CAPITOLO 5
TEST E CONFRONTI DEI PROTOCOLLI DI ROUTING
In questo capitolo vengono discussi i risultati presentati in letteratura riguardo al confronto fra gli algoritmi di routing discussi nel capitolo 4. I risultati sono stati ottenuti tramite simulazioni ed in alcuni casi si sono utilizzati modelli di movimento dei veicoli che tengono conto del comportamento dei conducenti, del tipo di veicoli, del loro tempo di vita e delle loro parti soggette ad usura (ad esempio ammortizzatori o frecce direzionali).
Sono quindi messe a confronto le prestazioni dei protocolli in modo da poter avere parametri qualitativi che contribuiscano alla creazione di una visione globale e delle caratteristiche dei vari protocolli.
Vengono presentati i risultati di due studi differenti[67, 4], in uno si paragonano i protocolli GPSR e DSR applicati ad uno scenario urbano, nell'altro si paragonano i protocolli SPF, EXBF, DSDV, TORA, DSR ed AODV utilizzando un altro scenario ed un differente simulatore.
5.1 TEST E CONFRONTI DEI PROTOCOLLI
L'elevato numero di protocolli per le reti mobili disponibile in letteratura rende necessario effettuare alcuni test per ottenere una valutazione oggettiva delle classi di protocolli e delle loro performance.
In letteratura non esistono molti studi che tentano di confrontare tra loro i vari protocolli disponibili in modo da poter avere risultati confrontabili, esistono per lo più studi che mostrano alcune peculiarità dei protocolli, come ad esempio [61] o al
più confrontano coppie di protocolli, vedi [62, 63].
In questo capitolo si cercherà di effettuare dei confronti tra vari protocolli in modo da avere dati paragonabili tra loro e trarre conclusioni generali da essi. In particolare, verrano presi in considerazione alcuni protocolli delle singole classi (i più rappresentativi per ogni classe dello schema figura 4.35 del capitolo precedente).
Si presentato i risultati dei i test in ambienti omogenei in modo da poter confrontare i risultati. Alcuni dei risultati presentati utilizzano dei simulatori di traffico per avere dati più realistici.
Queste simulazioni possono essere classificate in base ad un approccio microscopico o macroscopico[44]. L'approccio macroscopico mostra la densità del traffico, il flusso, i dati con i quali è possibile studiare la capacità di flusso delle strade e la distribuzione dei veicoli su essa. In generale la prospettiva macroscopica del traffico veicolare è vista come un fluido semi comprimibile e talvolta modellato come una speciale derivazione delle equazioni di Navier-Stokes. L'approccio microscopico invece si occupa dei singoli movimenti dei veicoli. I due approcci a volte non ottengono gli stessi risultati sui loro test.
In alcuni casi, per ottenere maggiori precisioni sui risultati delle simulazioni, vengono associate ad esse anche dei modelli comportamentali dei conducenti, detti anche Driver Behavior Model [45,46]. L'uso di tali modelli permette di ottenere risultati talmente dettagliati da essere utilizzati da aziende produttrici di veicoli per determinare il tempo di vita e di usura di parti dei veicoli.
Nei prossimi paragrafi verranno presentati dei confronti tra il protocollo DSR della classe topology based tipo reactive e il protocollo della classe location based GPSR utilizzando un simulatore (FARSI). Verranno presentati infine i confronti tra i vari protocolli delle varie classi ottenuti utilizzando il simulatore MaRS.
5.2 CONFRONTO TRA IL PROTOCOLLO GPSR E PROTOCOLLO DSR
In rappresentanza delle strategie reattive topology-based e delle strategie position-based viene studiato in [5] il comportamento del protocollo DSR e del protocollo GPSR-RLS. Questi due protocolli sembrano avere caratteristiche molto
interessanti per le reti VANET.
Per ottenere una omogeneità sulla simulazione è stato utilizzato lo stesso simulatore e gli stessi parametri per i diversi protocolli: come simulatore è stato adottato un tool denominato FARSI ed è stato definito lo stesso scenario di simulazione per entrambi i protocolli.
Generalmente il simulatore FARSI è impiegato per le simulazioni di prodotti ancora in fase di studio o in fase di sperimentazione, in quanto tali simulazioni offrono velocità realistiche, distanze veritiere tra i veicoli e proprietà viarie, come il flusso del traffico e l'utilizzo delle corsie stradali.
5.2.1 Scenario di simulazione e osservazioni
Lo scenario di simulazione su cui vengono eseguiti i test è un'ipotetica autostrada di lunghezza di 30 km a due corsie per direzione con una media di 6 veicoli per chilometro a corsia. Inoltre viene assunto che il 15% dei veicoli è di tipo pesante (camion, TIR, eccetera). Nello scenario viene definita una velocità media “desiderata” indicata con vf, con il valore di 130 km/h.
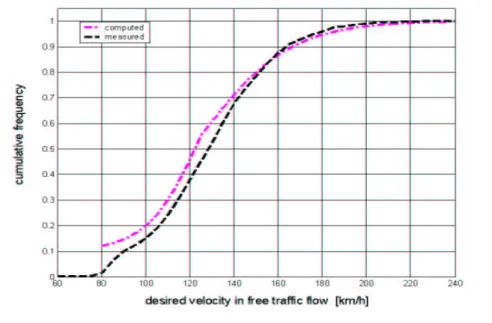
Questo scenario rappresenta tipicamente il traffico giornaliero di una autostrada tedesca. In figura 5.1 viene mostrata distribuzione media delle velocità iniziali dei veicoli all'inizio di una simulazione con il tool FARSI.
Da notare in figura 5.2 che la corrispondente distribuzione cumulativa realizzata dal FARSI è molto simile ad una distribuzione cumulativa creata utilizzando misurazioni reali in una autostrada tedesca.
L'utilizzo delle corsie in autostrada in questo scenario è pari al 57,2% per la corsia destra e al 42,8% per quella sinistra. Questi sono i valori tipici del traffico giornaliero su un'autostrada tedesca dove ai veicoli è permessa la possibilità di poter percorrere entrambe le corsie per lunghi periodi.
Per quanto riguarda i parametri nelle simulazioni effettuate, si assume che 2 nodi possono comunicare solo se si trovano in un raggio di 250 metri di distanza tra loro.
Considerando l'alta densità dei nodi lungo il tragitto di simulazione (6 per corsia per chilometro) e supponendo che i nodi siano equamente distribuiti lungo l'autostrada, il partizionamento della rete dovrebbe essere poco frequente.
Per determinarne la connettività, i nodi sono monitorati per 200 secondi lungo un percorso di 10 Km. Viene quindi calcolato per ogni nodo quali sono i nodi raggiungibili nel caso di una spedizione di un messaggio in un raggio di 3 Km. Si effettuano perciò due esperimenti, il primo in cui si impedisce la comunicazione tra veicoli che viaggiano in direzioni opposte, il secondo nel quale tutti veicoli presenti sulle quattro corsie possono comunicare tra loro.
Un tipico esempio di connettività dei nodi (i veicoli) della rete lungo il tragitto autostradale simulato è rappresentato in figura 5.3.
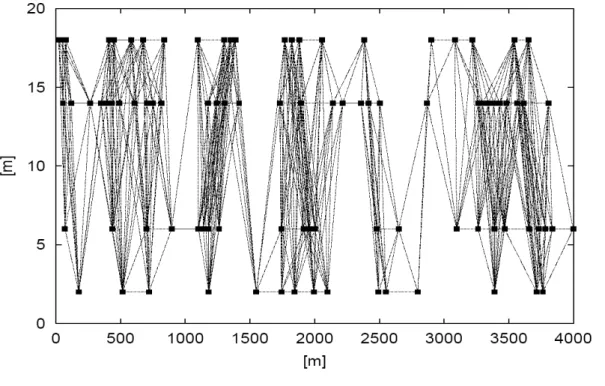
In figura 5.4 viene mostrato uno schema di connettività dei nodi della rete lungo una direzione di marcia.
Figura 5.3: Esempio di connettività dei veicoli lungo un tratto di autostrada. Nell'immagine
superiore al routing per le comunicazioni tra 2 veicoli partecipano solamente quelli lungo una direzione di marcia. Nell'immagine inferiore invece al routing partecipano i veicoli in entrambe le direzioni di marcia
Figura 5.4: Esempio di connettività dei nodi in una rete dove le comunicazioni vengono effettuate
Come visibile in figura 5.4, la rete lungo le due direzioni è partizionata in vari punti. Motivo di tale partizionamento è la diversa velocità dei veicoli che determinano la loro non equa distribuzione lungo il percorso.
In figura 5.5 è invece mostrata la medesima rete ma nella situazione in cui la comunicazione tra tutti i nodi è permessa in tutte le quattro corsie dell'autostrada, cioè la situazione in cui tutti i nodi di tutte le direzioni contribuiscono al routing dei pacchetti.
In quest'ultimo caso, in figura 5.5, si può notare che il partizionamento della rete risulta essere molto più basso poiché la distribuzione dei veicoli nell'area geografica considerata è più uniforme. Inoltre bisogna capire in che modo il partizionamento della rete dipende dal raggio di trasmissione dei veicoli.
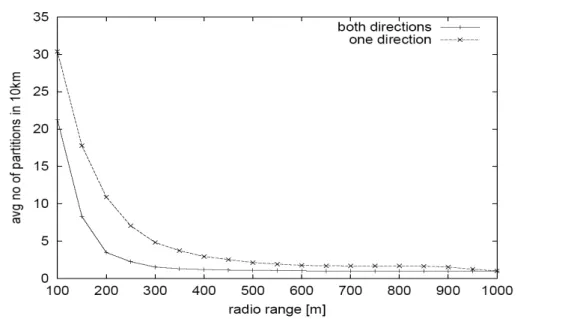
In figura 5.6 è mostrato attraverso l'uso di due grafici il numero di partizioni in un segmento autostradale pari a 10 Km.
Figura 5.5: Esempio di connettività dei nodi in una rete dove le comunicazioni vengono effettuate
La curva puntiforme più alta indica il numero di partizioni della rete nel momento in cui solo i veicoli che viaggiano lungo la stessa direzione sono considerati potenzialmente utili all'inoltro dei pacchetti. È possibile vedere che in un tipico raggio di azione 802.11 IEEE (250m) si hanno 7 partizioni nel caso in cui i veicoli prendano in considerazione solo nodi lungo la stessa direzione.
Il numero di partizioni si riduce a 2 quando tutti i veicoli partecipano al routing. Dal grafico si evidenzia che il raggio d'azione che offre le migliori prestazioni in termini di numero di partizioni e di costi è pari a 400m nel caso di comunicazione tra tutti i nodi, mentre 1000m nel caso di comunicazioni ai soli nodi della stessa direzione.
5.2.2 Parametri di simulazione
In dettaglio i parametri di simulazione utilizzati per entrambi i protocolli sono i seguenti:
• tempo di simulazione: 200 secondi • lunghezza autostrada: 10 km • numero veicoli: 300
• payload messaggio: 64byte
• distanza massima tra veicoli:500-4500 metri
• i veicoli possono avere direzioni in entrambi i sensi di marcia
Inoltre sono stati impiegati 2 MAC diversi per le varie simulazioni, il MAC 802.11 e un O-MAC, quest'ultimo è un MAC teorico che permette la comunicazione tra due nodi a distanza di 250m e nessun limite superiore per le trasmissioni di dati. Le collisioni dei pacchetti nel caso di utilizzo del O-MAC si ipotizzano inesistenti.
5.2.3 Pattern di comunicazione
Per la determinazione del pattern, ad ogni istante sono presenti 10 coppie di veicoli. Queste coppie sono selezionate casualmente e sono formate da un veicolo mittente ed uno destinatario. Si ipotizza che un veicolo mittente ed uno destinatario non sono soggetti a problemi di comunicazione e che entrambi si trovano all'interno dell'area di copertura dei raggi di trasmissione delle rispettive antenne. Il mittente spedisce 4 pacchetti al secondo per un tempo massimo di 5 secondi.
L'inizio di ogni comunicazione è determinata in maniera casuale, in modo da evitare eventuali sincronizzazioni tra veicoli. Ogni volta che un messaggio viene recapitato al destinatario, il destinatario a sua volta invia un messaggio di risposta.
5.2.4 Setup del GPSR e del RLS
Gli intervalli di propagazione dei pacchetti di beacon sono rispettivamente di [0.25, 0.5, 1, 2] secondi, in questo modo è possibile studiare quanto incidono questi pacchetti in una comunicazione tra nodi e quanto al sovraccarico di rete.
Il servizio di localizzazione utilizzato è quello con espansione ad anello con passo lineare e con passo esponenziale. Il timeout per l'espansione dell'anello di diffusione dei messaggi per il servizio di localizzazione è di 100ms, trascorsi i quali, il passo viene incrementato di un ulteriore hop. Viene anche definito il limite
superiore di espansione dell'anello, inteso come massimo numero di hop possibili. Tale limite è di 32 hop.
5.2.5 Risultati delle simulazioni
Nei test che vengono effettuati per entrambi i protocolli in [5] si usa un anello di espansione dei messaggi di tipo lineare con passo 1. L'unica differenza presente riguarda il livello MAC. Nel primo esperimento le simulazioni vengono effettuate utilizzando un MAC di tipo O-MAC mentre nel secondo viene utilizzato un MAC 802.11.
5.2.5.1 Simulazione con utilizzo del MAC 0-MAC
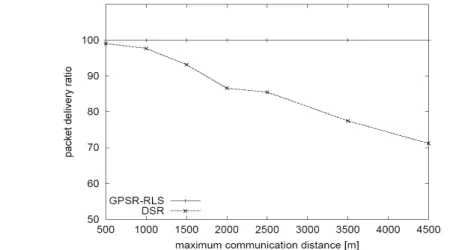
Nella simulazione effettuata utilizzando il MAC di tipo 0-MAC si è notato che molti messaggi non sono stati recapitati ai destinatari in quanto non raggiunti dal flooding. Il problema è molto frequente quando due veicoli cercano di comunicare tra loro ma percorrono direzioni diverse. Questo è dovuto al fatto che la diffusione dei messaggi di broadcast nei protocolli risulta essere più lenta rispetto alla velocità di allontanamento dei veicoli lungo le loro direzioni. Da tale osservazione si deduce che il sistema di localizzazione tramite espansione lineare non è in grado di soddisfare i requisiti richiesti. In in figura 5.7 è mostrata la metrica della consegna dei pacchetti nel DSR e nel GPSR in base all'aumento della distanza della comunicazione.
Da notare che in figura 5.7 dei test sulle varianti del GPSR con differenti frequenze di trasmissione dei pacchetti beacon (RLS) ne è presente solo uno che il loro risultato è sempre uguale. Ciò è dovuto al fatto che il flooding per il servizio di localizzazione si fa carico delle informazioni dei pacchetti di beacon tra il nodo mittente ed il nodo destinatario nel momento in cui ha inizio una comunicazione.
Inoltre i messaggi spediti tra i due nodi (che contengono i messaggi di beacon) durante la fase di comunicazione, sono usati anche per aggiornare le informazioni dei vicini.
Come prevedibile, la quantità di pacchetti spediti utilizzando il DSR diminuisce all'aumentare della distanza. Ciò è dovuto al fatto che DSR ha bisogno di mantenere le rotte a partire dal nodo mittente sino al nodo destinatario, operazione che risulta sempre meno banale all'aumentare della lunghezza dei percorsi.
L'approccio Position Based (GPSR) ottiene sempre come risultato il 100% di consegna per tutte le distanze. Questa totalità di consegne può essere spiegata attraverso le proprietà che tale approccio possiede. I pacchetti vengono considerati persi solo in questi tre casi:
• Se è stato raggiunto il massimo locale.
• Se le informazioni sul vicinato di un nodo non sono accurate (fatto altamente improbabile dato che i pacchetti utilizzati dal servizio di localizzazione per l'individuazione del vicinato di un nodo contengono anche i pacchetti di beacon, i quali, offrono informazioni dettagliate sulla posizione dei vicini). • Se le informazioni della posizione del nodo destinatario non è accurata.
Anche questo caso è abbastanza raro perché il MAC di tipo 0-MAC risponde periodicamente al mittente comunicando la sua posizione.
Un altro studio non ancora effettuato in letteratura ma comunque necessario per stabilire la bontà relativa di questi due protocolli è la dimensione del payload per ogni messaggio. Infatti, ci si interroga quale sia la dimensione ottimale che un pacchetto debba avere per entrambi i protocolli affinché si abbia la massima quantità di informazioni inviabili per ogni pacchetto e come questa dimensione incida sulle prestazioni in generale.
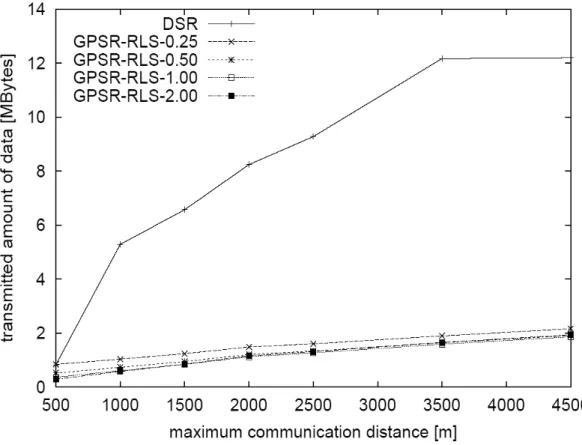
di trasmissione che si è ottenuto nell'intera simulazione dei protocolli DSR e GPSR, considerando anche le varie frequenze di invio dei pacchetti di beacon.
Dal grafico in figura 5.8 si nota che per il protocollo DSR il valore delle trasmissione è basso se la distanza massima di comunicazione è ridotta, mentre questo aumenta velocemente al crescere della distanza. Tale comportamento è dovuto all'incremento di overhead causato dalle creazioni e mantenimento dei percorsi.
Il protocollo GPSR-RLS invece assume inizialmente un valore alto, ma il suo tasso di incremento è molto più lento. Inoltre, l'incremento di overhead di rete cresce in maniera lineare con le frequenze dei pacchetti di beacon. Questo è dovuto alla diretta dominanza (in termini numerici) delle comunicazioni singolo hop che caratterizzano la classe dei protocolli di routing position-based.
Dato che la ratio di consegna dei pacchetti è quasi del tutto indipendente dalla frequenza dei beacon e dato che i pacchetti di beacon costituiscono la maggior parte dei pacchetti nelle comunicazioni singolo hop, nelle VANET è più appropriato utilizzare frequenze di trasmissioni basse quando in caso di utilizzo del GPSR. In
Figura 5.8: Nel Grafico viene mostrato il rapporto tra il numero delle trasmissioni dei veicoli e la
figura 5.9 è mostrata la quantità di dati usati nelle trasmissioni ad hop singolo.
Dalla figura 5.9 si nota che in tutti i test il protocollo DSR necessita di un numero maggiore di dati rispetto al GPRS. Ciò è dovuto alla dimensione dei pacchetti che servono per il mantenimento delle rotte, le quali, aumentando di lunghezza, richiedono pacchetti sempre più carichi di dati.
Per quanto riguarda invece GPSR-RLS, la dimensione dei pacchetti è alquanto limitata. Le informazioni richieste in questo approccio sono solamente l'id del mittente e la sua posizione.
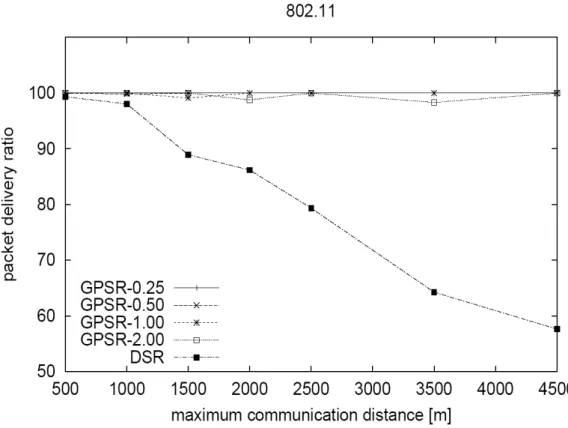
5.2.5.2 Simulazione con utilizzo del MAC IEEE 802.11
Utilizzando il MAC 802.11, i risultati che si ottengono con il protocollo GPSR-RLS risultano essere peggiori di quelli ottenuti dal DSR, ciò è dovuto al fatto che
l'anello di diffusione dei pacchetti (il flooding) in questo MAC è di tipo esponenziale cosa che non fa raggiunge tutti i nodi in una comunicazione. Il non raggiungimento della totalità dei nodi è dovuta alla tendenza dei pacchetti di flooding a sincronizzarsi tra loro causando così collisioni a livello MAC. Infatti, a questo livello, i pacchetti di broadcast affetti da collisioni non vengono ritrasmessi pertanto il broadcast sincronizzato può deteriorare i risultati delle comunicazioni e creare confusioni nell'espansione dell'anello di ricerca dei nodi.
In figura 5.10 è mostrato un grafico che mostra la capacità di consegna dei pacchetti se si usa il MAC 802.11.
Il risultato finale è molto simile a quello ottenuto se si usa il 0-MAC. Bisogna però osservare che in alcune simulazioni nel protocollo GPSR-RLS, si sono avute delle perdite di dati dovute a collisioni di pacchetti di beacon e pacchetti di broadcast. Si è inoltre notato che l'accuratezza della precisione dei vicini nel MAC 802.11 è inferiore a quella del 0-MAC. Quest'ultimo può causare il mancato
Figura 5.10: capacità di consegna dei pacchetti dei protocolli GPSR e DRS utilizzando il MAC
riconoscimento della posizione di un nodo lungo la direzione dello spostamento del pacchetto.
5.3 CONFRONTI TRA VARI PROTOCOLLI
In letteratura esistono diversi studi e confronti dei vari protocolli di routing ad esempio nello studio [4] vengono studiate le prestazioni dei protocolli SPF, DSDV, TORA, EXBF, AODV e DSR in varie situazioni. Il simulatore impiegato è il MaRS (Maryland Routing Simulator)[64].
Il MaRS è uno strumento sviluppato apposta per lo studio dei protocolli di rete, utilizzato tra l'altro per le valutazioni di protocolli di routing di tipo link-state e distance-vector per le reti NSFNET backbone di tipo T1 con possibilità di errori di link [63].
Nelle simulazioni effettuate, i nodi possono muoversi lungo un'area circolare in base a dei modelli di mobilità prestabiliti. Ogni nodo ha un raggio di trasmissione fissato. Se un nodo è al di fuori del raggio di azione di un altro, la distanza da questo, viene considerata infinita. Ogni nodo viene visto come una stazione di memorizzazione e di inoltro di pacchetti, inoltre, possiede dei parametri come la dimensione del buffer per la memorizzazione dei dati da inoltrare e la velocità di calcolo.
Un link invece è caratterizzato dalla banda offerta e dal ritardo di propagazione del segnale. Non vengono considerati in dettaglio il layer fisico e il canale radio.
I pacchetti di routing sono distinti dai pacchetti utilizzati per il mantenimento delle rotte. I nodi inoltrano i messaggi ai nodi successivi in base alle informazioni di routing da loro posseduti. Se esistono problemi su un cammino successivo o se non ci sono informazioni disponibili, i messaggi vengono cancellati a ritroso nella catena dei nodi attraversati, fino a quando un qualche nodo che possiede informazioni a sufficienza per il raggiungimento della destinazione diventa disponibile.
Le reti mobili hanno la capacità di determinazione il cambiamento dei link e la capacità di individuare il fallimento nella comunicazione di tra essi. Questa operazione viene effettuata tramite i messaggi hello.
5.3.1 Parametri di simulazione
I parametri di simulazione adottati in questi test sono i seguenti:
• Banda del canale di comunicazione di 1.5Mbit al secondo: questa capacità è abbastanza realistica paragonabili alle reti wireless che utilizzano MAC di tipo 802.11[66].
• Accessi multipli o le contese non sono modellate: inoltre le poche contese tra i nodi fanno si che ogni link può prendere l'intera banda mentre trasmette i pacchetti.
• Pacchetti di tipo unicast e broadcast: Nel modello di simulazione un pacchetto può essere unicast (ossia ricevuto solo da uno specifico vicino) broadcast (ricevuto da tutti vicini). Le trasmissioni broadcast sono modellate come a una sequenza di trasmissioni unicast. I pacchetti contenenti i dati sono invece sempre di tipo unicast.
• Capacità di buffer dei nodi adeguata: si assume che tutti i nodi hanno una adeguata capacità di buffer per la memorizzazione dei pacchetti che inoltreranno ad altri nodi.
• Tempo di calcolo dei pacchetti costante per ogni pacchetto
• Il raggio di azione limitato: Il raggio di azione delle comunicazioni dei nodi è di 350 m.
• mobilità dei nodi: i nodi possono muoversi lungo una regione rettangolare di lato 1000m×1000m
• Tutte le simulazioni durano 10000 secondi
• Utilizzo di un workload semplice: Tutti i pacchetti hanno dimensione di 512 byte, i tempi di interrarivo sono esponenziali. Non esistono sistemi di ack, flusso, o controllo di congestione nel modello. Il numero di coppie di nodi comunicanti varia nelle diverse simulazioni.
Per quanto riguarda la mobilità, i nodi sono costantemente in movimento in modo da stressare i protocolli di routing. Ogni nodo sceglie una direzione utilizzando distribuzioni predefinite. Un nodo prima di effettuare spostamenti, calcola i suoi vicini e poi si sposta, in modo da creare fallimenti di comunicazione tra nodi. La
velocità di spostamento è uniformemente distribuita con variazione da (0.4 -0.6 m/sec) per una bassa mobilità e (3.5-4.5 m/sec) per un'alta mobilità.
5.3.2 Risultati delle simulazioni
Negli studi effettuati in [4] sono stati simulati prima 30 e poi 60 e nodi mobili. Tutti i protocolli sono stati studiati in base a tre metriche di performance:
• Frazione dei pacchetti consegnati: misurazione della ratio del numero dei
pacchetti consegnati al destinatario e il numero di pacchetti inviati dal mittente.
I pacchetti data possono essere cancellati per due motivi: perché i link al prossimo nodo non è più valido o perché non esistono informazioni all'interno delle cache dei nodi per poter giungere al nodo destinazione. • Ritardo per nodo: viene misurato il ritardo in termini di ms sia per
l'inserimento in coda dei messaggi sia calcolo dei dati.
• Carico di routing: questo parametro misura il carico dei pacchetti di routing
necessari affinché un pacchetto contenente dati viene trasmesso.
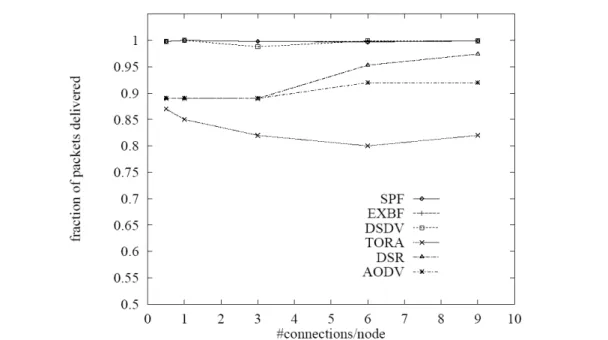
Nel figure 5.11 e 5.12 è rappresentata la frazione di pacchetti consegnati per ogni protocollo considerando una lenta mobilità dei nodi.
In figura 5.13 e in figura 5.14 è invece rappresentata la frazione di pacchetti consegnati da ogni protocollo considerando una veloce mobilità dei nodi.
Figura 5.12: Frazione di pacchetti consegnati con tutti i protocolli in una rete mobile a mobilità
bassa, formata da 60 nodi.
Figura 5.13: Frazione di pacchetti consegnati con tutti i protocolli in una rete mobile con
Da notare l'eccellente comportamento dei protocolli di tipo link-state e distance-vector a discapito della bassa consegna di pacchetti per i protocolli di tipo on-demand come ad esempio il protocollo TORA.
I protocolli on-demand (DSR e AODV) perdono un numero considerevole di pacchetti durante la fase di ricerca dei vicini, è l'acquisizione delle rotte richiede un tempo proporzionale alla distanza che intercorre tra l'origine e la destinazione dei messaggi. La situazione è simile con TORA. La perdita di pacchetti è inferiore nei protocolli di tipo Proactive dato che possono essere assegnate rotte alternative in caso di errore. Nel protocollo SPF una rotta alternativa viene assegnata dai nodi in base alla loro visione dei link verso i propri vicini. Nei protocolli EXBF e DSDV una rotta alternativa viene creata attraverso la scelta di un nuovo vicino.
Nei protocolli DSR e AODV invece, non sono disponibili alternative dunque i pacchetti vengono persi sino a quando una nuova rotta non viene ristabilita.
Figura 514: Frazione di pacchetti consegnati con tutti i protocolli in una rete mobile a mobilità
I link (wireless) nel protocollo TORA hanno il senso di direzione della comunicazione. A causa dell'implementazione asincrona e distribuita del protocollo possono sussistere inconsistenze a breve durata per quanto riguarda la direzione dei link percepiti. Se la rete è congestionata e il ritardo nell'accodamento dei pacchetti delle trasmissioni da parte dei nodi intermedi è alto, questa inconsistenza può perdurare causando ritardi e perdite di pacchetti. TORA comunque risulta essere poco sensibile alla perdita di pacchetti se paragonata agli altri protocolli.
La perdita di certi tipi di pacchetti di routing può causare la diffusione in avanti di inconsistenze di routing verso altri nodi, questo può richiedere del tempo per ripristinare e correggere il problema.
Come detto nel capitolo 4, in TORA[73] possono essere effettuate diverse migliorie. Se ad esempio TORA utilizzasse un protocollo di incapsulamento chiamato IMEP[65] allora otterrebbe una maggiore affidabilità nella consegna dei pacchetti.
Un'ulteriore ottimizzazione può essere la bufferizzazione dei pacchetti in arrivo da parte dei nodi nella fase di route discovery. L'utilizzo dei buffer migliora notevolmente le prestazioni dei protocolli DSR, AODV e TORA.
Per quanto riguarda il protocollo AODV è possibile fare un'ulteriore ottimizzazione a questo protocollo attraverso la conoscenza e quindi lo sfruttando dei nodi intermedi (i nodi che hanno all'interno delle loro cache un percorso valido per arrivare al nodo destinazione di un messaggio) facendo rispondere a tali nodi ai messaggi di request inviati dai vari mittenti. La performance di AODV risulta essere inferiore a quella del protocollo DSR, questo a causa dell'alto numero di pacchetti per persi. AODV usa la tecnica della route expiry per la cancellazione di alcuni pacchetti quando un cammino non è più valido. In presenza di route expiry è necessario ristabilire una nuova rotta valida, operazione che aumenta ulteriormente il numero delle perdite dei messaggi.
Il ritardo medio tra i nodi per entrambe le reti e per entrambi tipi di mobilità è rappresentato nei grafici delle figure 5.15, 5.16, 5.17, 5.18.
Figura 5.15: Ritardo medio nei nodi di tutti i protocolli in una rete formata da 30 nodi in caso di
bassa mobilità dei nodi.
Figura 5.16:Ritardo medio nei nodi di tutti i protocolli in una rete formata da 30 nodi in caso di alta
Figura 5.18: Ritardo medio nei nodi di tutti i protocolli in una rete formata da 60 nodi in caso di alta
mobilità dei nodi
Figura 5.17: Ritardo medio nei nodi di tutti i protocolli in una rete formata da 60 nodi in caso di
I protocolli di tipo Shortest Path (SPF, EXBF e DSDV) offrono i ritardi minimi. AODV e DSR invece (non avendo la proprietà di Shortest Path) hanno ritardi maggiori. Infatti, se inizialmente la fase di ricerca del percorso dal mittente al destinatario restituisce il percorso più breve, tale proprietà non viene assicurata nel tempo a causa della mobilità dei nodi. Le rotte nel protocollo AODV vengono mantenute attive per periodi di tempo limitati, al trascorrere di esso, le rotte e vengono invalidate e viene attivata la procedura di ricerca dei percorsi. Per migliorare le performance a AODV ad esempio, bisogna effettuare alcuni accorgimenti sulla scelta del tempo di timeout. TORA fornisce il peggior ritardo a causa della perdita di informazioni sulla distanza tra i vari nodi.
Il carico di routing viene mostrato nei grafici delle figure 5.19, 5.20, 5.21 e 5.22. Da notare che il carico di routing ha un intervallo di variazione molto ampio quindi, nel grafico viene utilizzata una scala logaritmica per l'asse verticale.
Dai grafici riportati dalle 5.19, 5.20, 5.21 e 5.22 si nota che SPF ha un carico di routing maggiore rispetto agli altri protocolli. I protocolli di tipo Distance-Vector EXBF e DSDV hanno un carico di routing simile comunque molto inferiori rispetto ad SPF. DSR e AODV offrono risultati molto buoni in special modo se vi sono poche connessioni. In generale però, DSR ottiene prestazioni migliori di AODV.
Il basso carico di routing nel DSR è dovuto alle ottimizzazioni che sono possibili in questo protocollo.
La performance di TORA mostrano la non competitività di tale protocollo se paragonati a quelli di tipo Distance-Vector e Reactive On-Demand. Il partizionamento che si forma nella rete in TORA crea un maggiore lavoro per il congelamento delle rotte quando queste non sono più in uso.
In genere, tutti i protocolli ricevono benefici se le connessioni tra i nodi aumentano, questo perché le rotte possono essere utilizzate anche da più connessioni. Proprio per quest'ultimo motivo il carico di routing non aumenta alla stessa maniera di come aumenta il carico dei dati al crescere del numero delle connessioni.
Il protocollo DSR infine, a causa del funzionamento, utilizza una banda del 10-20% per l'aumento delle dimensioni dell'header dei pacchetti. In genere DSR è abbastanza competitivo, ma se si avesse una forte crescita del numero dei nodi, DSR potrebbe non fornire più risultati accettabili.
In seguito vengono riportati i risultati due test del carico di routing ottenuti dalle simulazioni considerando 30 nodi con bassa mobilità in figura 5.19 e con alta mobilità in figura 5.20. Le figure 5.21 e 5.22 invece mostrano il carico di routing dei protocolli in una rete formata da 60 nodi con bassa e poi con alta mobilità.
Figura 5.20: Carico di routing normalizzato di tutti i protocolli, in una rete formata da 30 nodi in
caso di alta mobilità
Figura 5.19: Carico di routing normalizzato di tutti i protocolli, in una rete formata da 30 nodi in
Figura 5.21: Carico di routing normalizzato di tutti i protocolli, in una rete formata da 60 nodi in
caso di bassa mobilità
Figura 22: Carico di routing normalizzato di tutti i protocolli, in una rete formata da 60 nodi in caso
5.4 SOMMARIO E CONSIDERAZIONI
Nei prossimi paragrafi verranno discusse le conclusioni sui vari protocolli in base ai test effettuati e ai risultati riportati dalle varie simulazioni.
5.4.1 Conclusioni confronto tra: GPSR DSR
Dai risultati riportati è evidente che l'approccio Position Based rivela interessanti prospettive se applicato alla tecnologia VANET. L'approccio Position Based fornisce un alto rate di consegna di messaggi anche in caso di moltihop ed inoltre l'overhead nelle trasmissioni a singolo hop ha una scalabilità maniera migliore rispetto a quella dell'approccio Reactive. Questa caratteristica è dovuta al fatto che il routing Position Based non necessita del mantenimento delle rotte dato che il forwarding dei pacchetti avviene “al volo”.
L'approccio Reactive come il DSR potrebbe essere migliorato se venissero considerati i movimenti dei singoli nodi nella decisione di routing. In questo caso si otterrebbero risultati nettamente migliori se applicati a veicoli che si spostano lungo la stessa direzione, riducendo così il numero dei cambiamenti della topologia della rete che in genere crea annullamenti di percorsi.
Potrebbe inoltre essere ottimizzato il servizio di localizzazione dei nodi attraverso l'uso di cache e predizioni sulla posizione futura dei nodi basati sulla direzione e velocità di spostamento.
Per finire, si potrebbero ottimizzare vari parametri sulla comunicazione, sia nell'approccio reactive che position-based. Esempi di parametri ottimizzabili possono essere il raggio d'azione delle comunicazioni a singolo hop, la frequenza di invio di pacchetti di routing o l'ottimizzazione delle strategie di broadcast.
5.4.2 Conclusioni confronti tra: SPF EXBF DSDV TORA DSR AODV
hanno eccellenti performance in termini di ritardo tra nodo e nodo e in termini di frazioni di pacchetti consegnati, però hanno un alto costo nel carico di routing.
I protocolli Reactive On-demand soffrono del non raggiungimento delle rotte e ottimali e del limitato numero di consegne dei messaggi a causa della cancellazione dei pacchetti mentre risultano essere efficienti nel carico di routing.
Come si vede dai grafici nelle figure 5.11, 5.12, 5.13, 5.14, il protocollo TORA pur essendo un protocollo multipath non ottiene i risultati sperati anche se fa uso di percorsi ridondanti.
In tutti i protocolli di routing in genere, si ha una riduzione del carico di routing se vi è un considerevole numero di conversazioni tra i vari nodi. La velocità di mobilità e la dimensione dei nodi sembrano non influenzare le varie prestazioni. I test effettuati però sono soggetti a delle limitazioni:
• Non è stato preso in considerazione e nessun MAC e non sono state considerate eventuali interferenze
• L'alto numero di pacchetti di routing non interferisce con i pacchetti contenenti i dati (che cosa che invece accade spesso nella realtà)
• Non si verificano errori nelle trasmissioni
• Non sono stati presi in considerazione ottimizzazioni possibili sui vari protocolli (vedi ottimizzazioni del DSR)
• Non è stato considerato l'impatto con l'utilizzo della memoria dei vari nodi nonché i ritardi di memorizzazione dei dati
Comunque, anche in presenza di tali limitazioni, lo studio è interessante per avere una prima idea delle reazioni e del comportamento generale dei vari protocolli.
5.5 CONCLUSIONI
I protocolli delle varie classi hanno delle caratteristiche diverse tra loro. Ad esempio i protocolli on demand hanno problemi nella costruzione dei percorsi, infatti, nella fase di ricerca dei vicini il tasso di perdita dei messaggi è alto, inoltre il
tempo di consegna dei messaggi da un nodo ad un altro è alto rispetto a quelli Proactive. Infatti i protocolli Proactive sfruttano i cammini minimi cosa che non viene fatta dai protocolli Reactive On demand. Di contro però i protocolli Proactive hanno un carico di routing maggiore rispetto a quelli Reactive On demand.
Anche l'approccio Position Based ha un alto tasso di consegna ma in più ha una buona scalabilità dell'overhead nelle trasmissioni singolo hop, caratteristica che rende tale approccio uno dei candidati favoriti per un'applicazione nelle reti VANET.