Capitolo 1
Generalità e metriche per gli oscillatori
In questo capitolo si presenta lo studio teorico sul quale si basa il funzionamento di un oscillatore. In particolare, ci soffermeremo sul fenomeno di generazione del “rumore di fase”. Sarà presa in esame la categoria di oscillatori controllati in tensione, detti VCO (voltage controlled oscillator), per i quali si riporteranno le principali metriche per la valutazione delle loro prestazioni.
1.1 Principi di funzionamento di un oscillatore
Un oscillatore è un circuito atto a generare una segnale di riferimento ad una data frequenza (detta portante per circuiti a radiofrequenza), tipicamente nell’ordine dei GHz.
Idealmente tale segnale dovrebbe essere composto da un’unica sinusoide alla frequenza desiderata. Praticamente invece, si assiste ad una leggera variazione nel tempo della frequenza del segnale generato. Tale variazione è dovuta al rumore generato internamente all’oscillatore.
L’utilizzo più comune nei circuiti a radiofrequenza, è quello di generare il segnale di riferimento (LO) per i mixer. In genere quindi, il rumore generato dall’oscillatore locale determina le prestazioni di rumore del mixer [1.1]. Per questo motivo è necessario ricercare architetture che riescano a garantire una bassa rumorosità, così da non compromettere le caratteristiche dell’intero sistema.
Solitamente un oscillatore è un circuito non lineare ed è quindi sottoposto, per sua natura, a generare una quantità di rumore notevole. Si può tuttavia fare una sostanziale distinzione tra rumore di ampiezza e rumore di fase. Infatti sebbene sia possibile realizzare un oscillatore con un elevato rumore di ampiezza, in realtà tutti gli oscillatori
stabilizza l’ampiezza dell’oscillazione. Per di più il segnale di riferimento, generato da un oscillatore locale, di fatto viene fatto passare attraverso un limitatore di ampiezza, che comunemente è realizzato internamente al mixer, e questo assicura che il mixer sia molto poco sensibile anche alle più piccole variazioni di ampiezza dell’oscillazione. Operando in questo modo il mixer è comunque ancora sensibile alle variazioni di fase del segnale di riferimento LO [1.2] [1.3] e quindi è di fondamentale importanza riuscire a minimizzare il rumore di fase (phase noise) generato dall’oscillatore locale.
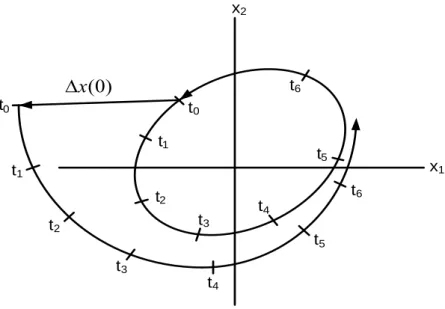
Naturalmente, se non ben progettato, un oscillatore può generare un alto livello di rumore di fase. Per capirne il perché, si può considerare la traiettoria stabile di un oscillatore nello spazio degli stati in Figura 1.1. Se in un certo istante di funzionamento t0, in cui l’oscillatore lavora su una traiettoria x(t), interviene un disturbo di tipo
impulsivo δ(t), l’oscillatore risponde portandosi a lavorare su una traiettoria x(t)+δ(t). Poiché l’oscillatore è stabile e la durata del disturbo è comunque limitata, la deviazione in ampiezza tende a decadere ed il circuito tende a tornare a lavorare sull’orbita precedente (stato stabile). Questo avviene come naturale conseguenza della natura non lineare del circuito. Si deve inoltre sottolineare che, essendo l’oscillatore un circuito autonomo, una sua soluzione traslata nel tempo, è ancora una soluzione circuitale valida. Quindi una volta che la fase è stata perturbata, l’oscillatore continua a lavorare come se il disturbo non fosse pervenuto. Più semplicemente si può dire che le perturbazioni di ampiezza tendono a decadere, mentre quelle di fase si accumulano.
t0 t0 t1 t1 t2 t2 t3 t3 t4 t4 t5 t5 t6 t6 (0) x Δ x1 x2
1.2 Modelli per oscillatori
Prima di approfondire i meccanismi di formazione del rumore di fase, si presentano le due schematizzazioni più comuni che si adottano per spiegare il funzionamento di un oscillatore. Tali modelli sono il “2-port” e il “1-port” [1.4], quest'ultimo sarà quello utilizzato nel proseguimento del lavoro.
1.2.1 Mo
dello “2-port”
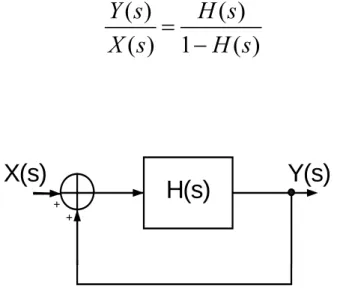
Una delle possibili interpretazioni dello schema di un oscillatore, è quella di un circuito chiuso in reazione, tale modello è definito “2-port” in quanto la reazione si chiude attraverso la rete a due porte H(s) come mostrato in Figura 1.2. In tale schema si consideri il sistema lineare reazionato, la cui funzione di trasferimento è data da :
( )
( )
( ) 1
( )
Y s
H s
X s
=
−
H s
(1)H(s)
X(s)
Y(s)
+ +Figura 1.2: Oscillatore come sistema reazionato
Per far si che il sistema produca in uscita un’oscillazione stabile devono essere verificate le condizioni di Barkhausen :
0
(
)
1
H j
ω
=
(2) 0(
) 0
oH j
ω
∠
=
(3)Tali condizioni sono soltanto necessarie ma non sufficienti.
In molti casi una semplice reazione non produce i risultati voluti e si inserisce una rete selettiva come mostrato in Figura 1.3. Tale rete, detta anche “risonatore”, ha il compito di stabilizzare la frequenza e può anche risultare parte del blocco H(s).
H(s)
X(s)
Y(s)
+ + Rete SelettivaFigura 1.3: “2-port” con rete selettiva
1.2.2 Modello “1-port”
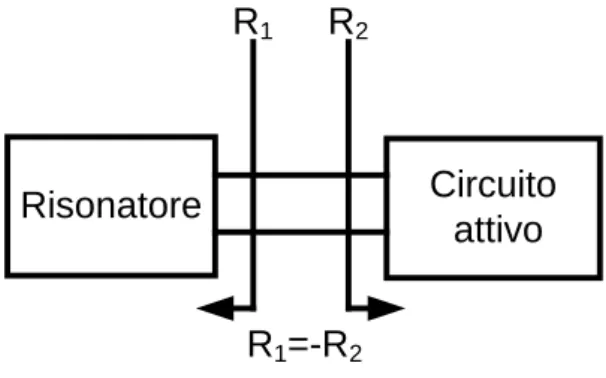
L’altro tipo di astrazione, che risulta particolarmente adatto per spiegare il funzionamento degli oscillatori armonici, è quello cosiddetto “1-port”. Stavolta si considera l’oscillatore come composto da due reti ad una sola porta collegate fra loro come mostrato in Figura 1.4, una di esse consiste in un risonatore con perdite, l’altra è un circuito attivo.
Risonatore Circuito
attivo R1 R2
R1=-R2
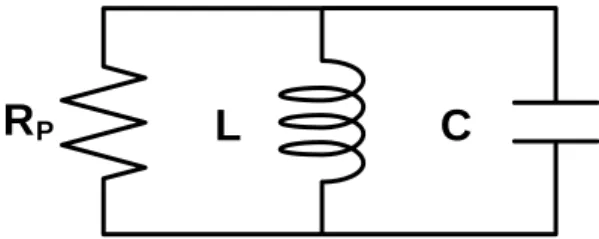
In generale, in una banda di frequenza stretta, un risonatore può essere rappresentato da una rete RLC parallelo come in Figura 1.5. Si può facilmente intuire che da solo tale circuito non potrà oscillare indefinitivamente, perché parte dell’energia immagazzinata nel circuito viene comunque dissipata su RP. L’idea è quindi quella di aggiungere una
opportuna rete attiva che presentando una resistenza negativa –RP, fa si che la resistenza
equivalente parallelo risulti infinita e si annullino in questo modo le perdite nel circuito.
R
PL
C
Figura 1.5: Schematizzazione a banda stretta di un risonatore
1.3 Rumore negli oscillatori
Si esamina adesso più a fondo la questione legata al rumore generato internamente ad un oscillatore [1.5]. Facciamo ancora riferimento al modello “1-port”, in cui la rete detta risonatore è schematizzata come in Figura 1.5. Per semplificare le cose possiamo supporre che la rete attiva sia priva di sorgenti di rumore, in questo caso il solo elemento rumoroso rimane la resistenza RP del risonatore. L’energia ERLC immagazzinata negli
elementi reattivi del risonatore vale :
2
2
1
PK RLCCV
E
=
(4)Dove VPK è la tensione misurata ai capi della resistenza RP. Assumendo che tale tensione
abbia una forma d’onda sinusoidale, si ottiene una tensione quadratica media:
C
E
V
RLC sig=
2 (5)Integrando la densità spettrale di potenza del rumore termico dovuto al resistore RP , nella
banda del risonatore, si ottiene il valor quadratico medio della tensione di rumore (total mean-square noise voltage):
2 2 0
( )
1
4
4
4
n P P P PZ f
kT
V
kTR
df
kTR
R
R C
C
∞=
∫
=
⋅
=
(6)Utilizzando [7] e [8] si può definire un rapporto rumore-segnale :
RLC sig n
E
kT
V
V
S
N
=
=
2 2 (7)In generale per un risonatore, si può definire il fattore di merito Q come rapporto tra l’energia immagazzinata e l’energia dissipata in un ciclo:
diss RLC
P
E
Q
=
ω
(8)Dove Pdiss rappresenta la potenza dissipata in un ciclo, ed ω=2πf è la pulsazione.
Infine, dalle relazioni (7) e (8) si ricava :
diss
N
kT
S
Q P
ω
⋅
=
⋅
(9)Nonostante in questo semplice modello la potenza dissipata sia dovuta alle sole perdite su RP, queste relazioni risultano ancora valide, seppur in modo approssimato, per gli
oscillatori reali e come si può facilmente capire dalla (9), si spiega la necessità di massimizzare il Q del risonatore allo scopo di minimizzare il rumore prodotto in uscita dal circuito.
1.4 Il Rumore di fase
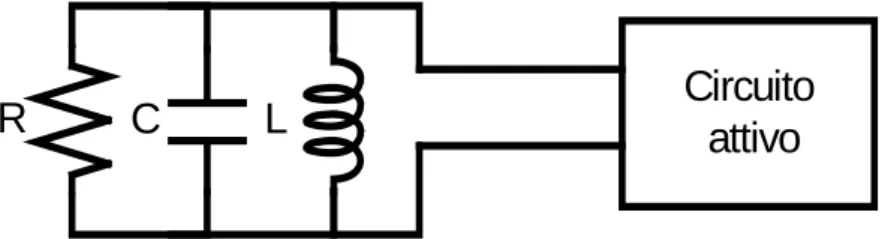
Approfondiamo la trattazione andando a spiegare il meccanismo di formazione del rumore di fase. A tale scopo si utilizza ancora la schematizzazione 1-port e si assume che l’uscita del circuito di figura (1.6) sia la tensione misurata ai capi della gruppo RLC. Per semplicità di lettura non faremo troppa distinzione tra frequenza e pulsazione conoscendo la diretta relazione che le lega.
Circuito
attivo
R
C
L
Figura 1.6: Oscillatore schematizzato come modello 1-port
Per definizione la sola sorgente di rumore presente è rappresentata dal rumore bianco, di natura termica, dovuto alla conduttanza del resistore R. Tale fonte di rumore viene tipicamente schematizzata con un generatore di corrente con una densità spettrale quadratica media ( mean-square spectral density), posto in parallelo al resistore (G=1/R):
2
4
ni
kTG
f
=
Δ
(10)Moltiplicando questa corrente di rumore per l’impedenza vista dal generatore di corrente si ottiene una tensione di rumore. Nel calcolo dell’impedenza si deve sottolineare il fatto che la rete attiva deve contribuire al pari di una resistenza negativa in modo da cancellare precisamente la resistenza R. Stando così le cose, l’impedenza effettivamente vista dal generatore di corrente di rumore è semplicemente una rete LC ideale, priva di perdite.
L’impedenza Z(ω) di una rete LC parallelo, valutata ad una pulsazione distante Δω dalla pulsazione di risonanza ω0, può essere approssimata da :
0 0 0 0
(
)
2
L
Z
ω
ω
j
ω
ω
ω
+ Δ
≈ ⋅
Δ
(11)L’espressione del fattore di merito QRLC del risonatore è:
0 0
1
RLCR
Q
L
GL
ω
ω
=
=
(12) Combinando la (11) e la (12), si ottiene :(
)
0 01
2
Z
G
Q
ω
ω
ω
ω
+ Δ
=
⋅
Δ
(13)Moltiplicando la (10) per il quadrato del modulo dell’impedenza sopra calcolata (13), si ottienela densità spettrale di potenza di rumore:
2 2 2 2 0
4
2
n nv
i
Z
kTR
f
f
Q
ω
ω
⎛
⎞
=
⋅
=
⎜
⎟
Δ
Δ
⎝
Δ
⎠
(14)La densità spettrale di potenza di rumore in uscita risulta dipendente dalla pulsazione (frequenza) a causa dell’azione filtrante del gruppo LC, diminuendo con l’inverso del quadrato della pulsazione (frequenza) di offset. L’andamento 1/f2 semplicemente rispecchia il fatto che la risposta in frequenza della tensione ai capi del gruppo RLC, dovuta alla sorgente di rumore di corrente, decade come 1/f , e la potenza è proporzionale al quadrato della tensione. Si può ancora una volta constatare che mantenendo costanti tutti gli altri parametri, all’aumentare del fattore di merito Q la densità spettrale di rumore diminuisce.
Nel nostro modello semplificato, il rumore termico influisce sia sul rumore di ampiezza che su quello di fase, e la relazione appena trovata include ambedue gli effetti.
Dalla termodinamica, il teorema di equipartizione dell’energia ci dice che, all’equilibrio, le potenze di rumore di ampiezza e di fase si equivalgono. D’altra parte il meccanismo che limita l’ampiezza di uscita, presente in un qualsiasi oscillatore reale, rimuove metà del rumore dato dalla (14).
Tradizionalmente si normalizza la (14) con la tensione quadratica media della portante (mean-square carrier voltage) e si riporta il rapporto in decibel. Attuare tale normalizzazione porta alla definizione della quantità L{Δf} detta “rumore di fase” (phase noise):
{ }
10log
2
0 22
sigkT
L
f
P
Q
ω
ω
⎡
⎛
⎞
⎤
Δ =
⎢
⎜
⎟
⎥
Δ
⎝
⎠
⎢
⎥
⎣
⎦
(15)Il rumore di fase viene espresso in dBC/Hz (decibel per hertz) e viene calcolato ad un
dato offset di frequenze dalla portante (che in genere è 100 kHz e/o 1 Mhz). Ad esempio si può parlare di un oscillatore a 2 Ghz con rumore di fase di -100 dBc/Hz @ 100 kHz dalla portante.
L’equazione (15) dice che il rumore di fase (ad un dato offset) diminuisce all’aumentare del fattore di merito Q e della potenza della portante. Queste dipendenze sono piuttosto sensate: aumentare la potenza di segnale migliora il rapporto, semplicemente perché il rumore termico è fissato, mentre aumentare il Q fa diminuire in modo quadratico il rapporto perché migliora la selettività del filtro RLC.
Poiché sono state fatte alcune significative semplificazioni non deve sorprendere che l’andamento dello spettro predetto dalla (15) risulti diverso da quello tipicamente misurato. Ad esempio, sebbene lo spettro reale presenti una regione dove la densità è proporzionale ad 1/(Δω)2, l’ampiezza è in genere maggiore di quella indicata dalla
relazione trovata analiticamente perché sussistono altre, non trascurabili, fonti di rumore oltre a quella considerata. Infatti una qualsiasi implementazione fisica di una rete attiva, introdurrà un’ulteriore sorgente di rumore. Inoltre lo spettro realmente misurato, all’aumentare dell’offset dalla portante, tende ad un valore costante invece che continuare a decadere quadraticamente. Infine si ha una regione con dipendenza 1/(Δω)3 per bassi
valori di offset. Per modellare tutti questi effetti l’espressione di L{Δω} si modifica nel seguente modo:
{ }
3 2 1/ 02
10log
1
1
2
f sigFkT
L
P
Q
ω
ω
ω
ω
ω
⎡
⎧
⎪
⎛
⎞
⎫
⎪
⎛
Δ
⎞
⎤
⎢
⎥
Δ
=
⎨
+
⎜
⎟ ⎜
⎬
⎜
+
⎟
⎟
Δ
Δ
⎢
⎪
⎩
⎝
⎠
⎪⎝
⎭
⎠
⎥
⎣
⎦
(16)Queste correzioni, dovute a Leeson (1966), consistono in un fattore F per tener conto dell’ampiezza maggiore del rumore nella zona 1/(Δω)2, nell’unità (all’ interno delle
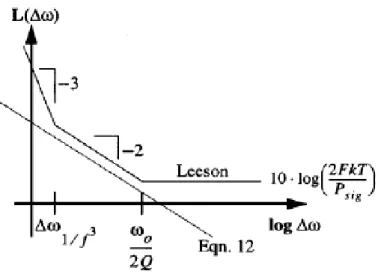
parentesi graffe) per avere la zona piatta per alti offset, ed un ulteriore fattore moltiplicativo per ottenere una zona con andamento 1/(Δω)3 per offset sufficientemente piccoli. L’andamento della (16) e’ mostrato in figura 1.7 :
Figura 1.7: Phase noise secondo il modello di Leeson.
E’ importante sottolineare che il fattore F e’ un parametro risultante da un fitting su dati empirici e quindi si deve ricorrere a delle misure per poterlo determinare.
Inoltre il modello asserisce che Δω1/f3, ovvero l’offset per il quale si ha il passaggio da un
andamento di tipo 1/(Δω)3 ad uno di tipo 1/(Δω)2, corrisponde precisamente alla pulsazione (frequenza) d’angolo di rumore del dispositivo. Misurazioni hanno dimostrato che tale uguaglianza non è quasi mai verificata, ed in pratica anche Δω1/f3 deve essere
considerato un parametro empirico risultante da un’operazione di fitting. In ogni caso da questo tipo di studio non risulta ben chiaro quale sia la frequenza d’angolo da considerare nel caso ci siano più sorgenti di rumore con contributo 1/f. Infine la frequenza alla quale il rumore raggiunge la zona piatta, non sempre è data dalla metà della banda del risonatore.
L’importante informazione che esce dal modello di Leeson è che incrementare Q e/o l’ampiezza del segnale del segnale di uscita porta ad una diminuzione della rumore di fase sul segnale generato dal circuito.
1.5 VCO e metriche di confronto
Per valutare la bontà delle prestazioni offerte da un oscillatore controllato in tensione (VCO), i parametri che in letteratura si prendono in considerazione sono:
• Frequenza di oscillazione e Tuning Range: il Tuning Range è l’intervallo di frequenza all’interno del quale il VCO, opportunamente innescato, produce un’oscillazione stabile. Tipicamente viene espresso in percentuale rispetto alla frequenza centrale di lavoro.
• Rumore di fase: questa quantità, discussa nel paragrafo precedente, costituisce la variazione di fase nel periodo.
• VDD: la tensione di alimentazione del circuito.
• Tecnologia
• Potenza dissipata
• Parametri degli induttori: in un oscillatore armonico è importante il valore L delle induttanze utilizzate, ed il relativo fattore di merito Q.
• FOMT : per operare un confronto tra lavori di tipo diverso, molti articoli presenti
in letteratura propongono un unico parametro FOMT, che possa riassumere la
{ }
20log
010log
10log
1
DC T DDf
P
Tu
FOM
L f
f
mW
V
⎛
⎞
⎛
⎞
=
Δ −
⎜
⎟
+
⎜
⎟
−
Δ
⎝
⎠
⎝
⎠
Dove:•
f
0 : è la frequenza centrale di oscillazione•
Δf
: è l’offset di frequenza dalla frequenza centrale•
L{Δf}
: è il rumore di fase calcolato ad una frequenza distante Δf da quella centrale•
P
DC:
è la potenza dissipata•
Tu
: è il tuning range•
V
DD: è il valore dell’alimentazione usata.Per come viene calcolato, il FOMT è un numero negativo. Il lavoro è tanto migliore
quanto minore risulta tale parametro.
1.6 Commenti
Alla base di un circuito per le radiofrequenze sta la realizzazione di un oscillatore locale a bassa rumorosità. Per quanto esaminato, una condizione necessaria per abbassare la rumorosità di un oscillatore è quella di disporre induttori integrati ad alto fattore di merito. Purtroppo realizzare fisicamente tali dispositivi, unicamente utilizzando processi standard di integrazione, non è così ovvio. Un’alternativa che si sta facendo strada in letteratura, e che verrà esaminata in questo lavoro di tesi, è quella di far ricorso ad un circuito attivo che presenta l’analogo comportamento in frequenza di un induttore integrato ad alto fattore di merito.