Capitolo 1
Sulla biomimetica
1.1 Introduzione
La bioingegneria è per sua generale definizione la disciplina che utilizza le metodologie e le tecnologie proprie dell’ingegneria al fine di comprendere, determinare e tentare di risolvere problematiche di interesse medico-biologico.
Nella bioingegneria quindi si fa uso dei metodi di analisi quantitativa, di modellizzazione o caratterizzazione (modelli matematici, sistemi di elaborazione delle informazioni e strumentazione), con gli obiettivi di accrescere le conoscenze sul funzionamento dei sistemi biologici, e di progettare e sviluppare nuove tecnologie e strumenti dedicati all’indagine, alla diagnostica, alla terapia e alla riabilitazione [1].
Di recente, in particolare nel settore della robotica, sta prendendo sempre più piede l’idea di prendere ispirazione dalla natura e dai sistemi biologici per risolvere problemi di carattere fisico e tecnologico [2] [3] [4] [5] [6]. L’incredibile varietà di specie animali, inserite in contesti ambientali diversi e con differenti storie evolutive, permette infatti di avere una ricchissima fonte di suggerimenti e di idee per la risoluzione di problemi e la progettazione di nuovi artefatti funzionali.
D’altro canto la robotica può essere uno mezzo importante sia per l’osservazione che per la comprensione dei meccanismi fisici e neurali che permettono la coordinazione senso-motoria e determinano il comportamento (neurorobotica) delle differenti specie biologiche, in particolare con la progettazione e realizzazione di piattaforme fisiche utili per la validazione di ipotesi e teorie [7] [8] [9].
Esiste un passo precedente alla costruzione fisica di un artefatto robotico, che comprende lo studio e la progettazione di come poi avverrà l’implementazione fisica del
sistema. La pianificazione finalizzata alla progettazione necessita di fondamenti logici e numerici su cui basarsi per una strutturazione coerente del lavoro (specifiche tecniche).
In altre parole, il primo passo per la realizzazione di un prodotto tecnologico che risulti funzionale deve essere fatto con l’obiettivo di determinare i requisiti fisici e dinamici richiesti per il sistema, che saranno fissati sulla base dello scopo per cui tale prodotto deve essere realizzato, e sull’ambiente in cui sarà utilizzato e con cui dovrà interagire.
In tal senso, se si vuole utilizzare come fonte di ispirazione un sistema biologico risulterà necessaria una sua caratterizzazione ed una conoscenza di quegli aspetti di interesse ai fini della progettazione.
Quindi, da un lato le conoscenze biologiche possono essere il punto di partenza per la soluzione di problemi di carattere tecnologico, dall’altro lato le tecniche di indagine di tipo quantitativo, diretto ed oggettivo, caratteristiche dell’ingegneria, possono fornire nuovi dati utili alla conoscenza della specie biologica (animale o vegetale), e utili per fissare quei requisiti tecnici necessari da raggiungere per la realizzazione di sistemi funzionanti.
L’utilizzo di modelli analitici per la verifica delle misure acquisite è il passo successivo, dal quale poi potrà partire la costruzione di piattaforme fisiche che possano essere utilizzate come modelli per la validazione delle ipotesi e quindi come prototipi.
Molte sono le domande che i biologi si pongono da tempo e a cui non sanno dare risposta, o per cui sono state sviluppate diverse teorie ed ipotesi non dimostrabili, e per questo può risultare di aiuto l’intervento con un approccio di tipo ingegneristico, basato sulla realizzazione di modelli analitici e fisici [10] [11] [12].
In questa visione, la biomimetica e la bioispirazione stanno crescendo grazie ad un nuovo tipo di collaborazione tra gruppi di ricerca che iniziano sempre di più ad essere di tipo eterogeneo, composti da ingegneri di diverso indirizzo, biologi, medici, designer, etc.
In particolare, per quello che riguarda il contesto del presente studio, si parla della stretta collaborazione tra ingegneri e biologi che permette, in questo caso come in altri, di avere una crescita parallela di entrambe le discipline, attraverso un’integrazione bidirezionale ed un continuo confronto.
1.2 Bioispirazione e robotica biomimetica
La robotica moderna ormai ha abbracciato a pieno una concezione più ampia di quello che si intende per robot: non più una semplice macchina utensile costruita con lo scopo di
alleviare, facilitare e velocizzare il lavoro umano, ma un sistema meccatronico in grado di generare e controllare forze, capace di resistere ad ambienti ostili o pericolosi per l’uomo, di comportarsi in modo appropriato e di rispondere in maniera opportuna agli input esterni, senza recare alcun danno per l’operatore o per se stesso. Si sta in questo modo progredendo verso quell’immagine di robot descritta da autori di fantascienza e sognata da molti scienziati, ovvero l’idea del robot in grado di fornire servizi utili di svariato genere e, allo stesso tempo, salvaguardare l’uomo e l’ambiente che lo circonda.
In questo contesto, non più ormai solo fantascientifico, si inserisce la robotica bioispirata, che considera di sfruttare come modello il sistema biologico per sviluppare un sistema artificiale, robotico, che possa essere usato in modo efficace sia per compiere azioni sullo stesso sistema biologico (per esempio, un robot per chirurgia o un robot per neuroriabilitazione), oppure per essere una piattaforma di validazione, il più realistica possibile, per testare teorie ed ipotesi riguardanti il sistema biologico.
L’uso del modello fisico, infatti, permette di testare direttamente anche le capacità di interazione ed il comportamento nei diversi ambienti, ed è un metodo ed un concetto che storicamente si può far risalire agli anni ’40, quando con la nascita della cibernetica si è iniziato ad utilizzare le macchine come modelli materiali utili per testare e validare ipotesi scientifiche.
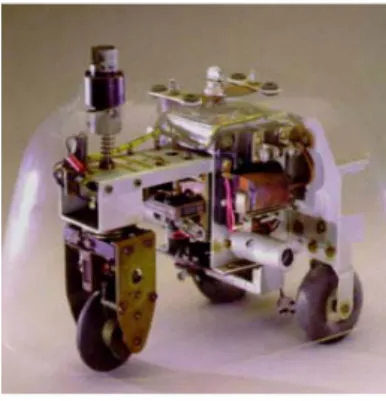
Uno dei primi esempi, a cui si può imputare la nascita della biorobotica contemporanea, è la tartaruga di Grey Walter (1950-1953), di cui si mostra un’immagine in figura 1.1, che è però anche un chiaro esempio di quello che è stato, fino all’ultimo decennio, il collo di bottiglia tecnologico che ha impedito la crescita di questo settore multi-disciplinare.
Se si guarda bene alla storia si può risalire fino a Leonardo da Vinci per vedere come la bioispirazione non sia cosa nuova nella mente umana, ma come anche le conoscenze strutturali, di materiali, elettroniche siano fondamentali per la realizzazione di sistemi efficienti.
L’esplosivo sviluppo tecnologico a cui abbiamo assistito negli ultimi anni ha permesso di aprire tutto un nuovo mondo per la ricerca scientifica e tecnologica.
Se da un lato le nuove metodologie ed i nuovi strumenti hanno dato la possibilità di realizzare indagini sempre più approfondite, e sotto diversi punti di vista, dall’altro lato si è creata una cascata di richieste di tecnologie ancora più innovative. La crescita ed il progresso si stanno sviluppando in maniera esponenziale ed ogni nuova scoperta genera nuova richiesta e necessità di performance sempre maggiori.
Considerato questo, gli scienziati si sono mossi alla ricerca di nuove fonti di ispirazione e apprendimento, che per molti sono state trovate nell’osservazione delle strategie fisiche e comportamentali del mondo animale: che con i suoi oltre 2 milioni di specie è in grado di fornire forse la più vasta risorsa di idee per la progettazione di nuovi sistemi dalle prestazioni superiori in termini di reattività, adattabilità, flessibilità, robustezza e stabilità.
Molte sono infatti le similitudini che è possibile trovare tra animali e robot in termini di movimento, di capacità sensoriali, per il comportamento, per l’utilizzo di sistemi di controllo dedicati all’esecuzione di task in ambienti non strutturati, dinamici e complessi.
Come importante fattore a vantaggio di un approccio ispirato al mondo biologico per la soluzione di problematiche di carattere tecnologico, c’è anche da dire che le specie che possiamo osservare e studiare, con i suoi milioni di anni di evoluzione alle spalle, sono frutto di una capacità di resistenza a condizioni ambientali estreme e fattori improvvisi e imprevedibili di cambiamento o pericolo, dimostrando necessariamente una rapida capacità di adattamento e risposta, pena la selezione naturale. Guardando quindi anche con una prospettiva storica è possibile apprendere quali metodi si sono rivelati fallimentari e perché e, tramite queste osservazioni, fondare una base ulteriore di esperienza oggettiva e di tipo pratico.
In questo contesto appare evidente l’importanza che assume un lavoro di collaborazione interdisciplinare tra biologia e robotica, secondo cui partendo dalle ipotesi e dalle conoscenze biologiche del sistema, si ricercano nuovi aspetti e caratteristiche con strumenti ingegneristici di tipo quantificativo, e si costruiscono modelli fisici per la validazione delle teorie di partenza e per lo sviluppo di sistemi innovativi (figura 1.2).
Figura 1. 2 Schema dell’approccio al lavoro secondo l’idea della bioispirazione: un esempio è la serie
di robot Rehx e Sprowl, realizzati grazie alla collaborazione tra l’Università di Berkley e Stanford [13].
Un esempio dell’efficacia di un approccio simile è fornito dalla collaborazione tra le università di Berkley e di Stanford, che hanno realizzato una serie di robot capaci di muoversi in modo autonomo su terreni di diverso tipo grazie all’utilizzo di tecniche di stabilizzazione strutturale e del movimento ispirate a quelle degli artropodi [13].
Ma già prima, negli anni ’70, Shigeo Hirose del Tokyo Institute of Technology ha dato dimostrazione della funzionalità di questa collaborazione [14]. Ha infatti progettato un serpente robotico (figura 1.3) partendo dalle conoscenze biologiche riguardanti le modalità di locomozione senza le gambe: nella fase di realizzazione successiva è stato però verificato che le ipotesi di partenza non erano né complete né del tutto corrette, visto che il sistema robotico non si muoveva in modo del tutto uguale alla sua controparte naturale. Solo con successive ipotesi e progettazioni è stato possibile comprendere a pieno il reale tipo di meccanismo adottato e completare correttamente le lacune letterarie a riguardo.
Figura 1. 3 Il serpente robotico di Hirose: uno tra gli esempi dell’utilità della collaborazione tra
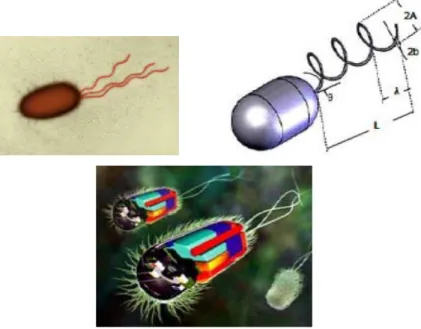
Ma l’ispirazione ai meccanismi di locomozione adottati nel mondo biologico parte anche da un livello microscopico: i batteri, ad esempio, sono diventati molto importanti per lo studio di robot che possono muoversi all’interno del corpo umano. Un esempio è la serie degli swimming micro-robots (figura 1.4), studiati alla Carnegie Mellon University da Behkam e Sitti (2004).
Figura 1. 4 Passi per la progettazione degli swimming micro-robots: dall’acquisizione di un’immagina
di E. Coli con la TEM (Transmission Electron Microscopy), alla progettazione di un micro-robot capace di muoversi attraverso propulsione con il movimento dei flagelli, fino alla futura realizzazione di micro-robot per applicazioni mediche.
Altro affascinante esempio che deve essere citato è lo StickyBot (figure 1.5), il gecko robotico, capace di muoversi su pareti in modo simile al suo modello naturale [15] (figura 1.6).
Figura 1. 6 Il gecko, con la particolare struttura delle zampe che gli permettono di aderire e muoversi
rapidamente su qualsiasi tipo di superficie, ha ispirato la costruzione di un robot in grado di arrampicarsi su pareti lisce verticali.
Questi ultimi due esempi e la serie dei robot Sprawl e Rehx sono importanti anche perché permettono di rendere l’idea di quello che si vuole intendere per collo di bottiglia tecnologico: la realizzazione, infatti, di parti di sistemi o di interi sistemi di dimensioni micro e nanometriche è stata possibile unicamente con la progettazione anche di nuove tecnologie di fabbricazione dedicate.
Un esempio riguardante la serie di robot ispirati agli artopodi: per la costruzione di robot robusti e di dimensioni molto ridotte, presso i laboratori della Stanford University, è stata messa a punto una tecnica di micro-fabbricazione, la SDM o Shape Deposition
Manufacturing, con cui è possibile realizzare strutture a più strati sopra un supporto e in
cui è possibile integrare più componenti (embedded design), come sensori o attuatori, e alternare strati di materiali diversi, di tipo soft o rigidi. Con la SDM è stato risolto il problema legato all’integrazione di componenti prefabbricati, non sempre facile da realizzare e soprattutto con il rischio che il risultato non sia poi sufficientemente robusto a seconda dello scopo. Lo stesso tipo di tecnologia è stata adoperata anche per la realizzazione delle zampe del gecko robotico, permettendo l’integrazione di materiali polimerici e fibre di carbonio (figura 1.6).
1.3 L’
Octopus
come fonte di ispirazione e tecnologie innovative
La caratteristica lampante dell’Octopus che, prima tra tutte, ha attirato l’attenzione di numerosi gruppi di ricercatori è senza dubbio l’elevato grado di mobilità che presenta il tentacolo. La destrezza e la flessibilità nei movimenti che derivano dagli infiniti gradi di libertà sono state di ispirazione per la progettazione e la realizzazione di diversi manipolatori robotici appartenenti al filone dei continuum robot, cioè di arti robotici con una struttura centrale continua e mobilità omnidirezionale [15], [17], [18], [19],. La realizzazione di questi sistemi è risultata di grande spessore per ciò che riguarda la robotica bioispirata, ma non possono essere considerati secondo un’ottica biomimetica in quanto non rispettano i principi costitutivi della morfologia naturale e non possono quindi essere adoperati come modelli fisici di validazione.
Presso l’Università di Clemson è stato sviluppato un braccio robotico, OCTARM, ispirato alla funzionalità del tentacolo, e capace di sollevare e manipolare oggetti di varie dimensioni e peso. Si muove attraverso un impianto pneumatico ad aria compressa che viene gestito attraverso un’interfaccia software.
Nella stessa università è stato sviluppato un altro manipolatore, che si ispira alla proboscide dell’elefante (Elephant trunk), realizzato con 16 sezioni cilindriche, sottili e ravvicinate e collegate con giunti rotoidali. L’attuazione del robot è a cavi, con molle per il richiamo elastico e con meccanismi di sottoattuazione (in totale ha 32 gradi di libertà, di cui solo 8 sono attivi).
Figura 1. 7 Immagine dell’Elephant trunk, il robot ispirato alla proboscide dell’elefante.
Ma, come detto prima, questi due manipolatori sono stati realizzati con un intento diverso da quello proposto dalla visione biomimetica.
Per ciò che riguarda le strutture muscolari idrostatiche (tentacoli, proboscide, lingua) non vi sono ancora esempi che possono essere intesi realmente di tipo biomimetico e che quindi possono funzionare come piattaforme fisiche per la validazione. Questo è dovuto anche al fatto che molti aspetti sul funzionamento di questi apparati restano sconosciuti.
L’Octopus mostra capacità di apprendimento e di memoria insolite per un invertebrato, e per questo è stato inteso come il paradigma dell’embodied intelligence: l’ipotesi è che l’esibizione di comportamenti intelligenti da parte di un animale che è un mollusco, sia attribuibile al fatto di essere dotato di una particolare struttura fisica, unica per le sue caratteristiche neuro-motorie e sensoriali, con cui è in grado di avere un’interazione eccellente con l’ambiente.
Capire quindi a fondo le caratteristiche meccaniche dei suoi tessuti, conoscere le performance di forza, la cinematica dei movimenti, le caratteristiche sensoriali, e le strategie di controllo adottate dal sistema nervoso può essere fonte di ispirazione per la ricerca e la progettazione di sistemi dotati di prestazioni strutturali di notevole rilevanza e gestiti in un modo semplice, ma affidabile.
L’Octopus può essere una fonte di idee a 360 gradi: per l’ispirazione nella progettazione di nuovi materiali, nuovi sensori, nuovi sistemi di attuazione, per nuove strategie di locomozione e per la gestione ed il controllo di sistemi complessi e ridondanti.
Le conoscenze sull’Octopus sono, allo stato attuale, non molto profonde ed essenzialmente basate su valutazioni qualitative o di tipo passivo (studi istologici o su tessuto ex vivo).
Dal punto di vista di una progettazione tecnologica funzionale è invece necessario avere anche una conoscenza di dati e misure quantitative che possono essere adottate come requisiti funzionali, ovvero specifiche tecniche.
Per questo si è voluto mettere in pratica un approccio diverso all’indagine, ricercando un metodo coerente per ottenere una valutazione delle reali prestazioni meccaniche e motorie, quindi con misure in vivo e all’interno del naturale contesto ambientale.
Le principali qualità che interessano sia il settore di sviluppo tecnologico della robotica che quello della biologia sono:
♦ Infiniti gradi di libertà: ciascun tentacolo è capace di eseguire virtualmente infiniti movimenti, con flessioni (bending) singole o multiple in ogni direzione dello spazio ed in qualsiasi punto, allungamento e accorciamento, o torsione; i tentacoli sono controllati in modo da muoversi in modo indipendente l’uno dall’altro o possono essere coordinati tra loro per l’esecuzione di movimenti complessi. I tentacoli sono sfruttati anche per muoversi sul fondale marino o per ancorarsi saldamente a rocce, pareti o qualsiasi altro tipo di superficie. I tentacoli, quindi, rappresentano una struttura estremamente affascinante per la realizzazione di manipolatori o strumenti di indagine. Possono ispirare la costruzione di dispositivi per applicazioni mediche: endoscopi flessibili con destrezza e cedevolezza controllate in modo da essere operativi in situ, arrivando anche in aree cerebrali. Possono ispirare la costruzione di
strutture dedicate all’esplorazione di ambienti ristretti ed impervi, con accesso attraverso cunicoli e strettoie di dimensioni variabili. Sui tentacoli si inizia ad avere ora un maggior numero di informazioni anatomiche o sul controllo, grazie alle nuove tecniche di indagine, ma restano ancora diversi interrogativi riguardo i pattern neurali per il coordinamento dei muscoli ed il grado di rilevanza dei diversi fasci muscolari per l’esecuzione di un certo tipo di movimento, cioè quanta forza di contrazione è necessaria e con quale andamento temporale.
♦ Performance meccaniche: che riguardano sia il tentacolo che il mantello (figura 1.8) e che, in un mondo tecnologico basato su strutture rigide, catturano l’attenzione di molti per la progettazione di soft-bodied robot con affidabilità e robustezza di pari grado.
Figura 1. 8 Un esempio di quello che si intende per performance meccaniche del tessuto che
costituisce il mantello del polpo: l’immagine è stata ripresa durante la cattura di un granchio e il polpo sfrutta la rapida ed elevata deformabilità del mantello per impedire la fuga della preda.
♦ Capacità sensoriali: di tipo chimico e di tipo tattile. Attraverso le ventose ed i chemiocettori presenti sulla superficie tessutale è in grado di percepire la presenza di cibo anche a distanza e al di fuori del campo visivo. Le ventose, in particolare, che sono controllate in modo indipendente l’una dall’altra, permettono di effettuare una discriminazione molto fine delle superfici, aumentando le già notevoli capacità di manipolazione dei tentacoli. Il meccanismo chimico-fisico e neurale resta però, allo stato dell’arte, ancora sconosciuto.
♦ Mimetismo: che viene usato molto frequentemente, sia per nascondersi dai predatori, sia come tecnica di caccia, e rende ancora più unica e interessante la struttura del tessuto del polpo. Nella parte epiteliale sono presenti dei pigmenti sensibili alla contrazione locale dei muscoli sottostanti: il livello del tono muscolare si traduce in una rapida variazione di colore.
♦ Controllo: la bassa posizione che occupa il polpo nella scala evolutiva è dovuta alla notevole semplicità strutturale del suo sistema nervoso. L’aspetto affascinante è che, nonostante questo, è in grado di gestire perfettamente le qualità appena descritte:
l’elevatissimo numero di gradi di libertà, le svariate performance motorie e di manipolazione, il coordinamento dei tentacoli e delle ventose, le capacità sensoriali e mimetiche. I meccanismi che sono alla base non sono ancora del tutto chiari. È noto che il merito è essenzialmente da attribuire ad un raffinato sistema nervoso decentralizzato, ovvero periferico, che permette un controllo sofisticato elemento per elemento a partire da semplici direttive provenienti dal sistema nervoso centrale: come sarà ripetuto in seguito, molti movimenti e comportamenti esibiti sono stereotipati, cioè riconducibili ad un unico pattern di base.
♦ Apprendimento: come si avrà modo di mostrare anche nel contesto di questo lavoro di tesi, il polpo possiede capacità di apprendimento e memoria. È in grado di associare oggetti e fenomeni, collegare stimoli a cause e adottare tecniche di comportamento sulla base di esperienze precedenti.
L’approccio all’indagine che è caratteristico della robotica biomimetica, con un’analisi diretta e quantitativa e l’uso di modelli e di piattaforme fisiche di valutazione può rivelarsi essenziale per la comprensione dei meccanismi neuromotori di questo esemplare e poterli sfruttare per la realizzazione di una serie di nuove tecnologie octopus-like con applicazione ad ampio raggio.