo strato interno dovendo ricoprire la struttura rigida
interna è costretto a seguirne la traiettoria. La struttura a base ellis-soidale, adibita alla copertura della falange distale, ha l’asse principale inclinato di 20° rispetto all’asse della parte adibita alla copertura del-la fadel-lange media. Il polpastrello è identificato da una superficie pia-na avente un’inclipia-nazione rispetto all’asse dell’ultima falange( il pol-pastrello è stato inizialmente modellato in tal modo per semplificare la realizzazione del prototipo e per creare un’area di contatto iniziale per facilitare la manipolazione successiva da parte del prototipo even-tualmente montato su un dispositivo di manipolazione). Inoltre sono presenti delle scanalature sul lato superiore e inferiore e su i due la-ti esterni all’altezza del giunto interfalangeo che cercano di riprodurre scanalature realmente presenti nel dito umano di riferimento a scopo puramente estetico.
strato esterno : La geometria risulta essere identica a quella dello strato interno, eccetto che in questo caso si tratta di una cover di spessore costante pari ad 1mm, come nel primo prototipo, che va a riprodurre proprio lo spessore dell’epidermide secondo le dimensioni di riferimen-to; importante notare che nella parte terminale dell’ultima falange lo
Figura 2.4: strurra rigida interna secondo prototipo (sx) vista forntale, (dx) vista sagittale
Figura 2.5: confornto tra (sx)vista dell’ osso reale (ultime due falangi) e (dx)vista della
Figura 2.6: strurra rigida interna seconda versione del secondo prototipo (sx) vista
frontale, (dx) vista sagittale
spessore costante di 1mm viene meno e ciò è necessario a mantenere in questa zona la stessa curvatura sia per lo strato interno che per quello esterno, cosa che accade anche nel dito umano.
struttura esterna rigida : La geometria è la medesima del primo prototi-po eccetto che i 3 ampi fori presenti nel primo prototiprototi-po sono sostituiti da una serie più fitta di fori circolari aventi lo scopo di migliorare ulte-riormente la successiva adesione dei materiali siliconici di strato interno e strato esterno.
Del secondo prototipo è stata realizzata poi una seconda versione in cui la geometria della struttura rigida interna è stata modificata all’altezza della falange distale; in particolare è stato imposto un affusolamento allo scopo di migliorare le prestazioni meccaniche del prototipo avendo come target il comportamento del dito umano, aspetto che verrà discusso e meglio giustifi-cato nel capitolo relativo alle prove meccaniche a cui sono stati sottoposti i prototipi (vedi figura 2.6).
2.1.5
Terzo prototipo
Nel terzo prototipo si conserva pressoché inalterata la geometria delle varie componenti propria del secondo prototipo avente come struttura rigida in-terna la seconda versione (vedi figura 2.7). In questo caso, però, la base di
Figura 2.7: strurra rigida interna del terzo prototipo (sx) vista frontale, (dx) vista
sagittale
supporto, utile in fase di realizzazione del prototipo, diviene un pezzo asse-stante su cui posizionare il prototipo in un secondo momento (cilindro con superficie di base di diametro pari a 20mm a e alto 10mm, con cilindro più piccolo centrale sulla parte superiore, diametro 3.2mm e altezza 3.5mm, per il successivo interfacciamento col il prototipo), infatti, al suo posto alla base della struttura rigida interna troviamo una base meno spessa, questa volta di 1mm, avente un foro circolare centrale di diametro pari a 3.2mm e pro-fondo 3.5mm. Una tale interfaccia è funzionale all’eventuale connessione del prototipo alla basetta di supporto ma sopratutto ad un dispositivo di ma-nipolazione, ad es. una mano robotica. L’innovazione principale rispetto al prototipo precedente viene introdotta nella geometria dello strato interno e dello strato esterno all’altezza del polpastrello. In particolare l’appiattimento dei primi prototipi viene sostituito da una geometria bio-ispirata, ovvero ar-rotondata (vedi figura 2.8 e figura 2.9). Inoltre la parte relativa alla falange media non corrisponde più ad un cilindro a base ellissoidale, bensì ad un cono tagliato con base maggiore circolare di diametro pari a 8mm e base minore corrispondente all’ellisse di base della struttura che costituisce la zona della falange distale
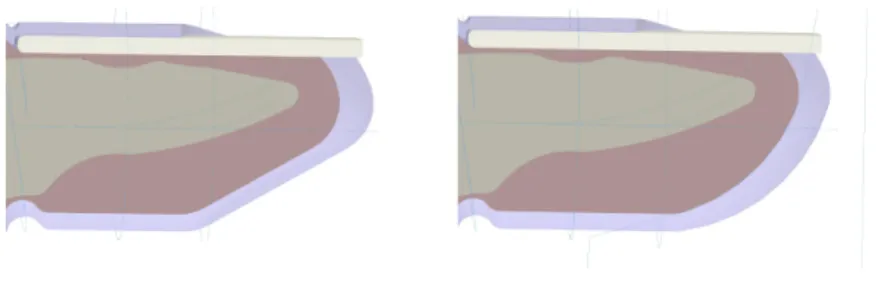
Figura 2.8: (sx)vista della sezione sagittale della punta del secondo prototipo-2Aversione
(dx)vista della sezione sagittale della punta del terzo prototipo
Figura 2.9: (sx)vista della punta del dito indice umano (dx) vista della punta del terzo
Figura 2.10: disegno delle 3 fondamentali azioni svolte dai tessuti molli del polpastrello
2.2
Scelta dei materiali
2.2.1
Materiali soffici per dita robotiche
Considerando l’anatomia del dito umano, in particolare la sua struttura a più strati con differenti proprietà meccaniche, risulta evidente la necessità, per la realizzazione di un polpastrello artificiale, di individuare dei materiali soffici che riescano a riprodurre il comportamento di quelle componenti che si frap-pongono tra l’epidermide e la falange distale. Infatti, è proprio la presenza di tali componenti con bassa rigidezza e viscosità caratteristica che permette all’uomo di effettuare in maniera efficace qualsivoglia presa[12] attraverso le tre seguenti azioni (vedi figura 2.10):
• dissipazione dell’energia di impatto che evita un eccessivo caricamento della falange distale
• dissipazione dell’energia di deformazione che viene indotta durante la manipolazione di un oggetto
La ricerca di materiali non di origine biologica che siano in grado di ripro-durre il comportamento dei tessuti molli del corpo umano è aspetto fondante della chirurgia plastica e di ricostruzione. Materiali siliconici biocompatibi-li sono materiabiocompatibi-li ormai largamente usati nella sostituzione di tessuto molle per il mento e per le palpebre, mentre contenitori elastici riempiti con gel siliconici o con soluzioni saline sono ampiamente utilizzati per l’incremento di tessuto molli in varie parti del corpo. In generale, però, possiamo dire che esistono vari materiali artificiali che possono essere dei buoni candidati per la riproduzione del comportamento dei tessuti molli. Essi possono essere classificati in tre grandi classi:
• Solidi: sono non-viscoelastici e incompressibili (ad es. PVC(poli-vinil-cloruro))
• Elastomeri: sono viscoelastici e incompressibili (ad es. gomme silico-niche, spugne)
• Materiali reologici: (incapsulati da contenitori elastici) sono viscoelasti-ci ma compressibili (ad es. polveri sottili di amido di mais commestibile, pasta di amido di mais in fluido siliconico, gel cosmetici commerciali) Di particolare interesse tra questi, risultano essere le gomme siliconiche in quanto permettono di variare in un ampio range di rigidezza e di viscosità, inoltre hanno la peculiarità di essere molto resistenti alle alte temperature, agli attacchi chimici, all’ossidazione e sono ottimi isolanti elettrici. Le gom-me siliconiche appartengono alla più ampia classe dei siliconi, i quali sono polimeri inorganici basati su una catena silicio-ossigeno e gruppi funzionali organici(R) legati agli atomi di silicio. Le gomme siliconiche, in particolare, sono masse polimeriche formulate che con l’aggiunta di un opportuno ca-talizzatore o agente di vulcanizzazione e possono essere vulcanizzate sia ad alta temperatura che a temperatura ambiente per ottenere oggetti di for-ma definita, con tutte le caratteristiche di una gomfor-ma. Esse sono chiafor-mate HTV (High Temperature Vulcanizing) se vulcanizzano ad alta temperatu-ra, ed RTV (Room Temperature Vulcanizing) se vulcanizzano a temperatura ambiente. Sono invece chiamate LSR (Liquid Silicone Rubber) le gomme sili-coniche cosiddette liquide che sono particolarmente adatte, per la loro bassa viscosità, ad essere iniettate in uno stampo e sono in genere costituite da due componenti da miscelare al momento della trasformazione. Il tempo di vulcanizzazione di questi prodotti varia in funzione del tipo di catalizzatore o di agente di vulcanizzazione e della temperatura di processo.
2.2.2
Materiali per le componenti non rigide
La scelta dei materiali da utilizzare per i vari componenti dei vari prototi-pi ha rappresentato una fase fondamentale del lavoro di tesi, in quanto è proprio da questi che dipende il comportamento meccanico dei prototipi e quindi la possibilità di riprodurre effettivamente il comportamento proprio del dito umano. Sulla base di quanto discusso nel paragrafo precedente, la nostra attenzione si è focalizzata, per quanto riguarda i materiali per lo stra-to interno e lo lo strastra-to esterno dei prostra-totipi , su alcune gomme siliconiche RTV commerciali della Smooth-On®. In particolare per lo strato interno
sono stati selezionati due materiali con caratteristiche leggermente differenti, è evidente quindi che per ciascun prototipo sono state realizzate due versioni, una per ognuno dei due materiali:
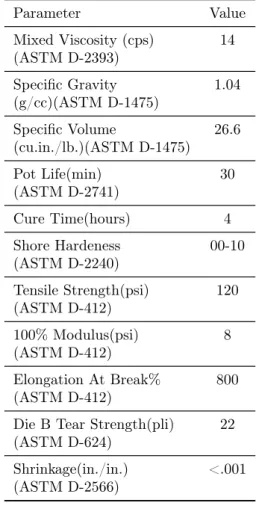
EcoFlex-0010 : gomma siliconica platino-catalizzata, che vulcanizza a tem-peratura ambiente ottenendo un materiale traslucido in seguito al me-scolamento in rapporto 1:1 in peso o in volume di due componenti denominate A e B. Il valore 0010 indica la durezza su scala Shore A-00. (vedi tabella 2.3)
EcoFlex-0030 : gomma siliconica platino-catalizzata, che vulcanizza a tem-peratura ambiente ottenendo un materiale traslucido in seguito al me-scolamento in rapporto 1:1 in peso o in volume di due componenti denominate A e B. Il valore 0030 indica la durezza su scala Shore A-00. (vedi tabella 2.4)
mentre per lo strato esterno:
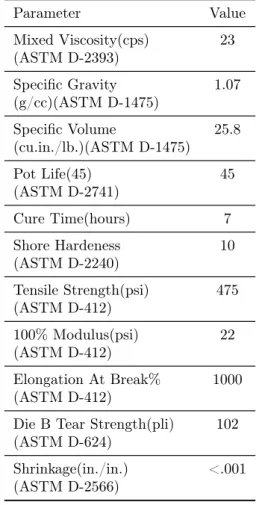
DragonSkin-10 : gomma siliconica platino-catalizzata, che vulcanizza a temperatura ambiente ottenendo un materiale traslucido in seguito al mescolamento in rapporto 1:1 in peso o in volume di due componenti denominate A e B. Il valore 10 indica la durezza su scala Shore A. (vedi tabella 2.5)
2.2.3
Materiali per le componenti rigide
Tutte le componenti rigide sono state realizzate in rapid prototyping trami-te l’utilizzo della stampantrami-te 3D ProJet™ HD3000 (vedi figura 2.11) a cui sono stati messi in ingresso dei file con estensione .stl. Il materiale stam-pato è commercialmente definitoVisiJet® EX200, una resina acrilica avente
rigidezza molto elevata rispetto ai materiali siliconici delle componenti non rigide, tale da essere effettivamente considerato rigido (vedi tabella 2.2 delle caratteristiche del materiale).
Tabella 2.2: caratteristiche tecniche del fotopolimero acrilico fornite dal produttore
Parameter Value Modulo di trazione (MPa) 1267 (ASTM D-638)
Resistenza alla trazione (MPa) 31 (ASTM D-638)
Trazione al punto di rottura (%) 20 (ASTM D-638)
Resistenza alla flessione (MPa) 39 Densità a 80°C(liquido)(g/cm3) 1.02
(ASTM D-4164)
Tabella 2.3: caratteristiche EcoFlex-0010 fornita dal produttore Parameter Value Mixed Viscosity (cps) 14 (ASTM D-2393) Specific Gravity 1.04 (g/cc)(ASTM D-1475) Specific Volume 26.6 (cu.in./lb.)(ASTM D-1475) Pot Life(min) 30 (ASTM D-2741) Cure Time(hours) 4 Shore Hardeness 00-10 (ASTM D-2240) Tensile Strength(psi) 120 (ASTM D-412) 100% Modulus(psi) 8 (ASTM D-412) Elongation At Break% 800 (ASTM D-412)
Die B Tear Strength(pli) 22 (ASTM D-624)
Shrinkage(in./in.) <.001 (ASTM D-2566)
Tabella 2.4: caratteristiche EcoFlex-0030 fornita dal produttore Parameter Value Mixed Viscosity(cps) 3 (ASTM D-2393) Specific Gravity 1.07 (g/cc)(ASTM D-1475) Specific Volume 26.0 (cu.in./lb.)(ASTM D-1475) Pot Life(min) 45 (ASTM D-2741) Cure Time(hours) 4 Shore Hardeness 00-30 (ASTM D-2240) Tensile Strength(psi) 200 (ASTM D-412) 100% Modulus(psi) 10 (ASTM D-412) Elongation At Break% 900 (ASTM D-412)
Die B Tear Strength(pli) 38 (ASTM D-624)
Shrinkage(in./in.) <.001 (ASTM D-2566)
Tabella 2.5: caratteristiche DragonSkin-10 fornita dal produttore Parameter Value Mixed Viscosity(cps) 23 (ASTM D-2393) Specific Gravity 1.07 (g/cc)(ASTM D-1475) Specific Volume 25.8 (cu.in./lb.)(ASTM D-1475) Pot Life(45) 45 (ASTM D-2741) Cure Time(hours) 7 Shore Hardeness 10 (ASTM D-2240) Tensile Strength(psi) 475 (ASTM D-412) 100% Modulus(psi) 22 (ASTM D-412) Elongation At Break% 1000 (ASTM D-412)
Die B Tear Strength(pli) 102 (ASTM D-624)
Shrinkage(in./in.) <.001 (ASTM D-2566)
![Tabella 2.1: dimensioni dito indice umano presenti in letteratura (NOTA: f. indica il termine falange) [2],[8],[10]](https://thumb-eu.123doks.com/thumbv2/123dokorg/7570655.111530/3.892.205.742.251.333/tabella-dimensioni-indice-presenti-letteratura-indica-termine-falange.webp)




![[segue]](data:image/gif;base64,R0lGODlhAQABAIAAAP///wAAACH5BAEAAAAALAAAAAABAAEAAAICRAEAOw==)