Cap.1 Materiali polimerici
1.1 Descrizione dei materiali polimerici
I polimeri possono essere descritti come lunghe macro-molecole cateniformi, diversamente disposte nello spazio e costituite dalla ripetizione dell’unità costituente elementare: il monomero. Spesso una sola macromolecola di polimero può contare da diecimila ad alcuni milioni di atomi.
Tutta la classe di questi materiali presenta proprietà comuni quali la flessibilità, l’elasticità, la leggerezza, la possibilità di esser lavorati per ottenere fibre o film sottili. Ovviamente tali proprietà dipendono fortemente della struttura interna di ogni polimero quindi saranno presenti in proporzioni diverse in polimeri diversi.
Una prima classificazione dei polimeri può essere fatta delineandone due grandi classi:
• Polimeri organici (il Carbonio è l’atomo principale della catena); • Polimeri inorganici (l’atomo principale della catena non è il Carbonio);
Le principali differenze tra le due classi sono costituite dalle limitazioni dei polimeri organici rispetto a quelli inorganici. Essi tendono infatti a decomporsi o a fondere a temperature relativamente basse, soprattutto a causa della reazione degli atomi di carbonio con l’ossigeno; essi inoltre si gonfiano o si sciolgono a contatto con solventi a caldo o oli minerali, scoraggiando così il loro impiego ad esempio in motoristica; in più, spesso non mantengono elasticità o gommosità per range di temperatura sufficientemente ampi ed oppongono scarsa resistenza alle radiazioni ultraviolette.
In base alla struttura che assume la catena si possono ancora distinguere:
• Copolimeri (catena principale formata da due o più tipi di monomero) • Polimeri lineari: presentano una struttura di base del tipo
detta catena principale, alla quale possono essere connesse altre catene secondarie costituite da un numero minore di atomi o persino da un atomo solo.
• Polimeri non lineari, a loro volta divisi in: o Polimeri ramificati: (Fig. 1.1) alla catena
principale sono legate catene secondarie di lunghezza paragonabile a quella della catena principale. Il polietilene, ad esempio, è un polimero che può essere ottenuto sia in forma lineare che ramificata.
o Polimeri reticolati: possiedono una struttura nella quale più catene principali sono tenute assieme da rami che agiscono da cross-link (Fig. 1.2). In alcuni casi la reticolazione si spinge a livelli tali che la molecola polimerica si presenta come una maglia tridimensionale di dimensioni macroscopiche; ne sono esempio le gomme vulcanizzate dei pneumatici, che sono vere e proprie molecole reticolate di dimensioni enormi.
o Dendrimeri: hanno una forma arborescente nella quale non esistono catene principali ma soltanto un insieme di ramificazioni (Fig. 1.3).
• Polimeri amorfi: non presentano strutture cristalline, le catene sono orientate
in modo casuale e formano una struttura “a gomitolo”;
• Polimeri cristallini: sono formati da insiemi di catene fortemente connesse
fra di loro a formare sottostrutture cristalline; essi presentano tuttavia qualche Fig.4.1 Struttura dei polimeri ramificati
Fig. 1.2 Struttura dei polimeri reticolati
Fig.4.3 Struttura dei dendrimeri
Fig. 1.3 Struttura dei dendrimeri
Fig. 1.1 Struttura dei polimeri ramificati
regione amorfa (e per questo sarebbe più corretto definirli come semi-cristallini): le sottostrutture cristalline si trovano immerse in una matrice amorfa;
• Polimeri termoplastici: sono privi di cross-link, conservano la propria
plasticità a caldo, induriscono per raffreddamento e, in genere, possono riprendere la plasticità iniziale per riscaldamento;
• Polimeri termoindurenti: assumono una consistenza rigida permanente sotto
l’azione di calore o di catalizzatori e, una volta formati, non riprendono più la plasticità iniziale;
• Elastomeri: sono in grado di subire enormi deformazioni se sottoposti ad uno
sforzo e di recuperare completamente (o quasi) la forma originale non appena viene rimosso lo sforzo che ha provocato la deformazione. I polimeri più efficaci come elastomeri sono i polimeri cross-linked, con proprietà gommose. Fra gli elastomeri non si può fare a meno di citare il silicone che, oltre ad avere larghissimo utilizzo, industriale e non, è stato adoperato in questo lavoro di tesi.
1.2 I polimeri elettroattivi
Vengono classificati come polimeri elettroattivi (e indicati con l’acronimo EAP, ElectroActive Polymers) quei polimeri che rispondono a stimolazioni elettriche con un significativo cambiamento di forma o di dimensioni.
Un voltaggio applicato modifica la composizione o la struttura molecolare del polimero che si espande, si contrae o si piega.
Il movimento risulta più regolare e più realistico di quello generato dai congegni meccanici: come i muscoli infatti, i polimeri sono flessibili, non limitati dalla rigidità degli ingranaggi e dei cuscinetti.
Per tali motivi gli EAP hanno acquisito l’appellativo di “muscoli artificiali” e gli attuatori con essi realizzati quello di “muscoli artificiali a polimeri elettroattivi”, indicato dall’acronimo EPAM (Electroactive Polymer Artificial Muscles).
1.3 Classificazione dei polimeri elettroattivi
Gli EAP possono essere suddivisi in due grandi categorie: ionici (attivati da trasporto di ioni o molecole in risposta ad un campo elettrico esterno) ed elettronici (attivati da un campo elettrico esterno o da forze coulombiane).
EAP ionici
I polimeri di questa categoria si suddividono nelle seguenti quattro classi: 1. gel,
2. compositi polimero-metallo, 3. polimeri conduttori,
4. nanotubi di carbonio.
Tutti questi materiali richiedono bassi voltaggi di attivazione (1÷5V), tuttavia
necessitano in genere di operare in ambiente liquido e, in alcuni casi, mantengono con difficoltà la deformazione indotta dalla tensione continua di attivazione.
Inoltre non presentano da un punto di vita meccanico buone prestazioni, mostrando bassi valori di strain (ordine dell’ 1%), basse velocità di risposta e breve durata. Pertanto questa particolare categoria di polimeri non viene utilizzata per la realizzazione dei dispositivi di attuazione elettromeccanica che sono oggetto della presente tesi.
EAP elettronici
I polimeri di questa categoria si suddividono nelle seguenti quattro classi: 1. elettrostrittivi,
2. piezoelettrici,
3. ferroelettrici elettrostrittivi, 4. elastomerici dielettrici.
Tutti questi materiali richiedono alti campi elettrici di attivazione (tipicamente>150V/µm). Possono mantenere la deformazione sotto attivazione,
indotta da una tensione continua, permettendo in tal modo di essere presi in considerazioni per applicazioni robotiche.
A differenza dei polimeri elettroattivi ionici, quelli elettronici garantiscono massimi valori di strain (ordine 10 % ÷ 100 %) insieme a buoni valori di stress (fino ad 1 MPa), nonché alte velocità di risposta ed elevata durata. Ciò permette di utilizzare
questa categoria di materiali per la realizzazione di attuatori elettromeccanici con buone prestazioni.
I polimeri elettronici inoltre hanno grandi prestazioni in termini di conversione dell’energia elettrica di attivazione in energia meccanica e pertanto possono essere utilizzati anche per la realizzazione di sensori di deformazione.
1.4 Polimeri elettroattivi elettronici
Si esamineranno di seguito le quattro classi di polimeri che appartengono alla suddetta categoria.
EAP elettrostrittivi
L’elettrostrizione è il più importante fenomeno di accoppiamento elettromeccanico presente in tutti i materiali isolanti, e consiste nella dipendenza quadratica della deformazione percentuale (o dello sforzo) dalla polarizzazione ottenuta applicando un campo elettrico al materiale. Tutti i polimeri isolanti sono pertanto elettrostrittivi. L’aggettivo “elettrostrittivi” è spesso però riservato solo a quei polimeri che manifestano spiccatamente tale effetto. Nella maggior parte dei polimeri isolanti, infatti, l’elettrostrizione è relativamente debole; una delle possibili ragioni di tale evidenza risiede nel basso valore della loro costante dielettrica ε, come suggerito
dalla dipendenza da ε del coefficiente di elettrostrizione.
E’ noto inoltre che la maggior parte dei polimeri con modulo elastico di 1GPa hanno un coefficiente di elettrostrizione M (Strain=ME2, dove E è il campo elettrico applicato) inferiore a 2×10-4 m2/V2: pertanto anche con un alto valore del campo
elettrico come 100V/µm si ottiene una deformazione percentuale inferiore a
2×10-4=0.02%. Per polimeri con basso modulo elastico, invece, il coefficiente
elettrostrittivo diviene piuttosto ampio: ciò si manifesta con una grande deformazione percentuale elettrostrittiva, anche se la forza esercitata dal polimero è relativamente bassa se comparata con quella tipicamente esercitata dai polimeri piezoelettrici. EAP piezoelettrici
Si dicono piezoelettrici quei polimeri che presentano l’effetto piezoelettrico, che, da un punto di vista generale, esiste solo in materiali che possiedono simmetria non
centrale. L’effetto piezoelettrico è un effetto elettromeccanico secondo il quale la deformazione percentuale e lo sforzo sono accoppiati linearmente al campo elettrico e all’induzione elettrica ( o spostamento dielettrico) D :
D = d T (effetto piezoelettrico diretto) S = d E (effetto piezoelettrico inverso) Il fattore moltiplicativo d è il coefficiente piezoelettrico:
EAP ferroelettrici elettrostrittivi
Un polimero si dice ferroelettrico se possiede una polarizzazione spontanea che può essere riorientata in possibili direzioni di equilibrio per mezzo di un campo elettrico, determinando conseguentemente un comportamento elettrostrittivo nel materiale. Il processo di riorientamento dei dipoli è denominato “transizione in fase ferroelettrica”. I polimeri ferroelettrici presentano anche proprietà piezoelettriche (oltre che elettrostrittive) ma, come detto, a differenza dei polimeri puramente piezoelettrici, possiedono una polarizzazione spontanea.
Un polimero ferroelettrico può presentarsi in due forme:
• forma di un singolo cristallo;
• forma semicristallina, nella quale i cristalli ferroelettrici sono inglobati in una
matrice amorfa inattiva.
I polimeri ferroelettrici più comuni hanno il secondo tipo di forma. Ne sono esempio il polivinil fluoruro (PVF), il poliviniliden fluoruro (PVDF o PVF2), i copolimeri del PVDF con il trifluoroetilene (P(VDF-TrFE)), con il tetrafluoroetilene (P(VDF-TFE)) o con l’esafluoropropilene (P(VDF-HFP)).
I polimeri ferroelettrici hanno un modulo di Young dell’ordine di 1÷10GPa.
Applicando un campo elettrico in AC di grande intensità (≅200V/µm) si possono
ottenere deformazioni percentuali elettrostrittive dell’ordine del 2%.
Sfortunatamente questo livello di campo è pericolosamente vicino alla rottura dielettrica e a tali valori si manifesta un alto grado di isteresi dielettrica (perdite dielettriche, riscaldamento). T E E S T D d ∂ ∂ = ∂ ∂ =
EAP elastomerici dielettrici
Polimeri con un basso valore della rigidezza elastica e un alto valore della costante dielettrica subiscono, quando sottoposti ad un campo elettrico, grandi deformazioni semplicemente per effetto coulombiano, ossia per effetto delle interazioni elettrostatiche tra le cariche presenti sugli elettrodi posti sul polimero.
Appartengono a tale classe di EAP gli elastomeri acrilici, gli elastomeri siliconici e alcuni elastomeri poliuretanici.
Tali polimeri sono i più deformabili fra tutti quelli appartenenti alla categoria degli EAP elettronici.
Gli attuatori realizzati con tali polimeri possono essere costituiti da un sottile film di elastomero avente elettrodi deformabili applicati alle sue due facce principali; sotto l’azione di un campo elettrico esso subisce uno schiacciamento nella direzione dello spessore, ad opera della pressione elettrostatica (descritta dallo stress di Maxwell) e di una espansione nelle due direzioni trasversali.
La deformazione percentuale indotta è proporzionale al quadrato del campo elettrico moltiplicato per la costante dielettrica ed è inversamente proporzionale al modulo elastico. Per raggiungere il livello di campo elettrico richiesto per l’attuazione è necessario utilizzare alti voltaggi e/o film con piccoli spessori.
Poiché la maggior parte dei polimeri elastomerici gode della proprietà di isovolumicità, si può sfruttare la condizione di conservazione del volume per determinare il legame tra i cambiamenti di dimensioni del polimero a seguito dell’attuazione. Gli attuatori ad EAP dielettrici richiedono grandi campi elettrici (≅100V/µm) e possono indurre deformazioni percentuali significative (10÷200%).
Per quanto riguarda il comportamento del materiale al variare della temperatura, è da ricordare che il modulo di Young aumenta al decrescere della temperatura, sino a valori tali da rendere il polimero troppo rigido per essere usato come attuatore. Si riporta di seguito una breve sintesi delle caratteristiche peculiari dei più comuni elastomeri dielettrici.
Elastomeri poliuretanici:
I poliuretani possono trovarsi in diverse forme. Esistono infatti sia poliuretani elastomerici sia poliuretani più rigidi. Per ovvie ragioni gli elastomeri poliuretanici sono particolarmente adatti all’impiego nel campo dell’attuazione.
Essendo elastomeri, nella presente trattazione sono stati inclusi nella classe degli elastomeri dielettrici; in realtà però essi presentano una certa orientabilità dei dipoli delle loro catene polimeriche a seguito del campo elettrico applicato: possono pertanto essere considerati dei “materiali di transizione” fra la classe delle gomme pure (elastomeri dielettrici puri, essenzialmente di natura amorfa) e quella dei
semicristallini (polimeri ferroelettrici
elettrostrittivi).
Gli elastomeri poliuretanici, la cui struttura generica è mostrata in Fig. 1.4, devono essere considerati copolimeri a blocchi costituiti da cristalli che agiscono come cross-link che tengono insieme una matrice amorfa. Il loro modulo elastico è determinato dal grado di separazione delle fasi cristallina e amorfa. Da essi si ottengono deformazioni dell’11% in spessore e del 12% in area con un campo elettrico applicato dell’ordine 100÷160V/µm.
Elastomeri siliconici:
I siliconi sono polimeri amorfi caratterizzati da una disposizione molecolare molto disordinata. La tipica struttura di un polimero siliconico è quella riportata nella Fig. 1.5.
Fig. 1.4 Struttura interna del poliuretano
Fig. 1.5 Struttura del silicone
Questi materiali permettono la realizzazione di ottimi elastomeri in virtù dell’estrema mobilità dei due legami presenti fra ossigeno e silicio, che conferiscono una notevole flessibilità alla catena principale (Fig. 1.6).
Gli elastomeri siliconici sono essenzialmente delle gomme, alcune trasparenti altre opache, facilmente lavorabili.
I loro campi elettrici di rottura dielettrica raggiungono i valori di 350÷400V/µm.
Sono i materiali che, assieme agli acrilici, sono in grado di subire in attuazione le più alte deformazioni: se sottoposti ad alti campi elettrici si comprimono fino al 40% in spessore, e si espandono di circa il 60÷90% in superficie.
Necessitano di campi elettrici di pilotaggio tipicamente dell’ordine di 60÷100V/µm.
Hanno solitamente alte velocità di risposta all’applicazione di un voltaggio. Pur essendo materiali dalla scarsa rigidezza essi possono sviluppare pressioni di attuazione dell’ordine di 0.4÷3MPa.
Elastomeri acrilici:
I polimeri acrilici, o acrilati, sono una famiglia di polimeri appartenenti alla categoria dei vinilici, aventi la struttura presentata in Fig. 1.7.
Un esempio di polimero acrilico è il polimetilacrilato: è un particolare polimero acrilico il cui gruppo –R è costituito da un gruppo metilico (-CH3).
Fig. 1.6 Natura molecolare dell’elasticità delsilicone
Fig. 1.7 Struttura dei polimeri acrilici
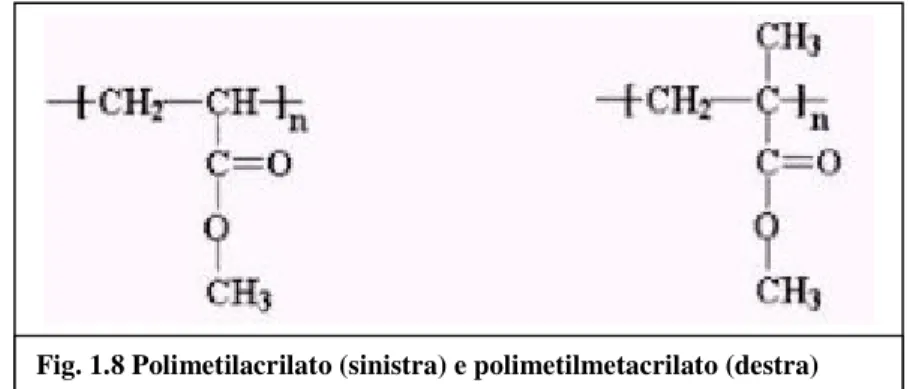
E’ interessante notare come il polimetilacrilato sia fisicamente una gomma molto morbida, mentre un polimero dalla struttura molto simile (si veda la Fig. 1.8), il polimetilmetacrilato (derivante da monomeri di metacrilato) meglio conosciuto come “plexiglas”, sia invece una plastica molto rigida.
Dal punto di vista elettroattivo i polimeri acrilici mostrano notevoli potenzialità: i campi elettrici di rottura dielettrica superano i 400÷500V/µm, le deformazioni
possono superare il 100% in superficie e il 30% in spessore.
Dal un punto di vista meccanico si presentano come materiali molto morbidi e fortemente viscoelastici.
1.5 Nota sul termine “elettrostrizione”
A causa della disparità di terminologia riscontrata in letteratura, per maggior chiarezza si effettua la seguente precisazione:
• Il termine elettrostrizione indica un preciso fenomeno fisico consistente nella
dipendenza quadratica della deformazione percentuale (o dello sforzo) dalla polarizzazione :
dove βijkl è il tensore dei “coefficienti elettrostrittivi correlati alla carica”.
• L’elettrostrizione è in linea di principio un fenomeno presente in tutti i materiali
isolanti.
Fig. 1.8 Polimetilacrilato (sinistra) e polimetilmetacrilato (destra)
l k ijkl
ij P P
• Alcuni autori riservano però l’aggettivo “elettrostrittivi” soltanto per quei
polimeri che presentano spiccatamente tale effetto: essi sono i polimeri ferroelettrici elettrostrittivi; in tali polimeri, infatti, l’effetto elettrostrittivo è quello a cui devono essere maggiormente attribuite le cause delle deformazioni che si ottengono a seguito dell’applicazione di un campo elettrico.
Altri autori estendono la qualifica di “elettrostrittivi” a tutti i polimeri appartenenti alle seguenti due classi di polimeri elettroattivi elettrici: polimeri ferroelettrici elettrostrittivi e polimeri elastomerici dielettrici. In tal senso il termine “elettrostrittivi” è utilizzato, come dichiarato dagli stessi autori, semplicemente per indicare l’esistenza nel materiale di una risposta, in termini di sforzo e di deformazione percentuale, al campo elettrico applicato. Si deduce pertanto che in tale generica accezione il termine è usato semplicemente come sinonimo dell’altrettanto generico “elettroattivi”.
Elettrostrizione di un polimero isotropo
Per un polimero isotropo polarizzato lungo la direzione z valgono le seguenti equazioni con notazione matriciale in forma ridotta:
dove S3 è la deformazione percentuale lungo la direzione di polarizzazione
(deformazione percentuale longitudinale) e S1 e S2 sono le deformazioni percentuali
lungo le due direzioni perpendicolari a quella di polarizzazione (deformazioni percentuali trasversali). Evidenze sperimentali e considerazioni teoriche indicano inoltre che β13>0, β23>0 e β33<0: ciò equivale a dire che per un polimero isotropo un incremento
della polarizzazione determina una contrazione lungo la direzione z della polarizzazione stessa e una espansione lungo le due direzioni x e y ortogonali a z.
Elettrostrizione di un polimero isotropo che presenti un comportamento dielettrico lineare
Per un polimero che presenti comportamento dielettrico lineare la polarizzazione P è legata al campo elettrico E e alla permittività dielettrica ε = ε0 εr nel seguente modo:
2 33 3 2 23 2 2 13 1 P S P S P S β β β = = =
dove ε0 è la permittività dielettrica del vuoto (ε0=8.85 x 10-12 F/m).
Se il polimero è anche isotropo valgono quindi, per quanto osservato precedentemente, le seguenti equazioni con notazione matriciale in forma ridotta:
dove M13 , M23, M33 sono i “coefficienti elettrostrittivi correlati al campo elettrico”. Nelle
equazioni si è tenuto conto che per un polimero isotropo il tensore delle costanti dielettriche si riduce ad una costante. Da quanto ricordato precedentemente, M13>0,
M23>0 e M33<0: ciò significa che se un campo elettrico è applicato attraverso lo spessore
(direzione z) di un film di polimero isotropo e con comportamento dielettrico lineare, il materiale si contrae lungo lo spessore e si espande lungo le due direzioni ortogonali a quest’ultimo.
Elettrostrizione di un polimero isotropo che presenti un comportamento dielettrico non lineare
E’ noto che la maggior parte dei polimeri presenta un comportamento dielettrico non lineare; da ciò si deduce pertanto che per polimeri con tale comportamento la deformazione percentuale è una funzione non lineare del campo elettrico applicato, e può presentare anche possibili fenomeni di saturazione ad alti valori del campo stesso.
1.6 Possibile coesistenza in ciascun polimero
elettroattivo di diversi fenomeni fisici inerenti al suo
comportamento attuativo
Nel precedente paragrafo sono stati posti in rassegna le quattro classi di polimeri elettroattivi di tipo elettrico, specificando per ciascuna di esse il fenomeno
(
0)
E P= ε−ε 2 33 2 2 0 33 3 2 23 2 0 23 2 2 13 2 0 13 1 ) ( ) ( ) ( E M E S S E M E S S E M E S S zz yy xx = − = = = − = = = − = = ε ε β ε ε β ε ε βfisico che meglio descrive il comportamento del materiale a seguito dell’applicazione di un campo elettrico.
Si precisa però che in ciascun polimero elettroattivo di tipo elettrico a seconda della sua struttura è possibile la coesistenza di fenomeni diversi, tra i quali comunque uno o più possono essere dominanti; infatti:
• In tutti i polimeri dielettrici è presente per sua natura l’effetto coulombiano, ossia
la deformazione del polimero indotta dalle forze elettrostatiche. Tale fenomeno però è evidentemente rilevante soltanto nei polimeri più morbidi, e pertanto nei polimeri elastomerici.
• In tutti i polimeri è presente l’effetto elettrostrittivo. Esso è però accentuato
soltanto da quei polimeri che possiedono una polarizzazione spontanea (oltre a quella che sarà indotta dal campo elettrico applicato) che possa essere riorientata dal campo elettrico, accentuando in tal modo l’effetto di deformazione che esso ha sul materiale.
1.7 Confronto tra diverse metodologie attuative
In questa sezione, dopo aver confrontato le diverse metodologie attuative esistenti, si parlerà dell’attuale stato delle conoscenze sulle proprietà attuative dei polimeri ferroelettrici elettrostrittivi e dei polimeri elastomerici. Inoltre si intende illustrare l’attuale stato dell’arte circa la realizzazione di attuatori a polimeri elastomerici.
Nella tabella seguente sono elencate le principali metodologie di attuazione esistenti, specificando per ciascuna di esse la categoria di attuatori che la rappresenta e gli svantaggi che caratterizzano il suo impiego.
Attivazione Attuatori Svantaggi
pneumatica pneumatici scomodità e ingombro termica • a memoria di forma
• ad espansione termica
basse velocità di risposta elettromagnetica bobine piccole pressioni attuative magnetica magnetostrittivi piccole deformazioni%
elettrostatici piccole pressioni attuative gel basse velocità di risposta
piccole pressioni attuative elettrica a polimeri elettroattivi ionici compositi polimero- metallo piccole deformazioni%
polimeri conduttori
basse velocità di risposta bassa efficienza nanotubi piccole deformazioni% elettrostrittivi piccole deformazioni% piezoelettrici piccole deformazioni% ferroelettrici eletrostrittivi piccole deformazioni% elettronici elastomeri dielettrici
Gli attuatori ad elastomeri dielettrici hanno il pregio
di poter generare le maggiori deformazioni fra tutti quelli sopra elencati; per tale motivo in questa tesi sono trattati attuatori
realizzati con quest’ultima classe di materiali.
Nella tabella a fianco riportata è presentato un confronto tra le
prestazioni ottenute con diverse metodologie di attuazione.
1.8 Attuazione ad elastomeri dielettrici
Sarà di seguito proposta una sintesi delle conoscenze sulle proprietà attuative dei principali elastomeri dielettrici.
Elastomeri poliuretanici
Gli elastomeri poliuretanici sono in grado di generare deformazioni dell’11% in spessore e del 12% in area con un campo elettrico applicato dell’ordine dei 160V/µm. Le pressioni esplicate sono dell’ordine di 1.6MPa. Alcuni studi hanno mostrato come il processo di deformazione per i poliuretani sia strettamente collegato alla presenza di dipoli mobili nelle catene che li compongono, che possono essere riorientati a seguito dell’applicazione di un campo elettrico.
Questa è una caratteristica che avvicina la classe degli elastomeri poliuretanici a quella dei polimeri ferroelettrici elettrostrittivi.
Una preventiva polarizzazione delle catene polimeriche nel piano del film può migliorare le prestazioni del poliuretano: questo procedimento facilita il riorientamento dei dipoli a seguito del campo successivamente applicato.
Sono stati compiuti studi su due tipi di poliuretano:
i) poliuretano di tipo polietere: a seguito dell’applicazione di un campo elettrico
mostra una variazione della costante dielettrica, senza generare deformazioni. ii) poliuretano di tipo poliestere: si è rivelato essere elettrostrittivo, pur conservando
inalterata la propria costante dielettrica.
Da ciò è stato dedotto che il tipo dei legami nelle catene polimeriche dato dai gruppi estere sia la causa dell’elettrostrizione nel poliuretano di tipo estere.
E’ stato calcolato che per gli elastomeri poliuretanici lo strain di Maxwell che si verifica a causa della semplice attrazione fra gli elettrodi rappresenta circa il 10% della deformazione effettivamente misurata sui film di polimero: questo conferma l’influenza che l’effetto puramente elettrostrittivo possiede nella deformazione risultante ottenibile da tali elastomeri.
Elastomeri siliconici
Sono i materiali in grado di raggiungere le più alte deformazioni, assieme agli acrilici: se sottoposti ad alti campi elettrici si comprimono fino ad oltre il 40% in spessore, espandendosi invece di circa il 60%÷90% in superficie.
Solitamente hanno alte velocità di risposta (tempi di risposta dell’ordine dei msec) all’applicazione del campo elettrico.
Pur essendo materiali dalla scarsa rigidezza essi possono sviluppare pressioni di attuazione dell’ordine di 0.4÷3MPa.
E’ presente in letteratura la descrizione di un attuatore planare realizzato con silicone Dow-Corning HS3 come dielettrico. I film di polimero sono stati preparati dissolvendo il materiale in un opportuno solvente (ad esempio la nafta) e sottoponendolo a centrifugazione ad alta velocità, in modo da ottenere fogli sottili e uniformi; tutto il processo è stato eseguito in una camera sterile per evitare la contaminazione del film polimerico da parte di impurità che possono causare rottura dielettrica a seguito dell’applicazione del voltaggio. Sono stati realizzati elettrodi deformabili in grasso grafitico. La figura seguente riporta i risultati della misure di deformazione in spessore effettuate su tale attuatore.
Come si può notare dalla figura, il modello in assenza di vincoli indica che in tale circostanza le deformazioni sarebbero molto più ampie: ciò mostra l’influenza che hanno i vincoli su ogni dispositivo.
La velocità di risposta degli elastomeri siliconici è stata stimata utilizzando una cella di carico: sono stati stimati tempi di risposta dell’ordine dei 4msec, sebbene questo
cella di carico stessa; essendo stato riscontrato che attuatori planari a silicone sollecitati in alternata sono in grado di generare frequenze udibili oltre i 10KHz, è stato ipotizzato che questi materiali possano avere un tempo di risposta al campo elettrico anche al di sotto del millisecondo.
Esistono in letteratura tentativi di realizzare, su film siliconici, elettrodi deformabili in oro. Per risultare deformabili, gli elettrodi devono essere il più possibile sottili: una soluzione è quella di depositare il metallo tramite sputtering (realizzando spessori al di sotto di 0.1µm), sebbene questa scelta limiti le deformazioni percentuali ottenibili al 4% circa, a causa della facilità di rottura degli elettrodi realizzati.
Elastomeri acrilici
E’ stato rilevato molto recentemente che un polimero acrilico venduto con il nome commerciale di nastro biadesivo VHB dalla ditta 3M (commercialmente noto e utilizzato per le sue caratteristiche di adesione e di resistenza al tempo, al calore e all’umidità) presenta notevoli proprietà elettroattive. Tale polimero è infatti un buon elastomero dielettrico e, tra i polimeri elettroattivi sino ad oggi noti, è quello in grado di generare le maggiori deformazioni a parità di campo elettrico applicato.