In questo capitolo vengono descritti componenti e movimenti del sistema di masticazione artificiale, assemblato presso il Centro Piaggio nell’ambito delle tesi [12] e [13], per il quale è stato progettato e realizzato il circuito di controllo e acquisizione dei segnali prelevati dai denti sensorizzati in seguito all’azione di un carico masticatorio.
2.1 Componenti del sistema
Gli elementi principali che compongono il sistema di masticazione sono i seguenti: • Telaio • Mascella • Mandibola • Silentblock • Pistone • Lamine • Strain gage
Il telaio del sistema è formato da tre piastre d’acciaio: una di base e due laterali. Queste ultime sono fissate alla prima tramite un collegamento mobile costituito da tre viti e due perni di riferimento per ogni piastra. Le dimensioni del telaio
Capitolo 2 – Il sistema di masticazione artificiale 16
determinano l’ingombro totale della struttura: 300x300x400 mm.
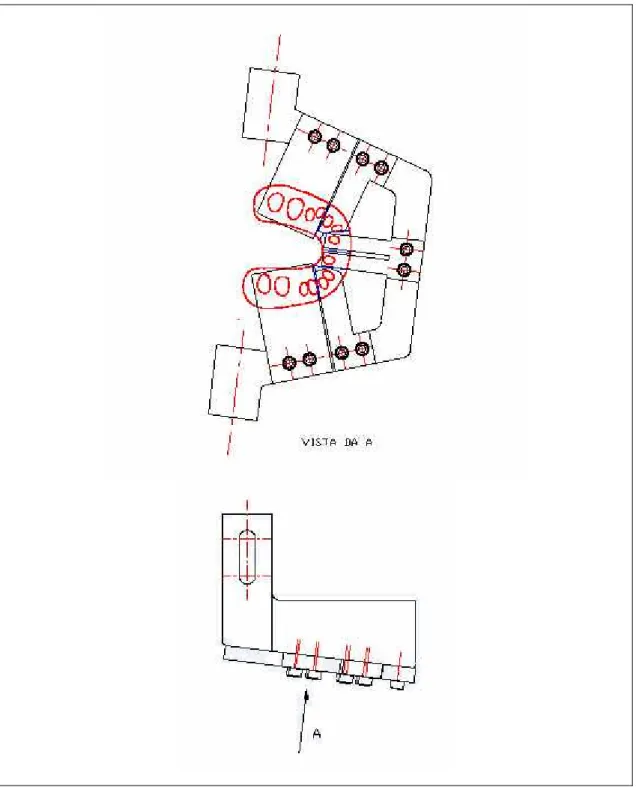
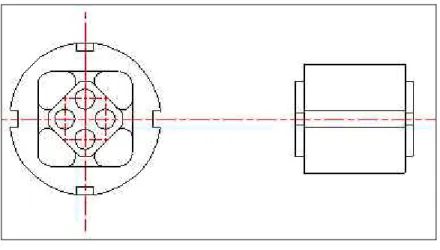
La mascella (fig. 2.1) è costituita da una struttura in acciaio fissata in modo solidale al telaio tramite quattro viti (due per lato). La mandibola (fig. 2.2), anch’essa in acciaio, è collegata al telaio per mezzo di due silentblock (uno per lato) di tipo DK-A, che ne consentono il movimento. Questi oggetti, la cui proiezione su due piani è rappresentata in figura 2.3, sono stati scelti in base a tre specifiche: l’angolo di rotazione dovuto alle forze torsionali, l’angolo di rotazione cardanico e la frequenza del ciclo di masticazione, fissati rispettivamente a 20°, 1° e 0.8 Hz. Ogni silentblock ha la propria parte interna collegata alla mandibola tramite due viti, mentre la parte esterna è posta sul telaio, al quale sono fissati radialmente mediante una linguetta. È presente anche una piastra che ne impedisce lo spostamento assiale.
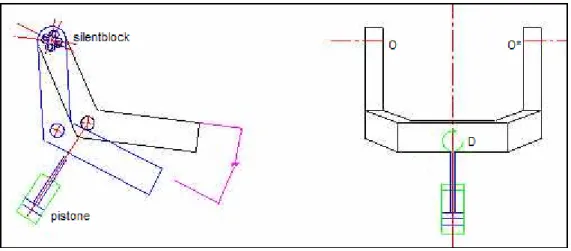
Alla struttura, inoltre, è applicato un pistone mediante il quale viene effettuata la rotazione della mandibola intorno all’asse O-O* (vedi figura 2.5). Il pistone deve essere in grado di fornire una spinta pari alla forza che si oppone alla chiusura della mandibola, sviluppata dal carico masticatorio e dal peso della mandibola stessa. I valori dei carichi sui vari punti della mandibola sono rappresentati in figura 2.4. In base a questi, è stato calcolato dal progettista meccanico il valore della forza che il pistone deve esercitare in 747.84 N [12]. Basandosi su questa specifica, come pistone è stato scelto il NORGREN RT/57232/M/50, che è in grado di fornire una forza massima di 804 N con una pressione di esercizio di 10 bar.
Sia sulla mascella che sulla mandibola sono montate, tramite viti, delle lamine, sulle quali è fissata una protesi dentaria costituita da denti immersi in una resina rigida che funge da gengiva. L’applicazione di un carico su uno o più denti ne causa una piccola traslazione verticale, provocando una deformazione della lamina sottostante. Su alcune di queste sono montati degli strain gages del tipo EA-06-125BT della Vishay Measurements, che costituiscono l’elemento sensoriale del sistema: deformandosi in modo solidale alla lamina, permettono di rilevare la forza del carico agente sui denti (vedi capitolo successivo).
Figura 2.1: mascella del sistema di masticazione artificiale1.
È stato previsto che questi ultimi fossero sensorizzati alternativamente nell’arcata
1
Capitolo 2 – Il sistema di masticazione artificiale 18
superiore (o mascellare) e in quella inferiore (o mandibolare). Quelli per i quali non è prevista la sensorizzazione sono montati su lamine più larghe e rigide, che pertanto subiscono, in seguito all’applicazione di un carico, una deformazione non significativa. In questo modo viene fornito un contrasto rigido ai denti sensorizzati, senza il quale la sollecitazione si distribuirebbe sulle due arcate in proporzioni variabili, disturbando la corretta acquisizione dei segnali.
Figura 2.3: silentblock.
Nell’arcata superiore sono state previste quattro lamine sensorizzabili: due per gli incisivi centrali e altre due collegate ognuna ad un incisivo e un canino. Sono presenti, inoltre, altre due lamine rigide, una per lato, alle quali sono fissati i premolari e i molari (vedi fig. 2.1).
Nell’arcata inferiore, come già accennato, la disposizione dei sensori è invertita rispetto a quella superiore: si hanno otto lamine sensorizzabili, ognuna fissata ad un molare o un premolare, mentre un’unica lamina centrale rigida sostiene gli incisivi e i canini (vedi fig. 2.2).
Allo stato attuale, gli strain gage sono stati montati solo nell’arcata mandibolare. In particolare, ve ne sono due per ognuna delle otto lamine sensorizzate: uno fissato sulla faccia superiore, l’altro su quella inferiore.
Capitolo 2 – Il sistema di masticazione artificiale 20
2.2 Movimenti eseguiti dal sistema
Il sistema artificiale, pur con significative semplificazioni, riesce a riprodurre le traiettorie mandibolari essenziali della masticazione umana. Il movimento principale consiste in una rotazione della mandibola, fino ad un massimo di 20°, attorno all’asse O-O* (figura 2.5), realizzata tramite il pistone. In caso di presenza di cibo in posizione eccentrica si ha poi un’altra rotazione, indicata con la lettera D nella figura 2.4, che avviene per mezzo di una deformazione della struttura dovuta alla presenza dei due silentblock.
In pratica, quello che avviene è un moto di apertura e chiusura della mandibola, con una minima componente di lateralità in caso di presenza di cibo, pertanto il sistema riproduce i movimenti della mandibola umana in modo molto semplificato. Le lamine sensorizzate possono essere considerate una replica molto semplificata del legamento parodontale, in cui, come visto nel capitolo precedente, si trovano recettori in grado di rilevare i carichi agenti sui denti. Una replica di altri tipi di sensori, come i fusi neuromuscolari, necessiterebe l’integrazione di altri elementi, come un sistema di propriocezione e attuazione artificiali, che al Centro “E. Piaggio” sono in fase di sviluppo.
Figura 2.5: movimenti realizzati dal sistema di masticazione artificiale. Il pistone comanda la rotazione attorno all’asse O-O*, che avviene grazie all’incernieramento della mandibola alla struttura mediante i due silentblock. Questi ultimi consentono anche la rotazione D del sistema, che si ha in caso di presenza di cibo in posizione eccentrica.
Nel complesso, il sistema replica la masticazione umana in modo sufficientemente fedele da consentire un’acquisizione efficiente ed organica di segnali in corrispondenza della presenza di cibo, ed in base a questi controllare il sistema.
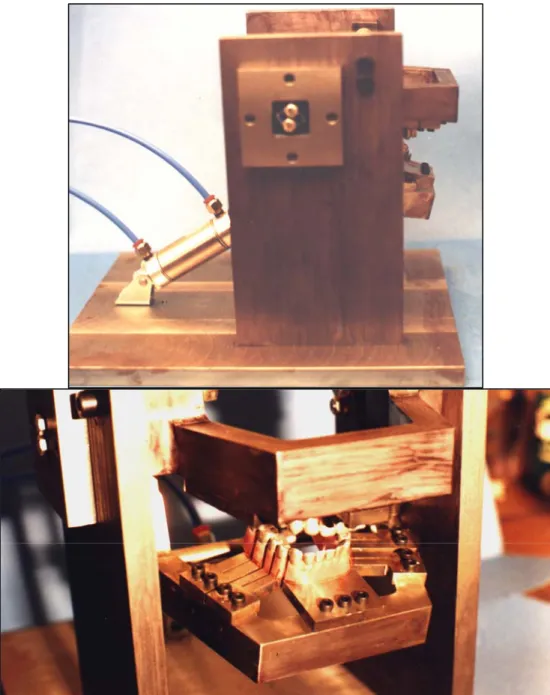
Di seguito sono mostrate alcune foto del sistema di masticazione.
Figura 2.6: il sistema di masticazione artificiale. Sopra sono evidenti due silentblock e il pistone, sotto la mandibola con le lamine e la protesi dentaria.