Simulazione
In questo capitolo si utilizzerano i modelli proposti in 3, 4 e 5, per simulare il comportamento del motoveicolo in alcune manovre. Riassumendo quanto fatto finora, sono disponibili 3 modelli di motociclo:
• Semplificato (4.5) • Intermedio (4.7) • Complesso (4.6)
Sono disponibili 2 modelli di pneumatico: • Lineare rilassato (3.1)
• Look-up Table 2D o non lineare rilassato (3.2)
Inoltre, verrà utilizzato il controllore sviluppato in [4] e descritto nel capito-lo 5; sono quindi disponibili in totale 6 possibili combinazioni motoveicocapito-lo- motoveicolo-pneumatico.
Di volta in volta saranno analizzati i risultati, cercando di confrontare i vari modelli per giustificare le eventuali diversità nelle risposte ottenute.
Per eseguire le simulazioni delle manovre, è stato utilizzato il software Simulink°c
nella versione 5.0, ambiente del software Matlab°c
versione 6.5,
prodotto dalla MathWorks; Simulink°c
permette di ricostruire le equazioni dei modelli analitici in un ambiente di interfaccia a blocchi e, successiva-mente, di ottenere la soluzione numerica del problema differenziale introdot-to. È possibile scegliere fra diversi metodi per la risoluzione numerica delle
equazioni differenziali, sia a passo fisso che a passo variabile. Per chiarimenti si veda [16].
I dati del motoveicolo che sono stati inseriti nei modelli e quelli proveni-enti da misurazioni in pista son stati forniti da Ducati Motor Spa e non sono riportati per motivi di riservatezza.
Saranno riportati vari grafici, per illustrare gli andamenti di alcune gran-dezze di particolare interesse; si ricorda che, concordemente a quanto definito nella sezione (2.5), valori positivi dell’angolo di sterzo indicano rotazioni a si-nistra rispetto al pilota, mentre angoli di rollio positivi indicano inclinazioni a destra.
6.1
Manovre
Come è stato descritto nel capitolo 5, il controllore agisce sulla coppia
applicata al manubrio Mδ e sulla forza di trazione applicata nel punto di
contatto fra pneumatico posteriore e terreno Ft, per far seguire al motoveicolo
la traiettoria voluta alla velocità longitudinale desiderata. Potendo disporre di una buona bibliografia, nella quale fra l’altro si descrive il comportamento di un pilota nell’impostazione e nella percorrenza di alcune manovre ([4], [15], [23], [25], [26]), sono state impostate le caratteristiche del controllore a disposizione per essere in grado di simulare le seguenti situazioni:
• Raffica di vento laterale su un percorso rettilineo • Cambio di corsia
• Curva ad U
Inoltre, al fine di verificare la correttezza della trasposizione delle equazioni dei modelli nel codice di calcolo, sono state effettuate simulazioni a rollio costante. Per eseguire questo tipo di prove, è stato sviluppato un modello di pilota più semplice rispetto a quello descritto in (5), che invece è stato utilizzato per tutto lo sviluppo del lavoro successivo. Questa versione di pilota si basa su una legge di controllo della coppia di sterzo del tipo:
Rispetto alla versione completa, questa legge di controllo presenta le seguenti semplificazioni:
• I valori K0, K1 e K2 sono costanti
• Non è presente nessun tipo di previsione sull’angolo di rollio • Non è presente il controllo sull’errore di posizione
• Non è presente il controllo sull’errore di traiettoria
• Non è presente nessun tipo di previsione sugli errori di posizione e traiettoria
• Il valore dell’angolo di rollio desiderato Φr è costante e fornito come
input
Nonostante il grado di semplificazione risulti notevole, se si escludono i tran-sitori, questo tipo di controllore ha fornito risultati interessanti e corretti (a regime), con un significativo risparmio per quanto concerne i tempi di calcolo. Con queste prove è stato posibile monitorare i valori a regime di grandezze importanti, quali gli angoli di deriva e le coordinate lagrangiane, con le loro derivate temporali.
6.1.1
Rettilineo
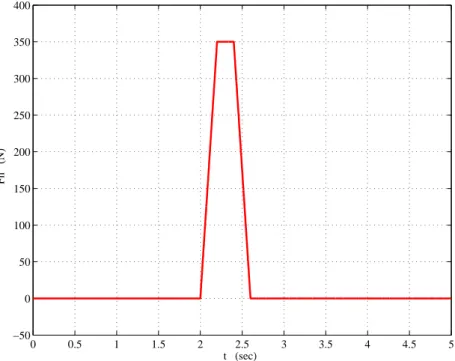
In questo caso, il motoveicolo deve seguire una traiettoria rettilinea ed è disturbato da un’azione laterale Fn diretta come jN, applicata nel punto D
(Fig. 4.3), in maniera da riprodurre una raffica di vento laterale che investe improvvisamente il motociclo; in Fig. 6.1 è mostrato l’andamento temporale di tale disturbo; si è optato per un profilo pù dolce, ripetto a quello rettan-golare. Infatti, forti discontinuità causano notevoli riduzioni del time-step (passo di integrazione) con metodi di integrazione a passo variabile, quali quelli che si sono utilizzati.
Il controllore è impostato per percorrere la manovra ad una velocità longitu-dinale uN = 15 m/s.
Nelle Fig. 6.3, 6.4 e 6.5 si possono vedere gli andamenti temporali di alcune grandezze caratteristiche durante la percorrenza della manovra.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 −50 0 50 100 150 200 250 300 350 400 t (sec) Fn (N)
Figura 6.1: Disturbo laterale
−20 0 20 40 60 80 100 120 140 160 180 200 −5 −4 −3 −2 −1 0 1 2 3 4 5 x (m) y (m) rettilineo traiett. percorsa
0 5 10 15 −0.5 0 0.5 1 1.5 2 t (sec) φ (°)
Figura 6.3: Angolo di rollio nel rettilineo
0 5 10 15 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1 t (sec) δ (°)
0 5 10 15 −2 −1 0 1 2 3 4 5 6 7 8 t (sec) Coppia (Nm)
6.1.2
Cambio di corsia
In questa situazione il motoveicolo deve eseguire il passaggio fra due tratti di percorso rettilinei distanti 1.5 m. Nella Fig. 6.6 sono mostrati il tracciato di riferimento e quello effettivamente percorso. Si è volutamente optato per non far recuperare troppo repentinamente la traiettoria voluta al veicolo dopo la manovra, in modo tale da rappresentare un comportamento abbastanza comune in questo tipo di manovre. Per lo stesso motivo, è stata scelta una legge di controllo che tende a ”tagliare” la seconda curva. Il controllore è
impostato per percorrere la manovra ad una velocità longitudinale uN =
10 m/s.
Nelle Fig. 6.7, 6.8 e 6.9 si possono vedere gli andamenti temporali di alcune grandezze caratteristiche durante la percorrenza della manovra.
0 10 20 30 40 50 60 70 80 −1 −0.5 0 0.5 1 1.5 2 2.5 3 x (m) y (m) pista traiett. percorsa
0 2 4 6 8 10 12 −10 −5 0 5 t (sec) φ (°)
Figura 6.7: Angolo di rollio nel cambio di corsia
0 2 4 6 8 10 12 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5 3 t (sec) δ (°)
0 2 4 6 8 10 12 −25 −20 −15 −10 −5 0 5 10 15 t (sec) Coppia (Nm)
6.1.3
Il Correntaio
In questo caso si vuole che il controllore sia in grado di guidare il motovei-colo nell’impostazione, la percorrenza e l’uscita di una curva ad U. Questo tipo di manovra merita una particolare attenzione, poiché è usuale trovare pubblicazioni (ad es. [15]), nelle quali è presa come riferimento, per la valu-tazione delle caratteristiche di manovrabilità e maneggevolezza.
Inoltre, potendo disporre di dati forniti dalla Ducati Motor Spa, ricavati su un veicolo opportunamente strumentato durante la percorrenza di una curva non molto dissimile da una ad U, questo genere di manovra è stata presa come riferimento per tutte le considerazioni a seguire.
Si è scelto di riprodurre una traiettoria simile a quella della curva detta Cor-rentaio (Fig. 6.11), situata nel circuito del Mugello (Fig. 6.1.3) in Italia.
Figura 6.10: Circuito del Mugello
Viste le caratteristiche del controllore a disposizione, che accetta traiettorie bidimensionali, non è stato possibile riprodurre il profilo altimetrico di questa porzione di tracciato.
Dai dati sperimentali a disposizione1
si può ricavere, fra l’altro, la posizione
1
Figura 6.11: Curva del Correntaio
del motoveicolo rispetto ad un sistema di riferimento di assi suolo. Si è scelto di assegnare al controllore una linea da seguire simile al profilo interno della curva.
Inoltre, i dati sperimentali a disposizione sono stati rilevati in una prova a velocità variabile; osservando l’andamento temporale della velocità longitu-dinale ed incrociandolo con quello della posizione assoluta, si distinguono nettamente tre fasi:
• Staccata: questa fase inizia quando il pilota agisce sui freni per iniziare a decelerare
• Percorrenza: in questa fase si può rilevare una velocità pressoché costante; è di breve durata ed è quella più vicina alle condizioni stazionarie2
.
• Uscita: in questa fase il pilota agisce per aumentare la velocità e
ritornare ad un valore nullo dell’angolo di rollio.
Queste tre fasi non sono potute essere riprodotte, viste le caratteristiche del pilota a disposizione, che è adatto soprattutto alla simulazione di manovre a velocità longitudinale pressoch[ costante.
Nella Fig. 6.12 sono mostrati il tracciato di riferimento e quello effettiva-mente percorso, in una delle simulazioni effettuate; si è scelto di far percorrere la curva in maniera più dolce possibile, con un comportamento dissimile da quello tipico delle manovre sportive (ingresso largo, presa di corda, uscita larga), poiché questo tipo di taratura del controllore si adatta bene a tutti
2
i modelli (favorendo l’opera di confronto, importante ai fini del presente la-voro). Tuttavia, sono state eseguite simulazioni nelle quali è stato riprodotto anche il comportamento sportivo (vd. Fig. 6.16). Nelle Fig. 6.13, 6.14 e 6.15 si possono vedere gli andamenti temporali di alcune grandezze durante la percorrenza della manovra, nella stessa simulazione. Anche in questo caso è possibile notare la tipica sterzata in opposizione nella fase di impostazione della manovra. −40 −20 0 20 40 60 80 −100 −90 −80 −70 −60 −50 −40 −30 −20 −10 0 10 x (m) y (m) pista traiett. percorsa
0 2 4 6 8 10 12 14 16 18 −5 0 5 10 15 20 25 30 35 t (sec) φ (°)
Figura 6.13: Angolo di rollio
0 2 4 6 8 10 12 14 16 18 −2.5 −2 −1.5 −1 −0.5 0 0.5 t (sec) δ (°)
0 2 4 6 8 10 12 14 16 18 −10 0 10 20 30 40 50 60 70 t (sec) Coppia (Nm)
Figura 6.15: Coppia applicata al manubrio
−40 −20 0 20 40 60 80 −100 −80 −60 −40 −20 0 20 x (m) y (m) pista traiett. percorsa
6.2
Modello semplificato
In questa sezione verranno descritti i risultati ottenuti implementando il modello di motoveicolo Semplificato (4.5), con entrambi i modelli di pneu-matico. Per gli schemi Simulink del motoveicolo si veda App. B, per i modelli di pneumatico si veda App. D e App. E. La manovra di riferimento è quella descritta in (6.1.3). Inoltre, verrà messa in evidenza l’importanza degli effetti giroscopici, generati dalla rotazione delle ruote. Per considerazioni sui valori della coppia di sterzo, si rimanda alla sezione 6.3.
6.2.1
Influenza del modello di pneumatico
Un primo confronto, ottenibile anche con un modello di motoveicolo semplificato, può essere fatto sulle diverse schematizzazioni per i pneumatici. In Fig. 6.17 ed in Fig. 6.18 sono messe a confronto le forze laterali ottenute con i due tipi di pneumatico. Nelle Fig. 6.19 e 6.20 sono messi a confronto l’angolo e la coppia di sterzo nei due casi. Risulta interessante notare come sia necessaria una coppia di sterzo minore con il pneumatico di tipo non lineare, per ottenere sostanzialmente lo stesso andamento delle forze.
0 2 4 6 8 10 12 14 16 18 −800 −700 −600 −500 −400 −300 −200 −100 0 100 t (sec) Fy1 (N) lineare look−up
0 2 4 6 8 10 12 14 16 18 −1000 −800 −600 −400 −200 0 200 t (sec) Fy2 (N) lineare look−up
Figura 6.18: Forza laterale pneumatico posteriore
0 2 4 6 8 10 12 14 16 18 −2.5 −2 −1.5 −1 −0.5 0 0.5 t (sec) δ (°) lineare look−up
0 2 4 6 8 10 12 14 16 18 −4 −2 0 2 4 6 8 10 t (sec) Coppia (Nm) lineare look−up
6.2.2
Influenza della presenza delle ruote
In questa sezione si vuole mettere in evidenza l’influenza che gli effetti giroscopici, dovuti alla rotazione delle ruote attorno al proprio asse, ha sulla dinamica del modello di motociclo in questione. Per far questo, si confrontano i risultati di due simulazioni, della quali la prima ha i momenti d’inerzia I1 = I2 = 0, la seconda ha i valori riportati in app. A. L’effetto giroscopico
0 2 4 6 8 10 12 14 16 18 −2 0 2 4 6 8 10 t (sec) Coppia (Nm) ruote non ruote
Figura 6.21: Coppia di sterzo
si manifesta quando un organo ruota attorno ad un asse x, che a sua volta ruota attorno ad un altro asse y, sghembo rispetto al primo. Esso è pari al prodotto vettoriale fra il momento della quantità di moto rispetto all’asse x e la velocità di rotazione rispetto all’asse y. Si può asserire (approssimando la situazione reale) che l’asse di rotazione della ruota ruoti con contributi dovuti a:
• Il moto di imbardata • Il moto di rollio • Il moto di sterzata
Con riferimento alla sezione (2.5), il momento giroscopico, dovuto al moto di imbardata attorno all’asse z0 ed alla rotazione della ruota attorno all’asse
y2, è per definizione di prodotto vettoriale, ortogonale ad entrambi. Nelle
normali condizioni di utilizzo, la componente di tale effetto rispetto all’asse
xN è di segno positivo. Il momento giroscopico, dovuto al moto di rollio
attorno all’asse xN ed alla rotazione della ruota attorno all’asse y2, può essere
schematizzato con due effetti:
• Momento rispetto all’asse di sterzo zδ
• Momento rispetto all’asse di imbardata z0
Il momento giroscopico , dovuto al moto di sterzata attorno all’asse zδ ed
alla rotazione della ruota attorno all’asse y2, produce effetti simili a quelli
del moto di imbardata, soprattuto per piccoli angoli di rollio.
Nella fase di impostazione della curva si nota un valor massimo dell’angolo di sterzo (Fig. 6.22) minore nel caso in cui si includano i momenti d’inerzia delle ruote, a fronte di andamenti della coppia di sterzo (Fig. 6.21) e dell’angolo di rollio (Fig. 6.23) pressoché identici. Questo denota un aumento della facilità nel impostare le curve, dovuta agli effetti giroscopici generati dalle ruote, che va a scapito di azioni del pilota che devono essere più energiche e repentine.
0 2 4 6 8 10 12 14 16 18 −2.5 −2 −1.5 −1 −0.5 0 0.5 t (sec) δ (°) ruote non ruote
Figura 6.22: Angolo di sterzo
0 2 4 6 8 10 12 14 16 18 −5 0 5 10 15 20 25 30 t (sec) φ (°) non ruote ruote
6.3
Modello intermedio
In questa sezione verranno descritti i risultati ottenuti implementando il modello di motoveicolo Intermedio (4.7), con entrambi i modelli di pneumati-co. La manovra di riferimento è quella descritta in (6.1.3).
Risulta opportuno mettere in evidenza l’impossibilità di utilizzare un con-trollore tarato per il modello Semplificato (4.5), per eseguire simulazioni con i modelli Intermedio (4.7) e Complesso (4.6); in questi ultimi due, una model-lazione più realistica della cinematica anteriore ha portato a considerare avan-corsa e avanzamento (2.6). Così facendo, la forza laterale che agisce nel punto di contatto a terra del pneumatico anteriore (F1) interviene nell’equilibrio a
momento attorno all’asse di sterzo. In funzione della geometria dell’avantreno
0 2 4 6 8 10 12 14 16 18 −10 0 10 20 30 40 50 60 70 t (sec) Coppia (Nm) semplificato intermedio
Figura 6.24: Confronto coppia di sterzo questo contributo può essere stabilizzante o destabilizzante3
; comunque, in entrambi i casi, poiché il pilota virtuale non possiede le capacità di sensibi-lità ed adattabisensibi-lità di uno reale, risulta impossibile utilizzarne uno solo per situazioni così diverse. In Fig. 6.24 si può notare il diverso comportamento
3
L’uso di questi due termini è improprio; sarebbe più corretto parlare di momento favorevole o sfavorevole alla sterzata.
in termini di coppia di sterzo, che il pilota assume nel percorrere la stessa manovra, con i due modelli di motoveicolo. Risulta opportuno mettere in luce che i risultati in termini di coppia di sterzo, ottenuti con il modello in-termedio, sono più vicini a quelli ricavabili in prove sperimentali.
Deve essere messo in evidenza, che con i modelli Intermedio e Complesso si ottengono valori della coppia di sterzo più alti di quelli rilevati sul veicolo strumentato. Ciò deve essere essenzialmente attribuito all’avere considera-to il busconsidera-to del pilota solidale al veicolo; infatti, nella realtà il conducente si muove rispetto alla moto ed il compito di curvare non è delegato interamente all’azione sterzante.
6.3.1
Influenza del modello di pneumatico
Analogamente a quanto fatto in (6.2.1), si vuole mettere in evidenza la differente risposta che il medesimo modello di motoveicolo fornisce se assem-blato con diversi modelli di pneumatico. In Fig. 6.25 ed in Fig. 6.26 sono messe a confronto le forze laterali ottenute con i due tipi di pneumatico. Nelle Fig. 6.27 e 6.28 sono messi a confronto l’angolo e la coppia di sterzo nei due casi. 0 2 4 6 8 10 12 14 16 18 −900 −800 −700 −600 −500 −400 −300 −200 −100 0 100 t (sec) Fy1 (N) lineare look−up
0 2 4 6 8 10 12 14 16 18 −1200 −1000 −800 −600 −400 −200 0 200 t (sec) Fy2 (N) lineare look−up
Figura 6.26: Forza laterale pneumatico posteriore
Anche con questo modello di motoveicolo viene confermata la tendenza ad una minore coppia di sterzo esercitata dal pilota, per percorrere la stessa traiettoria, con il pneumatico di tipo non lineare. Come è già stato fatto notare, fra i due modelli Semplificato e Intermedio si può parlare solo di stes-sa tendenza per quanto concerne la coppia di sterzo, poiché le ipotesi che li reggono portano a valori molto diversi.
0 2 4 6 8 10 12 14 16 18 −2.5 −2 −1.5 −1 −0.5 0 0.5 t (sec) δ (°) lineare look−up
Figura 6.27: Angolo di sterzo
0 2 4 6 8 10 12 14 16 18 −10 0 10 20 30 40 50 60 70 t (sec) Coppia (Nm) lineare look−up
6.3.2
Influenza della presenza del motore
In questa sezione si vuole mettere in evidenza l’effetto che la presenza di organi rotanti nel motore ha sulla dinamica del motoveicolo. La schematiz-zazione di queste parti in movimento dovute al propulsore è stata descritta in dettaglio in (2.8.3); si ricorda che il motore è stato schematizzato come un’albero rotante attorno all’asse yE, di versore jG, con momento di inerzia
pari al momento di inerzia ridotto a tale asse delle principali parti rotanti (al-bero motore, cambio, imbiellaggi, . . . ). La configurazione proposta, dovuta al tipo mezzo analizzato, è quella a motore trasversale. Gli effetti giroscopici del propulsore così schematizzato sono simili a quelli descritti per le ruote in (6.2.2); anche in questo caso i tre effetti principali sono dovuti:
• al moto di rollio • al moto di imbardata • al moto di sterzata
Nelle Fig. 6.29, 6.30 e 6.31 sono riportati i risultati delle simulazioni con e senza la presenza del motore, rispettivamente per la coppia di sterzo e gli angoli di sterzo e rollio. Avendo supposto che l’albero ruoti concordemente al versore jG, si generano effetti giroscopici durante l’ingresso in curva che
facilitano4
la manovra. Questa maggior propensione a curvare si traduce il un aumento della coppia di sterzo e dell’angolo di rollio massimi ed in una diminuzione dell’angolo di sterzo necessario per compiere la stessa manovra.
4
Con facilitare la manovra si intende un minor angolo di sterzo necessario per inserire il veicolo in curva.
0 2 4 6 8 10 12 14 16 18 −10 0 10 20 30 40 50 60 70 t (sec) Coppia (Nm) motore non motore
Figura 6.29: Coppia di sterzo
0 2 4 6 8 10 12 14 16 18 −2.5 −2 −1.5 −1 −0.5 0 0.5 t (sec) δ (°) motore non motore
0 2 4 6 8 10 12 14 16 18 −5 0 5 10 15 20 25 30 35 t (sec) φ (°) motore non motore
6.4
Modello complesso
In questa sezione verranno descritti i risultati ottenuti implementando il modello di motoveicolo Complesso (4.6), con il modello di pneumatico non lineare (3.2). La manovra di riferimento è quella descritta in (6.1.3). Per gli schemi a blocchi Simulink del modello di motoveicolo si veda App. C.
Nelle Fig. 6.32, 6.33 e 6.34, sono messi a confronto rispettivamente la cop-pia e l’angolo di sterzo e l’angolo di rollio nella prima fase della manovra, ot-tenuti dal modello Intermedio e da quello Complesso. Si noti come le sempli-ficazioni5
del primo rispetto al secondo forniscano risultati molto diversi, soprattutto per quanto concerne la coppia di sterzo.
0 1 2 3 4 5 6 7 8 9 10 −10 0 10 20 30 40 50 60 70 80 t (sec) Coppia (Nm) intermedio complesso
Figura 6.32: Coppia di sterzo
5
Angoli di deriva e componenti lagrangiane delle forze attive non conservative; si veda la sezione 4.7.
0 1 2 3 4 5 6 7 8 9 10 −2 −1.5 −1 −0.5 0 0.5 t (sec) δ (°) intermedio complesso
Figura 6.33: Angolo di sterzo
0 1 2 3 4 5 6 7 8 9 10 −5 0 5 10 15 20 25 30 35 t (sec) φ (°) intermedio complesso