Descrizione della procedura di collaudo sviluppata
La procedura di collaudo sviluppata nell’ambito di questa tesi, può considerarsi a tutti gli effetti risoluzione di un problema di reverse engineering, rivolto nel nostro caso oltre che al rilievo e alla ricostruzione della forma anche alla misura dell’oggetto ricostruito, infatti, come si vedrà nel capitolo successivo, si è posta molta attenzione alla precisione dei dati ottenuti, sia in fase di acquisizione che in fase di ricostruzione.
Premesso che la prima operazione da effettuare consiste nella calibrazione del dispositivo ottico, argomento già ampiamente trattato nel capitolo 2, per meglio descrivere l’intera procedura, possiamo suddividerla nelle seguenti fasi principali, che verranno discusse in maniera più dettagliata nei paragrafi successivi:
• Preparazione della postazione di lavoro • Pianificazione della campagna di acquisizione • Acquisizione delle singole patches
• Allineamento delle nuvole di punti
5.1 Preparazione della postazione di lavoro
5.1.1 Posizionamento della semicassa
Come gia più volte accennato gli oggetti del nostro studio, sono rappresentati dalle semicasse dei compressori MCL, trattandosi di oggetti di notevoli dimensioni, basti pensare che la semicassa più piccola in produzione presenta una lunghezza di circa 3 m e un raggio di virola di circa 1,5 m, risulta impossibili rilevare tutta la superficie interna ed esterna con un unico posizionamento. Fatte alcune valutazioni sui possibili posizionamenti in relazione alla capacità di poter poi rilevare tutte le parti di nostro interesse con maggior facilità e in relazione al fatto di limitare il più possibile la movimentazione della semicassa, essendo questa un operazione vincolata all’utilizzo di un carroponte e alla presenza di un operaio addetto alla movimentazione dei carichi sospesi, ma soprattutto molto dispendiosa in termini di tempo (circa 30min), abbiamo stabilito quindi di effettuare due soli posizionamenti sia nel caso di semicassa senza maniche, sia nel caso di semicassa con le maniche.
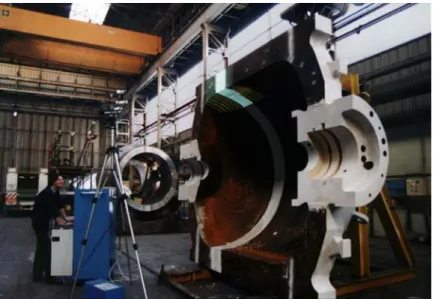
Prima di effettuare i posizionamenti definitivi bisogna controllare sempre che la zona di lavoro attorno alla semicassa sia sufficientemente ampia per potersi spostare liberamente attorno alla stessa mantenendo sempre la corretta distanza di acquisizione. In entrambi i casi il primo posizionamento viene effettuato appoggiando la semicassa con asse parallelo al terreno, su due appositi rialzi in corrispondenza dei cuscini (Figura 5.1).
In questo modo girando tutto intorno con il digitalizzatore è possibile rilevare tutta la superficie esterna del marciapiede, parte della superficie esterna della virola e nel caso della presenza delle maniche anche la loro superficie. Per quanto riguarda invece il secondo posizionamento le semicasse senza maniche vengono sistemate su di un apposita spalliera di sostegno appoggiate su un marciapiede, mentre quelle con le maniche vengono sempre appoggiate su di un marciapiede, senza utilizzare però la spalliera perchè sono le maniche stesse che funzionano da appoggi, in entrambi i casi la parte interna deve essere rivolta verso il digitalizzatore (Figura 5.2). Con questo secondo posizionamento è quindi possibile rilevare l’intera superficie interna e completare così il rilievo dell’intera semicassa.
Figura 5.2. Posizionamento della semicassa senza maniche, si può notare nella parte posteriore la spalliera di sostegno, e la parte anteriore della semicassa completamente libera e rivolta dalla parte del digitalizzatore per consentire una più agevole scansione.
5.1.2 Pianificazione della campagna di acquisizione e posizionamento dei marker
Come vedremo successivamente, poiché il numero di acquisizioni risulta essere molto elevato e poiché la tecnica di riallineamento delle nuvole di punti, richiede la presenza di almeno tre marker comuni a due scansioni successive; risulta necessario stabilire a priori come procedere durante la fase di acquisizione, per limitare sia il numero delle singole scansioni, sia le zone di sovrapposizione ridondanti, e poter posizionare un corretto numero di marker. Si è cercato quindi di
trovare una metodologia nel percorso di scansione che potesse essere applicata a tutte le tipologie di casse.
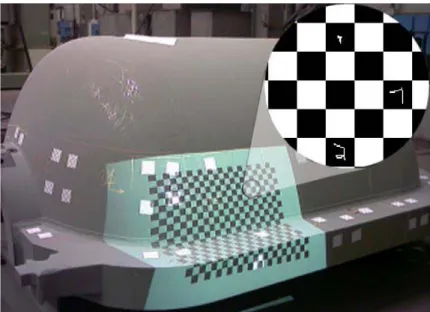
Si posiziona il digitalizzatore ad una distanza pari a quella di scansione di fronte alla parte centrale di uno dei due marciapiedi e si proiettata l’immagine di una scacchiera (Figura 5.3), che ha una duplice funzione: consente di individuare con esattezza la parte di superficie del marciapiede inquadrata (patches), e nello stesso tempo consente di mettere a fuoco il proiettore, controllando la definizione dei simboli presenti all’interno di alcuni quadrati della scacchiera stessa.
Figura 5.3. proiezione della scacchiera per la messa afuoco del proiettore e la definizione dell’area di superficie acquisita
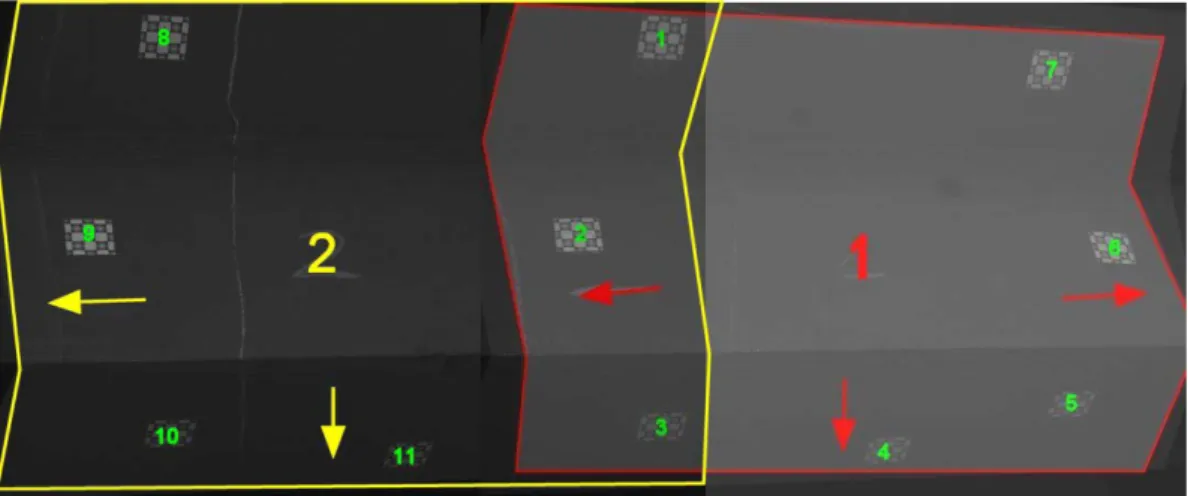
Si posizionano quindi sette marker come mostrato in Figura 5.4, si evidenzia con un gessetto colorato il contorno dell’immagine proiettata per identificare la parte di superficie rilevata e si identificano sia i marker che le patch con una numerazione progressiva. La patch così individuata diventa il punto di partenza per le successive sequenze di scansione, infatti per come sono stati disposti i marker, è possibile procedere secondo le tre direzioni indicate dalle frecce rosse in Figura 5.4, per questo motivo viene denominata nodo. Si sceglie quindi una direzione, si sposta il dispositivo in tale direzione e si prepara la nuova porzione di superficie come la precedente, posizionando un numero di marker adeguato in funzione delle direzioni che si vuole avere a disposizione nelle scansioni successive.
Figura 5.4. Preparazione della porzione di superficie inquadrata, prima di effettuare la scansione
La nuova patch deve in ogni caso avere una zona di sovrapposizione con la precedente in corrispondenza dei marker (Figura 5.5), perché, come verrà spiegato in seguito, proprio grazie a questa sovrapposizione e possibile applicare la tecnica fotogrammetrica per l’allineamento delle nuvole. Procedendo in questo modo si generano un certo numero di sequenze e di nodi, che creano una specie di mappatura di tutta la superficie da rilevare (Figura 5.6); tale mappatura viene riportata su di un foglio sottoforma di schema a blocchi, che verrà poi utilizzato nella successiva fase di riallineamento delle nuvole di punti (Figura 5.16).
Figura 5.5. Rappresentazione di due porzioni di superficie adiacenti, si può vedere chiaramente la zona di sovrapposizione, all’interno della quale sono presenti i marker necessari per il riallineamento.
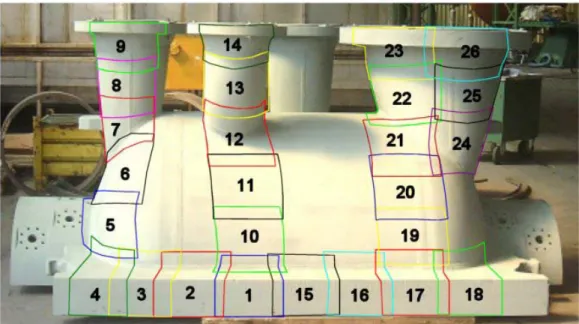
Figura 5.6. Esempio di mappatura di puna parte della superficie esterna di una semicassa con le maniche.
5.2 Acquisizione delle singole patch
5.2.1 Scansione
Come gia ampiamente descritto nel capitolo 3 la scansione si basa su una tecnica di tipo Coded-light, sviluppata nel corso di studi precedenti e ottimizzata durante lo svolgimento di questa tesi. Nel nostro caso abbiamo cercato di spingere al massimo il numero di punti codificati, per ottenere precisioni al di sotto del millimetro, infatti vengono proiettate 40 immagini a frange bianche e nere: 20 con le frange verticali e 20 con le frange orizzontali, in entrambi i casi vengono quindi codificate 1.023 linee, la cui intersezione genera una codifica di 1.046.529 di punti. Questo, considerando che il nostro campo di acquisizione presenta un area di circa
1000 800 800000× = mm2, si traduce in una risoluzione di punti acquisiti molto
elevata, infatti si ottiene circa un punto ogni millimetro. Come è facilmente intuibile, si possono ottenere risoluzioni diverse, cambiando il numero di immagini proiettate, a scapito però della precisione dei risultati ottenuti.
Il processo di scansione avviene in modo automatico, attraverso una routine scritta in linguaggio C++, che invia al proiettore la sequenza di immagini, e contemporaneamente, gestisce le due telecamere per l’acquisizione delle stesse (Figura 5.7). Alla fine del processo si ottengono quindi 80 immagini (40 per la
telecamera destra e 40 per quella sinistra), più due immagini acquisite dalle telecamere senza che venga proiettato nessun pattern. Queste due immagini che saranno definite con il termine di immagini bianche, come vedremo nei paragrafi successivi hanno due scopi: il primo in fase di riallineamento in cui vengono richiamate per andare a selezionare i marker della zona comune a due patch adiacenti, il secondo in fase di elaborazione delle immagini, in cui vengono richiamate per determinare la maschera e il valore di soglia.
Figura 5.7. Raffigurazione della sequenza dei primi 10 pattern a frange orizzontali proiettati, inoltre sotto ognuno di questi è riportata la relativa immagine acquisita da una delle due telecamere
5.2.2 Elaborazione digitale delle immagini
Il processo di elaborazione delle immagini, riveste un ruolo di notevole importanza all’interno di tutto il processo di ricostruzione tridimensionale, infatti è proprio in questa fase che avviene la codifica delle immagini. Per questo scopo è stata sviluppata un routine di calcolo in codice Matlab®.
La procedura elabora in modo analogo sia le immagini della telecamera destra sia quelle della telecamera sinistra, per cui analizziamo solo uno dei due casi. La prima fase consiste nella lettura delle 40 immagini, subito dopo l’utente viene chiamato a settare due parametri, uno per la determinazione del valore di soglia da
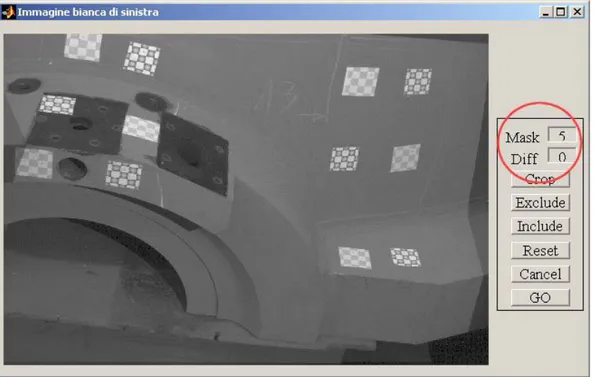
applicare alla maschera e l’altro per la determinazione del valore di soglia delle immagini differenza (Figura 5.8).
Figura 5.8. Interfaccia grafica del programma in codice Matlab®, nel circoletto rosso sono evidenziati i due
parametri di soglia che l’utente è chiamato ad impostare.
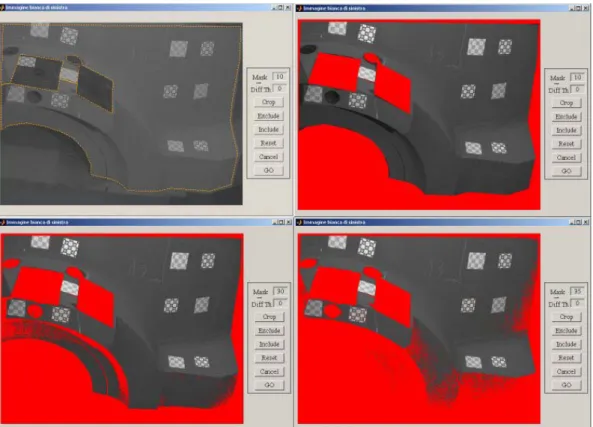
Tramite una routine inserita all’interno del codice, l’utente definisce direttamente la maschera, ossia la parte dell’immagine all’interno della quale verranno eseguiti i calcoli per la triangolazione, questo consente quindi di eliminare tutte la zone dell’immagine che non interessano, o che potrebbero dare cattivi risultati. Ragionando in termini di scala di grigi, il valore di soglia impostato stabilisce in pratica il livello di grigio al di sotto del quale il sistema non va ad eseguire i calcoli all’interno della maschera ritagliata (Figura 5.9).
Il secondo parametro invece consente al sistema di effettuare la vera e propria binarizzazione dell’immagini, infatti tutti i pixel che hanno un livello di grigio superiore al valore di soglia impostato vengono associati con il valore 1 (bianco), mentre gli altri vengono associati con il valore 0 (nero). Nel nostro caso specifico proiettando sia frange orizzontali che verticali, otteniamo una doppia codifica che mi individua in modo univoco ogni pixel dell’immagine, risolvendo così il problema delle corrispondenze con l’immagine della seconda telecamera.
Figura 5.9. Nell’immagine in alto a sinistra, è raffigurato il risultato finale dell’operazione manuale di ritaglio della maschera, mentre nelle restanti immagini sono riportati tre esempi di variazione del valore della soglia.
5.2.3 La generazione della nuvola di punti
Tenendo conto dell’equazioni riportate nel paragrafo 3.3.1, e delle corrispondenze ricavate nel precedente processo di elaborazione delle immagini, il programma è in grado di determinare le coordinate spaziali dei punti appartenenti alla superficie scansita. È necessario però fornire al sistema i parametri della calibrazione.
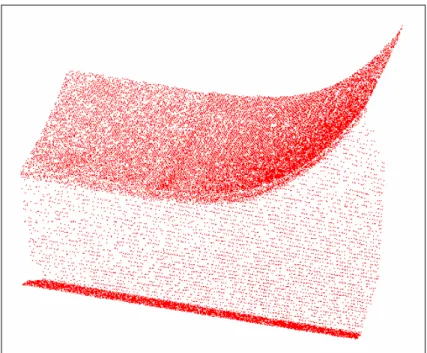
Durante l’esecuzione il programma visualizza su di un grafico i punti da triangolare e consente all’utente di intervenire per eliminare eventuali punti che non interessano, generati per esempio da un valore di soglia troppo basso nella definizione della maschera, o da effetti di riflessione, dovuti alle imperfezioni della superficie acquisita (Figura 5.10). Al termine di questa operazione il programma fornisce una terna di coordinate XYZ per ogni punto processato, l’insieme della quali costituisce la cosiddetta nuvola di punti o shell.(Figura 5.11).
Figura 5.10. Rappresentazione della sequenza di operazioni che l’utente è chiamato ad affettuare per la rimozione del rumore, vengono ritagliate le zone che presentano punti non apparteneti alla nuvola, come è chiaramente visibile nella zona cerchiata in rosso. Tali punti vengono quindi esclusi dal processo di ricostruzione.
Figura 5.11. Rappresentazione della nuvola di punti ottenuta da una singola scansione.
5.3 Allineamento delle nuvole di punti
Il processo di allineamento delle nuvole di punti, relative a due porzioni di superficie adiacenti, e stato risolto utilizzando la tecnica della fotogrammetria. Nel nostro caso però, a differenza di quello che comunemente accade, il processo di determinazione dei punti, per eseguire l’allineamento, è completamente integrato nel sistema.
Prendendo in considerazione due acquisizioni adiacenti, il sistema determina per ognuna di esse le coordinate 3D dei punti, appartenenti ai marker presenti nella porzione di superficie comune. Vengono così generate due nuvole che contengono i medesimi punti, ma riferite a due posizionamenti differenti della terna di riferimento della telecamera nello spazio. A questo punto utilizzando la fotogrammetria, è possibile risalire ai parametri che caratterizzano lo spostamento della telecamera tra le due acquisizioni adiacenti; conoscendo infatti le coordinate di un certo numero di punti, opportunamente distribuiti sulla superficie dell’oggetto è possibile risalire alla matrice di rotazione e traslazione che lega la posizione della terna nei due istanti successivi. Applicando quindi il moto trovato ad una delle due nuvole, queste si vengono a trovare in un sistema di riferimento comune, come se si fosse realizzata una unica scansione
Anche in questo caso per gestire la procedura di allineamento è stato sviluppato un programma in codice Matlab®. Lanciato il programma, viene visualizzata sullo schermo una finestra dove sono presenti le imaagini bianche relative alle due patch da allineare (Figura 5.12). Tramite questa finestra l’utente deve controllare che i numeri identificativi dei marker corrispondano a quelli riportati nello schema compilato in fase di pianificazione delle scansioni, e la loro orientazione. Questo tipo di controllo serve sia per evitare di compiere errori, andando ad allineare due nuvole non adiacenti, ma soprattutto, perchè la procedura prevede che i marker vengano selezionati nello stesso modo e con lo stesso ordine in tutte e quattro le immagini. Viene inoltre richiesto di inserire il numero di marker che si vogliono selezionera, questo perchè a volte può succedere che alcuni di questi non sono ben visibili, e quindi difficilmente selezionabili. A questo punto viene chiesto all’utente di selezionare i quattro spigoli di ogni marker, e il software, con una
procedure del tutto analoga a quella utilizzata in fase di calibrazione, procede all’estrazione dei relativi punti (Figura 5.13).
Figura 5.12. Interfaccia grafica della finestra di selezione dei marker.
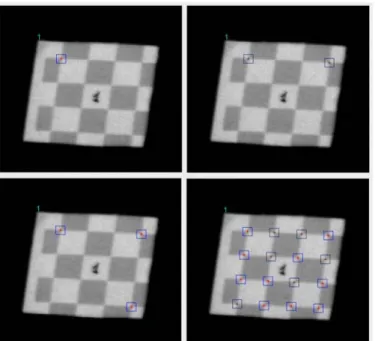
Completata la selezione di tutti i marker, viene visualizzata una nuova finestra, attrverso la quele l’utente può controllare che il numero di punti estratti per ogni marker sia il medesimo, ma soprattutto, che tali punti coincidano effettivamente con gli spigoli dei qudrati all’interno degli stessi marker (Figura 5.14).
Figura 5.13. Sequnza di selezione degli spigoli del marker, ed estrazione dei punti interni ad esso
Nel caso ciò non si verificasse, è necessario ripetere la procedura, ponendo maggior attenzione alle zone che hanno originato gli errori, procedendo eventualmente ad eliminarle dalla procedura di estrazione. Il software esegue quindi, in maniera del tutto automatica, il calcolo delle matrici di rotazione e traslazione del moto da applicare ad una delle due nuvole, e visualizza la registrazione delle stesse in un unico sistema di riferimanto (Figura 5.15).
Figura 5.14 Finestra di output alla fine del processo di estrazione dei punti sui markers, sopra ogni immagine viene riportato il numero di punti estratto per ogni marker.
Chiaramente il processo di ricostruzione dell’oggetto nella sua interezza non si esaurisce con un unico allineamento, è necessario, infatti, eseguire una serie di allineamenti successivi, in base al numero di scansioni che sono state effettuate per rilevare tutta la superficie dell’oggetto stesso. Come già precedentemente accennato, durante la fase di pianificazione della campagna di acquisizione, viene compilato uno schema a blocchi in cui, ogni blocchetto corrisponde a una determinata acquisizione. All’interno di ogni blocchetto viene riportato il numero identificativo della scansione e i numeri identificativi dei markers comuni alla patch adiacente. Questo metodo si è dimostrato un valido aiuto per allineare le numerose nuvole, senza incappare in errori
e soprattutto ci ha consentito di effettuare gli allineamenti in momenti successivi alle operazioni di scansione, diminuendo notevolmente i tempi di fermo cassa.
Prendendo come riferimento la schematizzazione fatta in Figura 5.16, per ottenere una l’intera nuvola nell’unico sistema di riferimento del nodo principale 1 (blocchetto rosso), si procede come segue: si parte per esempio ad allineare la sequenza 10-9-8-7-6-5-4, si ottiene in questo modo una sola nuvola nel sistema di riferimento del nodo secondario 4, si allinea poi la sequenza 12-11-4, ottenendo così le due sequenze nello stesso sistema di riferimento. Si procede quindi ad allineare la sequenza 4-2-3-1, registrando quindi questa prima serie di nuvole tutte nel sistema di riferimento del nodo 1. Procedendo in questo modo per tutte le altre sequenze si riesce a completare la ricostruzione.
Figura 5.15. Finestra di layout del processo di allineamento, dove viene visualizzata la registrazione delle due nuvole in un unico sistema si riferimento comune. Nel riquadro in basso a destra è stata riportata la rappresentazione in formato STL delle due nuvole.
Figura 5.16 Schema a blocchi in cui vengono riportate le sequenza di scansione effettuate per rilevare la superficie della semicassa.
5.4 Elaborazione dei dati e stesura del piano di collaudo
La nuvola ottenuta con la procedura di allineamento, viene in questa fase del processo importata all’interno del programma Surfacer®, che consente la gestione e l’elaborazione di nuvole di punti. Attrverso quindi la generazione di sistemi di riferimento opprtuni e di entità geometriche di best-fit, come ad esempio piani e cilindri, si riescono a deterninare le grandezze richieste dal piano di collaudo (. In questo caso però non è stata definita una vera e propria metodologia per determinare le dimensioni di nostro interesse, inquanto la gestione delle nuvole si è rilevata particolaremente complicata, in aggiunta al fatto che il software utilizzato, presuppone comunque una certa esperienza e una più approfondita conoscenza. Nonostante questo come si vedrà nel prossimo capitolo si è riusciti a ricavare alcune grandezze siglificative da poter confrontare con quelle misurate dagli operai specializzati con la procedura attualmente utilizzata.
2 1 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 28 29 27 26 25 24 23 22 31 30 32 37 33 34 35 36 39 38 40 41 42 43
Figura 5.17 Esempio di alcune entita geometriche ricavate come superfici di best-fit di parti della nuvola di punti. In particolare si può osservare il piano della superficie di accoppiamento delle due semicasse, il cilindro dell’anello statorico e i piani delle facce esterne dei due cuscini.