- 20 -
Il modello aeroelastico
2.1 Introduzione
A causa della deformabilità del velivolo, l’interazione tra le forze aerodinamiche, elastiche ed eventualmente inerziali agenti sulla struttura può dar vita a una serie di fenomeni comunemente noti come aeroelastici.
Il verificarsi in volo di instabilità dovute all’interazione di forze aerodinamiche, strutturali e inerziali oltre a modificare le caratteristiche aerodinamiche del velivolo può spesso risultare in eventi catastrofici. Non deve pertanto stupire la crescente attenzione posta nell’analisi di questi problemi già durante le fasi iniziali di progettazione. Gli strumenti utilizzati in passato per la trattazione di tali fenomeni erano sostanzialmente di tipo analitico o sperimentale ma, mentre gli strumenti analitici sono in grado al massimo di catturare gli andamenti generali del problema, i test sperimentali, condotti prevalentemente in galleria del vento, risultano essere economicamente dispendiosi. Lo sviluppo tecnologico rappresentato dall’avvento di computer ad alta velocità computazionale ha però reso possibile l’introduzione di più efficienti strumenti di analisi incentivando la crescita di una nuova branca della meccanica delle strutture nota come Aeroelasticità Computazionale (CA).
Storicamente i fenomeni in cui l’aerodinamica interagisce con la sola flessibilità della struttura sono detti statici mentre, nel caso in cui anche l’inerzia del velivolo produca effetti significativi, si parla di fenomeni aeroelastici dinamici. L’interazione tra le sole
Nella prima parte di questo capitolo illustreremo la derivazione dell’equazione aeroelastica in assenza di non linearità nel sottosistema strutturale. Descriveremo inoltre il processo di discretizzazione del sistema e di riduzione dei gradi di libertà del problema mediante i metodi di condensazione strutturale e strutturale su base modale. Nella seconda parte del capitolo infine discuteremo l’integrazione del freeplay nel modello precedentemente descritto.
- 21 -
forze aerodinamiche e inerziali, e tra le sole forze inerziali ed elastiche, dà invece luogo rispettivamente a problemi di dinamica del volo e di dinamica strutturale (fig. 2.1).
In genere il manifestarsi di deformazioni statiche nella struttura di un velivolo non comporta grossi problemi in quanto le forze elastiche di richiamo della struttura e i carichi aerodinamici si equilibrano tra loro, ma, per certi valori della pressione dinamica asintotica del flusso, le forze aerodinamiche possono superare quelle elastiche portando a un collasso della struttura noto come divergenza.
Le instabilità aeroelastiche di tipo dinamico sono più frequenti rispetto a quelle statiche e sono associate a un processo di retroazione tra il flusso e la struttura che si traduce nella comparsa di oscillazioni autoeccitate. L’instabilità aeroelastica probabilmente più nota e più studiata è rappresentata dal flutter flesso-torsionale d’ala caratterizzato da un accoppiamento dei modi flessionale e torsionale dell’ala governato dall’aerodinamica instazionaria che scambia energia con la struttura alimentandone la deformazione. FORZE AERODINAMICHE FORZE ELASTICHE FORZE INERZIALI Aeroelasticità Statica Meccanica del Volo Aeroelasticità Dinamica Elastomeccanica
- 22 -
Anche il buzz appartiene alla classe dei fenomeni di instabilità aeroelastica dinamici e, come visto nel precedente capitolo, risulta dominato dalla natura non lineare dell’aerodinamica in campo transonico.
Da quanto detto sinora è evidente come un sistema aeroelastico sia composto da due sottosistemi, quello strutturale e quello aerodinamico, accoppiati tra loro. Ai fini di una risoluzione numerica del problema tramite le tecniche dell’Aeroelasticità Computazionale si dovranno quindi definire:
Un modello strutturale in grado di descrivere il comportamento dinamico del velivolo;
Un modello aerodinamico atto a catturare tutti i fenomeni associati alle condizioni di volo esaminate;
Una metodologia di accoppiamento tra i due sottosistemi strutturale e aerodinamico che risulti il più possibile robusta ed efficiente.
Le definizioni tanto del modello aerodinamico quanto della metodologia di accoppiamento verranno discusse nei capitoli successivi mentre, qui di seguito, ci concentreremo nella descrizione del modello strutturale. In particolare, nella derivazione dell’equazione aeroelastica illustrata nel prossimo paragrafo, ometteremo di esplicitare il termine corrispondente alle forzanti aerodinamiche, equiparando il comportamento del velivolo a quello di un sistema dinamico soggetto a generiche forzanti esterne. L’introduzione nel modello della non linearità strutturale di tipo freeplay sarà infine discussa nell’ultimo paragrafo del capitolo.
2.2 L’equazione aeroelastica
I due sottosistemi strutturale e aerodinamico sono caratterizzati da modelli tra loro molto diversi sia dal punto di vista dinamico sia da quello topologico. La complessità dei fenomeni, unitamente alla necessità di porre i due sottosistemi in mutua comunicazione, richiede quindi l’utilizzo di opportune equazioni alle derivate parziali o di principi variazionali per la descrizione del problema. La risoluzione
- 23 -
dell’equazione aeroelastica per via numerica impone inoltre di operare con modelli opportunamente discretizzati.
Di seguito ricaveremo l’equazione aeroelastica discreta a partire da un principio variazionale noto come Principio dei Lavori Virtuali [14][15] e illustreremo la metodologia in base alla quale si è effettuata la condensazione del modello strutturale del velivolo studiato.
2.2.1 Il Principio dei Lavori Virtuali
L’enunciato del Principio dei Lavori Virtuali asserisce che, per ogni campo di spostamenti virtuali arbitrario, infinitesimo e congruente, il lavoro virtuale compiuto dal corrispondente sistema di forze reali debba essere nullo o, equivalentemente, che il lavoro virtuale di deformazione compiuto dalle forze interne debba essere eguagliato da quello delle forze esterne:
(2.1) dove il simbolo sta ad indicare una variazione virtuale.
Il lavoro delle forze interne di deformazione sull’intero volume del corpo in esame può essere scritto, adottando una notazione matriciale, come:
(2.2) dove si sono indicate con le componenti del tensore di deformazione e con quelle del tensore degli sforzi.
Data la natura intrinsecamente dinamica dei fenomeni aeroelastici il vettore spostamento di un generico punto del corpo sarà non solo funzione della posizione del punto stesso ma anche del tempo. Inoltre le accelerazioni e/o velocità cui è soggetta la struttura possono portare localmente all’insorgere di forze di natura viscosa ovvero smorzanti. Assumiamo quindi, per il legame tra gli stati di sforzo e di deformazione, una legge costitutiva visco - elastica lineare del tipo:
- 24 -
(2.3) che si discosta dal caso statico per il solo termine rappresentato dalla derivata temporale del vettore smorzamento. L’introduzione di questo termine serve a modellare, dal punto di vista energetico, il meccanismo di smorzamento strutturale presente nel sistema a causa di giunzioni e/o cicli di isteresi tra le fasi di carico e scarico del materiale.
Introducendo l’operatore differenziale che, in coordinate cartesiane e per il caso tridimensionale, può essere scritto come:
(2.4)
possiamo esprimere la relazione tra deformazioni e spostamenti dei punti della struttura:
(2.5) Sostituendo le relazioni (2.3) e (2.5) nell’equazione (2.2) otteniamo quindi, per il lavoro virtuale delle forze interne, l’espressione:
(2.6)
Per quanto riguarda invece le forze esterne queste possono essere generalmente distinte in forze di superficie e di volume . Nell’ambito dei problemi aeroelastici le forze di superficie sono in genere rappresentate dalle forze aerodinamiche agenti sulla superficie del velivolo e quelle di volume dalle forze di inerzia. Il lavoro virtuale esterno è quindi esprimibile tramite la relazione:
- 25 -
In conclusione il Principio dei Lavori Virtuali può essere riscritto sostituendo nell’equazione (2.1) le espressioni dei lavori virtuali delle forze esterne e delle forze di deformazione ricavate rispettivamente nelle relazioni (2.7) e (2.6):
(2.8)
2.2.2 Discretizzazione del problema
Data la difficoltà di risolvere per via analitica la relazione (2.8) diviene necessario procedere ad una discretizzazione del modello strutturale. In ambito industriale è consuetudine generare un modello discreto molto raffinato che però, come vedremo nel prossimo sottoparagrafo, viene di fatto utilizzato solo per le analisi di stress.
Il processo di discretizzazione consiste nella suddivisione della struttura in un sistema equivalente di elementi di dimensioni più piccole e forma relativamente semplice. Questi elementi “base” possono essere mono-, bi- e tridimensionali e si differenziano tra loro a seconda dei tipi di sollecitazione che sono in grado sopportare.
L’approccio alla discretizzazione dell’equazione (2.8) si basa su una procedura di approssimazione degli spostamenti dei punti della struttura nota come Metodo di Ritz [16]. Tale metodo consiste nell’approssimare gli spostamenti fisici con una combinazione lineare di spostamenti nodali ottenuta tramite l’utilizzo di opportune funzioni di forma che, prese singolarmente, rispettino le condizioni al contorno geometriche del problema. La discretizzazione della struttura, unitamente all’introduzione delle funzioni di forma ci permette quindi di operare per le funzioni di spostamento una vera e propria separazione delle variabili:
Il Principio dei Lavori Virtuali può quindi essere riscritto come:
- 26 - dove si è posto:
isolando poi, dal termine relativo alle forze esterne di volume, le forze di inerzia:
e definendo:
si ottiene il Principio dei Lavori Virtuali in forma discreta:
che, per l’arbitrarietà degli spostamenti virtuali, diventa:
La (2.11) rappresenta quindi la forma discreta dell’equazione della dinamica strutturale. Il vantaggio di tale rappresentazione rispetto al caso in cui si consideri il corpo come un continuum risiede nella riduzione dei gradi di libertà del problema che passano da essere infiniti ad un numero, se pur grande, sempre limitato rendendo così percorribile la strada della soluzione numerica del problema.
- 27 -
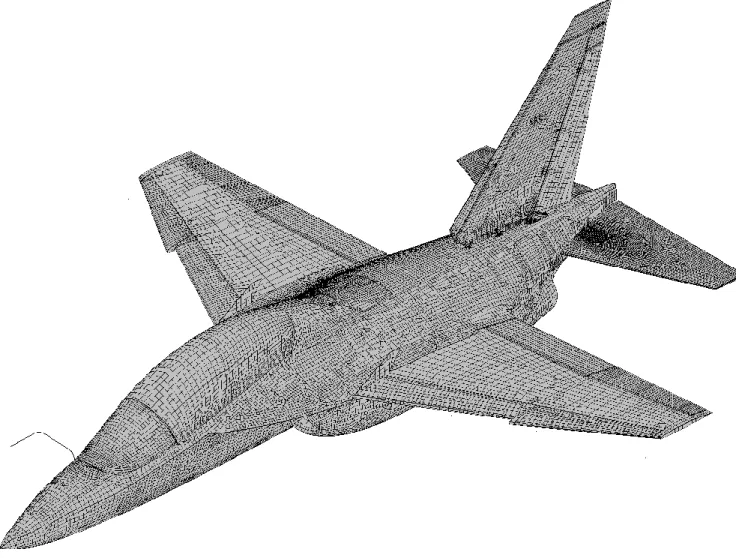
Fig. 2.2 Modello discreto per l’analisi di stress del velivolo M-346.
2.2.3 Condensazione strutturale
I modelli discreti come quello rappresentato in figura (2.2) sono generalmente molto dettagliati in quanto le analisi di stress richiedono una buona precisione nell’identificazione delle azioni che agiscono localmente sulla struttura e, di conseguenza, un elevato numero di gradi di libertà. Ai fini delle analisi dinamiche, e in particolare di quelle aeroelastiche, questo enorme numero di gradi di libertà risulta essere troppo oneroso dal punto di vista computazionale ed eccessivamente dettagliato
- 28 -
per un’adeguata descrizione del problema. Una buona approssimazione della dinamica strutturale richiede fortunatamente una descrizione del comportamento globale della struttura che può efficientemente essere raggiunta mediante l’utilizzo di un limitato numero di gradi di libertà.
Il modello ridotto o condensato può essere ottenuto per mezzo di metodi di riduzione applicati singolarmente ad ogni componente del velivolo (cassone alare, fusoliera, piloni etc.) unendo poi tra di loro le griglie semplificate così ricavate. Ogni componente viene rappresentato mediante matrici di massa e rigidezza definite nella nuova mesh. I dettagli strutturali vengono così rimossi mentre le rigidezze di connessione tra i componenti principali e le caratteristiche di inerzia dei grossi elementi non strutturali appaiono esplicitamente nel modello condensato.
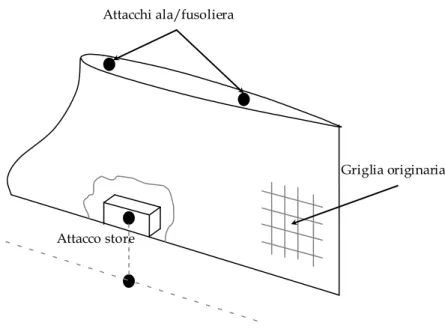
Il criterio fondamentale per ottenere un buon modello di riduzione è di garantire una rappresentazione realistica dei modi ortogonali della struttura all’interno di un opportuna banda di frequenza. La soglia di frequenza fino alla quale questa rappresentazione deve dimostrarsi adeguata può essere fissata una volta valutati i principali modi strutturali in accordo con l’accuratezza attesa dalle GRT (Ground Resonance Test). La scelta dei modi più significativi deve a sua volta tener conto, oltre che della forma degli elementi strutturali che si vogliono schematizzare, anche della presenza di vincoli strutturali e carichi concentrati mentre è buona regola collocare i nodi in modo da trascurare i modi di deformazione locale che sono in genere presenti in gran numero se si considera la griglia di partenza. A titolo di esempio il numero minimo di nodi necessari per schematizzare correttamente, dal punto di vista dinamico, il pilone di un velivolo è 3: 2 nodi devono essere posti in corrispondenza dei punti di attacco del pilone con il resto del velivolo e 1 nodo in corrispondenza dell’attacco dello store.
In generale, partendo da una griglia con nodi, il problema della condensazione si riduce alla definizione di una matrice di trasformazione di dimensione con
tale che:
I metodi di condensazione differiscono l’un l’altro dal modo in cui si definisce la matrice [16].
- 29 -
Dovendosi l’energia elastica conservare nel passaggio dal modello completo a quello ridotto avremo:
ovvero:
e, analogamente, per la conservazione dell’energia cinetica:
In generale gli nodi del sistema completo possono essere divisi in 2 gruppi: i nodi padroni, indicati con pedice (master), che verranno preservati nel sistema ridotto, e i nodi schiavi, indicati con pedice (slave), che verranno invece eliminati. Possiamo quindi scrivere il problema della risposta in frequenza come:
Attacchi ala/fusoliera
Attacco store
Griglia originaria
- 30 -
dove rappresenta il carico esterno che si suppone applicato ai soli gradi di libertà padroni e il simbolo “ ” indica che si sta operando nel dominio delle frequenze.
La procedura di riduzione adoperata per ricavare il sistema strutturale discreto usato in questo lavoro è il Metodo di condensazione statica di Guyan-Irons. Questo consiste nel suddividere in una componente statica e una dinamica:
Per si ottiene dalla (2.16):
mentre per , sostituendo la (2.17) nella (2.16), si ricava:
La condensazione statica consiste quindi essenzialmente nell’assumere . Questo è accettabile se nella banda di frequenza di interesse del problema è praticamente uguale a zero. In altre parole questa ipotesi implica che la dinamica dei gradi di libertà schiavi abbia una frequenza maggiore di quella della banda di interesse. Si può così scrivere:
e di conseguenza:
dove è la matrice di trasformazione di Guyan-Irons da cui si possono ricavare le corrispondenti matrici di rigidezza e di massa tramite le relazioni (2.14) e (2.15).
Il risultato della condensazione strutturale per il velivolo M-346 è riportato nella figura seguente.
- 31 -
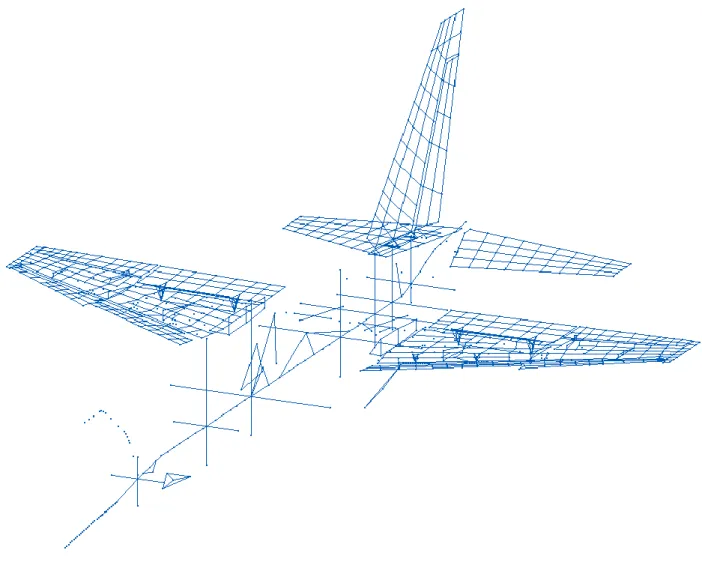
Fig. 2.4 Modello strutturale per l’analisi dinamica del velivolo M-346.
2.2.4 Condensazione su base modale
Il passaggio da una mesh come quella illustrata in figura (2.2) ad un modello “a bastoncini” come quello di figura (2.4) permette di ridurre drasticamente i gradi di libertà del problema, tuttavia anche così la risoluzione dell’equazione (2.11) richiede la soluzione, ad ogni passo temporale, di un sistema lineare di ingenti dimensioni. In questo paragrafo vedremo come, per problemi come quello trattato nel presente lavoro, risulti conveniente descrivere la dinamica della struttura in funzione di una base modale opportunamente selezionata.
- 32 -
Per una struttura lineare infatti si possono calcolare le deformazioni tramite una somma di modi propri. Le forme modali sono ricavate calcolando le oscillazioni libere non smorzate relative all’equazione (2.11):
Assumendo che il moto della struttura sia di tipo sinusoidale e che ad ogni modo di vibrare corrisponda un’unica frequenza, ci si riconduce a un classico problema di ricerca degli autovalori e dei rispettivi autovettori. Le frequenze proprie sono infatti ricavabili dalla risoluzione dell’equazione:
le cui soluzioni possono essere sostituite nella (2.22) per trovare le rispettive forme modali.
Si può quindi definire una matrice di trasformazione che leghi il vettore degli spostamenti incogniti dei nodi strutturali con il vettore delle ampiezze modali :
dove le colonne della matrice , detta matrice modale, sono costituite dagli autovettori del problema agli autovalori (2.22). Applicando tale trasformazione alla generica equazione di moto forzato del sistema, espressa tramite il Principio dei Lavori Virtuali discretizzato, e premoltiplicando per la trasposta della matrice modale si può quindi scrivere:
dove si sono ridefinite le matrici di massa, smorzamento e rigidezza come:
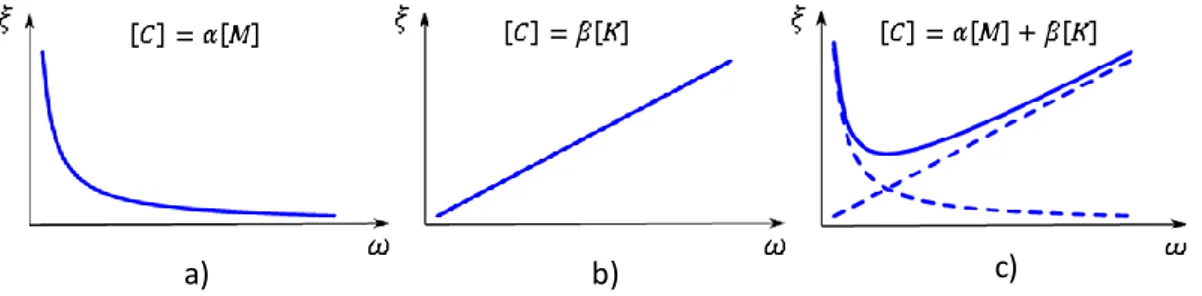
Le matrici e così ottenute risultano sempre diagonali, per quanto riguarda invece la matrice questa è diagonale solo se si assume uno smorzamento proporzionale ovvero se si verifica una delle due condizioni:
- 33 - o, più in generale, se:
In quest’ultimo caso si parla di smorzamento alla Rayleigh.
Se le matrici di massa, smorzamento e rigidezza sono diagonali si ha un disaccoppiamento delle equazioni del moto e, per ogni modo, si può scrivere:
che, nel dominio delle frequenze, permette di scrivere:
con:
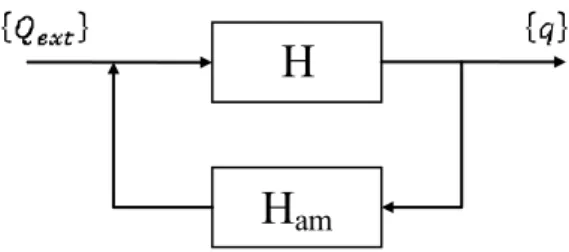
In un sistema aeroelastico è in generale composto oltre che da una generica forzante esterna anche da una forzante aerodinamica . Quest’ultima funge da blocco di retroazione per il sistema (fig. 2.6) in quanto la deformazione della struttura si traduce in una variazione delle condizioni al contorno per il sottosistema aerodinamico.
a) b) c)
Fig. 2.5 Rapporto di smorzamento: a) smorzamento proporzionale alla matrice di massa; b) smorzamento proporzionale alla matrice di rigidezza; c) smorzamento alla Rayleigh.
- 34 -
Di conseguenza le equazioni (2.25) non risultano più disaccoppiate ma questo non impedisce di approssimare il moto della struttura con una combinazione lineare di modi propri. Ciò che importa infatti è di ottenere un’approssimazione quantitativamente accettabile della legge di moto ovvero, sebbene dal punto di vista qualitativo con l’introduzione dell’aerodinamica la risposta non sia più una combinazione lineare dei modi propri, dal punto di vista prettamente quantitativo l’approssimazione risulta comunquesia soddisfacente.
L’importanza di una descrizione su base modale del problema risiede nel fatto che il contributo di ogni modo dipende dal rapporto tra il contenuto in frequenza della forzante e la frequenza propria del modo stesso. I contributi di alta frequenza infatti non influiscono in genere sulla corretta descrizione della dinamica del problema e possono quindi essere filtrati dalla base modale. Il risultato è che il comportamento della struttura può essere correttamente descritto tramite una base modale condensata corrispondente a un numero limitato di modi appartenenti alla banda di frequenze più bassa. Dal punto di vista dei tempi di calcolo ciò rappresenta un sostanziale miglioramento in quanto, quest’approssimazione statica, permette una drastica diminuzione dei gradi di libertà del problema.
H
H
am- 35 -
2.3 Introduzione del freeplay nel modello
L’equazione della dinamica strutturale derivata nel precedente paragrafo è stata ricavata considerando un comportamento lineare della struttura, la presenza di non linearità strutturali può però influire sulla stabilità dinamica di un sistema aeroelastico. Malgrado ciò non sono presenti in letteratura molti studi sulla correlazione tra non linearità strutturali e instabilità aeroelastica. In particolare, per quanto concerne il rapporto esistente tra il buzz delle superfici di controllo del bordo di uscita e la presenza di non linearità di tipo freeplay nella catena di comando, la letteratura è ancora abbastanza scarsa e spesso limitata a casi bidimensionali [17][18]. Questi studi si basano su un modello costituito da un profilo alare flappato in cui la rigidezza dell’attuatore è schematizzata tramite una molla torsionale (fig. 2.7):
Fig. 2.7 Modello strutturale 2D. Immagine tratta da Rif. [17].
Al profilo, considerato rigido in corda, viene così consentito di traslare verticalmente e di ruotare attorno al suo asse elastico mentre il flap può ruotare attorno al suo asse di cerniera. Il modello così ottenuto risulta particolarmente semplice in quanto dotato di soli 3 gradi di libertà: plunge, pitch e deflessione dell’alettone. Le matrici di massa e rigidezza del modello sono quindi date dalle relazioni:
- 36 -
in cui le grandezze che compaiono hanno il seguente significato: massa del profilo compreso l’alettone.
momenti statici di inerzia rispettivamente del profilo comprensivo di alettone (rispetto all’asse elastico) e dell’alettone (rispetto all’asse di cerniera).
momenti di inerzia rispettivamente del profilo comprensivo di alettone (rispetto all’asse elastico) e dell’alettone (rispetto all’asse di cerniera). posizione dell’asse di cerniera rispetto all’asse elastico.
rigidezze delle molle (come da figura).
Per quanto riguarda gli elementi della matrice di smorzamento strutturale il modello prevede che vengano calcolati sulla base di prove sperimentali.
La presenza del gioco in corrispondenza della cerniera fa sì che il valore di vari a seconda della deflessione dell’alettone. Alternativamente, seguendo la strada percorsa da Bartels [19], si può assimilare l’effetto della non linearità strutturale a quello di una forzante esterna riscrivendo l’equazione del moto come:
dove rappresenta il vettore degli spostamenti fisici. Il momento torcente di richiamo è quindi modellato come la somma di un termine lineare e di un termine non lineare . Operando infine la consueta trasformazione su base modale si ottiene:
- 37 -
L’analisi dei fenomeni di ciclo limite affrontata in questo lavoro richiede l’adozione di un modello strutturale molto più complesso rispetto a quello appena visto. Ciò è dovuto prevalentemente al fatto che, dal punto di vista aerodinamico, la superficie verticale di coda risente delle perturbazioni indotte dalla presenza del resto dell’aereo. La natura aeroelastica del problema impone pertanto l’utilizzo di un modello tridimensionale del velivolo completo nel quale si tenga conto anche della sua deformabilità. L’input del solutore strutturale è costituito sostanzialmente dalle matrici , e che, come vedremo più nel dettaglio nel capitolo 4, dovranno essere necessariamente ortogonalizzate. In particolare, le matrici di massa, smorzamento e rigidezza saranno riferite a 41 modi propri deformabili. L’aggiunta del modo rigido di rudder implicherebbe pertanto una “orlatura” di tali matrici con conseguente perdita di ortogonalità tra i modi. La scelta operata in questo lavoro consiste quindi nell’approssimare il modo rigido di rudder con il modo ad esso più vicino come forma e frequenza. Sebbene questa approssimazione non sia strettamente corretta dal punto di vista formale, nella pratica risulta accettabile in quanto, un errore del primo ordine nella scelta di un autovettore comporta un errore del secondo ordine sul corrispondente autovalore [20], ovvero sulla frequenza del modo. Ai fini di un’analisi dinamica i due modi, rigido e deformabile, avranno quindi un comportamento simile.
- 38 -
Possiamo quindi scrivere l’equazione aeroelastica modificata dai termini relativi alla non linearità strutturale di tipo freeplay come:
Indicando col pedice “i” il modo con freeplay si ha:
dove, per un intervallo di gioco simmetrico di ampiezza , si è posto:
Il fattore moltiplicativo rappresenta lo scostamento dal freeplay ideale, infatti, per , la molla torsionale ha un comportamento bilineare mentre, per , si ha un vero e proprio gioco con forza di richiamo nulla all’interno dell’intervallo

![Fig. 2.7 Modello strutturale 2D. Immagine tratta da Rif. [17].](https://thumb-eu.123doks.com/thumbv2/123dokorg/7934855.119546/16.893.210.727.542.817/fig-modello-strutturale-d-immagine-tratta-rif.webp)

