6. Analisi con Plaxis
6.1 Modellazione
In questo capitolo vengono illustrati i risultati ottenuti dallo studio di interazione effettuato tramite il codice di calcolo Plaxis. Le analisi sono state condotte sia in campo statico che in presenza di un evento sismico. Per raggiungere tale scopo vengono implementati i dati sul programma di calcolo Plaxis v.8.2, capace di effettuare un’analisi agli elementi finiti dell’interazione terreno-struttura.
I valori dei parametri di resistenza del terreno introdotti nell’analisi corrispondono a quelli caratteristici, per cui, ovviamente, non sono stati applicati fattori di sicurezza alle azioni.
6.1.1 Parametri generali
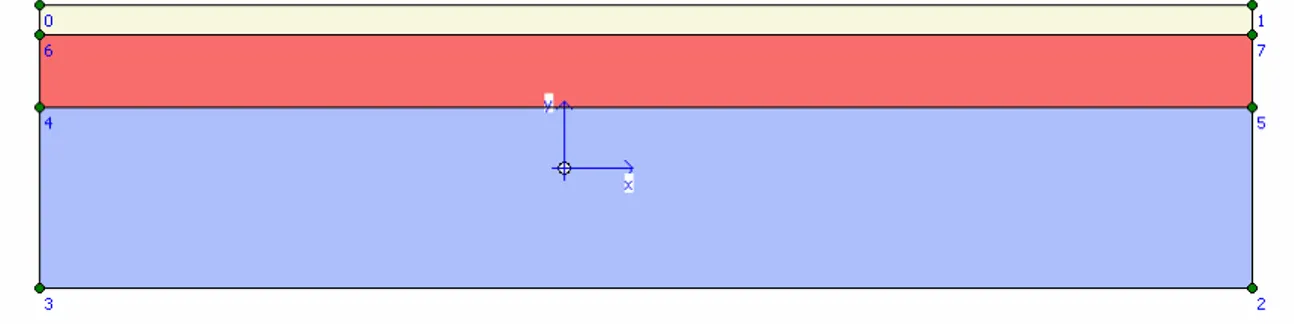
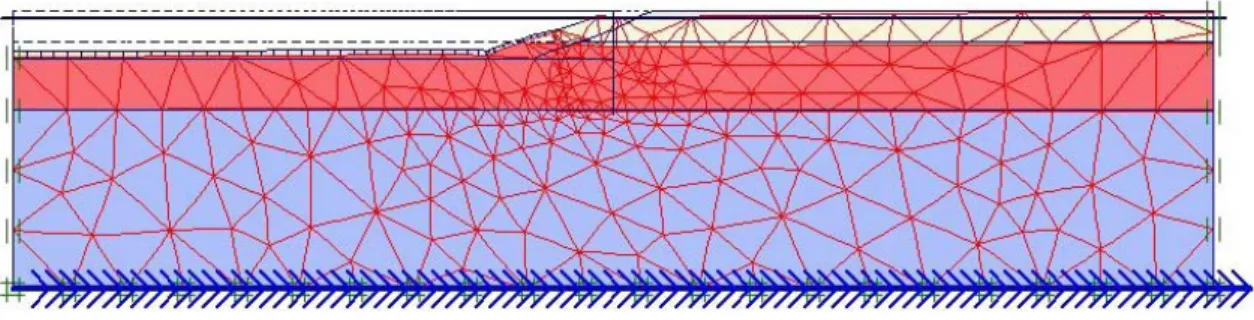
Il modello geometrico adottato è molto largo ed alto (300 x 70 m) per evitare, nelle elaborazioni in campo dinamico, di risentire dei cosiddetti effetti di contorno, quindi non reali ma dovuti alla schematizzazione effettuata. Viene data la possibilità di scegliere il tipo di elementi con cui verrà diviso il modello: la scelta è ricaduta su elementi triangolari a 15 nodi.
Figura 6.1: modello geometrico iniziale con assegnata stratigrafia su Plaxis
Il modello costitutivo del terreno scelto è quello elastico perfettamente plastico di Mohr-Coulomb che richiede l’inserimento dei seguenti parametri: il peso di volume γ, il coefficiente di permeabilità k, il modulo di Young E, il coefficiente di Poisson ν, la coesione c, l’angolo di attrito φ, l’angolo di dilatanza ψ.
Considerata la bassa velocità di applicazione dei carichi, il tipo di comportamento del terreno può essere indicato come drenato, non vengono generate di conseguenza sovrappressioni neutre.
La stratigrafia definita è quella indicata in Figura 2.2. a cui si aggiungono gli altri parametri richiesti da Plaxis e di cui sono riportati i valori adottati di seguito:
Tout Venaint 3 20 m kN unsat = ⋅ γ ; 20 3 m kN sat = ⋅ γ ; s m k kx = y =10−4⋅ ; 10000 2 m kN E= ⋅ ; 250 , 0 = ν ; 0,1 2 m kN c= ⋅ ; φ'= 38° ; ψ = 3° ; Limi Torbosi 3 5 , 18 m kN unsat = ⋅ γ ; 18,5 3 m kN sat = ⋅ γ ; s m k kx = y = ⋅ −8 10 ; 3000 2 m kN E= ⋅ ; 250 , 0 = ν ; 10 2 m kN c= ⋅ ; φ'= 23° ; ψ = 0° ; Limi Argillosi 3 20 m kN unsat = ⋅ γ ; 20 3 m kN sat = ⋅ γ ; s m k kx = y =10−8⋅ ; 6000 2 m kN E= ⋅ ; 250 , 0 = ν ; 15 2 m kN c= ⋅ ; φ'= 25° ; ψ = 0° ; Sabbie 3 17 m kN unsat = ⋅ γ ; 21 3 m kN sat = ⋅ γ ; s m k kx = y =5,78⋅10−6⋅ ; 12000 2 m kN E = ⋅ ; 3 , 0 = ν ; 1 2 m kN c= ⋅ ; φ'= 33° ; ψ = 3° ;
Il peso dell’unità di volume non saturo (γunsat) non entra quasi mai in gioco nei calcoli eseguiti, in quanto il livello di falda è stato scelto in equilibrio con le oscillazioni del mare. Il terreno è considerato praticamente tutto saturo ed in questi casi il programma suggerisce, a favore di sicurezza, di non utilizzare valori diversi di γsat e γunsat. Il problema per altro riguarda solo il primo strato di tout venaint che risulta l’unico influenzato dalle variazioni del livello dell’acqua.
I tiranti sono schematizzati come un elemento molla elastica a due nodi con rigidezza costante (rigidezza normale). Viene assunto un valore di EA= 2000⋅kN ed il passo è di 1,26 m.
La sezione della palancola scelta è la AZ 50 Fe 510, già utilizzata nel precedente capitolo per effettuare il confronto tra le normative; in queste elaborazioni viene effettutata anche la verifica di suddetta sezione, le cui caratteristiche geometriche e meccaniche sono facilmente reperibili su qualsiasi prontuario. Per il momento e lo sforzo normale di plastizzazione si assumono i seguenti valori:
m m kN Mp ⋅ ⋅ = 1490 ; m kN Np = 8772⋅
6.1.2 Parametri per l’analisi dinamica
6.1.2.1 Calcolo dei coefficienti di smorzamento di Rayleigh
Relativamente all’analisi dinamica si possono avere due tipi di smorzamento:
• smorzamento viscoso; viene messo in conto utilizzando i coefficienti di smorzamento alla Rayleigh che crescono con la frequenza.
• smorzamento isteretico; non dipende dalla frequenza ma dal livello di deformazione messo in conto implicitamente dal modello elasto-plastico.
I coefficienti di smorzamento di Rayleigh andrebbero tarati in modo da riprodurre correttamente il moto in superficie. La soluzione semplificata, riproposta di seguito, permette di calcolare i coefficienti di smorzamento, da inserire nel programma di calcolo, mediante un’equazione di terzo grado derivante dalla risoluzione di un problema agli autovalori:
[ ]
[ ]
(
K −ω2 M)
⋅u=0dove [K] indica la matrice delle rigidezze, ω la frequenza, [M] la matrice delle masse e u gli spostamenti. L’equazione (6.1) ammette una prima soluzione banale u=0 ed una seconda se e solo se risulta verificata la seguente condizione:
[ ]
[ ]
(
)
0det K −ω2 M =
(6.1)
L’equazione (6.2) è un’equazione algebrica di grado N detta equazione di frequenza. Le sue N incognite sono le N frequenze proprie relative agli N modi di vibrare del sistema discreto di N masse concentrate. La (6.2) è anche detta equazione caratteristica o equazione secolare del problema agli autovalori. Essa ammette soluzioni reali e positive che si dicono autovalori ed il cui insieme è detto spettro degli autovalori.
Considerando tutti i dati del problema gli elementi delle matrici di rigidezza e delle masse si calcolano, rispettivamente, nel seguente modo:
mi = ρi⋅hi ⎥⎦ ⎤ ⎢⎣ ⎡ ⋅ 2 2 s m kPa ;
[ ]
38 , 124 0 0 0 54 , 7 0 0 0 20 , 10 0 0 0 0 0 0 3 2 1 = = m m m M i i i h G K = ⎥⎦ ⎤ ⎢⎣ ⎡ m kPa ;[ ]
19112 13084 0 13084 49782 36698 0 36698 36698 0 0 3 2 2 2 2 1 1 1 1 − − − − = + − − + − − = K K K K K K K K K K Per cui:[ ]
[ ]
z z z M K ⋅ − − − ⋅ − − − ⋅ − = − 379 , 124 524 , 0 0003565 , 0 0 0003565 , 0 544 , 7 357 , 1 1 0 1 195 , 10 1 2 ω operando la sostituzione 36698 2 ω =z al fine di semplificare i calcoli.
Calcolando il determinante della (6.5) si ha l’equazione di terzo grado cercata:
0 707 , 0 92 , 179 045 , 2699 113 , 9566 ⋅ 3 + ⋅ 2 − ⋅ + = − z z z
le radici della (6.6) forniscono i seguenti valori delle frequenze proprie del sistema in [rad/s] 2 , 81 0 , 60 4 , 12 3 2 1 = ω ω ω
Sostituendo ciascun valore ωi nella (6.2) questa risulterà identicamente soddisfatta. A questo punto è possibile calcolare i coefficienti di smorzamento di Rayleigh (Ohsaki,
(6.7) (6.6) (6.5) (6.4) (6.3)
1982) in funzione della frequenza e di un fattore di damping β0 che viene fissato pari a 0,01: 205 , 0 2 2 1 2 1 0 = + = ω ω ω ω β α ; 2 0,000276 2 1 0 = + = ω ω β β
I coefficienti sono uguali per tutti gli strati, essendo stati calcolati come una media dello smorzamento lungo la fascia di terreno presente tra substrato roccioso e superficie; vengono inseriti nel programma di calcolo.
6.1.2.2 Elaborazione accelerogrammi per l’analisi dinamica. EERA
Il valore dell’accelerazione massima relativo alla zona di Livorno-Calambrone è stato ricavato dallo studio di pericolosità dell’Istituto Nazionale di Geofisica e Vulcanologia (INGV), che ha definito per l’intero territorio nazionale i valori di accelerazione massima al suolo (Pick Ground Acceleration) attesi, per diversi periodi di ritorno, ai vertici di una maglia di lato pari a 0,05°. L’opera è considerata di classe 1 per cui la vita utile, secondo le indicazioni del D.M. 14/09/2005, è 50 anni e il periodo di ritorno da considerare per i fenomeni naturali è 500 anni (circa 475 anni); ne consegue che la frequenza annuale di superamento è pari a 0,021. Il valore di accelerazione massima indicato dall’INGV relativo a questa frequenza annuale di superamento, al 50° percentile e alla zona di Livorno-Calambrone, è
1248 , 0 ) (g = a
Questo valore è però misurato su affioramento roccioso, mentre il programma di calcolo Plaxis richiede l’inserimento di accelerogrammi su substrato roccioso. Per questo motivo non basta scalare gli accelerogrammi in ingresso al valore INGV, ma occorre venire a conoscenza dell’accelerazione massima su substrato roccioso che un’accelerazione su affioramento roccioso pari alla (6.9) determina. Per fare questo si ricorre all’analisi di risposta sismica locale utilizzando un codice monodimensionale lineare-equivalente di nome EERA (Equivalent-linear Earthquake Response Analyses). EERA è un moderno sviluppo del concetto di analisi lineare-equivalente per risposta sismica su depositi di terreno e richiede l’inserimento di numerosi dati relativi alla descrizione delle caratteristiche del suolo e degli strati di terreno. Il programma richiede, oltre ai parametri meccanici tradizionali, i valori di quelli riportati di seguito:
(6.8)
• l’inserimento delle velocità delle onde di taglio VS.
Con questo valore viene automaticamente calcolato il modulo di taglio Gmax, dalla formula
2
max VS
G =ρ⋅
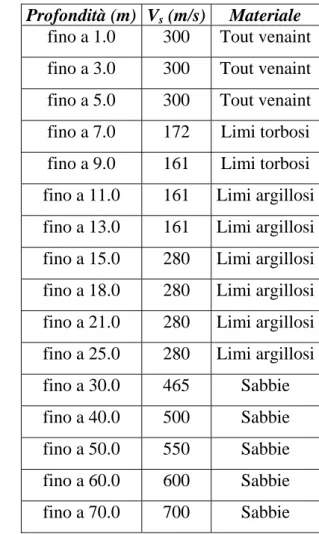
In mancanza di dati relativi all’ubicazione del substrato roccioso viene ipotizzata una profondità di 70 m con una VS pari a 700 m/s. Nei 70 m di deposito l’andamento delle VS (Figura 6.2 e Tabella 6.1) viene ottenuto dai dati delle prove sismiche effettuate in sito fino alla profondità di 30 m, escluso lo strato di tout venaint per cui VS è assunto pari a 300 m/s; per profondità maggiori viene ipotizzato un aumento lineare fino al raggiungimento del valore di 700 m/s considerato inerente al substrato roccioso.
Profondità (m) Vs (m/s) Materiale
fino a 1.0 300 Tout venaint fino a 3.0 300 Tout venaint fino a 5.0 300 Tout venaint fino a 7.0 172 Limi torbosi fino a 9.0 161 Limi torbosi fino a 11.0 161 Limi argillosi fino a 13.0 161 Limi argillosi fino a 15.0 280 Limi argillosi fino a 18.0 280 Limi argillosi fino a 21.0 280 Limi argillosi fino a 25.0 280 Limi argillosi fino a 30.0 465 Sabbie fino a 40.0 500 Sabbie fino a 50.0 550 Sabbie fino a 60.0 600 Sabbie fino a 70.0 700 Sabbie (6.10) Tabella 6.1: valori di VS
• l’inserimento delle curve di decadimento del modulo G/Gmax in funzione della sollecitazione di taglio ciclico γc.
La forma di queste curve dipende dall’indice di plasticità (IP) (Figura 6.3) e questa caratteristica è estremamente importante perché influenza il modo in cui un deposito amplifica o attenua gli effetti del sisma. Il comportamento di G/Gmax
dipende, specialmente nei suoli a bassa plasticità, anche dalla pressione efficace di confinamento (Iwasaki e altri, 1978; Kokoshu, 1980). Gli effetti di quest’ultimi sul comportamento del modulo di decadimento G/Gmax sono stati combinati da Ishibashi e Zhang (1993) con la seguente espressione:
( 0) ' max m m m K G G = ⋅σ − dove ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + ⋅ = 492 , 0 000102 , 0 ln tanh 1 5 , 0 γ n K
(
1,3)
4 , 0 0 exp 0,0145 00056 , 0 ln tanh 1 272 , 0 IP m m ⋅ − ⋅ ⎪⎭ ⎪ ⎬ ⎫ ⎪⎩ ⎪ ⎨ ⎧ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − ⋅ = − γ ⎪ ⎪ ⎩ ⎪ ⎪ ⎨ ⎧ ⋅ ⋅ ⋅ = − − − 115 , 1 5 976 , 1 7 404 , 1 6 10 7 , 2 10 0 , 7 10 37 , 3 0 , 0 IP IP IP n per per per per 70 70 15 15 0 0 > ≤ < ≤ < = IP IP IP IP• l’inserimento delle curve di decadimento del fattore di smorzamento (Damping Ratio) in funzione della sollecitazione di taglio ciclico γc.
Così come il modulo G/Gmax anche il fattore di smorzamento è influenzato dalle
caratteristiche di plasticità (Figura 6.4) e dalla pressione efficace di confinamento, specialmente per suoli a bassa plasticità. Ishibashi e Zhang (1993) hanno sviluppato un’espressione empirica per il calcolo del fattore di smorzamento nel caso di suoli plastici e non plastici. Utilizzando la (6.11) per ricavare il modulo G/Gmax, il fattore di smorzamento è dato dalla seguente
(
)
⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ + ⋅ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ ⋅ ⋅ ⋅ − + ⋅ = 0,586 1,547 1 2 0145 , 0 exp 1 333 , 0 max 2 max 3 , 1 G G G G IP ξ (6.11) (6.14) (6.13) (6.12) (6.15)Per ogni strato di terreno fino al substrato roccioso si ottengono le curve di decadimento del modulo G/Gmax e del fattore di smorzamento. Gli indici di plasticità adottati sono quelli indicati nel Capitolo 2 mentre come valore della pressione efficace viene indicato il valore σ'm= 100⋅kPa.
Figura 6.3: curve di decadimento di G/Gmax per differenti valori di IP
Figura 6.4: curve di decadimento del fattore di smorzamento per differenti valori di IP
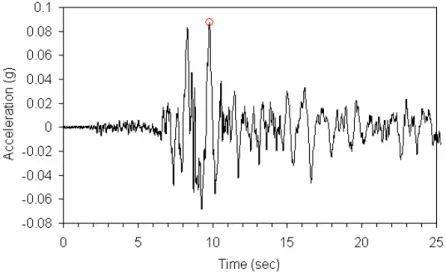
Una volta inseriti questi dati relativi al terreno, si devono scalare gli accelerogrammi all’accelerazione massima desiderata. Vengono inseriti 7 accelerogrammi naturali
registrati in superficie in varie parti del mondo in modo da poter fare successivamente una media degli effetti sulla struttura come indicato dalla Normativa. In uscita da EERA si ottengono gli accelerogrammi su substrato roccioso riportati di seguito con una intervallo di campionamento, in questo caso, di 0,01 sec.
Figura 6.5: accelerogramma n.1 (Friuli, 11/09/1976) con amax(g)=0,064
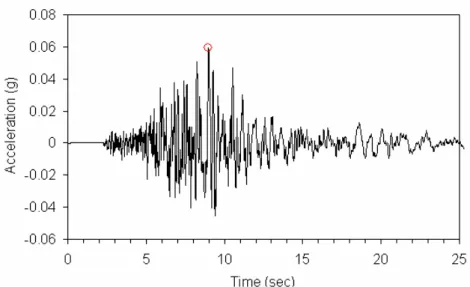
Figura 6.7: accelerogramma n.3 (Kalamata-Grecia del sud, 13/09/1986) con amax(g)=0,066
Figura 6.8: accelerogramma n.4 (Erzican-Turchia, 13/03/1992 )con amax(g)=0,106
Figura 6.10: accelerogramma n.6 (Parkfield, 28/09/2004) con amax(g)=0,059
Figura 6.11: accelerogramma n.7 (Parkfield, 28/09/2004) con amax(g)=0,066
6.2 Elaborazioni con Plaxis
Quando il modello è completamente definito e le proprietà dei materiali sono state assegnate a tutti gli strati ed agli oggetti strutturali, la geometria viene divisa in elementi finiti prima di poter eseguire il calcolo. Un insieme di elementi finiti è definito con la parola mesh che, una volta generata, è stata infittita globalmente ed in particolare nelle zone dove sono previste più alte concentrazioni di tensione ed elevati gradienti di deformazione: intorno alla palancola e intorno all’ancoraggio.
Una volta creato il modello geometrico e generata la mesh agli elementi finiti, è necessario specificare la configurazione geometrica e lo stato di tensione iniziali. Lavorando con le tensioni efficaci, Plaxis necessita anche del livello di falda freatica
che, in questo caso, è considerato in equilibrio con il livello del mare. La configurazione geometrica iniziale permette di disattivare gli elementi che inizialmente non sono presenti, quali il riempimento di tout venaint, in modo da generare le tensioni iniziali.
Dopo la generazione del modello agli elementi finiti, può essere eseguito l’effettivo calcolo ma è necessario definirne il tipo (plastic, phi-c reduction, consolidation o dynamic analysis) e quali tipi di sollecitazioni o fasi di costruzione (total multipliers, staged construction o incremental multipliers) debbano essere attivati durante i calcoli. Le Fasi di costruzione, oltre alla Fase iniziale, sono definite dalle Fasi da 1 a 8, che rappresentano la parte statica dello studio in oggetto, e dalle Fasi da 9 a 15 che rappresentano la parte dinamica in cui si ha l’inserimento degli accelerogrammi. Quest’ultime sono riportate nelle figure seguenti dove le deformazioni del sistema sono scalate diverse centinaia di volte, e quindi eccessive, per facilitarne la comprensione:
Fase Iniziale
Figura 6.12: situazione iniziale
Fase 1: Generazione delle tensioni iniziali
Figura 6.13: generazione delle tensioni iniziali per incremento della gravità
La generazione delle tensioni iniziali in Plaxis può essere fatta mediante la “procedura K0” (K0-procedure) introducendo un valore della spinta a riposo K0 prima delle fasi di
peso proprio del terreno. L’equilibrio completo si ottiene soltanto per un piano di campagna orizzontale con tutti gli strati di terreno ed i livelli di falda paralleli a questa superficie. Se invece la situazione è quella della zona oggetto di studio, un terreno con una scarpata che degrada verso il mare, le tensioni sono sostanzialmente squilibrate e la procedura K0 deve essere abbandonata a favore della “Generazione delle tensioni
iniziali per incremento della gravità” (Gravity loading). Con quest’ultimo metodo le tensioni sono generate applicando il peso proprio del terreno nella prima fase di calcolo. Una volta impostate le tensioni iniziali, gli spostamenti devono essere azzerati all’avvio della successiva fase di calcolo in modo da rimuovere l’effetto sugli spostamenti iniziali dei calcoli successivi.
Fase 2: Infissione della palancola
Figura 6.14: attivazione della palancola e simulazione degli effetti dell’infissione
Fase 3: Carico tout venaint
Fase 4: Messa in tiro del tirante
Figura 6.16: pretensionamento del tirante
Il questa fase vengono attivati il tirante ed il relativo ancoraggio. Il tirante viene pretensionato con un carico di 70 kN/m.
Fase 5: Primo dragaggio
Figura 6.17:prima fase del dragaggio
Fase 6: Secondo dragaggio
Figura 6.18: seconda fase del dragaggio
Vengono inserite due fasi intermedie di dragaggio per non causare l’improvvisa comparsa di tensioni aggiuntive dovute alla rimozione di materiale al piede dell’opera di sostegno.
Fase 7: Carico piazzale
Figura 6.19: attivazione del carico piazzale
In questa fase viene attivato il carico previsto in banchina pari a 15 kN/m2,così come indicato nel precedente capitolo in seguito alla definizione della destinazione d’uso della zona a tergo dell’opera.
Fase 8: Tiro bitta
Figura 6.20: attivazione del tiro bitta
Il tiro bitta, così come indicato nel precedente capitolo, è applicato 1 m sopra il L.M.M. ed è pari a 15 kN/m.
Fase 9→15: Elaborazione degli accelerogrammi
Di queste fasi non vengono riportate le immagini relative alle deformazioni finali che si ottengono in uscita dal programma perché non sarebbero rappresentative delle deformazioni finali del sistema palancola-tirante-terreno. Per evitare di avere una “fotografia” del momento in cui termina l’oscillazione dovuta al sisma e che non rappresenta alcunché, si devono analizzare i diagrammi delle deformazioni e gli inviluppi dei momenti lungo la durata della fase dinamica.
6.2.1 Risultati dell’analisi statica e dinamica
Si riportano nelle figure seguenti i dati in uscita da Plaxis riguardanti le varie fasi. Per l’analisi statica si riportano il diagramma degli spostamenti orizzontali ed il diagramma del momento relativi alla Fase 8, ultima fase statica. Per quanto riguarda invece l’analisi dinamica si riportano i seguenti diagrammi:
• diagrammi degli spostamenti orizzontali
• diagrammi dell’inviluppo dei momenti a fine fase
In fondo ad ogni figura sono riportati i valori massimi degli spostamenti orizzontali e del momento lungo l’intera palancola.
6.2.1.1 Analisi statica
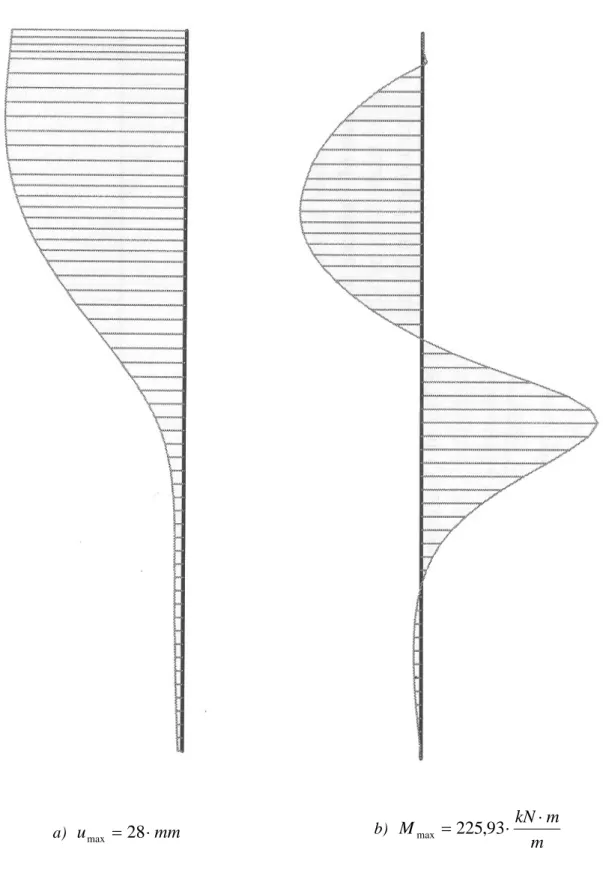
Figura 6.21: diagramma spostamenti (a) e diagramma momenti (b) Fase 8
a) umax = 28⋅mm b)
m m kN Mmax =225,93⋅ ⋅
6.2.1.2 Analisi dinamica
Figura 6.22: diagramma spostamenti (a) e diagramma inviluppo momenti (b) Fase 9
a) umax = 29⋅mm b) m
m kN Mmax =235,83⋅ ⋅
Figura 6.23: diagramma spostamenti (a) e diagramma inviluppo momenti (b) Fase 10
a) umax = 38⋅mm b) m
m kN Mmax =260,20⋅ ⋅
Figura 6.24: diagramma spostamenti (a) e diagramma inviluppo momenti (b) Fase 11
a) umax = 28⋅mm b) m
m kN Mmax =242,45⋅ ⋅
Figura 6.25: diagramma spostamenti (a) e diagramma inviluppo momenti (b) Fase 12 a) umax = 26⋅mm b) m m kN Mmax =254,77⋅ ⋅
Figura 6.26: diagramma spostamenti (a) e diagramma momenti (b) Fase 13 a) umax = 20⋅mm b) m m kN Mmax =233,13⋅ ⋅
Figura 6.27: diagramma spostamenti (a) e diagramma inviluppo momenti (b) Fase 14
a) umax = 34⋅mm b) m
m kN Mmax =234,85⋅ ⋅
Figura 6.28: diagramma spostamenti (a) e diagramma inviluppo momenti (b) Fase 15
a) umax = 41⋅mm b)
m m kN Mmax =236,25⋅ ⋅
6.2.2 Verifiche
I tiranti non vengono verificati in quanto sono stati considerati come molle elastiche a rigidezza costante.
I dati relativi agli spostamenti massimi subiti dalla struttura e dei momenti massimi nelle varie fasi di calcolo, sono riportati nella seguente Tabella 6.2.
Analisi
statica Analisi dinamica
Fase 8 9 10 11 12 13 14 15 Spostamento massimo (mm) 28 29 38 28 26 20 34 41 Momento massimo (kNm/m) 225,93 235,83 260,20 242,45 254,77 233,13 234,85 236,25
Tabella 6.2: risultati numerici delle elaborazioni con Plaxis
Dalla Tabella 6.2 si ricavano i seguenti valori massimi:
mm
umax = 38⋅ spostamento massimo m
m kN
Mmax =260,20⋅ ⋅ momento massimo
Lo spostamento massimo, come ben evidenziato dai diagrammi relativi alle varie fasi, non rappresenta lo spostamento in testa alla palancola ma quello di una sezione distante, pressoché in tutti i casi analizzati, circa 5 m dalla sommità. Sempre dai diagrammi si evidenzia però come il valore in testa alla palancola non si discosti molto dal massimo; per tale motivo può essere considerato come lo spostamento atteso in superficie. Lo spostamento registrato risulta inferiore ai 100⋅mm che viene indicato come il massimo accettabile in testa alla palancola.
Per quanto riguarda il momento massimo si verifica lo stato limite ultimo elastico della sezione AZ 50 Fe 510 scelta, per cui si ha:
2
3550 cm daN
2 3087 15 , 1 3350 cm daN f f m yk
yd = γ = = ⋅ resistenza di calcolo dell’acciaio
Il modulo di resistenza della palancola AZ 50 è W =5015 cm⋅ 3. La tensione agente nella sezione è pari a:
yd y f cm daN W M f = max = = ⋅ 2 < 5 , 518 5015 2602000
per cui risulta ampiamente verificata.
(6.17) (6.16)