Capilolo 3
Specifiche per motoveicoli
3.1 Introduzione
La dinamica di un motoveicolo dipende da diversi fattori. In questo capitolo verranno descritte brevemente alcune delle interazioni tra i diversi parametri caratteristici delle sospensioni e verrà dato un cenno ai movimenti tipici del motoveicolo. Saranno inoltre riportati alcuni valori tipici relativamente alla rigidità della molla e al coefficiente di smorzamento, provando a spiegare come la loro variazione influenzi la dinamica del veicolo. Da queste considerazioni dipendono i valori scelti per il coefficiente di smorzamento nelle diverse condizioni stradali.
La parte finale è infine dedicata alle specifiche di progetto, con attenzione ai segnali d’ingresso del sistema per le diverse tipologie di strada.
3.2 Movimenti tipici nella dinamica di un motoveicolo
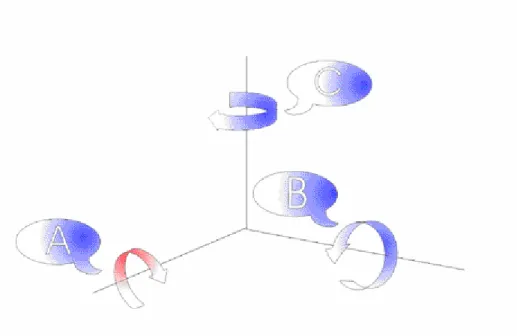
Quando un corpo è in rotazione attorno ad un asse e gliene viene impressa un’altra attorno ad un asse perpendicolare al primo, si genera
un momento chiamato effetto giroscopico nella direzione perpendicolare ai due assi come mostrato in figura 3.1.
Figura 3.1:esempio di effetto giroscopico
È quindi chiaro che un motoveicolo è sottoposto a diversi effetti giroscopici, come:
• sterzata: generata dalla ruota anteriore quando si sterza; • rollio: generato dalla moto quando si va in piega;
• imbardata: generata dalle ruote in rotazione attorno al loro asse e all’asse della curva;
• effetto giroscopico generato dal motore.
Tralasciando il primo e l’ultimo effetto, il rollio e l’imbardata dipendono dalla taratura delle sospensioni.
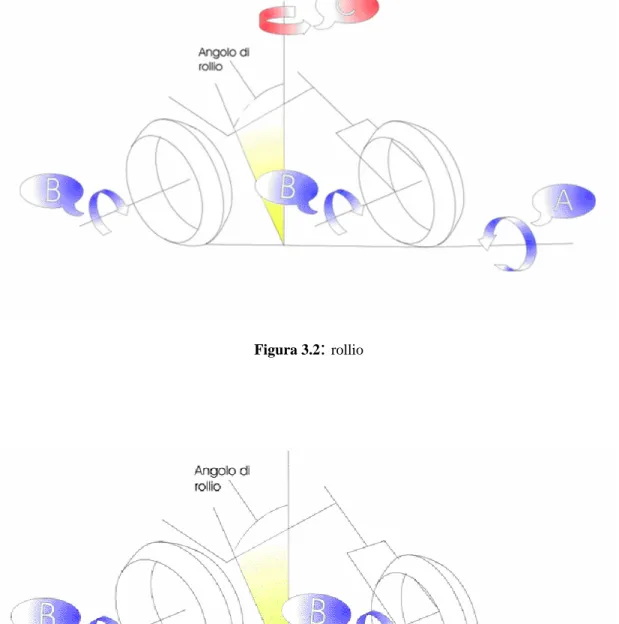
Figura 3.2: rollio
Il rollio e l’imbardata sono effetti stabilizzanti, nel senso che i momenti generati tendono infatti a mantenere dritta la moto.
L’influenza che le sospensioni hanno su questi due effetti dipende sia dalle caratteristiche statiche che da quelle dinamiche delle stesse, in particolare è utile avere un accordo tra rigidità e smorzamento della sospensione.
In generale un eccessivo smorzamento rende la moto meno agile nei cambi di traiettoria e tende a scomporla in frenata.
3.3 Caratteristiche statiche e dinamiche delle sospensioni
Come già detto, le sospensioni possono essere rappresentate da una molla con in parallelo un elemento smorzante.
Entrambi gli elementi hanno una funzione importante nella determinazione dell’assetto del motoveicolo.
La molla non viene mai sollecitata a trazione, essa viene sempre montata in modo tale da essere sempre leggermente compressa.
Questa compressione iniziale è detta precarico.
Aumentando il precarico della molla non se ne influenza la rigidità, perché essa dipende solo dal materiale, dallo spessore del filo utilizzato e dal diametro delle spire. Tuttavia una variazione del precarico influenza la soglia oltre la quale la molla inizia a comprimersi.
curva. Al contrario un aumento del precarico rende la moto più agile con una perdita di stabilità alle alte velocità.
L’elemento smorzante è quello che regola la velocità con cui la sospensione torna alla posizione di equilibrio.
Sui motoveicoli è possibile regolare sia il freno in compressione che il
freno in estensione.
È importante accordare la molla con il relativo ammortizzatore, evitando ad esempio di precaricare troppo poco la molla e di impostare un freno idraulico troppo elevato, con la conseguenza di ottenere una sospensione che affonda troppo e impiega un tempo eccessivo per riportarsi alla posizione di equilibrio.
3.4 Valori tipici per motoveicoli
Come descritto al paragrafo precedente la regolazione dinamica della sospensione richiede la ricerca di un compromesso.
Impostare smorzamenti arbitrariamente bassi potrebbe creare situazioni in cui invece di produrre benefici in termini di comfort si generano scompensi tali da rendere il motoveicolo inguidabile.
Vista la mancata disponibilità di caratteristiche relative all’attuatore capace di produrre uno smorzamento variabile, si è cercato di effettuare una ricerca per ottenere dei valori verosimili di smorzamento. Per evitare di alterare eccessivamente l’assetto attuale si è poi scelto di limitare la
variazione di smorzamento tra -20% a +10% rispetto alle caratteristiche dell’ammortizzatore montato attualmente.
In tabella 3.1 vengono riportati valori indicativi di coefficiente di smorzamento e di rigidità della molla posteriore.
Per scooter di fascia inferiore è ipotizzabile che questi valori siano ancora inferiori. Rigidità Smorzamento in compressione Smorzamento in distensione min 3 N/mm 100 Ns/m 600Ns/m max 9 N/mm 300Ns/m 900Ns/m
Tabella 3.1: parametri tipici per scooter di fascia medio-alta
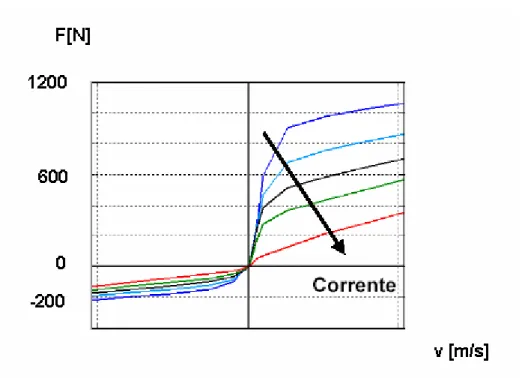
Prendendo questi valori di riferimento e considerando la caratteristica 1.5 relativa ad un ammortizzatore a smorzamento variabile per autoveicoli, una caratteristica possibile per l’attuatore da montare su un motoveicolo potrebbe essere del tipo mostrato in figura 3.4.
Figura 3.4:caratteristica forza-velocità per un ammortizzatore a smorzamento variabile per un
motoveicolo
3.5 Specifiche sui segnali di ingresso
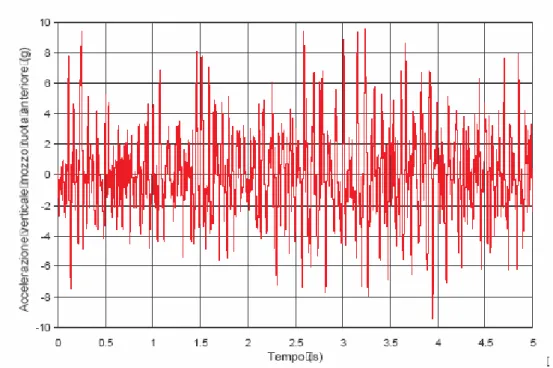
Il sistema deve riuscire a discriminare quattro tipologie di strada differenti. Una possibile caratterizzazione del fondo stradale può essere effettuata tramite l’accelerazione che la stessa imprime al mozzo della ruota anteriore.
Figura 3.5: esempio di segnale di accelerazione prelevato su un mozzo ruota
Al variare della tipologia di strada varia l’ampiezza delle fluttuazioni. In tabella 3.2 vengono riportati i ranges di accelerazione considerati come ingressi nei diversi casi.
Tipologia strada Accelerazione [g]
liscio 0-2,5
pavé leggero 2,6-7,5
pavé pesante 7,6-10,5
ciottolato 10,6-17
I diversi intervalli sono stati ottenuti osservando i risultati sperimentali presentati al congresso nazionale sulle sollecitazioni relative al Gilera Runner, e altri dati reperiti in letteratura su tipi di scooter diversi riguardanti studi sulle sollecitazioni.
I valori riportati sono indicativi ed è facile immaginare che la separazione non sia così netta. Esistono dei valori che potrebbero essere considerati per due tipologie contigue.
3.6 Schema a blocchi del sistema
Il progetto del sistema di sospensione adattiva prevede l’utilizzo di un attuatore meccanico la cui caratteristica è del tipo mostrato in figura 3.4, ed è nel complesso realizzato secondo lo schema a blocchi riportato in figura 3.6.
Oltre all’attuatore meccanico, è possibile distinguere un blocco per l’acquisizione dell’informazione proveniente dalla strada costituito da un accelerometro e da una rete per il condizionamento del segnale, e uno relativo al controllo dell’attuatore stesso. I vari blocchi saranno discussi nei capitoli seguenti.