ALMA MATER STUDIORUM – UNIVERSITA’ DI BOLOGNA
SEDE DI CESENA
SECONDA FACOLTA’ DI INGEGNERIA CON SEDE A CESENA
CORSO DI LAUREA IN INGEGNERIA BIOMEDICA
SVILUPPO E CARATTERIZZAZIONE DI ALGORITMI DI
SEGMENTAZIONE PER L'ANALISI DEL CAMMINO IN ACQUA
CON TECNICA MARKERLESS
Elaborato in
Biomeccanica
Relatore
Prof.ssa Silvia Fantozzi
Correlatore
Ing. Luca Tersi
Presentata da
Valeria Mondini
Sessione Seconda
Abstract
Recenti st udi h ann o evid enzi ato com e il cammi no in ambi ent e acqu ati co poss a port are a n otevoli ben efi ci n ell ’ambit o di un pro cess o riabilit ati vo: il cam mino in acqu a è in fatti o ggi consi derato una d ell e prin ci pal i terapi e p er p azien ti con di stu rbi nella deamb ul azione, olt re ad ess ere impi egat o per mi gli orare il recupero a seguit o di i nterv enti ed in fo rtu ni. Un a carat terizzazio ne biom eccani ca d el camm i no um ano in acq ua perm ett erebbe tutt avi a di giu n gere a un a con os cenz a più app ro fo ndit a degli effetti di qu est ’attiv it à s ul process o ri abil itati vo, e dunq ue a un a su a p rescrizio ne pi ù mirata come p art e del le terapi e. Non ost ant e il cres cente i nteress e, uno dei motivi per cui an cora po ch i studi so no stat i con dotti in qu esto s ens o risi ed e n ell ’in adeg uat ezza di molti dei t radizion ali sist emi di Moti on Cap tu re ri sp etto al l’impi ego sub acqu eo. La nuo va bran ca d ell a M ark erless M otio n Captu re potreb b e inv ece in qu est o sens o rapp resent are un a s oluzion e. In p art icol are, ci si occup erà in q uesto l avo ro di t esi d ell a t ecni ca m ark erless b asat a sul la ricost ruzio ne del v i sual hull p er retrop roi ezion e d ell e silh ouette. Il pro cess o inizi al e che perm ett e di o ttenere le sil hou ett e d ai vid eo d ell e acquis izioni è dett o s egmen tazi on e, l a q ual e è an ch e una fas e parti col arment e imp ort ant e p er o ttenere una bu on a accu ratezza fin al e nell a ri co struzion e dell a cin em ati ca art icolare. Si son o pert an to svilu pp ati e caratt erizzati in qu est o lav oro di t esi s ett e al goritmi di segm en tazi on e, n at i speci fi cament e nell ’ot tica d ell ’an alisi d el cammino i n acqu a con tecn ica m arkerl ess. Si mos trerà i nol tre co me det ermin at e caratteri stiche degli al go ritm i infl uenzino l a q ual ità fin al e dell a segm ent azion e, e s arà in fin e pres en tato un ult erio re al goritm o d i post -p ro cessin g per il migli oram ent o dell a qu alit à d ell e immagin i segm en tat e.
Indice
Abstract... 3
Introduzione ... 8
1. Acquisire il movimento... 12
1.1 Mo ti on Captu re: d efinizi one e a mbi ti appl icati vi ... 12
1.2 L ’a cquisi zi one d el mov i men to allo stato del l’arte ... 13
1.2. 1 I m eto di n on ot tici ... 16
1.2. 2 La st ereo fot o gramm etria ... 19
1.3 L a tecni ca mark erless ... 23
1.3. 1 Descrizio ne d ella t ecni ca ... 25
1.3. 2 Vantaggi e p ro blemi ... 32
1.4 L ’an alisi del ca mmin o in acqu a con tecni ca ma rkerl ess ... 33
1.4. 1 Vantaggi o ffert i d all’am bient e acqu ati co sul proces so riabilit ati vo ... 33
1.5 Ob iettivo del la tesi ... 35
2. Materiali e Metodi ... 38
2.1 Ma terial e an ali zza to ... 38
2.2 Alg oritmi svilup pati p er l a s eg mentazi one del so gg etto ... 39
2.2. 0 C reazio ne di u n mod ell o p er il b ack groun d ... 40
2.2. 1 Sot trazion e/ div ision e del b ack gro un d e So gl iat ura ... 41
2.2. 2 Nai ve Ba yes Cl assi fi er ... 43
2.2. 3 Nai ve Ba yes Cl assi fi er, ap plicat o a i mmagi ni già di vis e p er il back gro und ... 47
2.2. 4 Nai ve Ba yes Cl assi fi er, co n aggi orn am ento gui d ato dei paramet ri d el mo d ell o assum en do an d amenti lin eari d ei p aram etri .. 48
2.2. 5 Nai ve Ba yes Cl assi fi er, co n aggi orn am ento gui d ato dei paramet ri d el mo d ell o assum en do an d amenti lin eari d ei p aram etri, app licat o a imm agi ni gi à di vis e p er il b ack groun d ... 50
2.2. 6 Nai ve Ba yes Cl assi fi er, co n u pd ate aut omat ico d el mod ello ad o gni frame analizzat o ... 52
2.2. 7 Nai ve Ba yes Cl assi fi er, co n u pd ate aut omat ico d el mod ello ad o gni frame analizzat o, app licat o a imm agini gi à divi se p er il
back gro und ... 53
2.3 Alg oritmi p er il migli ora men to d ell a seg men ta zion e ... 53
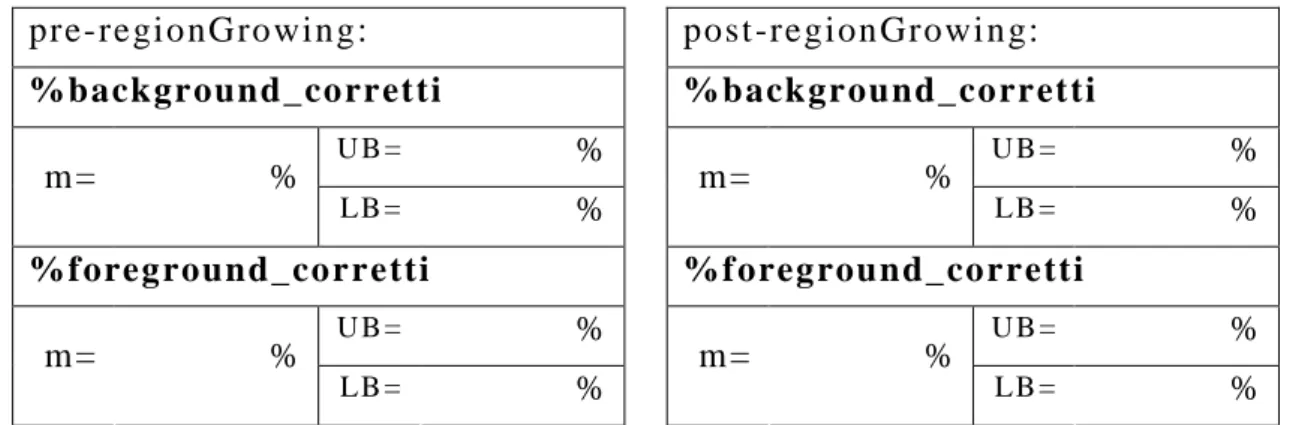
2.3. 1 L’al gorit mo “regi onGro win g” ... 53
2.4 Metodi di valu ta zion e d egli al go ritmi ... 55
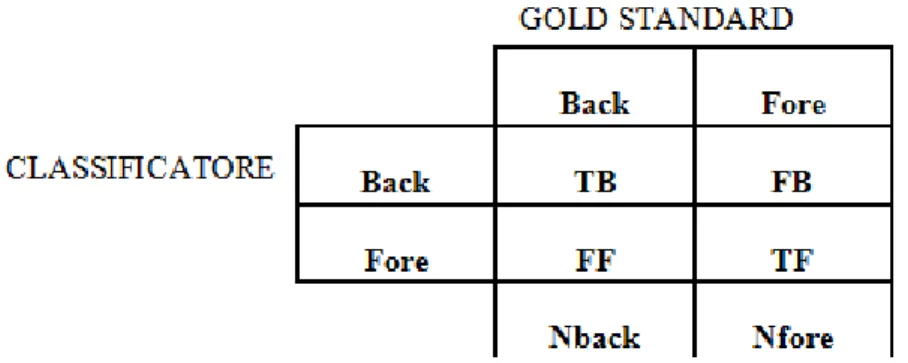
2.4. 1 Gold -St and ard e p aramet ri p er la v alutazio n e ... 55
3. Risultati... 66
3.1 T abelle riassun tive e is tog ra mmi ... 73
3.1. 1 Al go ritm o S DB ... 74 3.1. 2 Al go ritm o NBC ... 75 3.1. 3 Al go ritm o NBCB... 76 3.1. 4 Al go ritm o NBCA G... 77 3.1. 5 Al go ritm o NBCA G , B ... 78 3.1. 6 Al go ritm o NBCA A... 79 3.1. 7 Al go ritm o NBCA A , B ... 80
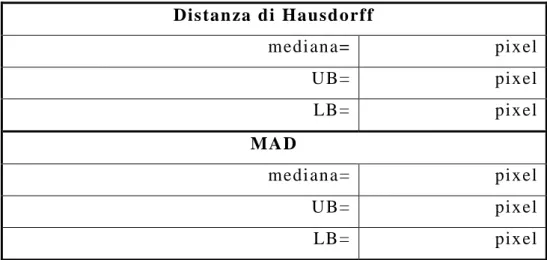
3.2 Dis tan za di Hau sdorff ... 81
4. Discussione dei risultati... 83
4.1 L ’al go ri tmo So ttrazion e/Di visi one e Sogli atu ra ... 83
4.2 Alg oritmi con a ggio rna men to au to ma tico d el cla ssifi cato re ... 84
4.3 Effi ca cia d ell ’al goritmo regi on Gro wing ... 86
4.4 Il risul ta to mi gl iore ... 88
4.5 Con testu ali zzazi one d el p res ente lav oro di tesi ... 92
Conclusioni ... 99
Introduzione
Un sist em a p er l a Motio n Capt ure è u n sist ema ch e h a lo scop o di fo rni re u na rap pres entazio ne m at ematica qu anti tat iv a d el m ovim ento real e, t al e d a rend ere il mo vim ento stesso fruibil e com e i nput per successi ve el ab orazi oni. An ch e s e l e o rigini s ono piutt osto anti ch e, sop rat tutto n egli ult imi decen ni l e t ecni ch e di Moti on C apt ure h ann o con os ciut o u n gran d e s vilu ppo . In p arti colare, l ’an alisi d el cammin o i n ambit o cli nico h a ri cop erto un ruol o s empre più impo rt ant e si a p er l a diagnos i di malat tie muscolo -s ch el etri ch e che p er la qu anti ficazio ne dei b en efi ci ott en uti dall e t erapi e riabili tativ e. R ecent em ent e, div ersi studi hanno ino ltre evid enziato com e il cammin o in am bi ent e acqu ati co poss a risul tare p articol arm ent e uti le nell ’ambit o di un pro cess o riabilit ati vo. S areb b e dun qu e impo rt ant e ess ere in grado di forni re un a caratt erizzazion e bi omeccani ca d el cam mino um an o an che in acqu a, per ot tenere u na più mirata p rescrizio ne di qu est ’atti vit à com e p art e di una t erapi a ri ab ilit ativ a. La m aggio r part e d ell e tecni ch e M otio n Capt ure p rev ed e tu ttavi a ad o ggi stru ment azio ni che di fficilm ent e poss ono ess ere i mpi egat e anche i n ambi ent e acqu ati co. Un a possi bil e soluzio ne a qu esto p robl em a pu ò tutt avi a scat urire d all a nuov a bran ca dell a M arkerl ess M otion C aptu re. I p u nti di fo rza d i qu este nu ov e tecni ch e ri gu ardano la necessit à di u na strum ent azio ne pi ù ridott a e men o sp ecifi ca e, so prattut to, l a to tal e assenza di disp ositi vi appl icati al co rpo d el so ggett o, rend end o in qu est o mod o po ssib ile lo studi o di un movim ento n atu rale e li bero d a cost riz ioni. Ad o ggi, di vers i meto di sono stat i p rop osti per esegui re l’an ali s i del m ovim en to co n tecni ca mark erl es s. Uno d ei più diffus i è u n m et odo mod el -b as ed ch e sfrutt a il mat chin g sui dat i sp eri ment ali di u n mo dell o d el so ggetto , d ove i dat i sperim ent ali as sum ono l a forma t rid imen sion al e di vis ual h ull (app ros simazi on e d el volum e d i sp azio occup at o d al so gget to in u n istante). Il p rimo p ass o d ell e el abo razioni in qu est o ti po di t ecnica
con sist e n el ri con osci mento aut omati co d el so gget to ri spet to al back gro und , in t utti i vid eo p ro veni enti dall e t el ecam ere sin cronizzat e ch e ri pren don o il movim ent o. Questo tipo di ri conos ci ment o del so ggett o è d etto s egmenta zion e, e prod uce u na bin arizzazi one d ell e immagini in in gress o allo s cop o di ott en ere l e sagom e (silho u ett e) ch e, ret ro proi ett ate n ello spazi o a parti re dai piani d ell e t el ecam ere, perm etton o la creazione d el vis ual h ull. La s egment azione d ell e immagini è u n p as s o di fo nd ament ale i mportanza per garantire u n a buon a ricost ruzio ne del vi su al hul l e quindi , in ult ima an alisi , un’accurat a ri cos tru zione d ell a cin em ati ca d el so ggetto. Anche se vi è un cres cent e int eres s e, ancora po chi stu d i son o s tat i ad o ggi effettu ati sull’acq uisizio ne d el cammin o in acq u a con tecn ica m ark erl es s e, con segu ent em ent e, rel ativ am ent e p ochi strum enti sp eci fi ci sono stati messi a p unt o p er questo p arti col are ambito app licati vo. In qu esto lav oro di tesi s on o du nqu e stati s vi lupp ati e caratt eriz zati s ett e al gorit mi di s egm ent azion e, n ati sp ecifi cam ent e n ell ’o ttica d ell ’anal isi del cammin o in acq ua. In parti col are, u no d egli o bbi etti vi s arà q uel lo
di most rare com e vari a la q ualità d ell a segmentazio ne
aggiun gendo/ rim uov end o p articol ari grad i di compl ess ità all ’al gorit mo di segmentazi on e. Un ulterio re al goritm o per il post -p ro ces sin g d ell e immagini bin arizz ate, i l r egi onGrowi ng, s arà in oltre i mpiegat o, val utando an ch e i n questo cas o gl i effetti in dotti sul la qu alità d ell a segm en tazi on e.
Nel C apito lo 1, Acq uisir e il moviment o, sarà d at a un a d efin izione più p recis a d ell a Motio n C aptu re, d iscu tendo b revem en te an ch e l’evol uzion e d ell e tecni ch e d alle o ri g ini sto riche fin o allo stat o dell ’art e. Un a p ano rami ca dell e p rin ci pali tecni ch e di Mo tio n Capt ure allo st ato d ell ’art e sarà d unq ue p ro pos ta, fino a d es criv ere più in dett agl io la nu ov a Mark erl es s Motio n Capt ure. Si co nclud erà in fin e il capitol o ri co rd and o qu ali si ano i pri ncip ali v an tag gi o fferti dall ’ambi ent e acq uat ico n ell’am bito d el p ro cesso ri ab ilit ativ o.
Il C ap itol o 2, Ma ter iali e Met odi, p uò essere idealm en te di v iso in tre p arti . Nell a p ri ma p arte del capi to lo si fornirà un a d es crizi on e dett agl iat a del m at eriale impi egat o n el pres ent e l av oro di t esi. Nell a
secon da p arte d el capitol o si d es criv eran no i n d ett aglio i s ett e
al gorit mi di s eg ment azio ne i mpl ement ati e l ’al go ritmo di
mi glio ramento d ell a segm ent azion e p os t-p ro cessin g regio n Growi ng. Nel l’u ltim a p arte del capito lo si defin irann o in fin e i criteri impiegati per val ut are l a qu alità d ell a s egm entazione ott en ut a con i d iv ers i al gorit mi, d efin en do da un l ato qu ali si ano i gol d-st and ard ass unti e dall ’alt ro q uali p aramet ri si an o st ati co n siderati per l e v al ut azioni . In parti col are, saran no prin ci pal mente v alut at e le percentu ali di pix el d el
back gro und e d el fo regroun d ri co n osci ut e corrett amente n ell e
segm en tazi oni.
Il Capitol o 3, Ri sult ati, ri po rt a i risu ltati ottenuti , most rand o per o gni al go ritmo i valori d ei p aramet ri consid erati p er l a valutazio n e dell a q uali tà d ell a s egm ent azio ne, si a in fo rm a sint eti ca ch e p er vi a grafi ca, con l ’us o di isto grammi e b ox -pl ot. Sarann o inolt re ri port ati i n questa sezio n e gli esiti dei tes t st atisti ci ANOVA es eguiti s ui div ersi risul tat i, e defin iti al la fin e del C apit olo 2.
Nel Capitol o 4 , Dis cussio ne d ei ri sult ati, si di scuterann o al cu ni d ei risul tat i ott en uti e mostrati al C apitol o 3, cercando di mo t ivarli. S i discut erà in olt re s u qual e t ra gli al go ritmi impl em ent ati forni sca i risul tat i compl es siv am ent e mi glio ri, cercand o in fi ne di rappo rt are questo lavo ro di t esi all a l ett erat ura sull ’argom en to.
1.
Acquisire il movimento
1.1 Motion Capture: definizione e ambiti applicativi
Se p arl iam o di “m otion captu re” o, come s pesso si abb revi a, di “MoC ap ”, un a d efin izione piutt ost o com une e l argam ent e accettata è quella fo rni ta da M en ach e n el su o lib ro [1]: “Mo tion C ap t ure is t he pro cess o f reco rd in g a liv e m otio n ev ent an d t ransl ati n g it i n to us able math em ati cal terms b y tracki n g a num ber o f k e y p oints i n s pace ov er time and combin in g them obt aini n g a sin gl e 3D rep res ent atio n o f perform an ce”.
In accordo con la d efinizio ne app en a d at a, s copo della moti o n capt ure è dun qu e q uello d i “di git alizzare” il movim ento di un so ggetto, fo rn end o d el movi ment o real e u n a rapp resent azion e m at ematica quantit ativ a ch e ren da i l mo vim ento st esso facil mente frui b ile com e input p er s uccessi vi studi e s uccessi ve el abo razioni . Tale caratt eri sti ca rend e le t ecni ch e di motion captu re util i e int eress anti p er un gran d e ven taglio di appl icaz ioni, e non sol o p er studi di bi om eccani ca [2], [3], ma an ch e ad es empi o p er s co pi d i s orvegl ianza, n ell a realtà virt ual e o nel ci nema.
Tra i v ari usi d ell e t ecnolo gi e p er l a motion capt ure, ri co rdi amo inn anzitutt o qu elli i n ambi to clini co e i n ambi to sp orti vo . Per q u anto ri gu ard a gli stu di cli nici , le tecniche di motion captu re sono necess ari e per p erveni re ad una co nos cenz a accu rata del la cin em ati ca del so ggett o, p er pot er diagnos ticare i probl emi di l ocomoz ion e d ei pazi enti . Per q uanto ri guard a l ’ambit o spo rtivo , l e t ecni ch e MoC ap ven gon o com un em en te utilizzat e p er regi strare il movim en to al fin e di indivi du are eventu ali raffin am ent i d a att u are p er il mi glio ramento dell a perform an ce spo rtiv a nel su o com plesso [2].
Un altro am bito di u tilizzo dell e t ecnol o gi e d i motio n cap tu re è qu ello dell a si cu rezz a: le t ecni ch e MoC ap po s sono in fatti ess ere i mpiegat e nell a p ro get tazio ne di sist emi di so rv eglianz a int elli genti. A titol o di
es empi o, s ist emi di MoCap so no stati ut ilizzati p er il ri con o scim ent o
dell ’and at ura n el cammino d i un so ggett o com e s egnale di
ricono scimento b iom etrico. È stat o in fatt i pro post o [4] che l ’and at ura sia un a caratt eri sti ca s uffi ci ent em ent e distintiv a d a p ermett ere l a discrimi nazi on e t ra s o ggetti div ersi [2].
Citiam o in fin e, a co ncl usio ne di qu est a brev e carrell ata di esemp i, un alt ro impo rt ant e cam po d i app licazio ne p er q ues te t ecnol o gi e: l a real tà virt ual e. Grazi e all e tecnolo gi e MoC ap, infatti, ess en do in grado di tradu rre il mo vim ento um ano i n mo delli di git ali com p rensib ili, ev ent ual mente, anch e dalle m acchin e, è pos sibil e in fin e per ut enti umani int eragire con con tenuti d i git ali i n tem po real e: q uest o as pet to può risult are molto u tile ad es empi o nella cost ruzio n e di sim ul azioni di all en am ento , o p er eseguire test di p ercet tibilit à v isiv a, n ell e terapie di biofeed back op pu re an cora per don are in general e u n m ovim ento nat ural e a p erso nag gi creati in terament e al com put er (caratteristi ca, questa, m olto app rezzat a e u tilizzat a mi glio rare i ren derin g d egli effetti sp ecial i in TV, n ei film e n ei v id eo games [3] [5]).
Un a volt a i ntrodot to cos a si a l a moti on capt ure ed elencati al cun i tra i molti po ssib ili ambi ti ap pli cat ivi, an di amo a d es criv ere nel pro ssimo paragrafo q u ali si an o, allo st at o d ell ’arte, l e p ri nci pali t ecniche di acquis izion e del mo v iment o.
1.2 L’acquisizione del movimento allo stato dell’arte
L’i nteress e per l ’an alisi d el m ovim ent o in generale e, i n p art icolare, per l’an ali si d el cam mino, è in realt à un interess e molt o anti co, che si rifà ai temp i dell ’antica Greci a, e an che s e la su a evoluz ion e pas sa att ravers o i n omi d ei più grand i s cienziat i, fil oso fi e t eo ri ci d i sem pre, da Arist otele (384 -322 a.C. ) a Thom as Yo un g (17 73-182 9 ), fi no ai gi orni no stri [6], è stat a in parti col are l’in venzion e d ell a foto grafi a nell ’8 00 a co ntri bui re all ’evol uzion e di ciò che o ggi è no to com e motion capt ure [3]. In parti col are, è piut t osto com un e l’i denti ficazio ne nel lavo ro di Eti en n e J ul es Mare y (1 830 -19 04 ) e Eadweard Mu yb rid ge (18 30 -19 04 ) un p as so fo nd ament ale p er lo svil upp o del la motion
captu re, fin o all a su a ev oluzio ne a com e la cono sciam o o ggi [2], [3]: fu infatti grazie all’in venzi on e del cron ofoto grafo ad o pera di Mare y (Fi gu ra 1.1 ) che fu possibil e p er M u ybrid ge, negli anni s uccessiv i, con tinu are l ’an alisi sul mod o in cu i sia gli anim ali ch e gli umani si muov ev an o, s cattan do fo to grafi e a u mani e anim ali n ell’atto di com piere s vari at e at tivit à [3]. Qu esti esp eri menti di M u yb rid ge fu ro no coll ezio nati , e son o div ent ati fam osi con i nomi di Animal L oco mot ion [7] e di Th e Hu man Figur e in Mot ion . [8 ] (Fi gu ra 1 .2 ).
Fi gura 1. 1 I l f uci l e f ot ograf i co di M arey, 1 8 82
Dop o il l avo ro di M are y e M u yb rid ge, n el cit are qu ali altri con tri buti abb iano p ermesso l ’evo luzion e d ell e t ecni ch e di m otio n capt ure d a allo ra fi no ad o gg i, è d ’o bbli go menzion are an ch e il lav oro di G. J ohansso n ch e, nel 197 3, n ei s uoi Movi n g Li ght Displ a y Ex periments [9] uti lizzò dei pi ccoli m arker ri flet tenti app licati all e gi unt ure di so gget ti um ani p er regi strare il l oro m o vimento. L’o bi ettiv o del lavo ro di J oh anss on era quell o di ess ere in grado di identificare mo vim enti noti sol o a parti re dal l’an alis i dell e t rai ett orie dei m ark er [2], [3], il ch e ci avvi cin a s emp re più a q uel la ch e è la
mod ern a an alisi del mo vim ent o, ad es em pio, tram ite stereofoto gramm et ri a.
Fi gura 1. 2 E. M uybri d ge. At hl et e. A scendi ng a St ai rway [ 8]
Ad o ggi , gen eralm ente parl an do, pos siamo div id ere l e t ecn ich e p er l’an alisi d el mo vimento in tre grandi b ranch e, a s econd a d ell e fi nali tà dall 'analisi st ess a: anali si del movim ent o faccial e e ri con os ci ment o dei volti, anali si e ri con osci mento d ell a gest ualit à, anal isi d el m ovim ento del corpo. La prim a b ran ca ri gu ard a i l ri co nos cim ent o d ei volt i in un’i mmagin e (solit ament e in con giu nzio ne con si stemi di si cu rezz a), oppu re può ess ere finalizz ata all a creaz ion e di mod elli di volti ch e ven gano uti lizzati s uccessiv am ent e n ell e an imazi oni. L’an alisi del la gest ualit à pu ò ess ere intesa co me un ri co nos cim ento d ella ges tuali tà o di en tramb e l e m ani con l e b racci a o an che d ell e so le m ani , al fi n e di pot er ut ilizzare qu es to tipo d i lin guaggi o del co rpo com e in p ut per u na com uni cazi on e uom o-m acchin a. In fi n e, l’an ali si del movi ment o del
co rpo nella su a gl ob alit à, co n un livel lo di d ettagl io ch e
ten denzialm en te es clud e i mo vimenti p iù fi ni (co me ad es empi o l e esp ressi oni d el v olt o), s i ri du ce fo nd ament alm ent e all a st ima d ell a pos a d el so ggetto i stan te p er ist ant e [2], ass unto un mo d ello che des criv a il so ggetto stes so.
In bi om eccani ca e n ell e appli cazio ni cli ni ch e e s p orti ve, è prin ci pal mente l ’ulti ma bran ca d es critt a qu ell a d i m aggio r interess e, poi ch é è grazi e a q u esto tip o di an ali si che sarà po i po ssib ile studi are la cin em ati ca del s o ggetto . M aggi ori dett agl i v errann o d unqu e di seguito fo rni ti su lle prin ci pal i t ecnich e MoCap rel ati ve a qu esto tip o di an alisi .
Allo st ato del l’arte, le tecni che M oCap esist ent i per l ’anal isi del la cin em ati ca di un so ggetto si p oss ono co ncettu alm en te div id ere in du e grandi cat ego ri e: le tecni ch e ch e si b as ano s u app ro cci non ottici , e quelle che s frutt ano prin ci pi o ttici [3].
Per le tecni che “n on ott iche”, pos si amo ind ivid uare t re ap procci prin ci pal i: app ro cci o el ett rom eccanico, el ett rom agn eti co e app ro ccio inerzial e.
Per i m eto di otti ci, distin gui amo p rin cip alm ent e t ra l e t ecni che ch e si avv al gon o d ell ’uti lizzo di m ark er e l e t ecniche mark erl ess.
1.2. 1 I metodi n on o tti ci
Nel l’ambi to d ei si st emi Mo Cap no n ott ici, uno t ra i p rimi app ro cci implementati fu q uel lo el ett rom eccani co [10]: i sistemi b as ati s u qu est o tipo di app ro ccio co nsisto no, ad o ggi , in speci ali tut e in doss abili ch e fo rmano un a so rt a di “esos ch el et ro ” p er il so ggetto i n movim ento , munit e di dis posit iv i di misura in al cun i punti chi av e (Fi gu ra 1 .3 ). I
sistemi di mi sura pres enti s ono gen eralment e costi tuiti d a
pot enziom et ri uniti a s peci ali dis posi tivi scorrevo li (sli ding rods ) ch e misurano gli s post amenti tra i gi unti dell a t ut a in doss abi le, e da sen so ri (q uali ad es empio elett ro gon iom etri [11]) in grado di misurare gl i an go li t ra i s egm enti adi acent i dell ’eso schel et ro . Quan do il so ggett o si m uov e, l ’azion e vi ene ril ev at a attrav ers o pi ccoli cambi am enti di t ens ion e ai cap i dei p o tenziom et ri. Le tut e ad o ggi poss ono i nt egrare an ch e s ens ori di ti po i nerzial e e fo rnis co n o ris ult ati accurati (l a n uov a t uta-esos ch el et ro Gypsy 7 mis ura gli an goli t ra i segm en ti d ell ’eso schel et ro co n u n a ris oluzion e di 0.1 25 gradi ) m a con dizion an o il mov iment o perch é son o pes ant i e non p ermettono un a piena li bert à di azi o ne: il p rin cip al e p ro blem a di q ueste t ute è infatti
pro pri o il lo ro an dare a li mitare o com unq ue a con diz ion are il movim ent o ch e si st a an alizz and o [2].
Fi gura 1. 3 Tut a i n dos sabi l e M oCap el et t rom eccani ca (a si ni st ra ) e magnet i ca (a dest ra)
Nel la M oCap b as at a su app ro ccio el ettrom agnetico, l a li bert à di movim ent o d el so g gett o mi gl iora. Le tute ind oss abili realizzat e risp ett o a qu est o ti po di ap pro cci o (Fi gura 1. 3) p res ent an o sen so ri posizio nat i in pu n ti chi av e d el corpo, dov e o gni s enso re è fon dam entalment e costitui to da u n in si eme di bobi ne o ri ent ate seco ndo le tre di rezi oni d ello spazio [12]. Il funzi onamento d el sist em a prev ed e inolt re la gen erazio n e di un camp o m agn eti co est erno p er cu i all a fin e sia po ssibil e, incro ci and o i dati sul flus so d el campo magneti co att ravers o ci as cu na dell e b obin e cost ituenti i s ens ori, ricos truir e posizio ne e o rient am ent o di ci as cun s enso re.
Le t ute el ett rom agnetich e così costitu ite sono più com od e e l eggere di quelle el ett rom eccaniche [2], pert ant o i movim en ti d el so ggett o ven gon o m en o con di zionati .
Il p robl em a p rin ci pale l egato a qu est i sis temi è la diffi colt à d ’impi ego al di fuo ri d ell ’ambi ent e con troll ato d i l abo rato rio , po iché in pres enz a di mat eriali ferromagnetici i l camp o vi ene di sto rto e le m isu re perd ono in accu rat ezza [11]. In fin e, in qu esto cas o vi è un a limit azion e risp ett o all ’acq uisizio ne di movim enti t rop po ampi, data l a n ecess ità per i sen so ri di riman ere semp re all ’int erno d ello sp azio p ervaso dal camp o
magneti co imp osto dal gen erat ore [5]. Per q uant o ri gu arda l’accu ratezz a, è p o ssibil e con l e t ecniche odi ern e rico strui re l a posizio ne d ei m arker m agn eti ci co n u n erro re m assim o di circa 2mm [13].
Un a t erza cat ego ri a di si stemi M oCap n on o tti ci è qu ell a ch e utilizza sen so ri inerzi ali: l’i dea all a b as e di qu esti sist emi è qu ell a di poter ricost rui re il mo vi ment o d el so ggetto a p art ire dalla mi sura delle accel erazio ni in gio co. Qu and o si parl a di senso ri in erziali, ci si riferis ce comu nemen te ad accelerom et ri e giros cop i.
L’accel erom etro è u no strumento in grad o di tradu rre un ’accelerazio ne lineare i n un a gran d ezza el ett ri ca. Il dis positi vo è fon d amen talm ent e cost ituit o da u n a mass a no ta, lib era di muov ersi all’int erno d ell o strum ento per effett o d ell e forz e i nerzi ali: l o s post am ent o com piuto dall a m ass a è poi l egato all a forz a (e quind i al l’accel erazi one) p er mezzo di un a rel azion e not a, e v iene rilevat o att rav erso l’effett o cap acit ivo o grazi e all’uso di est ensim etri . Ad o ggi esis ton o accel erom etri mon o-, bi - e t riassi ali ch e, grazie alla tecnolo g ia M EMS (Mi cro El ectro -M echan ical S yst em s) p o sson o ess ere int egrati su u n uni co chip [14]. Il grado di accu ratezz a d i questo ti po di accelerom etro con t ecnolo gi a M EM S può arriv are fi no a 25µ g (co n g accelerazion e di gravit à) [15].
Il gi ro scopi o è un disp ositi vo i n grado di trad urre u na vel ocità an gol are i n u na grandezz a elettri ca s econdo un a rel azion e not a: l a tipolo gi a più co mu ne si b as a sull a legge di Co rio lis. Grazie all a tecnol o gi a MEMS , anch e d el gi ros co pio esist ono attu alm en te versioni mono - o tri as siali int egrate su un u ni co chip. Il grad o di accu rat ezza di un gi ro scopi o di qu esto ti po può arriv are fino a 0 .05 °/s [15].
Il p rob lem a i ntrins ecam ent e l egat o al l a MoC ap b as ata s u senso ri inerzial i è l a sensib ilità di q u est e tecni ch e ri sp etto a offs et e deriv e, dat o ch e p er ri con dursi a sp ost am enti e vel ocità a p art i re d all e accel erazio ni o cco rre effettu are p ro cessi di i nt egrazio ne n um eri ca. Per questo m otiv o, ad o ggi q uesti di spo siti vi v en gono int egrati in uni tà
multi-senso re, i n modo d a po ter s frutt are l a rid on d anz a di
Non ost ant e tu tte le t ecni ch e MoC ap app ena pres ent at e p erm et tan o, ad o ggi, u na bu on a accu ratezza n ell a ri co struzi on e d ell a pos i zione d ei mark er (o d ell a confi gurazio ne d ell ’esos chel et ro ), ci ò n on garanti sce si riesca a otten ere un’alt rett anto accu rat a stim a dell a ci nem ati ca art icolare. Ad es emp io, un art efatt o in grado di in fi ci are l’accu ratezza di qu est e t ecnich e è l’art efatt o d a tessut i molli. M aggio ri d ettagl i su questo tipo di art efat to s aran no fo rn iti n el prossim o p aragrafo.
1.2. 2 La s tereofo tog ra mmetria
I sis temi MoC ap otti ci s ono sist emi ch e s i basano s ull ’utilizzo di un a o di un s et di telecam ere sin cronizzat e per ricost rui re in o gn i istant e l a pos a 3 D di u n s o gget to in mov imento [16].
Concett ualment e, p ossi amo cl as sificare i si st emi MoC ap otti ci a secon da d el n umero di punti di vis ta assunti d uran te l ’acq uisizion e (sist emi m ono culari o multi -vi ew) e a s econ da d ell’impi ego o meno di mark er (si ano q uesti attivi o p assi vi ), di stin guendo d unq ue d ue tipi di app ro ccio: il m ark er-b as ed e il m ark erl ess. Nei sist emi m arker-based l’ob iet tivo è ri co struire la cin em ati ca dei s egm en ti oss ei att ravers o l’in divid u azion e d ella t raietto ria 3D dei m ark er (picco l i o ggetti app licati al la sup erfici e co rpo rea d el s o ggetto i n mo vim ento ), m en tre le t ecni ch e m ark erless mi rano a est rarre i p aram etri rel ativi al movim ent o a parti re d a sil hou ett es o alt re caratt eri sti ch e d el so ggetto nell e i mmagini (co m e ad es em pio i cont o rni ) [16] .
In qu est o paragrafo ci occup eremo d el la descrizio ne d ell e tecn iche multi-vi ew e mark er-based, m ent re maggio ri d ett agli s ull a tecn ica mark erl es s v erran no fo rniti in seguit o, nella sezio n e 1 .3.
Fi gura 1. 4 Ri cost ruzi o ne del l a posi zi one del punt o P, not e l e sue pr oi ezi oni P1 e P 2 sui pi ani pri n ci pal i del l e t el ecamer e e l e posi zi oni N 1 e N 2 del
Il fu nzion am ento dell e tecni ch e mark er-based si bas a fon dam entalment e s ul p rin cipi o di trian gol azion e: q u and o almen o d ue tel ecam ere rip rendo no co nt empo ran eamente u n punt o del lo s pazio 3 D allo ra è pos sibil e, a partire d all e immagi ni fo rm at esi sui piani prin ci pal i d ell e t el ecam ere, ricost rui re la posizi on e di q uel pun to tramit e s empli ci retroproiezi oni (Fi gura 1.4 ). La t ecni ca Mo Cap o tti ca mark er-b as ed di qu esto tipo è d ett a anch e st ereo fot o grammet ria, do ve il p refis so s tereo- di scend e prop rio d al p rinci pio ap p en a esp os to.
Per ri co strui re la posizio ne di un pu nto t ramit e t ri an gol azion e è necess ari o av er defi nito a p rio ri un sis tem a di ri ferim ent o glo bal e.
Occo rre inol tre ch e i p aramet ri d ell ’int ero sist em a
stereofoto gramm et ri co si ano n oti, si a i paramet ri est erni (p osizion e e ori ent am ent o d ei pi ani prin cip ali delle tel ecamere) che i paramet ri interni (co me lun ghezz a fo cal e, co ordi nate d el punt o no dale, co effi ci enti di disto rsion e d ell e t el ecamere). In altri t ermi ni, prim a di pot er effettu are l e acquisizi oni è necess ari o cali brare l o spazi o all ’int erno d el q uale verrà es eguito il m ov iment o.
La calib razion e avvi en e di no rma in d ue fasi. Nel la pri ma fas e vi en e acquis ito un o ggett o di calib razi on e com posto d a 3 assi ort o gonali con mark er at taccati i n posizio ni n ot e, all o sco po di defin ire il sistema di riferim ent o glob al e e di ott en ere p osizi one e orientamento dei pi ani dell e t el ecam ere. Nel la s econ da fas e d ell a calib razi on e un a b arra ri gid a (wan d) con m ark er att accati i n p osizio n i not e vi ene moss a l un go le 3 direzioni del lo sp azio all ’int erno d el volum e di calib razione p er ottenere i p aram et ri i nterni d ell e t el ecam ere.
Un a ti pico es emp io di archi tet tura di un sistema st ereofoto gramm etrico è m ost rat o i n Fi gura 1.5.
I m ark er utilizz ati i n st ereo fo to gramm et ria p osso no es sere d i du e ti pi: pas sivi e attivi . I m arker p as sivi s ono s empli cem ent e pi ccol e s ferett e leggere uni fo rm em ente ri cop ert e d a m at eri al e rifl ett ente, ment re i mark er atti vi son o v eri e p ro pri LED in grado di em ett ere lu ce prop ria nell o s pet tro in fraro s so.
I s en so ri opto el ett ro nici uti lizzati son o tel ecam ere ch e lav orano n ell o spet tro in fraross o e int egrano disp os itivi p er la ril ev azione e trasduzi on e d el s egnal e lu mino so in u n segn al e el ett ri co , quali ad
es empi o i s ens ori CCD (ch arged cou pl ed d evi ce) e CMOS
(compl em ent ar y m et al ox ide s emi co ndu ctor). In di pend ent em ente d all a tecnol o gi a, i senso ri ven gono s olit am ente o rganizzati in mat rici di pix el s ul pi ano im magi n e d ell a t el ecam era [17].
Nel caso in cu i il sistem a lav ori con m ark er p ass ivi, l e tel ecamere so no inolt re cost rui te in modo da emet tere ess e st ess e fas ci di luce infraro ss a. Dat o ch e i m arker p ass ivi sono ri cop erti d a mat eri al e riflett ente, il segn al e lumin oso d i rito rn o pro veni ent e d a qu esti s arà molto più int ens o ri spet to a un ’eventu al e riflessio ne di lu ce da p arte del b ack grou nd, p ermett end o co sì un a facil e l ocalizzazi on e d ei m ark er. Im po st and o infin e u n’ad egu at a so gli a di luminos ità p er le t elecam ere,
la prob abili tà che v en gan o erro neament e ri co nos ciu ti segn ali
pro veni enti d a p ell e o v estiti d el so gget to si ridu ce drasti cam ente [18]. Nel cas o in cui v en gano impi egati mark er attivi non è n ecess ari o si an o le tel ecamere a ill umin are lo sp azio, ess end o gli stessi mark er a em ett ere un s egnal e lumino so. Si no ti ch e co n qu est a s econd a modali tà di acquisizi on e si h a un mi no r con sumo di po tenza, d ato ch e il segn al e lumino so deve p erco rrere l a m et à d ell o spazio p er in ci dere sul p iano immagin e dell a t elecam era, risp etto al caso in cui si impi egan o marker pas sivi. Un alt ro v an taggio l egat o ai m arker attiv i ri gu ard a u na m i glio r tracci abili tà d egli s tessi ri sp etto ai m ark er p assi vi. Qu est a mi glio r tracci abili tà è d ov uta all a p ossi bilit à di div ersi ficare i tempi di attiv azio ne e l e frequenze di pul sazi on e d ei LED: pot en do si basare
an ch e su qu est i paramet ri, il sist em a ri conos ce più facilm ent e ci as cu n mark er [19].
Non ost ant e qu est e con sid erazio ni posit ive sui m arker atti vi, viene an co ra tend enzi alm ente p referito l ’u so dei si st emi a mark er p assi vi, dat o ch e in molti cas i è an co ra necess ario il wirin g per l’alim entazio ne dei mark er atti vi, i l ch e v a a lim itare il movim en to del so g gett o [17] [3]. Con l’avv ent o del wi rel es s, t utt avi a, an ch e q uesto pro blem a st a scom paren do.
Tra tut ti i si stemi MoCap vi sti fino ra, q u elli ch e h an n o ris co sso maggio r su ccesso s o no i sist emi otti ci. I prin ci pal i moti vi d el success o ri gu ard an o inn anzit utto il rid otto in g ombro sul so ggetto [3], e la possi bilit à di acq uisi re, co n op portuni s et up, anch e movim ent i ampi [5] com e il cammi no, la co rs a, il b allo . Un alt ro im po rt ant e v an taggio di questo t ipo di M oC ap sull e alt re t ecni ch e ri gu ard a l a fl essi b ilità nella scelt a d ell a p osizio n e e d el n um ero d ei mark er a s eco nd a d el tipo di acquis izion e [5], anche s e nu mero si prot oco lli sul posizio nament o d ei mark er s ono st ati s vilup pat i (com e il SAF Lo , il VC M, il CAST).
In fin e, i sis temi otti ci p oss ono raggi un gere frequenze di
campio namento t end enzi alm ent e più el ev at e ris petto alle alt re tecni ch e [5], perm ett end o l’an alisi anche d ei mo vi menti rapi di, e p res entano u na buon a accurat ezza: nei sist emi m ark er-bas ed a mark er p assivi, ad es empi o, l ’erro re di ri co st ruzion e della posizio ne d ei mark er è dell ’o rdi ne d ei m m o inferio re.
Non ost ant e la p opo l ari tà, l’ap proccio o tt ico p res ent a al cu ne i mportanti limitazi oni ch e devo no ess ere consi derat e [20].
In n anzit utto , an che se l ’in gomb ro è lim itato s e com parato agli alt ri sistemi, l a p res enz a di m ark er att accati all a p ell e p uò i nfl uenz are i l movim ent o d el so ggett o. Ess en do i nolt re i m ark er molt o piccoli , è possi bil e che i n d etermin at e fasi d el movim ent o un m ark er ven ga nas co sto alle t el ecamere, facen do così p erdere tem po raneam ent e la su a tracci a. In co rrisp ond enz a di questi eventi capit a an che che l e traiet to rie di m ark er molto vi cini v en gano con fu se. Questi pro blemi poss ono tutt avi a es sere p arzi alm ent e s uperati co n l ’utiliz zo di u n
maggio r num ero di t el ecam ere [19] e un ad egu at o pos izion am ent o dei mark er.
Altri sv ant aggi ri gu ard ano il fatto ch e il posizio nam en to d ei mark er è disp end ioso i n t ermi ni di t empo , no n co m plet am ent e rip etibi le [21], e la pres enza di t es suti molli t ra os sa e marker caus a u n mot o rel ativo che introdu ce un not ev ol e artefatto n ell a mis ura, chiamat o in gergo ATM , “art efat to d a tes suto molle” [22]. Gli erro ri indo tti d agli artefatt i da tess uto m oll e son o erro ri si stemat ici , temp o-vari anti , v ariabili d a perso na a pers on a e vari ab ili a s econd a del punt o del co rp o di cui si an alizza il m ovim ento. Qu est i erro ri poss ono arriv are ad ess ere dell ’o rdi ne di alcuni cm, ch e si rip ercuot ono in errori di di versi gradi sul cal co lo d egl i an goli arti col ari. Dat o infin e ch e il con ten uto in freq uenza degli erro ri d a ATM è lo stesso d el m ovim ent o ch e vi en e acquis ito, l’effetto d egli errori non può ess ere att en uato con tecni ch e di filtraggio s enza p erdit a di in fo rm azion e u tile [23].
Per o ttenere in fin e dati d i alt a qu alit à con l e t ecni ch e marker-based, occo rre es egu ire il movim ento in un ambi ent e con troll ato [24], ten denzialm en te un ambi ent e ind oo r e con u n vo lum e di acquisizio ne limitat o, m ent re st ru menti com e ad es em pio i sen so ri in erzi al i posso no ess ere utilizzati an che al di fuo ri d ei lab orato ri, e p er sessioni di acquis izion e an ch e p rolu n gat e (anche di d ivers e o re).
An ch e se num eros e soluzioni son o stat e prop ost e in l etteratu ra per sup erare qu est e l imi tazioni , d iv ers i asp etti rim an go no an co ra irrisol ti. Un int eres se s emp re maggi ore n el tro vare v ali de alt ernati v e a questi meto di sta d unq ue emergen do, e la nuov a area di ri cerca sull a Mark erl es s M otio n C apt ure ne è un esem p io [3].
1.3 La tecnica markerless
La p ossi bilit à di ricostruire il m ovim ent o umano a parti re u nicam ent e da s equ enz e di im m agi ni è un argoment o ch e, n egli ultim i ven t’an ni, ha ris co sso un n otevol e in teress e nell a co munit à scienti fi ca, sop rat tutto grazi e all ’am pio s pettro di ap pli cazi oni ch e s areb be possi bil e sv ilup pare co n q uesta cap acit à. No n è i nfatti un caso s e l a
Mark erl es s M otio n Capt ure ha avut o o ri gi n e d ai campi d ell a co mput er visio n e d ell ’app ren dimento autom ati co , piutt ost o ch e ess ere n ata con una p ros pet tiv a clin i ca [3].
In com put er vis io n, al go ritm i di ri con os cim ento e cattura d el movim ent o arti col at o son o in co ntin uo s vilup po, e u na gran de v ari età di sist emi vis ion -b as ed è stata p ro po sta p er la ricost ru zione d el movim ent o um ano . Per i nost ri s co pi, u na m aggio re att enzi one verrà dat a ai m eto di il cu i fine è la st ima d ell a pos a 3 D del s o ggetto e, in parti col are, ai m et odi ch e impi egan o più vist e utilizz and o p iù tel ecam ere. Di qu est i metod i è po ssibi le fo rni re u n a cl assi fi cazion e in bas e all’utilizzo o m eno di un mo d ello p er il so ggetto, disti n guen do t ra i met odi mod el -free, qu elli a uso in dirett o d el m od ello , e q uelli a us o diretto [3].
Nei m etod i mo del-free l a ricost ruzio ne d ell a p os a 3 D del co rpo avv iene senz a l’ut ilizzo del la co nos cenz a a priori d at a da un mo dell o del so ggett o. Nei m et o di a u so i ndi ret to del m od ello , qu esto vi en e utilizzato u nicam ent e com e ri feri mento per guid are l ’int erp ret azio ne dei dat i misu rati, m ent re n ei m etod i a uso di retto i l mod el lo st esso viene as sunt o com e rapp resent azion e d el so ggett o o ss erv at o, in grado di fo rni re in o gni ist ant e qu al unq ue i nformazion e d esi derat a, incl us a la pos a d el so ggetto in quell’i stant e [3].
La m aggio r p art e d egl i app ro cci è di tip o mod el -b as ed: in q uest o tip o di met odo u n mod ell o defini to a pri ori , cont en ent e le i nform azioni si a an atomi che ch e ci nem ati ch e n ecess arie, viene utilizz at o per il mat chin g co n i dati , ch e poss ono av ere o una rapp res ent az ion e bi-dimensio nale sul pi ano d ell e t el ecam ere o tri dim ensi on al e s o ttoform a, ad es emp io, di visu a l hull [25], come v errà d es crit to i n s egui to. L’u so di un mod ell o intro duce imp ort anti v an taggi, com e la po ss ibilit à di gest ire meglio ev ent uali erro ri e artefatt i sui dat i, e l a s emp licit à con cui div ersi vin coli cinem ati ci pos son o essere in co rp orati n el sist em a, limitando in qu est o modo lo sp azio di ri cerca d ell e poss i bili p os e ass unt e d al so ggetto a q uelle fisi cam ente possi bili [3].
Nel la segu ent e s ezi one, v erran no in trod otti i p rin ci pal i con cetti e l e basi d ell a t ecni ca m ark erl es s mo d el-based co n v ist e d a più tel ecamere.
1.3. 1 Descri zion e d ella tecni ca
Qu asi t utti i s ist em i mark erles s ch e co me in put pren don o dei vid eo necessit an o di uno s tadi o inizial e che id enti fi chi l’o ggett o di interes se nell a s equ enz a di immagini: q uesto p ro cesso vi ene t ecni camente chi am ato segment azi one, ed è un a fas e p art icolarm ent e criti ca in m olt e app licazio ni d i comp uter v isio n [3].
La sit uazi on e pi ù favo revol e in termi ni di s egment azio ne
dell ’imm agi n e è qu ella che p rev ed e ch e l’acquisizi on e av ven ga in un ambi ent e cont roll at o , do v e i mu ri e il pavimento costit uenti l o s fon do pres ent an o un col ore a tinta un ita ass ent e nel so gget to (s olit ament e blu o v erde) [26]: in questo caso s arà s ufficiente classi ficare com e back gro und tu tti e s olo i pix el ch e pres entano i l col ore d ello sfond o o un col ore simil e ent ro un fiss ato ran ge di vari abil ità. La m aggior p art e dell e ap pli cazi oni, tuttavi a, coi nvol ge ambi ent i rel ati vam ente meno con tro llati, com e ad es empi o un l abo rato rio di an ali si cl inica d el cammino o ppu re, n el caso d i an alis i del camm ino in acqua, un a piscin a. Un app ro cci o pi ù comp lesso e gen eral e è dun qu e sol itam ent e necess ari o.
Un ti pi co m eto do utilizzat o p er agevo lare l ’id enti fi cazione d el so ggett o è l a sott razion e del back groun d [27], ossia u n’im magi n e ch e mod ella l o s fon do d ell e acq uisizio ni vi ene s ottratt a pix el p er pix el a o gnu no d ei frame d el video. In general e, l’effett o della s ottrazion e di due imm agi ni è l ’accentu azion e d ell e differenz e t ra le du e, i l ch e si gni fi ca nel nost ro caso p orre in evi denz a il s o ggett o rispetto al back gro und , faci lit andon e l’i denti fi cazi one o tramit e un semp lice pro cess o di so gli at ura o tramit e al go ritmi di cl assi fi cazion e pi ù com plessi. Di versi mod elli per il b ack gro und so no st ati i deati per trattare di fferenti p robl emi [28], e m olti asp etti d evo no es sere p resi i n con sid erazio ne nel lo svilup po di un bu o n al gori tmo di s egm ent azion e del so ggetto (il for eg roun d) ri sp etto al b ack gro und [27].
Al cal col at ore, l e immagini v en gon o semp licem ent e t ratt at e come mat rici di el em enti , chi am ati pix el (pi ctu re el ement ). Se l ’im magi ne è in bi an co e n ero, a o gni p ix el s arà asso ci ato u n num ero ch e iden tifi ca il liv ello d i gri gio . Se l’imm agin e è a col ori , a o gni pix el verran no
ass oci ati t re v al ori , corris pon denti ai li velli d ell e tre comp onenti di col ore R GB (red, green, b lu e): sott rarre d ue imm agini a colo ri si gni fi ca dun qu e eseguire un a sott razion e tra m at ri ci t ridim ension ali , ossi a per o gni pix el sott rarre separat am ent e le t re com pon enti di col ore. La p ro fo ndit à di colo re di u n’im magi ne dip end e d al num ero di bit uti lizzati p er la codifica dei liv ell i di col ore.
In di pend ent em ent e dall’al go ritmo u tilizzato, il risult ato d ell a
segm en tazi on e è un a bi narizzazio n e d ell’imm agi ne, ass egn and o ad es empi o il v alo re 0 (n ero) a tutt i i pix el del b ack gro und e il valo re 1 (bi an co ) a tut ti i pix el d el fo regrou nd. So lo l’in fo rm azion e rel ativ a al la sagoma d el so gget t o vi en e dun qu e all a fin e m an tenut a. Spes so, al termin e dell a cl as si ficazio ne v en gon o appli cat i an ch e alt ri al gorit mi co rretti vi ch e v ad an o a m i glio rare i l ri sult ato ri empi en do ev ent ual i piccoli bu chi rim asti n ella sagom a ed elimi nando pix el sp uri erro neam ent e cl ass ificati com e fo regrou nd. Le imm agi ni s egm entat e del so ggetto co sì ott enu te v en gono chi am at e sil hou ett es (Fi gu ra 1. 6).
Fi gura 1. 6 Ese mpi o di f rame ori gi nal e del l ’ acqui si zi one (i n al t o) ed est razi one del l a si l hou et t e t rami t e segment az i one pri ma (a dest ra ) e dopo (a
Le sil hou ett es ott en ute d all a segment azione di tut te l e differenti vi ste sincro nizzat e ven go no im pi egate p er l a gen erazi on e di u n vi sual hull
[29], che rap pres ent a u n’ap prossim azion e lo cal e d el volum e
istantaneam ent e o ccupato dal so ggetto . La tecn ica di ri cost ruzion e d el visu al hul l a p artire dall e silh ou ett es fu ori gi nari am ent e int rodott a d a Lau renti ni [29]: note posizio n e e ori en tam ento d ell e telecam ere, a parti re da o gn i silh o uett e u n gen erico co no pu ò ess ere ret ro p roi ett ato nell o s pazio ; il vol ume comp reso nel l’inters ezion e di t utti i coni cost ituis ce il vis u al hull (Fi gura 1.7 ).
Fi gura 1. 7 Gen erazi on e di vi sual hul l a part i re da 4 si l houet t es
Il vis u al hul l è co stit uito d a u n ins iem e d i el em enti d is creti di volum e, chi am ati v ox els (vol umet ri c pi ctu re elem ents ), ott enut i d all a partizion e dell o sp azio calib rato in t ant i pi ccoli cub etti : sol o i v ox els le cu i proi ezio ni sui pi ani dell e t el ecam ere s iano comp resi n ell e si lhou ett es farann o p art e d el vi sual hull. La ris olu zione d el vi su al hul l dipend e nat uralm ent e dalla di mens ion e dei vox els [3].
Uno d ei p ri nci pali p robl emi l egati al l’uso dei vi su al h ull è la possi bil e inso rgenz a, in alcun i fram e, d ei cosi dd etti phan tom vol umes , volumi fant asm a. I ph anto m vol umes s ono art efatti defi niti com e si g nifi cativ e dev iazio ni lo cali ris pett o alla v era s up erfi ci e co rpo rea d el so ggett o [30], che com pai ono quan do un a p orzio ne d el vol um e di interess e è
occlus a all a v ist a d elle t el ecam ere. E’ st ato prov ato ch e u n p aram et ro cri tico nel cont ro ll o di qu es to probl ema è p rop rio il n umero di tel ecam ere im piegat e [31]. Un esem pio d i ricos truzion e di v isual hull in cui com p are un ph ant om v olum e è visi bile in Fi gu ra 1 .8.
A q uesto pu nto, si rend e n eces sari a l a d efi nizion e di un mod ello p er il so ggett o ch e guidi l’interp retazi on e d ei d ati ott enut i sp erim en talm ent e. Il mo d ello rapp res en ta i nfatti la cono scenza a p rio ri sia sul l’an atomi a ch e sul la cin em ati ca d el so ggetto e, con l ’u ni ca eccezio ne d egli app ro cci mo del -free, il mo dello è i n defini tiv a n eces sario p er l’int erp retazio ne dei dati s p erim en tal i , per p oter di scri minare e ricono scere n el vis ual hull i di versi segmenti co rp orei , ri du rre l’in flu enz a degli art efatti n ell a ri cos truzion e d el vis ual h ull e ri cavare i p aram et ri d el mov i ment o, co me gli an goli art icolari . Occo rre in fatti ricord are ch e la nuv ola d i pun ti gen erat a dall a ricost ruzio ne del v isu al hull n on con tiene di per s é alcun a in fo rmazion e ri guard o ad es empi o quali punt i ap part en gon o a u na d et erminat a region e corporea, e nemm en o cont iene d i per sé in fo rmazi on e s ull a correl azion e tra i p unti del vis ual hull gen erati in un fram e e qu elli gen erati n ei fram e preced enti o su ccessi vi [3].
Fi gura 1. 8 Vi sual Hul l af f et t o da phant o m vo l ume
Nel la realizzazion e del m od ello , l ’in fo rmazion e an ato mica può ess ere ottenut a t ramit e u n a s cansi on e d el so ggetto utilizzando un l as er scann er: il risu ltat o della scan sion e è un o ggett o tridi mens ion al e rapp resent ant e la sup erfi ci e est ern a del so gget to, d escritt a al calcolato re come m esh p oli go n ale (o m agl ia poli gon al e). In gen erale,
una m es h poli gon al e è esp ress a da u n lista o rdin at a di punti 3 D rapp resent anti i v ertici d ei p oli goni e dalla list a di poli goni che indi cano com e i v erti ci so no con nessi. Ogni verti ce è u n icament e identificato d all a s ua posizio n e n ell a lista e defi nito dal l e su e tre coo rdi n ate risp ett o al sist em a di ri feri ment o, m ent re o gni poli gono è des critto d agli id ent ifi cat ori dei s uoi v erti ci indi cati in s ens o orari o, guard an do il p oli gon o d all ’estern o [3].
Le in fo rm azioni s ull a ci nemati ca po sso n o ess ere rapp res ent ate d a un mod ello arti col ato d el co rp o u mano. Il mod ello arti col ato p er l ’anal isi del mov imento di tu tto il corpo consis te gen eralm ent e in 15 segm enti ri gi di, mo d ell anti i prin ci pal i grup pi di oss a assimil abi li a un un ico segm en to (t est a, b u sto, b acino , bracci a, avamb racci, m an i, cos ce, gam be, pi edi ), conn essi t ra lo ro co n articolazio ni a 6 gradi d i libert à (3 trasl azioni e 3 rotazioni). Ol tre a q uel lo app en a d es critto poss ono ess ere u tilizzati an ch e mod elli d iv ers i, pi ù o men o arti col ati , a seco nd a dell e n eces sit à e d egli obiet tivi d el cas o. Ogn uno d ei s egm enti corpo rei del mo del lo h a un s egm ento p ad re (con l ’uni ca eccezion e d ell a tes ta) e può avere più s egm enti fi gl i. Un si stema di riferim ent o tecni co vien e a questo pu nto d efi nit o per o gnu no d ei segm enti, s egu en do u n crit erio com un e p er cui il si s tem a di riferim ento l ocal e di o gni part e s i trovi i n una relazi on e not a con i sist emi di riferiment o d el segm ento pad re e dei s egm enti fi gli. L’uni ca eccezio ne è costitui ta d al s egment o t est a, il cui sist em a di riferi ment o è o ri ent ato co me qu ello glo bal e [3].
Così d efi nito il sis t em a arti col ato fo rm a un a cat en a ci nematica, e l a pos a d ell ’int ero mo d ello è univ ocam ent e identificabi le noti po sizion e e ori ent am ent o di o gni segmento ri sp etto al segmento p ad re.
I vi ncoli im posti al l e arti colazi oni s ono inolt re p arte del b agaglio d i con os cenza a p rio ri ch e pu ò ess ere sfruttat o e i ncorpo rato in qu est a fase d ell a mo dellaz ion e. Qu esto tip o di in fo rm azion e permette di amm ett ere t ra tutt e l e p ossi bili con fi gurazioni ch e and ranno a fitt are i dati sp erim ent ali sol o qu ell e an at omi cam ent e s ens ate [3].
A qu esto p unt o del lav oro occo rre gen erare il mod ello com ples sivo , speci fi co p er il s o ggetto , che in clud a s ia le in fo rm azioni an atomiche,
preced entemente ott enu te co n il l as er scann er, ch e l e in form azioni cin em ati ch e. In sos t anz a, ciò che o ccorre fare è ad att are i l mod ello a 15 segmenti ri gidi all a mes h poli gon al e sp eci fi cament e creata sul so ggett o, id enti fi can do sull a mesh i 15 segm enti co rp orei e le posizio ni dei cent ri arti col ari. Si rius ci rà in qu est o mo do nel l’i nt ento di creare un m od ello sp ecifico p er il so gget to e uti lizzabil e p er l ’i nterp ret azio ne dei d ati, ch e cont en ga al s uo int erno le in fo rm azioni di tipo si a morfol o gi co ch e ci nemati co [3].
Recentemente, è st ato svil upp ato un al gorit mo p er l a gen erazio ne aut omat ica di u n mo dell o sp eci fico p er i l so gget to a p arti re dall a s u a rapp resent azion e sup erfi ci al e com e m esh poli gon ale [32], ch e perm ett a di in clu dere di rett ament e l e i nform azi oni cin em ati ch e n ella m es h speci fi ca d el s o ggett o, ott enendo le po si zioni d ei cent ri arti colari e l a segm en tazi on e d ell a mes h n ell e div ers e parti d el co rp o. Il sud det to al gorit mo può essere utilizzat o co n u na q uals iasi fo rma um an a, ess end o stat o svil upp at o su u n database di l as er s can di pers on e, acqu isite nella stes sa po sizion e di ri ferim ent o [3].
Si most ra in Fi gu ra 1.9 un es empi o di m esh tri an gol are di un so ggett o acquis ita co n un las er s can ner e il modello com plet o d ell a segm en tazi on e in 15 segm enti co rpo rei, speci fi co p er il so gg etto d opo l’appli cazion e d ell ’algoritmo si gen erazi one aut omatica d el mod ello [32].
Fi gura 1. 9 Rap present azi one del l a superf i ci e est erna del sogg et t o c on mesh t ri angol are acqui si t a con l aser scanner (a s i ni st ra) e model l o co m pl et o del
sogget t o dopo l ’ appl i cazi one del l ’ al gori t mo di generazi one a ut oma t i ca del model l o (a dest ra )
E’ s tat o p rov at o ch e l a p ro cedu ra auto mati ca [32] lavo ra b en e an ch e quando si us a il visu al h ull com e i npu t i nvece ch e l a m es h forni ta d al las er scan ner, ch e richi ed erebb e un co s toso h ard ware d edi cato allo sco po e no n s em pre dispo nibil e. Nel cas o in cui si vo gl ia im piegare il visu al hull com e in put, si ri ch iede al s o ggetto di riman ere in piedi all ’int erno del vol ume di mis ura nel la p osizio ne di riferi ment o effettu an do l ’acquisi zione per al cuni ist anti. Il vis u al hul l d el so ggett o in qu est a con fi gu razion e vien e co sì utili zzato per gen erare il model lo an atomi co, ch e in qu esto cas o risult a un po’ più “ab bon dante” risp ett o al so ggetto v ero, d ato ch e il visu al h ull è un ’app ros sim azione per eccess o d el vol um e occu p ato dal l’o ggetto. An ch e s e il m o dell o così creato è generalm ente m eno accurato risp ett o all ’ut ilizzo del laser scann er, può com un que rap pres ent are u n inp ut v alid o s e il num ero di tel ecam ere utilizz at e è s uffi ci ent em ent e el ev ato (in p arti col are in num ero m aggi ore a 8 tel ecamere, pos sibil ment e alm en o 1 6) [3].
Un a v olt a o ttenut o i l mod ell o com pleto speci fi co per il s o ggetto , si è pro nti per il s uo util izzo nel l’i nt erpret azi one d ei dati. Qu est o obi ettiv o viene raggiu nto trovando , i stant e p er is tant e, l a con fi gurazio ne spazi al e (o ssi a la p o sa d el mod ell o) ch e megli o rapp res ent a i dati, t ra tutte qu ell e p erm es s e o ss ervando i vin coli im posti . Ri co rdi amo che i dati sp eriment ali s o no rapp resentati in 3D d al vis ual hull . La gius ta con fi gurazio ne d el mod ello pu ò es sere trov at a facendo co rrispon dere ad o gnun o dei p unti del vis ual hull un pu nto del mod ello m es h, us and o ad es emp io l ’al go rit mo A ICP [33] (Arti culat ed It erat iv e Clo s est P oint ). An ch e il mat chi n g nel s ens o opp osto (mod ello sui d ati ) è tuttavi a possi bil e: i due ti pi di app ro ccio d ifferis co no solo n ella lo ro rob ust ezza ri sp etto ai d ati co rrotti [3]. Se nel p rimo caso (dat i sul mod ello ) l ’al go ritm o è m eno rob usto risp ett o ai pha nto m volu mes ev ent ual mente p resenti n el v isu al h ull, n el s econ do ti po di ap pro ccio le parti m an canti del vi sual hull (s peci alm ente arti m an canti ), d ovuti per es empi o a erro ri n el la s ott razi on e d el b ack gro und , p ortano i l mod ello ad as sum ere con fi gu razioni compl et am ent e s bagli at e [3].
L’app ro ccio A ICP [33] si bas a sul la co rri spon denza t ra coppi e di punti vici ni su du e m es h div ers e: l ’al go rit mo agis ce lo calmente, no n con sid erando t utt e l e po ssib ili comb in azioni di punt i corri spon denti sull e due m esh . Qu esto rid uce s ensi bilm ent e il cos to comput azion al e, al prezzo di un au ment o del la s ens ibil ità ri sp etto al posiz ion amento inizial e del mo del lo [3].
Fo nd am ent alm ent e, all a fin e il sist em a si ridu ce ad ess ere un tipi co pro blema ai min imi quadrati no n li neare [3].
1.3. 2 Van tag gi e p roblemi
La m arkerl ess mo tion capt ure rap p resent ereb be u n’i nt eres sante
pot enziale via ris olu tiva nei co nfro nti di molti di q uei p robl emi ch e caratt erizzav ano i si stemi otti ci m ark er-bas ed . In primo luo go, co n l a rimozio ne di q u alsi asi struttu ra appli cat a al corpo per l ’acq uisizion e del mo vimento si elimin a tot alm ent e l’in gom bro sul soggetto, perm ett end o l’acqui s izione di movi menti nat urali, l ib eri da co strizio ni e ev ent ual mente an ch e ampi , con l’uti lizzo di o ppo rt uni setu p. In secon do lu o go , el i minando il biso gno di posizio nare i mark er, si ridu co no di mol to an ch e i t emp i di prep arazion e d el pazi ent e. In fin e, l a tecni ca m arkerl ess pres ent a un a p ot en ziale appli cabil ità an ch e i n con tes ti in cui l’ap plicazio ne di u n a tecni ca m ark er-b as ed sareb be risul tat a più di ffi cil e: è po ssibil e ad esemp io impi egare l a tecni ca mark erl es s p er l ’acq uisizion e del cam min o in acq ua.
Il p rin cip al e limit e pres ent ato, ad o ggi , ri sp etto all ’impi ego del la tecni ca mark erl ess p er appli cazioni cli ni ch e e bi omeccani ch e è an co ra purt ro ppo l a s carsa accurat ezza d ei m et odi correnti [3]. L’accurat ezza dell a m arkerl ess m o tion cap tu re d ip end e tuttavia d a mo lti fattori , tra cui la qu alit à d ell a s egm ent azio ne inizi al e, l a ris oluzio ne e s opratt utto il num ero di t el ecam ere im pi egate (p aram etro ch e in flu enz a di molto l a qualità dell a ricost ruzion e del v isu al hu ll) [34]: a seco nd a d el d ataset impiegato, i nfatti , l a differenz a tra l a ricostruzion e d ell a p osi zione dei cent ri articol ari con tecni ca m ark erl ess e mark er-based può p ass are d a 7-8 cm a 1 -2 cm , con l’al gorit mo propo st o d a Co razza et al [35].
1.4 L’analisi del cammino in acqua con tecnica markerless
Nel p res ent e l avo ro di tesi s i fa ri ferim ento a u no sp eci fico uso d ell a tecni ca m ark erless: si impi ega in p arti colare la t ecni ca nel l’ambit o dell ’acquis izion e d el cammin o in acqu a. Nel la segu ent e s ezion e si tent erà du nqu e di sottoli neare l ’impo rtanz a d ell o svi lup p o di un a tecni ca ch e p ermet ta di acquis ire in mo d o accurato il m ovim ent o nel la con dizion e su bacq uea, d ati i num erosi ben efi ci offert i dall ’am bi ent e acqu ati co n ell’am bit o di un p erco rso riab ilitati vo.1.4. 1 Van tag gi offerti dall ’a mb ien te acqu ati co sul pro cesso riabili ta ti vo
In q uesta sezi on e s i an dran no a ri co rd are al cun e p ro pri et à fi si ch e dell ’acqu a (spin ta idro st atica, vis co sit à e pres sion e i drostatica), evi denzian don e gli effetti b en efi ci nell ’ambit o di un ev en tu ale percorso riabilit ati v o in s egu ito, ad es empio, a u n in fo rtu ni o o a un interv ent o chi ru rgi co .
Dal p rin cip io di Archim ed e, o gni co rp o immers o i n u n flui do ri ceve una spi nta v erti cal e dal basso vers o l 'alt o u gu al e, in mo dul o , al peso dell a m ass a di fl uid o spost at o. Ciò si gn ifi ca, nel caso di u n a pers on a immers a, ri us ci re a ridurre l’effett o del la gravit à sul co rpo , scari cand o pro gres siv am ent e il pes o d all e arti col azi oni imm ers e. La po s sibilit à di decrem ent are il pes o effettivo d ell ’in divi duo in p rop orzi on e al grado di immersio ne h a un ’i mportante pot enzi ali tà t erap eutica: dato infatti ch e il cari co assi al e sul la colon na v ert eb ral e e il p eso su ppo rt ato d all e gi unt ure, sp eci alm en te an ca, gin occhio e cavi gli a si ri du ce au ment an do il grado di imm ersio ne, m onito rand o le pro fo ndit à al le q ual i ven gono effettu ati mov imenti fu nzion ali ed es erci zi, l’effett o d ell a gravit à può ess ere p ro gressi vam ent e reint ro dott o, promuov endo un raffo rzam ent o gradu al e e cont ro llat o [36]. Grazie a q ues ta prop ri età, l’acqu a perm ett e di ri tro v are u n amb ient e fisi co a b asso stress p er le arti colazio ni, ideal e q uando le att i vità a pieno carico s ono an co ra p remat ure, m a allo stes so t empo è aus pi cabil e che i l so gget t o ri acquis ti mobi lit à. L’effetto dell a spi nt a idrost atica può ess ere i no ltre sfrutt at o per p ort are l e
art icolazi oni a l avo rare con es cu rsi oni an gol ari più ampi e ch e fuo ri dall ’acqu a. I v ant aggi ri gu ardanti l a rap i da rip resa d ell a mob ilità del le art icolazi oni son o b en do cu mentati [37].
La vis cos ità è un a grand ezza fi sica ch e q uanti fica la resi s tenz a d ei flui di al lo s co rrimento, o ssi a l a lo ro co esio n e int ern a. Quan do u n co rpo si muo v e all ’i nterno di u n fl uido , il co rp o st esso è s o ggetto a
una res ist enza all ’avanzam ent o (resist enz a flui dod inami ca)
pro po rzion al e al la d imen sion e e geom et ria d el corpo, all a v elocit à di av anz amento e all a viscosit à d el fl uido . Essendo l ’acq u a pi ù viscos a dell ’ari a, l a res ist en za all ’av anzamento o fferta dal l’ambi ente acqu ati co è sup erio re risp etto all a’av anz am ent o su lla terraferm a, e l’effet to può risul tare parti col arm ent e util e a s cop o ri abili tati vo p er p rom uov ere il
raffo rzam ent o d ei mus coli . In olt re, d ato ch e l a resist enz a
all ’avanzam ent o n el l’acqu a aument a all ’aum ent are d ell a v elocit à di av anz amento e, q uin di, all o s fo rzo es erci tato d al so gget to, si ridu co no le possi bilit à di u n re i nfo rt unio du rant e il p ro cesso ri abi lit ati vo [3]. Un 'alt ra imp ort an te pro priet à dell ’acqu a è la p ressio ne id rost ati ca. Dat a in fatti l a legge di Stev ino ch e afferma che i n un flui do di densit à cost an te ρ, l a p ressi o ne es ercit at a da un a col onn a d i fl uid o in un su o punto di p ro fo ndit à h (dis tanza d al p elo lib ero del flui do ) è dirett am ent e propo rz ion ale a h , allo ra m uov end osi d al p el o dell ’acqu a verso il fond o della pis cin a l a pression e id rost ati ca aum ent erà gradu alm en te. L’effetto di qu est o gradi ent e pres so rio in un proces so riabilit ati vo è l a su a cap acità di in du rre la ri duzio ne d ei ristagni di liquid o e l a ri soluzi one d egli ed emi ch e no rm alm ent e s i fo rman o, ad es empi o, dop o u n int ervento su un ’arti col azio ne. La pressi on e idro st atica è in fin e anche respo ns abile d ell e v ariazi oni n ell a circolazi on e s an gui gna oss erv at e q uando il corpo è i mmers o [3].
Cammin are n ell ’acq ua è co nsid erata la prin ci pal e terapi a p er p azi enti con dis tu rbi nella d eambul azio ne, an ch e perch é non ri chi ed e n es sun a abili tà p art icol are, come ad es empi o n uot are. Com e gi à s piega to, da un punto di vist a m eccanico i d ue pri n cip ali van taggi d i un a ri abi litazio ne acqu ati ca p osso no es sere in divid u ati n ell a rid uzion e del p eso app arent e sull e arti colazi oni, ment re allo st esso temp o aum ent a l a resist enza
all ’avanzam ent o, ch e p rom uo ve un raffo rzam ent o m uscol are. In olt re, i
movim enti s ono t ipicam ent e eseguiti più lent am ent e risp etto
all ’am bi ent e est erno av en do dun qu e an che più t em po p er co ntro llarli . An ch e se il cammin o in acqu a è st at o ri conos ciu to di grand e utilit à sia in fas e d i allenamen to che di ri abilit azi one, e no nost ante il cres cent e interess e p er l’anali si del cammi no in acqu a, an co ra p ochi s tudi son o stati cond otti in qu esto s ens o. Comp rendere i nv ece come vari ano i paramet ri del la lo co mozion e a s econd a del t ipo di so ggetto (s ano o mal ato, età, grado d i all en am en to et c. ), e q uali si ano es att ament e gli effetti d ell ’ambi ent e acqu ati co sul la d eambul azion e, p erm ett ereb be un a pres crizi on e più ad egu at a d el cammi n o in acqu a com e part e di pro grammi si a d i all en am ento ch e riabilit ativi [3].
In qu est o s enso , è d unqu e di grand e imp ort anz a an ch e lo s vil uppo e il perfezio nam en to d elle tecn iche ch e p erm ett ono l ’acquisi zione d el movim ent o an ch e i n un am bient e com e quello acqu ati co . Tra q uest e tecni ch e, ci si o ccup erà in qu esto l av oro di tesi di un a sp eci fica fase dell ’acquis izion e d el la t ecni ca m ark erl es s .
1.5 Obiettivo della tesi
Come gi à accenn ato n ell a s ezion e 1.3. 1, l a p rim a fas e d ell e el abo razioni p er l’acquisizio ne d el mo vi ment o co n tecni ca mark erl es s con sist e soli tam ente nell a s egm ent azio ne d ell ’o ggetto di interess e risp ett o al b ack groun d, n ell a vist a di ci as cun a d elle t elecam ere.
Nel pres ent e l avo ro di tesi , l’o bi ettiv o sarà d unq u e lo svil uppo e la caratt erizzazion e di div ersi al go ritmi d i s egm ent azion e, n ell’ambit o dell a p arti col are ap plicazio ne del cam mino in acq ua. I prin ci pal i parti col ari p ro blemi pres ent ati in qu est o tip o di appli cazi one so no inn anzitutt o, per qu ant o ri gu ard a l a s egment azio ne, l a n on com plet a stati cit à d el b ack gro und, a cau sa di ri flessi e om bre a p el o d ell ’acq ua ch e v ariano n el t em po, e l a p resenza d el rifl es so d el so gg etto sull a sup erfi ci e inferio re del p elo d ell ’acq ua ch e, avendo u n col o re mol to simile al so ggetto v ero, vi en e facilm en te erro neam ent e classi ficato. In questo l av oro di tesi si d es cri verà an ch e u n al go ritmo di mi gli oram ento