Capitolo 1
Il sistema satellitare G
PS
1.1 – Struttura del sistema
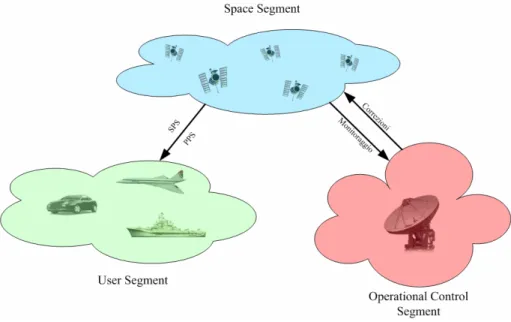
Il sistema GPS è formato da tre segmenti:
a) Space Segment (SS)
b) Operational Control Segment (OCS)
c) User Segment (US)
a) Lo Space Segment (SS) è costituito da una costellazione di 24
satelliti operativi, cui si affiancano 4 satelliti previsti per eventuali sostituzioni. I satelliti sono disposti, a gruppi di 4 o 5, su sei orbite centrate attorno alla Terra, con una disposizione tale da garantire i minimi effetti negativi in caso di mancato funzionamento di uno di questi.
Le orbite, di tipo ellittico, sono equispaziate tra loro e presentano un angolo di inclinazione di 55° ed un raggio approssimativo di 26,560 km (Fig. 1.1).
Come si evince dal raggio orbitale, i satelliti non sono di tipo geostazionario, ma hanno un tempo di rivoluzione attorno alla Terra pari alla metà del giorno siderale, equivalente a circa 11 ore e 58 minuti, con una velocità di 3874 m/sec ed un peso a terra di 2032.13 kg ed in orbita di circa 1075.03 kg.
Fig. 1. 1– Costellazione delle orbite dei satelliti GPS
Nel corso degli anni abbiamo assistito ad una evoluzione dei satelliti, a partire dal Block I fino ad arrivare ai più moderni Block IIR (Fig. 1.2).
Componenti fondamentali di ciascun satellite sono i quattro orologi atomici a bordo, due al Cesio e due al Rubidio, che garantiscono un errore inferiore al secondo per un periodo che va da 30,000 ad un milione di anni e che servono per la generazione dei segnali in trasmissione; tali orologi, infatti, danno luogo ad un oscillatore con una frequenza base di 10.23 MHz, da cui è possibile ricavare tutte le frequenze in gioco: oltre ai generatori di codice, a 10.23 Mbit/sec e 1.023 Mbit/sec, è possibile ottenere il clock a 50 Hz, dividendo l’oscillatore di riferimento per 204,600, e le frequenze portanti L1 e L2, moltiplicandolo rispettivamente per 154 e 120.
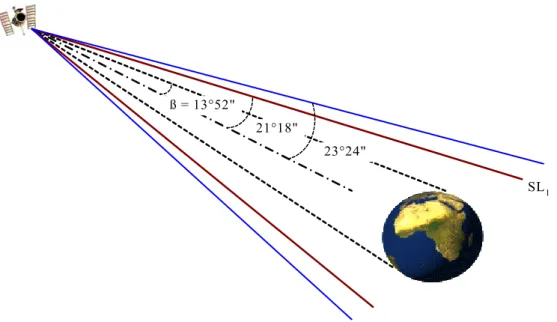
L’angolo di apertura dei trasmettitori satellitari è rispettivamente di 21°18" per il segnale L1 e di 23°24" per il segnale L2, ampiamente sufficiente
per la copertura della superficie terrestre, come si evince dalla Fig. 1.3.
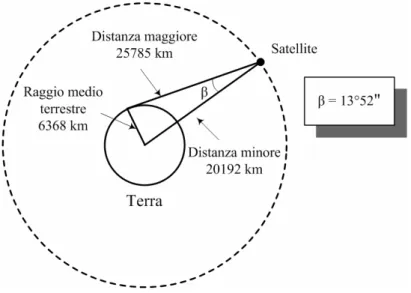
Considerando il raggio orbitale pari a 26,560 km ed il raggio medio terrestre pari a 6,368 km, applicando il teorema di Pitagora al triangolo formato dal raggio terrestre e dalle distanze calcolate tra il satellite e i punti a distanza minima e massima in cui esso è visibile, si ottiene un angolo massimo di apertura pari a 13°52".
Una ulteriore conseguenza della situazione riportata in Fig. 1.4 è la necessità di sagomare il diagramma di irradiazione in modo tale da rendere più uniforme possibile la potenza ricevuta sui vari punti della superficie terrestre, tenendo anche conto del non uniforme guadagno di antenna del ricevitore di terra rispetto all’angolo di elevazione.
Tipicamente, in accordo con le specifiche di sistema, la potenza in trasmissione è pari ad almeno 13.4 dBW, con un guadagno di antenna di circa 13.4 dBi, che assicurano un livello minimo di –160 dBW in ingresso al
ricevitore di uso civile (considerando inoltre le perdite dovute alla propagazione in spazio libero ed al disadattamento di polarizzazione).
ß = 13°52"
SL1 21°18"
23°24"
Fig. 1. 4 – Angoli di apertura dei trasmettitori satellitari
b) L’Operational Control Segment (OCS) ha il compito di
controllare e monitorare l’intero sistema GPS.
L’intera sezione è composta da una stazione di comando, la Master
Control Station (MCS), situata nella Falcon Air Force Base in Colorado, da
trasmittenti GA (Ground Antenna), controllate dall’organo statunitense DSCS
(Defense Satellite Communications System).
Tra le operazioni svolte dal Control Segment, le più importanti sono quelle di monitoraggio dello stato dei satelliti, del calcolo dei fattori orbitali e della trasmissione delle correzioni di tali parametri, ottenute avvalendosi di strumenti di misurazione e di calcolo notevolmente potenti e accurati.
c) Lo User Segment (US) è rappresentato da tutti gli utenti civili e
militari del sistema GPS. In questa trattazione ci occuperemo soltanto della
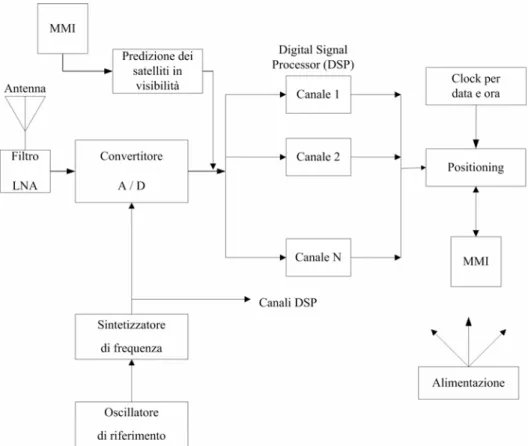
prima categoria di ricevitori, il cui schema generale è riportato in Fig. 1.5.
Fig. 1. 5 - Schema di principio di un generico ricevitore GPS per uso civile (SPS)
Tipicamente, l’antenna usata per ricevitori SPS (Standard Positioning Service) ha una polarizzazione circolare di tipo destrogiro (RHCP), con un
diagramma di irradiazione quasi semisferico, che consente un angolo di apertura di circa 160°, con un guadagno massimo (2.5 dBi) in corrispondenza
dello zenit: tali requisiti possono essere ottenuti con antenne a microstriscia. Lo stadio successivo del ricevitore è costituito dalla conversione digitale in banda base del segnale ricevuto; a questo punto, sulla base dell’algoritmo di predizione dei satelliti in visibilità, descritto in maniera approfondita più avanti, vengono generati a livello locale i codici PRN associati a ciascun
satellite ricevuto.
Realizzando una correlazione tra il segnale digitale ricevuto ed il codice locale, il ricevitore è in grado di separare i vari canali, corrispondenti ai diversi satelliti, dando luogo ad una prima fase di acquisizione rozza, cui seguirà una fase di tracking del segnale.
Una volta che il ricevitore si è sincronizzato con i dati di ciascun satellite, scatta la fase di Navigazione, nella quale vengono immagazzinati tutti i dati necessari alla fase di Positioning, che, dialogando con la Man-Machine
Interface (MMI), fornisce una stima della posizione dell’utente sulla superficie
terrestre.
La Fig. 1.6 mostra uno schema generale della struttura del sistema GPS,
visto nei suoi principali segmenti.
1.2 – Principi di funzionamento
Il sistema GPS è un sistema di posizionamento satellitare che consente
una misura della posizione dell’utente nelle tre coordinate spaziali (latitudine, longitudine e altitudine) e del tempo UTC (Universal Coordinated Time) con
una copertura globale e continua e con un grado di accuratezza che varia a seconda del tipo di utenti.
Sono previste, infatti, due classi di utenza: gli utenti militari, che fruiscono del Precise Positioning Service (PPS), e gli utenti civili, che sfruttano
lo Standard Positioning Service (SPS).
Fig. 1. 6 - Organizzazione del sistema GPS nei tre segmenti
Il sistema, per come è stato strutturato, non prevede alcuna limitazione al numero di utenti: i ricevitori (User Segment, US), infatti, operano in maniera
passiva, decodificando i messaggi che vengono trasmessi in modalità
broadcast dai satelliti che compongono lo Space Segment (SS), i quali vengono
monitorati costantemente dall’Operational Control Segment (OCS).
Il concetto su cui si basa il funzionamento del GPS è lo stesso che venne
impiegato, per la prima volta sfruttando segnali radio, dal sistema di radionavigazione marino LORAN (LOng Range Aid to Navigation), usato
durante la II Guerra Mondiale.
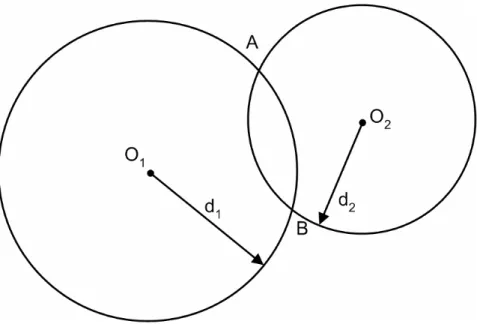
Tale meccanismo è pero noto ai navigatori fin dal tardo Medio Evo e può essere illustrato attraverso un esempio analogo per le due dimensioni (Fig. 1.7), riportato in [3].
Fig. 1. 7 - Misura della posizione mediante due sirene da nebbia
Supponendo di conoscere i centri O1 e O2 ed i raggi d1 e d2 di due cerchi,
è possibile risalire ai due soli punti di intersezione tra questi, A e B; se si dispone poi di informazioni aggiuntive che consentono di escludere uno dei due, è allora noto l’unico punto a comune. Questa situazione può essere applicata ad un contesto solo apparentemente distante: supponiamo il caso di un marinaio che intenda stabilire la propria posizione calcolando il tempo in cui percepisce il fischio emesso da due sirene da nebbia; supponendo che conosca la posizione esatta delle due sirene (O1 e O2) e che sia perfettamente
sincronizzato con esse, e che queste siano a loro volta sincronizzate tra loro, è poi in grado di risalire alle distanze d1 e d2 moltiplicando i tempi di
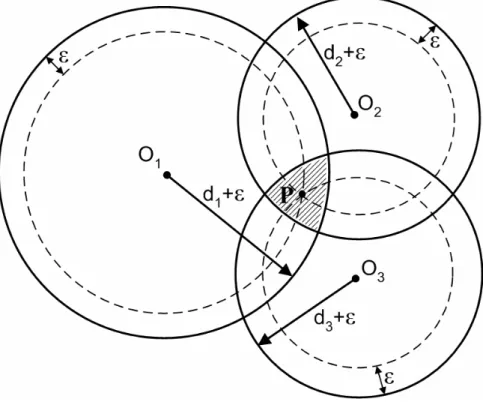
propagazione dei segnali emessi per la velocità di propagazione del suono. Eliminando l’ipotesi assai poco plausibile che il marinaio sia sincronizzato con le due sirene da nebbia, i tempi di arrivo risultano affetti da un errore ε, che, ritenendo ancora valida l’ipotesi che il sistema sia sincronizzato, risulta essere uguale per entrambi: in questa situazione (Fig 1.8), per la risoluzione del problema occorre una terza sirena, che serve a confinare
le possibili posizioni del marinaio entro la zona tratteggiata. Applicando un algoritmo iterativo che tenga conto di questo errore ε, è possibile eliminare l’incertezza ed ottenere la posizione effettiva P.
Fig. 1. 8 - Misura della posizione con errore di sincronizzazione
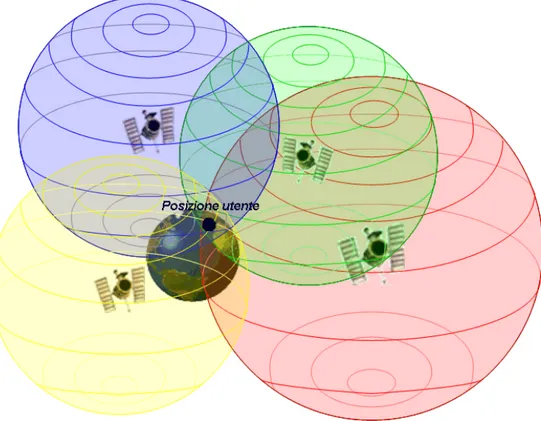
Estendendo l’esempio alle tre dimensioni, il concetto di cerchio si traduce in quello di sfera: a questo punto, si rende necessario l’impiego di quattro sfere per misurare latitudine, longitudine, altitudine e tempo, come illustrato in Fig 1.9.
Nel nostro caso, il centro di ciascuna sfera è rappresentato dalla posizione di ogni satellite ricevuto, che può essere ottenuta mediante i dati relativi alle effemeridi trasmesse dal satellite stesso, mentre il raggio è calcolato misurando i tempi di interarrivo dei segnali e moltiplicandoli per la velocità della luce.