2
2
LA PROPULSIONE ELETTTRICA
2.1 Introduzione
Nell’ambito della propulsione spaziale rivestono tuttora un ruolo di primo piano i motori chimici, grazie alla solida esperienza acquisita nel tempo con la sperimentazione e l’impiego in missioni operative. Propulsori di questo tipo hanno però dei limiti intrinseci, legati essenzialmente alla natura delle reazioni chimiche, che ne limitano la quantità d’energia per unità di massa di propellente che può essere rilasciata durante la combustione. Prima diretta conseguenza di questa limitazione è una velocità di scarico piuttosto bassa, con la necessità, quindi, di un elevato consumo di combustibile per ottenere un dato livello di spinta. Inoltre l’esigenza di poter ridurre la massa dell’apparato propulsivo e del propellente da esso utilizzato ha indirizzato verso lo studio di sistemi propulsivi alternativi ai tradizionali motori chimici.
I propulsori elettrici, aventi velocità di scarico fino a 100 volte maggiori di quelle dei più evoluti motori chimici, possono ritenersi promettenti candidati per il raggiungimento dei suddetti obiettivi.
L’utilizzo della propulsione chimica è tuttavia ancora dominante poiché la maggior parte dei motori elettrici studiati si trova tuttora in una fase di sperimentazione e sviluppo ed esistono ancora notevoli problematiche di natura fisica e tecnologica che devono essere analizzate con maggiore attenzione. Alcuni esempi di problemi da affrontare riguardano la capacità di sviluppare impianti di generazione di potenza di dimensioni più contenute, la comprensione dei fenomeni fisici alla base
dell’usura dei componenti critici e la conoscenza dei fenomeni di instabilità che limitano l’ambito dei regimi operativi ottenibili.
Nonostante ciò la propulsione elettrica può fornire soluzioni che appaiono decisamente promettenti per lo svolgimento di particolari missioni, come ad esempio quelle interplanetarie, e l’esecuzione di specifiche operazioni quali il controllo orbitale e di assetto di satelliti.
2.2 Generalità sulla propulsione spaziale
Il moto di un veicolo spaziale, nell’ipotesi che l’unica forza agente sia la forza propulsiva del motore, può essere descritto dall’equazione del moto:
(2.1) dove m massa totale del veicolo
vettore accelerazione
derivata temporale della massa del veicolo velocità equivalente di scarico
Il termine a secondo membro viene comunemente denominato come spinta del sistema propulsivo:
(2.2) Appare evidente da questa definizione la modalità con cui viene generata la spinta in un propulsore spaziale, ovvero tramite l’espulsione nella direzione opposta al moto di un certo quantitativo di propellente (derivata della massa rispetto al tempo) opportunamente accelerato ad una certa velocità (ue).
L’integrale della spinta, calcolato dall’istante di accensione all’istante di spegnimento del motore, è detto impulso totale:
Dovendo compiere una missione che richiede un impulso elevato risulta conveniente cercare di aumentare la velocità di scarico ue piuttosto
che ricorrere all’impiego di un grosso quantitativo di propellente che comporterebbe limitazioni alla massa del carico utile da poter imbarcare sul sistema spaziale.
Considerando che ue sia costante, la (2.1) può essere integrata nella
seguente forma:
∆ ln (2.3)
dove ∆v incremento di velocità del velivolo m0 massa iniziale del veicolo
mb massa del veicolo al termine della fase
propulsiva
La (2.3) è comunemente nota come equazione di Tsiolkovsky. Essa può essere opportunamente invertita per ricavare la frazione di massa di propellente mp (= m0 - mb) necessaria per eseguire un determinato
incremento di velocità ∆v: ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = ∆ − e u v p e m m 1 0 (2.4)
Generalmente, al posto della velocità di scarico equivalente si è soliti utilizzare l’impulso specifico Isp, definito come il rapporto tra la spinta e la
portata in peso del propellente:
0 0 g u g m u m I e e sp = = & & (2.5)
dove con g0 si è indicata l’accelerazione di gravità al livello del mare.
Dalla (2.4) si può notare che, per limitare l’uso di grossi quantitativi di propellente, è preferibile che il valore della velocità di scarico equivalente ue sia dello stesso ordine di grandezza del ∆v che si vuole ottenere. Ogni
tipologia di missione spaziale è caratterizzata da un certo ∆v ideale che riassume tutto il reale consumo energetico necessario per portare a termine tale missione. In Figura 2.1 sono riportati alcuni esempi di missioni con indicato il rispettivo valore del ∆v.
Missione m/s da LEO a velocità di fuga dalla Terra 3200
da LEO ad orbita lunare ( 7 giorni ) 3900
da LEO ad orbita di Marte ( 0.7 anni ) 5700 da LEO ad orbita di Marte (40 giorni ) 85000 da LEO ad orbita di Nettuno ( 29.9 anni ) 13400
Figura 2.1 Incrementi di velocità per tipiche missioni da orbita bassa (= 270 Km)
Nei propulsori chimici la velocità di scarico ha dei limiti ben determinati dovuti essenzialmente ai seguenti motivi:
- la reazione di combustione può rendere disponibile un quantitativo energetico ben preciso, e questo si ripercuote essenzialmente in un limite per la temperatura massima ottenibile
- solo una parte dell’energia può essere convertita in un aumento di entalpia del gas che genera la spinta, a causa di perdite di natura radiativa e nei moti propri delle molecole (flusso congelato) che sono difficilmente eliminabili
- le sollecitazioni termiche in corrispondenza di particolari zone critiche del motore non possono andare oltre certi limiti di natura strutturale.
Per missioni caratterizzate da un elevato valore del ∆v risulta quindi improponibile l’utilizzazione di un propulsore di tipo chimico. L’uso dell’energia elettrica per l’accelerazione di un opportuno fluido di lavoro e la conseguente generazione di spinta risulta decisamente interessante in questo ambito poiché i processi accelerativi utilizzati consentono l’ottenimento di velocità di scarico decine di volte superiori rispetto ai propulsori chimici convenzionali.
2.3 La propulsione elettrica
La principale differenza fra propulsori di tipo chimico e propulsori di tipo elettrico consiste nel modo con il quale si fornisce l’energia al propellente. Mentre nei motori chimici la fonte di energia risiede nel fluido di lavoro stesso tramite la reazione esotermica che provoca l’aumento dell’entalpia del gas, nei propulsori elettrici la fonte di energia è esterna e non esistono limitazioni fisiche alla quantità di energia che è possibile trasferire nel fluido di lavoro.
I propulsori elettrici richiedono quindi la presenza di un impianto di generazione di potenza che fornisca in modo opportuno l’energia necessaria al propellente. L’inserimento di questo nuovo componente (non necessario in un motore chimico) nell’apparato propulsivo può però portare ad una forte penalizzazione. Infatti, volendo incrementare notevolmente la velocità di scarico, si avrà bisogno di un impianto sempre più grande e gravoso in termini di massa aggiunta, tanto più quanto maggiore sarà la richiesta energetica.
Nella scelta se utilizzare o meno un propulsore elettrico si dovrà quindi valutare questo aspetto; lo si fa introducendo un nuovo parametro, il rendimento di spinta η, così definito:
P T u P u m e e 2 2 2 ⋅ = ⋅ = &
η
(2.6)dove con P si è indicata la potenza elettrica immessa nel motore.
Si definisce la massa specifica α come la massa dell’impianto di potenza per unità di potenza elettrica generata:
P
m pot
=
α
(2.7)Per una missione di durata ∆t, ipotizzando che di mantenere la spinta T costante, la massa di propellente necessaria è inversamente proporzionale all’impulso specifico:
0 g I t T u t T t m m sp e p ⋅ ∆ = ∆ = ∆ = & (2.8)
Dalle (2.6) e (2.7) si ricava inoltre la seguente espressione per la massa dell’impianto di potenza mp:
η
α
α
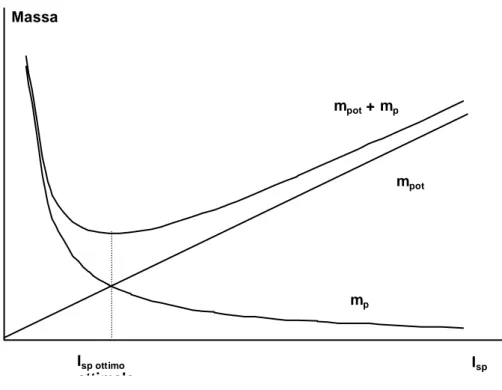
⋅ ⋅ ⋅ ⋅ = ⋅ = 2 0 sp pot I T g P m (2.9)Riportando in un grafico le due espressioni (2.8) e (2.9) si può evidenziare la presenza di un valore ottimo dell’impulso specifico Isp in
corrispondenza del quale si ha un minimo per la somma della massa del propellente e dell’impianto di potenza.
Isp Massa Isp ottimo ottimale mp mpot mpot + mp
Figura 2.2 Impulso specifico ottimale
Tale valore ottimo dipende dal parametro di massa α, dal rendimento di spinta η e dalla durata della missione ∆t:
2 / 1 0 2 1 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ∆ ⋅ =
α
η
t g Isp (2.10)Spingendo Isp oltre tale valore di ottimo, la massa del generatore di
potenza diventa eccessivamente gravosa. Risulta evidente dall’espressione di Isp la necessità di avere alti rendimenti di spinta e basse masse specifiche
dei generatori di potenza.
2.4 Classificazione dei motori elettrici
I propulsori elettrici sfruttano l’energia elettrica fornita da un generatore di potenza sia per scaldare il propellente e farlo espandere in un ugello, sia per accelerare il gas ionizzato attraverso forze elettriche e/o magnetiche.
Nel presente paragrafo si descrivono gli schemi di funzionamento delle principali tipologie di motori elettrici in relazione al particolare processo accelerativo utilizzato sul fluido di lavoro.
2.4.1 Propulsori elettrotermici
I propulsori elettrotermici sfruttano l’energia elettrica per scaldare ad elevate temperature il fluido di lavoro che viene poi accelerato in un ugello. La velocità di scarico, come per i propulsori chimici, è proporzionale alla quantità Tc/µ . La spinta che si ottiene è quindi frutto di un processo accelerativo di tipo gasdinamico.
Le loro limitazioni sono legate a problemi di realizzazione dovuti agli elevati carichi termici.
Il riscaldamento può essere ottenuto tramite l’utilizzo di un elemento resistivo, che funge da riscaldatore, posto in contatto diretto o indiretto con il gas da espandere e portato ad alta temperatura per effetto Joule (in questo caso si ha a che fare con un resistogetto) oppure facendo scoccare un arco elettrico tra due elettrodi e sfruttando l’energia termica associata a questo fenomeno per riscaldare il gas (si parla in questo caso di arcogetto). Nelle Figure 2.3 e 2.4 si riportano gli schemi rispettivamente di un resistogetto e di un arcogetto.
Il resistogetto è caratterizzato da impulsi specifici dell’ordine di 300 secondi e ha il vantaggio di poter utilizzare praticamente ogni genere di fluido di lavoro. L’elemento riscaldante può essere posto o meno a diretto contatto col fluido.
Figura 2.3 Schema di un resistogetto ad idrazina
Nel primo caso lo scambio di calore avviene direttamente tra il fluido e la resistenza, con una migliore efficienza termica ma con un peggioramento delle condizioni operative dell’elemento resistivo e una conseguente diminuzione della sua vita operativa. Nel secondo caso resistenza e fluido sono tenuti separati per mezzo di un terzo elemento (tipicamente il fluido viene fatto scorrere all’interno di un tubo contro-avvolto con la serpentina resistiva), con un peggioramento dell’efficienza di scambio termico ma un miglioramento per quanto riguarda usura e corrosione dei componenti.
Un aspetto critico di questo tipo di propulsore sono le alte temperature raggiunte da alcuni componenti del motore che possono risultare un parametro di progetto da considerare con molta attenzione.
Nell’arcogetto il fluido di lavoro scambia calore con l’arco elettrico generato dal catodo e che, tramite un opportuno canale di stabilizzazione chiamato costrittore, si attacca sulla superficie dell’anodo.
Il profilo della temperatura presenta una zona centrale con valori molto elevati mentre avvicinandosi alla parete dell’anodo diminuisce abbastanza rapidamente consentendo quindi l’ottenimento di un più efficace riscaldamento del propellente rispetto al resistogetto senza raggiungere temperature critiche per i componenti del motore. Con gli arcogetti si ottengono impulsi specifici massimi di circa 1500 secondi.
Sia nel resistogetto che nell’arcogetto permangono comunque le limitazioni di tipo gasdinamico viste nel caso dei propulsori chimici; infatti la natura del processo accelerativo richiede, per l’ottenimento di velocità di scarico più elevate, l’innalzamento della temperatura del fluido di lavoro con conseguenti problematiche legate al surriscaldamento di parti del motore.
2.4.2 Propulsori elettrostatici
Un propulsore elettrostatico sfrutta l’energia di un campo elettrico per accelerare un fascio di ioni. Schematicamente un simile propulsore è formato da:
- un emettitore di ioni (un dispositivo che prende in ingresso il fluido di lavoro e ne tramuta le molecole in ioni);
- un acceleratore, opportunamente posto ad un potenziale inferiore all’emettitore per accelerare gli ioni;
- un neutralizzatore, per restituire al fascio ionico accelerato gli elettroni precedentemente tolti e ristabilire così la neutralità di carica.
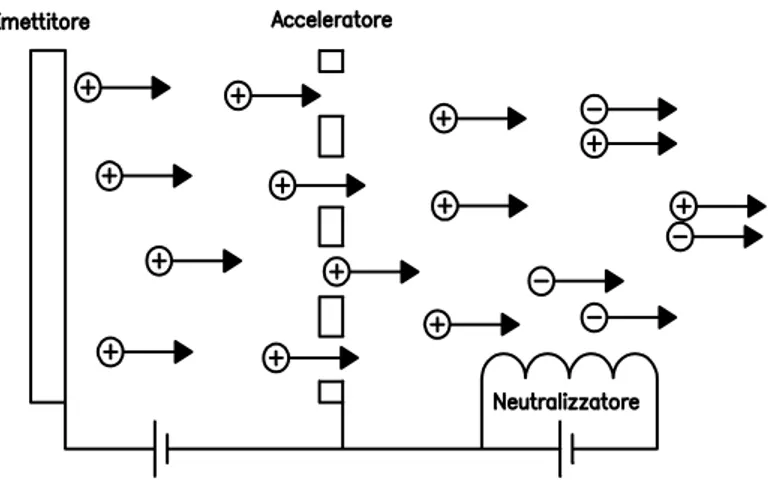
Lo schema di funzionamento di un propulsore elettrostatico è riportato in figura 2.5.
Figura 2.5 Schema costruttivo di un motore elettrostatico
Gli ioni emessi dalla superficie dell’emettitore vengono accelerati in direzione di una griglia acceleratrice sotto l’azione di un campo elettrico generato dalla differenza di potenziale esistente tra emettitore e elettrodo acceleratore. Una volta superata la griglia, gli ioni si ricombinano con elettroni opportunamente generati da un neutralizzatore in modo da mantenere la neutralità globale del dispositivo ed evitare movimenti di carica indesiderati.
Gli impulsi specifici ottenibili con propulsori di questo tipo sono dell’ordine di 3000÷6000 secondi con rendimenti di spinta molto elevati (η≅0.8) a seconda del meccanismo di generazione degli ioni.
Tra i vari tipi di propulsori elettrostatici, nel propulsore a bombardamento elettronico (Figura 2.6) gli ioni vengono prodotti per mezzo di collisioni di tipo elettrone-neutro. Con riferimento alla Figura 2.6, gli elettroni vengono emessi da un catodo per effetto termoelettrico. Tali elettroni vengono attratti verso l’anodo cilindrico, posto ad un potenziale più alto rispetto al catodo, ma sono impediti dal raggiungerlo dal campo magnetico generato da una serie di magneti anulari, che li costringe ad un moto a spirale fino alla collisione con un atomo di propellente. Gli ioni così prodotti sono poi collimati sui fori della griglia acceleratrice tramite uno schermo, posto immediatamente a monte, impostato ad un potenziale maggiore rispetto all’elettrodo acceleratore.
Catodo cavo Schermo collimatore Griglia acceleratrice
Figura 2.6 Schema di un motore a bombardamento elettronico
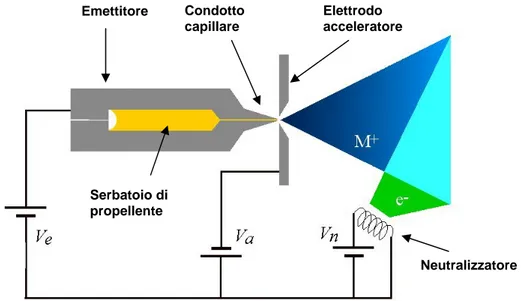
Un particolare tipo di propulsore elettrostatico che risulta molto promettente per gli elevati impulsi specifici che fornisce è il cosiddetto propulsore ad effetto di campo o più semplicemente FEEP (Field Emission Electric Propulsion) descritto schematicamente in Figura 2.7.
Gli elettroni vengono estratti dal propellente liquido (tipicamente Cesio) che si trova in un condotto capillare (di pochi µm) tramite l’azione di un forte campo elettrico generato dalla differenza di potenziale instaurata tra due elettrodi. Una volta che gli elettroni sono stati liberati è lo stesso campo elettrico che provvede ad accelerarli consentendo quindi l’ottenimento di una forza propulsiva.
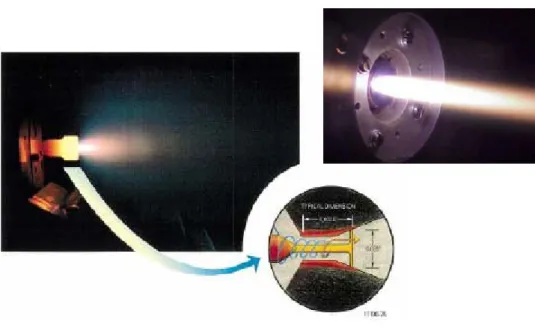
In Figura 2.8 si riportano delle immagini di un propulsore FEEP durante lo sparo. Magneti ad anello Linee di campo magnetico Aliment. Anodo Aliment. Schermo Aliment. Griglia Aliment. Neutral. Neutralizzatore
Figura 2.7 Schema costruttivo di un motore FEEP
I propulsori FEEP sono caratterizzati da alti rendimenti di spinta, dell’ordine di 0.9, con impulsi specifici che arrivano fino a 9000 secondi.
Figura 2.8 Propulsore FEEP assemblato (sinistra) e durante lo sparo (destra)
Emettitore Condotto capillare Elettrodo acceleratore Neutralizzatore Serbatoio di propellente
2.4.3 Propulsori elettromagnetici
Nella propulsione elettromagnetica il processo accelerativo è una conseguenza dell’interazione di un plasma con un campo elettrico e un campo magnetico. Il fluido di lavoro viene ionizzato dallo scoccare di una scarica elettrica tra due elettrodi posti ad una elevata differenza di potenziale. L’accelerazione avviene per l’interazione della corrente prodotta nella scarica con il campo magnetico autoindotto dal processo stesso oppure con un campo magnetico applicato esternamente.
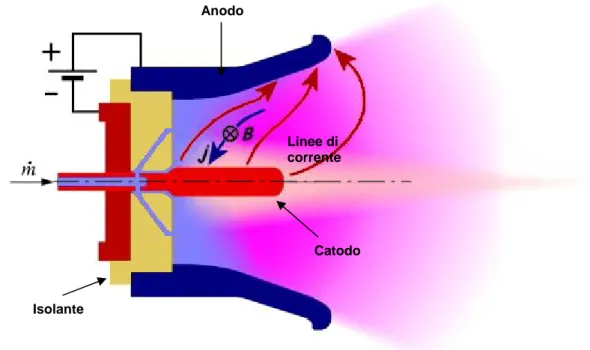
Lo schema di un motore MPD (Magneto-Plasma-Dinamico) a campo magnetico autoindotto è rappresentato in Figura 2.8. In questo propulsore la spinta viene generata per effetto della forza di Lorentz che nasce dall’interazione tra la componente radiale della corrente di scarica e la componente azimutale del campo magnetico autoindotto.
Figura 2.8 Schema di un motore MPD a campo magnetico autoindotto
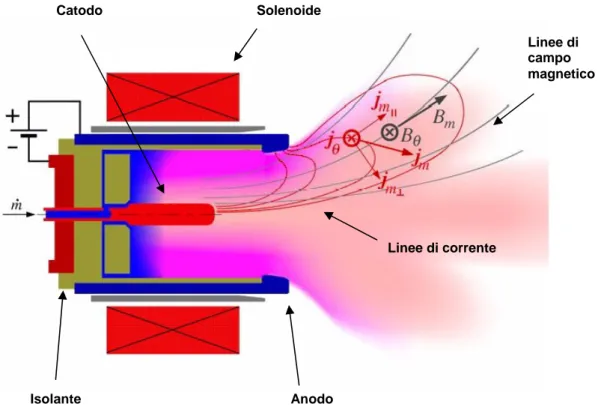
In un propulsore MPD con campo magnetico esterno, la situazione cambia in modo considerevole (Figura 2.9). Rispetto al modello precedente, si nota immediatamente la presenza di un solenoide, avvolto all’esterno dell’anodo, che si occupa di fornire il campo magnetico desiderato.
Anodo
Linee di corrente
Catodo
Il forte campo magnetico assiale ostacola il flusso di elettroni verso l’anodo, forzandoli a seguire traiettorie che si protraggono ben a valle della sezione di uscita. Nelle zone dove le linee di corrente curvano assumendo una componente radiale più marcata, la forza di Lorentz presenta una componente azimutale, che aiuta il sostentamento del moto spiraleggiante degli elettroni. La corrente generata da questo moto, provocata dall’interazione fra campo elettrico e campo magnetico e quindi definibile come corrente di Hall, interagisce con il campo magnetico dando vita, nelle regioni dove il campo diverge, ad una componente assiale di spinta.
In questo tipo di propulsori si può quindi differenziare la spinta in due componenti essenziali, una dovuta all’interazione lorentziana (sulla quale si basa il modello a campo autoindotto) e una dovuta all’effetto Hall generato dal campo magnetico esterno.
Figura 2.9 Schema di un motore MPD a campo magnetico applicato
Linee di campo magnetico Linee di corrente Solenoide Catodo Isolante Anodo
In Figura 2.10 è invece riportato lo schema di funzionamento di un propulsore ad effetto Hall. Il campo magnetico, generato da due magneti circolari, ha componente prevalentemente radiale. Gli ioni, creati all’interno della camera di ionizzazione tramite collisioni elettrone-neutro, vengono accelerati da un campo elettrico in direzione del catodo. Gli elettroni, sotto l’azione combinata del campo elettrico assiale e del campo magnetico radiale, si muovono all’interno della camera di ionizzazione anulare con un moto di deriva azimutale spiraleggiante. La presenza di questi elettroni favorisce il proseguimento della ionizzazione del propellente immesso dall’anodo.
Figura 2.10 Schema di un motore ad effetto Hall
Camera di ionizzazione anulare Magnete esterno Magnete interno Anodo Isolante Catodo
2.5 Impieghi della propulsione elettrica
L’elevato impulso specifico, caratteristico dei propulsori elettrici, ne rende vantaggioso l’impiego rispetto ai propulsori chimici convenzionali, soprattutto per le missioni più impegnative, consentendo un minor consumo di propellente e pertanto una maggior porzione di massa da destinare al carico utile; ma presentano l’inconveniente di non essere facilmente scalabili, cioè le prestazioni che si possono ottenere con ognuno di essi non sono facilmente ottenibili da altri, semplicemente variando le dimensioni e la potenza in ingresso.
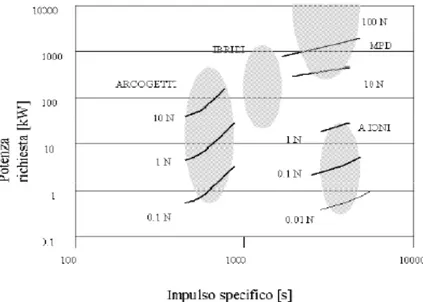
Nelle Figure 2.11 e 2.12 vengono presentate le prestazioni che si aspira raggiungere con i propulsori elettrici.
Figura 2.12 Efficienza in funzione dell’impulso specifico
Gli arcogetti e i propulsori elettrostatici, grazie alla estrema facilità di accensione e spegnimento, alla possibilità di regolare con precisione il livello di spinta e al consumo ridotto di propellente, si pongono come valida soluzione di impiego in applicazioni quali il controllo di assetto o il mantenimento di stazione di satelliti artificiali.
Gli arcogetti presentano elevati livelli di efficienza a bassi impulsi specifici (IS <1000 s) e una potenza specifica dell’ordine di 10 kW/N. I
propulsori a ioni raggiungono valori di efficienza propulsiva dell’ordine dell’80÷90% con impulsi specifici variabili tra 3000 s e 6000 s e una potenza specifica di 25÷30 kW/N. Questi elevati valori di efficienza, insieme al conseguimento di un sufficiente grado di affidabilità, hanno fatto sì che arcogetti e propulsori a ioni siano stati tra i primi ad essere impiegati in applicazioni quali il controllo di assetto o il mantenimento di stazione.
I propulsori MPD presentano valori sperimentali dell’impulso specifico compresi tra 2000 s e 5000 s, con densità di spinta superiori a 1000 N/m2, ma bassi valori di rendimento (circa il 40%) che non ne consentono un’applicazione a breve scadenza. Un altro limite del propulsore MPD è la necessità di potenze per il funzionamento in continuo dell’ordine dei kW, per i propulsori a campo magnetico applicato, e dei MW, per quelli a campo magnetico autoindotto. Queste potenze sono ottenibili da
generatori costituiti da reattori nucleari che sono però, come già accennato, di non facile realizzazione. Alla necessità di potenze così elevate si può ovviare, in sede sperimentale, con un uso dei propulsori MPD in regime pulsato quasi stazionario (PQS) sfruttando la tecnologia dei condensatori per disporre di MW di potenza per brevi durate di funzionamento (millisecondi).