2 STATO DELL’ARTE
2.1 Panoramica sui simulatori
Per simulatore si intende, in generale, una apparecchiatura mediante la quale possono venir riprodotte (simulate) virtualmente le condizioni reali nelle quali un certo fenomeno si verifica. La simulazione è utilizzata in molti campi della scienza e della tecnica quando vi è la necessità di replicare virtualmente un particolare fenomeno fisico.
Uno dei settori in cui i simulatori trovano più largo impiego è quello dell’intrattenimento (fig. 2-1). Gli esempi più comuni sono quelli dei videogames che troviamo nelle sala giochi, oppure dei simulatori su piattaforma di movimento che vengono installati nei luna park. Con essi si cerca di far rivivere all’utente le stesse sensazioni che proverebbe ad essere, per esempio, al volante di un’auto da F1, di un aereo da combattimento oppure a percepire le emozioni trasmesse da un “ottovolante”.
Fig. 2-1, Esempio di un simulatore per intrattenimento.
Un altro utilizzo del simulatore, è quello per test di veicoli (fig. 2-2). L’esempio più comune in questo ambito è quello adottato da molte case automobilistiche, le quali fanno ricorso alla simulazione per ricavare dati, informazioni e parametri nella fase di avamprogetto del veicolo stesso. In questa fase il veicolo viene posizionato su una piattaforma di movimento la quale ha il compito di riprodurre le azioni dinamiche provocate sul veicolo stesso dalle operazioni di guida da parte dell’utente. Infatti i comandi primari che regolano il comportamento del veicolo come sterzo, pedaliera e cambio sono opportunamente adattati e previsti di sensori i quali hanno il compito di permettere la retroazione del segnale provocato dalle manovre di guida e produrre il conseguente movimento degli attuatori della piattaforma. In questo modo, riproducendo le azioni dinamiche sul veicolo si cerca quindi di migliorarne le qualità in termini di prestazioni, sicurezza o ergonomia dell’abitacolo e di ridurre i costi ed il numero di prototipi costruiti. Un utilizzo comune in fase di test è anche quello di verifica delle caratteristiche di comfort del veicolo stesso. In questo caso, posizionato il veicolo su una piattaforma di movimento, viene fatto salire l’utente all’interno dell’abitacolo e vengono poi simulate una o più situazioni di marcia andando poi a monitorare le reazioni dinamiche percepite dall’utente.
In questo modo è possibile giungere all’ottimizzazione dei sistemi di sospensione e di tutto ciò che riguarda il comfort del veicolo stesso.
Fig. 2-2, Simulatore per test di veicoli.
L’utilizzo del simulatore forse più diffuso e conosciuto è quello per l’addestramento alla guida del personale (fig. 2-3). Di questo ambito fanno parte i simulatori di volo utilizzati da molti corpi dell’aeronautica militare e da molte compagnie aeree, i simulatori ferroviari e in generale tutti i simulatori di veicoli terrestri.
Addestrare un pilota utilizzando un simulatore anziché il veicolo o velivolo reale porta a vantaggi notevoli soprattutto per quanto riguarda l’abbattimento dei rischi per il personale poiché consente di far acquisire ottima esperienza di guida senza pregiudicare l’incolumità del pilota o di terzi e l’integrità dei mezzi reali. Inoltre produce vantaggi anche dal punto di vista economico perché consente l’abbattimento dei costi, sia relativi all’utilizzo dei mezzi reali (basti pensare a quanto può essere oneroso l’utilizzo di un aereo per un addestramento di un pilota) sia degli alti costi che coprono l’operatore durante il periodo di addestramento.
Un terzo vantaggio che ha influito in maniera determinante sulla crescita vertiginosa dell’utilizzo della simulazione in questo ambito è stato il progresso tecnologico che ha reso i simulatori maggiormente fruibili abbattendo i costi di acquisto e d’installazione dei propri componenti, consentendo così l’utilizzo in campi diversi da quelli aerospaziali che, vista la disponibilità economica praticamente illimitata, erano stati i primi ad adottare la simulazione per scopi di ricerca.
Fig. 2-3, Simulatore per addestramento alla guida del personale.
Due eventi, in particolare, hanno favorito lo sviluppo dei simulatori di guida: il primo è stato l’avvento dei calcolatori digitali, i quali hanno consentito un preciso controllo del fenomeno basato sulle equazioni della dinamica del moto, il secondo è stato il rapido sviluppo della grafica digitale che ha permesso una riproduzione altamente realistica di ciò che il pilota vede al comando del proprio veicolo. In essi, il personale da addestrare, immerso in ambiente virtuale, viene sottoposto alla percezione di segnali visivi, uditivi ed eventualmente a movimenti o sollecitazioni, riproducenti quelli che avvertirebbe a bordo dei veicoli reali. L’operatore, eseguendo le manovre di guida attraverso i comandi primari presenti all’interno dell’abitacolo (sterzo, pedaliera, cambio etc.), determina le azioni corrispondenti sul simulatore, il quale attraverso un software di controllo permette la retroazione dei segnali, consentendo un aggiornamento della grafica in tempo reale ed eventualmente la riproduzione sull’utente delle azioni dinamiche provocate da manovre dalle manovre di guida. Si tratta dunque di una struttura cosiddetta ad anello chiuso, in cui i segnali generati dalle azioni di guida provocano una reazione del simulatore e viceversa. I simulatori possono essere classificati in due grandi categorie :
¾ Simulatori statici.
2.1.1 I simulatori statici
Un simulatore, può essere definito statico se l’opera di simulazione è affidata essenzialmente a sistemi grafici e sonori senza far ricorso all’utilizzo di piattaforme di movimento e quindi senza far percepire all’utente movimenti o sollecitazioni che riproducono le reazioni dinamiche trasmesse dal veicolo nella realtà. In un simulatore statico non avviene quindi la generazione sull’utente del cosiddetto “feedback inerziale” il quale consente di replicare sull’utente accelerazioni, decelerazioni, forze centrifughe, che sono prodotte dalla dinamica del moto di un veicolo in movimento. Bisogna comunque puntualizzare che possono essere classificati tra gli statici anche quei simulatori dotati di sistemi per la generazione di vibrazioni poiché l’entità della sollecitazioni e degli spostamenti percepiti dall’ utente risultano nettamente inferiori a quelle riscontrate nei simulatori dinamici.
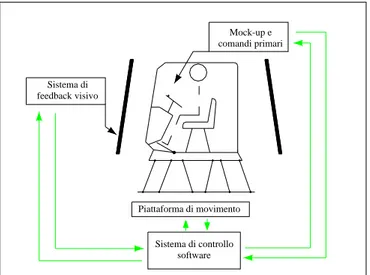
In generale, un simulatore di tipo statico, il cui schema è rappresentato in fig. 2-4, sarà costituito da:
• Un mock-up che riproduce in modo fedele l’abitacolo del veicolo da simulare. Questo perché la simulazione dell’ambiente che circonda l’utente è forse uno degli aspetti che maggiormente colpisce, ancor prima della accuratezza delle risposte ai comandi e alle manovre. Un buon simulatore deve per questo ricostruire completamente e in modo fedele l’abitacolo del veicolo reale.
• Comandi primari quali organi direzionali, eventuali pedaliere o cloches per la fase di accelerazione, frenatura o cambio di marcia; eventuali leve del cambio o altri leveraggi per operazioni secondarie non strettamente legate alla guida. I suddetti comandi possono eventualmente prevedere retroazione in forza, se necessaria.
• Sistemi di feedback visivo e sonoro, costituiti da sistemi immersivi di visualizzazione e di riproduzione audio, i quali permettono di ricreare immagini o suoni quanto più rappresentativi della realtà.
• Un ambiente virtuale il quale riproponga ciò che il pilota incontra o percepisce alla guida del veicolo come le caratteristiche che circondano il veicolo in marcia o gli eventuali oggetti o persone in movimento.
• Un software di controllo che permetta di monitorare le manovre di guida del pilota, effettuare una retroazione dei segnali provocati dalle manovre stesse con conseguente reazione da parte del simulatore.
Mock-up e comandi primari Sistema di feedback visivo Sistema di controllo software
Fig. 2-4, Schema della struttura di un simulatore statico.
L’utente, posizionato all’interno di un mock-up ed immerso nell’ambiente virtuale ricreato dalla grafica, esegue le manovre di guida agendo sui comandi primari che governano il comportamento del simulatore; questo determina le reazioni dello stesso, il quale attraverso organi di controllo grafico e sonoro aggiorna immagini e suoni in tempo reale, a seconda della manovra operata dall’utente ed a seconda della posizione del veicolo nell’ambiente virtuale.
In conclusione, si può affermare quindi che in un simulatore statico la simulazione è affidata essenzialmente al sistema di visualizzazione, il quale ha il compito di riprodurre in maniera più accurata possibile il mondo reale, ricorrendo alla stimolazione dell’utente per mezzo di segnali ottici e sonori.
2.1.2 I simulatori dinamici
Per realizzare una totale immersione dell’operatore nell’ambiente virtuale e rendere quindi la simulazione più realistica, oltre alla percezione dei segnali visivi ed uditivi ed al feedback in forza generato con i comandi primari, è necessario replicare sull’operatore anche tutte le forze di natura inerziale (realizzando quella che viene definita retroazione inerziale o feedback vestibolare) con le quali è possibile far avvertire all’operatore quelle sensazioni che percepirebbe se si trovasse alla guida di un veicolo reale durante le fasi di accelerazione, di sterzata e, non ultimo, durante un impulso dinamico causato da errata manovra (impatto, ribaltamento, collisione, perdita di stabilità).
In generale, quindi, un simulatore può essere definito dinamico se l’opera di simulazione è affidata oltre che a sistemi grafici e sonori anche all’utilizzo di dispositivi in grado di fornire una retroazione inerziale (feedback vestibolare), indispensabile quando all’utente si vogliono far percepire movimenti o sollecitazioni necessari alla rappresentazione della realtà.
La struttura hardware di un simulatore dinamico (fig. 2-5), quindi, è molto simile a quella di un simulatore statico e si differenzia da essa per l’aggiunta della piattaforma di movimento, cioè di un sistema in grado di supportare e movimentare nello spazio il mock-up e in grado quindi, di generando i movimenti, di riprodurre sull’utente le azioni inerziali trasmesse da un veicolo in moto nella realtà.
L’utente, infatti, posizionato all’interno del mock-up ed immerso in ambiente virtuale ricreato attraverso i sistemi di visualizzazione, esegue le manovre di guida agendo sui comandi primari come lo sterzo, i pedali del gas o del freno ed il cambio. Questo determina, attraverso la retroazione dei segnali provocati dalle manovre stesse, la reazione del simulatore, il quale mediante organi di controllo grafico e sonoro aggiorna immagini e suoni in tempo reale in base alla posizione del veicolo nell’ambiente virtuale ed alla manovra di guida operata; inoltre attraverso servomeccanismi produce il movimento degli attuatori della piattaforma e quindi genera le azioni inerziali sull’utente. Tutto ciò permette all’operatore di percepire distintamente le forze inerziali provocate per esempio dalla simulazione di una accelerazione del veicolo o da una brusca frenata oppure permette di percepire per esempio la forza centrifuga generata sull’utente da una svolta repentina del mezzo condotto.
L’utilizzo di un simulatore dinamico o motion-based permette dunque di ottenere una simulazione di guida maggiormente realistica e l’utilizzo è destinato alla simulazione per l’addestramento alla guida del personale. Un simulatore dinamico, che permette la riproduzione totale degli stimoli ottici, sonori ed inerziali è chiaramente preferibile, perché, data la sua completezza, porterà risultati sicuramente migliori sulle capacità di guida del pilota.
D’altro canto è anche importante sottolineare che una simulazione per così dire “motion- based” non è sempre indispensabile; basti pensare all’utilizzo della simulazione per lo studio dell’ergonomia dell’abitacolo di un veicolo. In questo caso è di scarsa importanza la riproduzione del cosiddetto feedback vestibolare e quindi la presenza della piattaforma di movimento, mentre lo è molto di più una riproduzione accurata del mock-up e dei comandi primari del veicolo simulato.
Mock-up e comandi primari Piattaforma di movimento Sistema di controllo software Sistema di feedback visivo
2.1.2.1 Le piattaforme di movimento
Le piattaforme di movimento necessarie, come abbiamo detto, alla movimentazione del mock-up di un simulatore sono nella maggior parte dei casi realizzate tramite dispositivi elettromeccanici o oleodinamici basati su cinematica parallela (Piattaforma di Stewart) che, grazie alle loro peculiari caratteristiche di precisione, elevato rapporto carico/peso ed elevata rigidezza strutturale, risultano particolarmente adatte ad essere utilizzate come sistemi di movimentazione del mock-up del simulatore. In queste applicazioni le prestazioni dinamiche della piattaforma di movimento sono una caratteristica essenziale per rendere la simulazione più realistica e per valutare il comportamento del guidatore, offrendo un adeguato feedback vestibolare.
Esse sono costituite da un piano superiore mobile (end-effector) al quale è collegato il mock-up. Il pianale superiore è connesso ad un piano inferiore, ancorato a terra, per mezzo di link. Essi sono costituiti da coppie prismatiche dotate di un sistema di attuatori ad azionamento indipendente i quali possono essere elettrici o idraulici a seconda della massa da movimentare. Inoltre è presente un apparato di servocomando per la regolazione ed il controllo della corsa degli attuatori.
I vantaggi derivanti dall’utilizzo di manipolatori paralleli sono: • Rigidezza elevata.
• Bassa inerzia.
• Motori fissati alla base. • Elevata precisione.
• Elevato rapporto carico/peso. • Elevata frequenza naturale.
Lo svantaggio più importante dei manipolatori paralleli è invece quello di avere un workspace limitato. Il numero di gradi di libertà (DOF), quindi degli attuatori necessari alla movimentazione di una piattaforma, dipende strettamente dalle caratteristiche dinamiche del veicolo da simulare. Per veicoli dotati di una dinamica di moto riproducibile con manovre in ampiezza e numero limitate possono essere sufficienti piattaforme a 3 o 4 gradi di libertà (fig. 2-6).
Se invece si vuole riprodurre la totalità dei movimenti che ha un corpo rigido nello spazio (6 gradi di libertà), per la simulazione di veicoli che hanno una dinamica particolarmente complessa, bisogna necessariamente far ricorso ad una piattaforma 6DOF (fig. 2-7) costituita da 6 attuatori a coppia prismatica e meglio conosciuta come Piattaforma di Stewart.
Fig. 2-7, Piattaforma 6DOF della MOOG.
2.2 Conoscenze matematiche sulla vela
Allo stato dell’arte non esiste un algoritmo matematico in grado di produrre la resistenza sviluppata da uno scafo mentre naviga. Anche ricorrendo ad una soluzione numerica del problema fluidodinamico utilizzando il calcolo agli elementi finiti molti sono i problemi che restano aperti. Il metodo di gran lunga più utilizzato ad oggi rimane quello della misura sperimentale della resistenza utilizzando modelli in vasca navale. Tali test hanno la loro origine alla fine del 1800 quando dell’imbarcazione Shamrock III dell’America’s Cup venne misurata la resistenza all’avanzamento in condizioni di barca dritta e a barca sbandata.
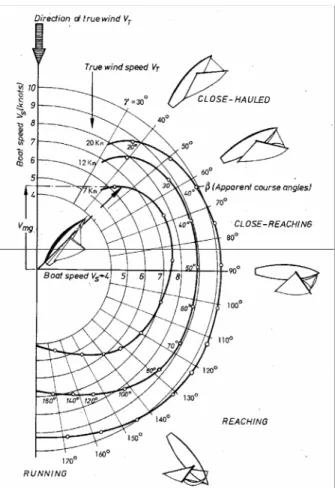
Il progresso nella progettazione di nuove barche a vela è andato di pari passo con lo sviluppo di nuove regole per l’assegnazione di punteggi di penalizzazione detti handicap per permettere a barche diverse in forma e dimensioni di gareggiare nelle stesse competizioni e poter correggere i tempi di arrivo in base a fattori correttivi che dovrebbero livellare tali differenze prestazionali e premiare solamente la bravura di conduzione dei vari equipaggi. Nel 1976 al Massachusetts Institute of Technology è stato sviluppato da Kerwin [40] il primo Velocity Prediction Program (VPP) che stima le performance di una barca a vela, dati la forma dello scafo e le dimensioni del piano velico, in base alla direzione e all’intensità del vento.
Fig. 2-8, Diagramma polare di un VPP
Le velocità stimate sono quindi usate all’interno del sistema di assegnazione dell’handicap. Vengono utilizzati algoritmi di ottimizzazione atti a stimare le migliori configurazioni delle vele con l’ottica di ottimizzare la velocità con una direzione relativa del vento conosciuta.
Tale valutazione viene fatta in condizione di regime ovvero calcolando la velocità della barca e l’angolo di sbandamento per una assegnata velocità ed angolazione al vento reale e sono inoltre considerati solamente il movimento di avanzamento e il movimento di rollio. Tali limitazioni non hanno tuttavia impedito l’utilizzo dei VPP all’interno dell’International Measuring System (IMS) e tale standardizzazione ha fornito notevoli vantaggi sia ai progettisti che ai velisti. Ai progettisti i risultati dei VPP sono fondamentali soprattutto nella prima fase dello sviluppo di una nuova imbarcazione, durante la quale le varie soluzioni costruttive vengono inserite nel programma per valutarne preliminarmente le performance. I velisti utilizzano i VPP per sapere quali target sia possibile raggiungere in termini di velocità dato il tipo di imbarcazione e le condizioni ambientali in cui si trovano a navigare. I diagrammi polari, vedi fig. 2-8, sono inoltre un importante strumento per lo skipper che in base ad essi decide il percorso da seguire in un’ottica di ottimizzazione della velocità. La migliore traiettoria in base alla direzione del vento è facilmente determinabile dai diagrammi polari e in base a queste informazioni lo skipper e l’equipaggio hanno dati in tempo reale per correggere rotta e regolazione vele per raggiungere l’ottimo.
Condizione necessaria per cui i VPP forniscano risultati attendibili è un ottimo modello parametrizzato dell’imbarcazione che andranno a simulare sia della parte idrodinamica che della parte aerodinamica.
2.2.1 Ricerche di settore sulle forze aero-idrodinamiche
Lo scopo di questa sezione è quello di riportare e di riassumere le principali ricerche in corso sul tema delle forze aero/idrodinamiche che verranno poi dettagliate e prese per riferimento nello sviluppo del modello analitico.
Il Prof. Gerritsma [33-36] e il Prof. Keuning [50-53] hanno condotto presso l’Università olandese di Delft un’estesa serie di esperimenti su modelli in scala di barche a vela denominata “Delft Systematic Yacht Hull Series”. Lo strumento matematico utilizzato in questi esperimenti è stato la strip theory che prevede una iniziale suddivisione dello scafo in 20-30 sezioni per poi calcolarne i coefficienti idrodinamici bidimensionali, e successivamente un’integrazione su tutta la lunghezza dello scafo per risolvere il problema tridimensionale. Usando tale teoria, è stato possibile determinare una serie di espressioni polinomiali approssimanti le forze idrodinamiche che agiscono su una barca a vela in funzione dei principali parametri geometrici descrittivi della forma dell’imbarcazione. La serie di esperimenti, iniziati nel 1986, ha condotto alla formulazione di espressioni analitiche approssimate per 50 modelli di barche a vela. Un primo risultato di tali esperimenti è riportato in bibliografia [36] in cui sono descritti i risultati su test. In accordo con la strip theory, la geometria dell’imbarcazione può essere interamente descritta dai principali parametri di forma e in particolare dalla resistenza prodotta dal solo scafo. Tale teoria definisce un modello dell’imbarcazione attraverso una serie di curve longitudinali che forniscono tutti i parametri necessari alla descrizione dei piani costruttivi dell’imbarcazione. Tali parametri poi venivano fatti variare singolarmente e veniva inserita la loro influenza attraverso coefficienti determinati attraverso una regressione lineare. Successivamente sono stati condotti ulteriori esperimenti [50, 51] per determinare le forze prodotte dalle appendici di carena, quali deriva e timone. In particolare l’effetto dello scarroccio e dello sbandamento sulla produzione della forza laterale è stato studiato in [46]. Uno studio dell’accuratezza della ripetibilità delle misure effettuate in vasca è presenta in [8].
Il modello aerodinamico all’interno del VPP presentato da Kerwin [49] descriveva la produzione di forza aerodinamica solamente attraverso le principali dimensioni geometriche della velatura. Un miglioramento significativo a tale modello è stato introdotto da Hazen [44] nel 1980. Tale modello considera due ulteriori parametri per la regolazione delle vele: il coefficiente di terzarolo e il coefficiente di regolazione della curvatura delle vele. Partendo da questi lavori iniziali sono stati introdotti notevoli miglioramenti resi possibili grazie a vaste campagne di misura in galleria del vento e più recentemente ai risultati di studi effettuati con i Computational Fluid Dynamics (CFD). Di notevole dettaglio sono gli studi di Marchaj [65] in cui sono stati in particolare analizzati gli effetti della forma della vela sui coefficienti di portanza e resistenza della vela stessa. In uno studio basato su misure all’interno della galleria del vento [57] e [63], con semplici considerazioni geometriche, è stato introdotto l’effetto dell’angolo di sbandamento. La quasi totalità delle misurazioni degli sforzi e delle sollecitazioni su un’imbarcazione a grandezza naturale sono state effettuate presso l’università Technischen Universität di Berlino mediante l’utilizzo della barca a vela da ricerca DYNA. Attraverso una serie di trasduttori è stato possibile costruire un modello completo agli elementi finiti, i cui principali risultati sono presentati in [40].
L’utilizzo della galleria del vento, e quindi la possibilità di ricorrere a modelli in scala delle barche a vela per l’analisi, ha introdotto notevoli problemi riguardo alle differenze fra misurazioni effettuate su modelli e test su scafi reali. In [41] tale comparazione è stata
Mediante ulteriori campagne di misurazioni in galleria del vento [26] e [30] sono stati introdotti gli effetti della non uniformità del flusso d’aria che incontra le vele, sia in termini di raffiche che in termini di non uniformità del profilo del vento in base all’altezza dal pelo dell’acqua. In particolare presso l’Università di Auckland è stato realizzata una galleria del
vento finalizzata allo studio delle velatura di una barca a vela [41] (Fig. 2-9). Tale galleria ha la possibilità di deflettere il flusso d’aria prodotto in funzione dei parametri di simulazione e del vento apparente visto dalla barca.
Fig. 2-9, Galleria del vento dell'università di Auckland
L’interazione delle vele è presentata in [33]. In particolare vengono valutate le principali differenze che si creano se la barca è dotata solamente del fiocco o della randa e la tipica configurazione in cui sono presenti entrambe le vele.
Infine in [29] e [73] sono riportati due articoli relativi alle problematiche dell’America’s Cup in cui il progetto di una velatura leggera e performance assume aspetti agonistici. Recentemente, ai software VPP si sono affiancati i Computational Fluid Dynamics (CFD) che, grazie a miglioramenti prestazionali dei computer, hanno permesso di inglobare i risultati ottenuti dalla risoluzione delle equazioni di Navier–Stokes e quindi ottenere uno studio più dettagliato dei fenomeni di interazione dei flussi acqua e aria con la barca a vela. Mentre i VPP consentono solo uno studio delle performance generali dell’imbarcazione, i CFD stanno permettendo uno studio più approfondito mirato ad una ottimizzazione aerodinamica.
I più recenti software CFD utilizzano la risoluzione delle Reynolds Average Navier-Stokes Equation (RANSE) applicate ad un fluido uniforme intorno all’imbarcazione alla ricerca della resistenza all’avanzamento che la barca incontra procedendo in diverse condizioni ambientali in base alla forma dell’onda creata dalla barca stessa. In [4] sono presentati recenti risultati di tali simulazioni e sono considerati i movimenti non uniformi dell’imbarcazione e la regolazione delle vele. In [65] è discussa l’importanza degli studi condotti tramite CFD per ottimizzare i profili aero e idrodinamici soprattutto in competizioni di eccellenza quali l’America’s Cup e tale tema è ripreso da [70] e [39]. In questo particolare ambito agonistico sono stati stanziati considerevoli fondi per studi di ottimizzazione della forma dello scafo e tecniche di conduzione sono state condotte mediante algoritmi genetici [58] e un approccio ad elementi finiti [28]. Molti sono gli studi per la validazione delle simulazioni in base ai dati reali, ad esempio in [71] sono
confrontati i risultati ottenuti dal più avanzato software CFD Rapid considerato oggigiorno lo stato dell’arte e in [77] è riportata un’attenta analisi comparativa fra i risultati ottenuti tramite misurazioni in vasca e i risultati tramite l’integrazione delle RANSE.
I risultati ottenuti sono spesso rappresentati in forma grafica e in base a scale di colori sono mostrati diversi livelli di pressione a cui sono sottoposte varie parti dello scafo e delle appendici di carena.
Fig. 2-10, Rappresentazione grafica dei risultati ottenuti con software CFD
Recenti sviluppi della grafica tridimensionale hanno inoltre permesso una più immediata rappresentazione dell’andamento reale dei flussi di fluido prima e dopo l’incontro con le varie superfici dell’imbarcazione. Ad esempio in Fig. 2-11 è mostrato l’andamento delle linee di flusso attorno ad una combinazione randa-spinnaker.
Fig. 2-11, Rappresentazione grafica tridimensionale delle linee di flusso calcolate tramite un software CFD
2.3 Specifiche simulazioni in ambito vela
I simulatori di barche a vela oggi disponibili si limitano a giochi per il personal computer. Il livello di realismo raggiunto è notevole grazie soprattutto ai progress fatti nel campo delle schede grafiche. Sono descritti le principali caratteristiche di due dei principali giochi attualmente in commercio:
• Sail Simulator 4.2 • Virtual Skipper 4
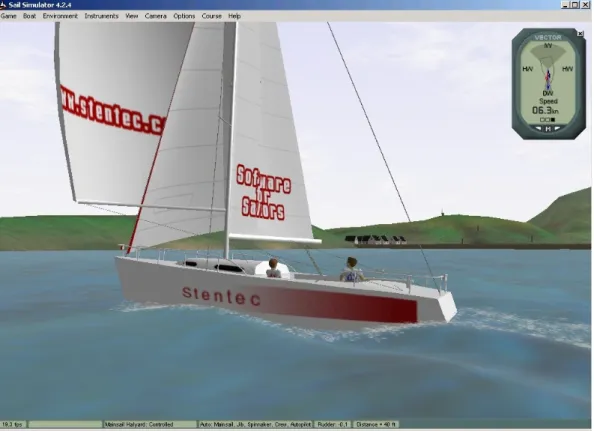
2.3.1 Sail simulator 4.2
Sail simulator 4.2, di cui in fig. 2-12 è presente uno screenshot, si presenta come un classico software per la guida di un veicolo o natante in cui è possibile determinare lo scenario di simulazione attraverso menu.
Nel gioco è disponibile un pannello degli strumenti contenente una bussola, un diario di bordo, un sonar di profondità, un anemometro e un ricevitore GPS. E’ possibile l’utilizzo di un riquadro in cui viene visualizzato la mappa dello scenario prescelto sul quale è possibile stabilire una rotta mediante waypoints ed avere la posizione precisa tramite l’uso del GPS.
Il modello matematico prevede una simulazione realistica delle onde in cui l’altezza e la lunghezza di esse è definita dall’intensità del vento e particolare attenzione è stata data all’infrangersi delle onde sullo scafo. La sensazione del vento, non realmente percepibile dall’utente, è stata data da l’utilizzo di indicatori tipo bandierine che si muovono in base al flusso d’aria con cui sono colpite.
I comandi sul timone sono possibili tramite il movimento del mouse oppure tramite un’unità di controllo venduta separatamente che riproduce una tipica barra del timone montata sulle barca a vela. E’ inoltre possibile l’utilizzo di un joystick con ritorno di forza con il quale è possibile sentire le percezioni del timone e randa.
Sono disponibili una serie di imbarcazioni fra cui Laser, Soling, Valk, 10m Sailing Cruiser, Flying Dutchman and Optimist ed altri modelli sono disponibili nel sito del produttore del gioco.
A seconda dello scenario di simulazione è possibile selezionare l’ora del giorno in cui eseguire la simulazione stessa e inoltre è possibile definire la nuvolosità con indipendente direzioni e velocità rispetto a quella avvertita al livello del mare. Inoltre è possibile impostare la visibilità dello scenario da un minimo di 100 m ad un massimo di 60km e la visualizzazione di altre imbarcazioni e del paesaggio tiene conto della curvatura terrestre. Sail Simulator 4 contiene inoltre un corso di vela per principianti in cui è possibile imparare a navigare mediante un istruttore automatico.
La posizione dell’equipaggio è determinabile tramite la tastiera o il joystick oppure in modo automatico dal programma. E’ inoltre presente un’opzione di regolazione automatica della velatura che permette di concentrarsi solamente nelle manovre e nella navigazione. Infine è disponibile un’opzione di manovra automatica tramite GPS o waypoints.
Caratteristiche salienti:
• Multi giocatore (rete locale e Internet) • Motore grafico integrato con le DirectX • Controllo tramite Joystick a ritorno di forza • Supporto all’accelerazione hardware
• Varie imbarcazioni selezionabili: Stentec Laser, Flying Dutchman, Optimist, Sailing Cruiser 33, Valk (6 m), Volvo Ocean Racer Tornado Catamaran, America's Cup Racer, Flash e Splash.
• Possibili scenari virtuali: Isola di Ushant (Francia), Lago Luzern (Svizzera), Lago di Costanza (Germania), Mare aperto, St.Martin (Antille)
• Corso di vela per principianti all’interno di una speciale area di addestramento • Strumentazione disponibile: Bussola, diario di bordo, GPS, radar di profondità,
meteo
• Regolazione automatica della velatura.
• Regolazione automatica della posizione dell’equipaggio e autopilota • Controllo del motore
2.3.2 Virtual Skipper 4
Lo stato dell’arte dei simulatori ludici di barche a vela è a tutt’oggi rappresentato da Virtual Skipper 4. Quest’ultimo, rispetto al precedente simulatore, è finalizzato alle competizioni. I possibili scenari di simulazione sono 12 ed è possibile crearne di nuovi mediante l’utilizzo dell’editore di mappe.
stata poi fatta alla modellazione del cielo e del paesaggio per rendere la simulazione più realistica possibile.
Caratteristiche salienti:
• 4 tipi di imbarcazioni da competizione: ACC monohulls, Melges 24, OffShore Racer e Trimaran Open 60 multihull
• 12 diversi scenari di navigazione fra cui Marsiglia, Valenzia, Vancouver, Napoli, Rio de Janeiro e Qingdao
• Miglioramenti sullo scivolamento dell’imbarcazione dipendente dal moto ondoso e condizioni ambientali
• Gestione del mare indipendente dal comportamento del vento
• Tempo atmosferico casuale e miglioramenti sulla variabilità del vento
• Possibilità di importare il proprio modello tridimensionale e personalizzare il suo VPP
• Editore d mappe con possibilità di editare paesaggi nordici e tropicali
• Numero illimitato di avversari in regata e possibilità di visualizzare una regata in modalità “spettatore”
In fig. 2-13 e in fig. 2-14 sono presenti due schermate di Virtual Skipper 4 scaricata dal sito ufficiale che mette in risalto il dettaglio con cui è stata curata la resa grafica del mare e in generale dello scenario virtuale entro la quale la navigazione ha luogo.
Fig. 2-13, Screenshot di Virtual Skipper 4 in cui è possibile ammirare il dettaglio con cui è stato visualizzato il mare