3
Aspetti teorici delle simulazioni RANS
Il primo step di una simulazione aerodinamica, mediante metodi numerici, è la definizione di opportuni modelli fisico-matematici atti a garantire una corretta rappresentazione del problema fisico in esame.
Il crescente sviluppo delle tecnologie informatiche, in termini di potenze di calcolo, e la maggiore accessibilità a calcolatori sempre più potenti da parte delle aziende o dei centri di ricerca, hanno permesso di implementare algoritmi di calcolo di complessità ed accuratezza crescente.
La bontà però di un’analisi numerica di un problema aerodinamico non è da valutare solo relativamente ai risultati che essa fornisce, ma anche, soprattutto in ambito industriale, relativamente ai tempi di calcolo e quindi ai costi che tale analisi comporta.
I modelli più avanzati di cui attualmente si può disporre, infatti, a fronte di un’analisi molto accurata del problema aerodinamico richiedono tempi di calcolo troppo elevati, e spesso forniscono una quantità di dati tale da andare ben oltre le richieste di un’azienda.
In questo capitolo sono presentati i modelli matematici e gli algoritmi di calcolo che, allo stato attuale, trovano maggior impiego all’interno delle simulazioni numeriche condotte per applicazioni industriali.
Si tratta essenzialmente di simulazioni RANS (Reynolds Averaged Navier Stokes), ovvero simulazioni condotte sulla base di un modello matematico ricavato mediante operazioni di media delle equazioni di Navier e Stokes.
3.1 Il modello fisico-matematico
3.1.1 Le equazioni di Navier e Stokes
La trattazione classica della fluidodinamica si fonda sull’ipotesi che tutti i fluidi possono essere considerati mezzi continui deformabili.
Partendo, infatti, dal presupposto che determinate grandezze quali la massa, la quantità di moto e l’energia soddisfino precise equazioni di bilancio, Navier e Stokes pervennero al famoso set di equazioni che ancora oggi porta il loro nome e che, accoppiato ad opportune equazioni costitutive del mezzo continuo in esame, ne descrive il moto come se si trattasse di un qualunque sistema dinamico.
Di seguito si riporta il set completo delle equazioni di Navier e Stokes sotto le ipotesi di fluido comprimibile di tipo Newtoniano - Stokesiano:
Le generiche componenti del tensore degli sforzi sono:
Nell’ipotesi di fluido incomprimibile il set di equazioni precedenti è notevolmente semplificato dal disaccoppiamento dell’equazione di bilancio
0 (3.1)
· (3.2)
/2
· /2 · (3.3)
dell’energia totale 3.3 dalla 3.1 e 3.2, che rappresentano rispettivamente il bilancio della massa e il teorema della quantità di moto; per simulazioni in cui il fluido in esame è l’aria risultano trascurabili i termini derivanti dalla forza gravitazionale e, se non si è interessati al campo termico, si può scrivere:
Le componenti del tensore degli sforzi, in questo caso, risultano:
Per cui la 3.5 e la 3.6 diventano:
Date le caratteristiche del flusso rappresentate all’interno delle simulazioni oggetto del presente lavoro di tesi, da questo punto in avanti della relazione si è fatto sempre riferimento a flussi incomprimibili ed adiabatici, per cui le successive argomentazioni hanno come base le equazioni 3.8 e 3.9.
0 (3.5)
· (3.6)
(3.7)
0 (3.8)
3.1.2 La turbolenza
Le equazioni precedentemente illustrate descrivono il moto di qualsiasi corrente viscosa sia essa comprimibile (equazioni 3.1, 3.2 e 3.3) che incomprimibile (equazioni 3.8 e 3.9); a questo punto però è necessario fare alcune considerazioni sul regime di moto di tali correnti.
Definito il numero di Reynolds come:
dove rappresenta la velocità media della corrente, una lunghezza caratteristica e la viscosità cinematica1 del fluido in esame, è possibile utilizzare tale parametro adimensionale come uno dei discriminanti tra il regime di moto laminare e quello turbolento.
Numeri di Reynolds sufficientemente bassi garantiscono, infatti, che il regime di moto, in assenza di perturbazioni esterne, si mantenga laminare, mentre per numeri di Reynolds più elevati si innescano fenomeni di instabilità tali da determinare regimi di moto turbolenti.
Esclusi, quindi, i moti che avvengono a velocità ridotte e che si sviluppano su lunghezze caratteristiche molto piccole, la maggior parte delle correnti fluide analizzate in ambito industriale ha carattere turbolento.
Le caratteristiche di un moto turbolento possono riassumersi nei seguenti punti [3, 4]:
1) tridimensionalità;
2) non stazionarietà, e quindi sensibili fluttuazioni temporali delle variabili fluidodinamiche su un’ampia banda di frequenze, anche in presenza di condizioni al contorno stazionarie;
1La viscosità cinematica è definita come:
3) vorticità, ovvero presenza di un vettore, rotore della velocità, variamente orientato ed irregolarmente distribuito dello spazio e nel tempo;
4) intenso rimescolamento, e cioè una diffusione di tutte le variabili fisiche scalari e vettoriali, ben maggiore di quella puramente molecolare;
5) apparente casualità del moto.
Come scritto in precedenza le correnti turbolente sono caratterizzate da numeri di Reynolds elevati; il numero di Reynolds, però, è anche definito come il rapporto tra le forze d’inerzia e le forze viscose agenti in un fluido, o meglio, il rapporto tra la velocità di convezione e quella di diffusione, per cui quanto affermato nel precedente punto 4 sembrerebbe contrastare con le caratteristiche proprie di un flusso ad elevato numero di Reynolds.
In realtà, tutte le volte che il numero di Reynolds diventa grande, e quindi le componenti convettive del moto tendono a prevalere su quelle diffusive, nel fluido si innescano dei meccanismi (comunemente conosciuti con il nome di cascate energetiche) tali da garantire che le forze viscose restino comunque fondamentali, e che quindi il flusso presenti caratteristiche fortemente diffusive.
Com’è facilmente osservabile, infatti, in qualsiasi corrente turbolenta sono presenti strutture vorticose con scale spaziali e temporali che differiscono tra di loro anche di diversi ordini di grandezza.
La nascita di un così ampio spettro di scale spaziali e temporali è imputabile al fenomeno della cascata energetica e l’aumentata diffusività del flusso è strettamente correlabile alle strutture vorticose con le scale più piccole che proprio tale fenomeno produce.
La cascata energetica, infatti, è caratterizzata, oltre che dalla produzione di strutture vorticose a scale spaziali più piccole, da un continuo trasferimento di energia cinetica dalle strutture più grandi ad elevato grado di instabilità, e che presentano numeri di Reynolds più elevati, a quelle più piccole (strutture o microscale di Kolmogorov), i cui valori del numero di Reynolds sono
dell’ordine dell’unità e per le quali, quindi, le componenti convettive del moto sono dello stesso ordine di grandezza di quelle diffusive, se non addirittura maggiori.
Il processo di trasferimento energetico, e di generazione di strutture con dimensioni sempre più piccole, termina non appena le dimensioni delle strutture più piccole sono tali da garantire un sufficiente grado di stabilità e l’energia cinetica, non potendo più essere trasferita viene dissipata sotto forma di calore.
La presenza quindi, delle strutture vorticose più piccole, ed il loro maggiore livello energetico, fa si che i normali meccanismi di diffusione della quantità di moto e del calore risultino amplificati.
Una prima diretta conseguenza di tale fenomeno è, ad esempio, la modifica dei profili di velocità all’interno dello strato limite in prossimità di pareti solide (figura 3.1) e un diverso comportamento del flusso rispetto alla separazione. Le particelle all’interno dello strato limite hanno, in questo caso, una maggiore quantità di moto e di conseguenza una maggiore energia, che permette al flusso di resistere meglio ai gradienti avversi di pressione, principali responsabili della separazione del flusso; per contro si assiste ad un aumento degli sforzi tangenziali alla parete, dato che questi ultimi sono direttamente proporzionali al gradiente della velocità nella direzione normale alla parete (vedi figura 3.1).
Figura 3.1 Profili di velocità y
U
Profilo di vel. laminare Profilo di vel. turbolento
3.2 Metodologie RANS per l’integrazione delle
equazioni di Navier e Stokes
Allo stato delle conoscenze attuali, è possibile integrare numericamente le equazioni di Navier e Stokes, dopo averle opportunamente discretizzate ed adimensionalizzate, senza bisogno di alcuna operazione matematica aggiuntiva o di alcuna ipotesi o modello ulteriori.
Sebbene tale procedura di calcolo, comunemente conosciuta con il nome di DNS (Direct Numerical Simulation), rappresenti un enorme passo in avanti nello studio della fluidodinamica computazione, resta di fatto inapplicabile, almeno per il momento, per la risoluzione di problemi aerodinamici di interesse industriale.
Le ragioni della scarsa applicabilità delle simulazioni DNS ai problemi pratici vanno ricercate nell’enorme richiesta di risorse computazionali che esse richiedono. Per questo tipo di simulazioni, infatti, è necessario non solo discretizzare il dominio di calcolo con elementi aventi le dimensioni tipiche delle strutture turbolente più piccole (microscale di Kolmogorov), ma anche adottare un passo di avanzamento delle soluzioni nel tempo che deve essere tanto piccolo da riprodurre in modo corretto il comportamento dinamico di tali strutture.
Come ordine di grandezza, essendo la dimensione delle scale più piccole inversamente proporzionale al numero di Reynolds globale, si può scrivere che, per una simulazione DNS in tre dimensioni, il numero di celle di
calcolo è pari a ⁄ [4, 5].
Una delle tecniche di integrazione delle equazioni di Navier e Stokes maggiormente utilizzata in ambito industriale, è quindi quella che prevede un’operazione di media delle suddette equazioni secondo le tecniche introdotte da Reynolds.
Se la simulazione di una corrente turbolenta è limitata al solo moto medio si ottengo, infatti, consistenti vantaggi in termini di risorse di calcolo.
Il moto medio ha inoltre tempi caratteristici più lunghi di quelli delle strutture turbolente più piccole e non richiede passi di integrazione estremamente ridotti.
Se poi la corrente è in media stazionaria viene a cadere del tutto l’esigenza di un campionamento temporale.
Anche la discretizzazione spaziale, grazie alla scomparsa della totalità delle strutture turbolente, è commisurata soltanto ai soli gradienti del moto medio ed è quindi di alcuni ordini di grandezza più grande rispetto ad una simulazione DNS.
3.2.1 Le equazioni mediate di Reynolds (RANS)
Per ricavare le equazioni mediate di Reynolds (RANS), si effettua anzitutto una scomposizione di ognuna delle generiche variabili fluidodinamiche in una componente media (denotata con il trattino orizzontale) e una componente fluttuante (denotata con l’apice):
Per problemi mediamente non stazionari, la componente media del flusso viene ricavata utilizzando l’operatore di media d’insieme:
Utilizzando le espressioni 3.11 e 3.12, la componente fluttuante è perciò così definita:
, , (3.11)
1
Applicando l’operatore di media precedentemente descritto (equazione 3.12), o un operatore di media equivalente alla media d’ insieme, all’ equazioni del bilancio della massa (equazione 3.8) e all’equazione che esprime il teorema della quantità di moto (equazione 3.9), si ottiene il sistema delle equazioni di Navier e Stokes mediate da Reynolds:
Dove τ è il tensore degli sforzi di Reynolds :
A parte l’operatore di media, le 3.14 e 3.15 differiscono dalle 3.8 e 3.9 per la presenza del termine che esprime la divergenza del tensore degli sforzi di Reynolds. Tale tensore, date le proprietà dell’operatore di media, è
simmetrico, e la sua generica componente è indicabile come .
É utile sottolineare che sforzi di Reynolds non esistono da un punto di vista fisico, ma derivano dal processo di media delle equazioni di Navier e Stokes; la presenza degli sforzi di Reynolds è quindi fonte di ulteriori sei variabili che vanno opportunamente calcolate per tener conto degli effetti delle fluttuazioni, dovute alla turbolenza, delle grandezze fluidodinamiche.
, , (3.13)
0 (3.14)
· (3.15)
Per esprimere le componenti del tensore degli sforzi di Reynolds in funzione delle sole componenti medie delle grandezze fluidodinamiche in esame è perciò necessario introdurre dei modelli di chiusura delle equazioni RANS, chiamati comunemente modelli di turbolenza.
I limiti di un tale approccio all’integrazione delle equazioni di Navier e Stokes va ricercato nell’impossibilità di formulare un modello di turbolenza applicabile in generale per diverse tipologie di problemi aerodinamici.
3.2.2 I modelli di turbolenza
Il software Fluent, con cui sono state condotte sia le simulazioni stazionarie RANS che le simulazioni non stazionarie LES, le cui caratteristiche sono riportate all’interno del capitolo 6, consente la scelta tra un’ampia gamma di modelli di turbolenza a diverso grado di complessità.
Nel presente lavoro di tesi sono stati utilizzati i seguenti modelli di turbolenza: • Reynolds Stress Model (RSM);
• Reynolds Stress Model (RSM) low-Re stress-omega; • Realizable - Model;
• Shear Stress Transport (SST) - Model.
Tale scelta è dovuta alla necessità di indagare il comportamento dei diversi modelli di turbolenza nei confronti della separazione, non fissata dalla geometria, mediante l’analisi dell’effetto dell’arrotondamento della parte posteriore di un corpo tozzo tridimensionale sulla resistenza dello stesso.
3.2.2.1 Il modello Reynolds Stress (RSM)
Il modello Reynolds Stress è uno modelli più recenti introdotti in Fluent, nonché tra i più elaborati.
A fronte di una maggiore adattabilità a problemi aerodinamici complessi, come i problemi di aerodinamica esterna dei corpi tozzi, tale modello richiede
un maggiore costo computazionale perché risolve, per ognuna delle sei
componenti del tensore degli sforzi di Reynolds, , un’equazione
differenziale di trasporto; a queste sei equazioni è aggiunta poi un’equazione di trasporto per il rateo di dissipazione .
Le equazioni di trasporto che modellano le componenti del tensore degli sforzi di Reynolds sono del tipo [6, 7]:
I termini , , , e presenti nell’equazione 3.17 non richiedono alcun
tipo di modellizzazione, mentre i termini , , , , e necessitano di un’opportuna modellizzazione.
Infatti, i termini di diffusione turbolenta , e di pressure strain (per i quali si è utilizzato il modello linear pressure strain) sono così rappresentabili2:
2 Per i valori delle costanti σ , C , , C′ e C′ presenti nelle espressioni
, e si veda “Fluent 12.0 Theory Guide” paragrafi 4.9.3 e 4.9.4 [6].
,
2 2
,
+
dove
e,
I termini , , e presenti nella 3.21 sono definiti nella 3.17 mentre i termini , e sono rispettivamente:
, (3.18) , , , (3.19) , 2 3 (3.20) , 5 6⁄ 2 3 5 6⁄ (3.21) 1 2 1 2 1 2
Infine,
con
e
è la costante di von Karman (=0.4187), mentre è la distanza dalla parete. I termini di buoyancy production , presenti all’interno dell’equazione 3.17, sono invece modellati attraverso la seguente espressione:
dove
è il numero di Prandtl turbolento ed è tipicamente pari a 0.85.
, 32 32 ⁄ , 32 , 32 , (3.22) ⁄ ⁄ 0.09 (3.23)
Considerando che, per un gas ideale, il coefficiente di espansione termica è
si può scrivere al posto della 3.23, la seguente espressione per i termini :
Le componenti, , del tensore di dissipazione, sono definite come:
dove il termine introduce all’interno della 3.25 gli effetti derivanti dalla comprimibilità del fluido per simulazioni ad elevato numero di Mach. Nello specifico questo termine non è preso in considerazione visto quanto affermato nel sottoparagrafo 3.1.1.
Lo scalare, , è calcolato attraverso l’equazione di trasporto3 3.26:
mentre la viscosità turbolenta è definita infine come
3 Per i valori delle costanti σ , C , presenti nelle espressioni di si veda “Fluent 12.0
1 (3.24) 2 3 (3.25) 1 2 (3.26)
Il valore dell’energia cinetica turbolenta , presente nelle equazioni precedenti, per il flusso nelle immediate vicinanze dei contorni solidi, è valutato attraverso l’equazione di trasporto 3.28 :
mentre il valore di utilizzato all’interno del campo aerodinamico è valutato attraverso l’espressione 3.29:
3.2.2.2 Il modello Reynolds Stress (RSM) low-Re
stress-omega
Il modello RSM low-Re stress-omega, è un nuovo modello di turbolenza introdotto all’interno di Fluent 6.3 e recentemente aggiornato in Fluent 12.0. Questo modello è basato sulle equazioni di trasporto del rateo di dissipazione specifica e sul modello LRR4, ed è stato sviluppato per riuscire a rappresentare in modo efficace i flussi su superfici curve o che presentano un moto globale di rotazione.
4 Per maggiori informazioni sul modello LRR di veda “Turbulence Modeling for CFD” [8].
0.09 (3.27) 1 2 1 2 (3.28) 1 2 (3.29)
Per il modello RSM low-Re stress-omega, l’equazione 3.19 introdotta nel precedente paragrafo diventa5:
dove,
, β0 e γ0 sonoopportune costanti6, mentre i termini ed sono:
e,
5 Per i valori delle costanti utilizzate nel modello RSM low-Re stress-omega si veda “Fluent
12.0 Theory Guide” paragrafo 4.9.4 e il paragrafo 4.5.1 [6].
6 Per i valori delle costanti utilizzate nel modello RSM low-Re stress-omega si veda “Fluent
, , (3.30) 2 3⁄ 1 3⁄ 1 3⁄ 1 3⁄ (3.31) (3.32) 1 2 (3.33)
e sono gli stessi definiti nel modello7 Standard - .
Il modello RSM low-Re stress-omega, non richiede delle funzioni di smorzamento della produzione viscosa per risolvere il flusso nelle zone vicino ai contorni solidi; nonostante ciò, è possibile attivare per questo modello le così dette low-Re corrections che, in linea teorica, garantiscono una migliore modulazione del flusso in prossimità dei contorni solidi.
Utilizzando le low-Re corrections per questo modello di turbolenza, infatti, le costanti , β0 e γ0 sono sostituite da , e , le cui espressioni sono8:
ed infine
7 Per le espressioni di e si veda “Fluent 12.0 Theory Guide” paragrafo 4.5.1 [6].
8 Per i valori delle costanti utilizzate nelle low-Re corrections per modello RSM low-Re
stress-omega si veda “Fluent 12.0 Theory Guide” paragrafo 4.9.4 [6].
(3.34) 1 ⁄ 1 ⁄ (3.35) ⁄ 1 ⁄ (3.36) 0.007 ⁄ 1 ⁄ (3.37)
3.2.2.3 Il modello Realizable - (Re - )
Nel modello Realizable - sono utilizzate, per la chiusura delle equazioni mediate di Navier e Stokes, due equazioni di trasporto, una formulata per l’energia cinetica turbolenta , e una per il rateo di dissipazione .
Tale modello di turbolenza rappresenta un recente sviluppo del modello - e differisce da quest’ultimo per:
• una diversa formulazione della viscosità turbolenta ;
• una nuova equazione di trasporto per il rateo di dissipazione .
Il modello Realizable - , come del resto gli altri modelli di turbolenza che utilizzano due equazioni di trasporto per la chiusura delle equazioni RANS ( - , RNG - , - e SST - ), adottano l’ipotesi di Boussinesq per modellare le componenti del tensore degli sforzi di Reynolds (equazione 3.38), assumendolo proporzionale, tramite il coefficiente , alle componenti
(equazione 3.39) del tensore medio di velocità di deformazione.
Le equazioni di trasporto per l’energia cinetica turbolenta e per il rateo di dissipazione sono (equazioni 3.40 e 3.41):
2 3 (3.38) 1 2 (3.39) (3.40)
dove,
L’espressione con cui viene calcolata la viscosità turbolenta all’interno del modello Realizable - è formalmente analoga a quella del modello Standard
- , ovvero (equazione 3.45):
In questo caso però, non ha più un valore costante, ma viene ricavato mediante l’espressione: √ (3.41) 0.43, 5 (3.42) (3.43) 2 (3.44) (3.45)
dove mentre, e 1 (3.46) (3.47) 2 (3.48) (3.49) √6 (3.50) 1 3 √6 (3.51) (3.52)
Le costanti9 utilizzate all’interno del modello Realizable - , sono A , C , C ,
σ e σ .
Il termine , rappresentante la produzione di energia cinetica turbolenta all’interno delle 3.40, è valutato attraverso l’espressione 3.55:
mentre il termine , presente sia nella 3.40 che nella 3.41, si può scrivere come
dove è la componente del vettore accelerazione gravitazionale in direzione i. La 3.56, riscritta per un gas ideale, diventa invece:
9 Per i valori delle costanti utilizzate nel modello Realizable - di veda “Fluent 12.0 Theory
Guide” paragrafo 4.4.3 [6]. (3.53) 1 2 (3.54) (3.55) (3.56) (3.57)
3.2.2.4 Il modello SST -
Il modello di turbolenza Shear Stress Transport (SST) - rappresenta una evoluzione del modello di turbolenza Standard - , operata per riuscire a fornire un miglior comportamento del flusso vicino ai contorni solidi.
Il modello SST - è, infatti, un modello ibrido, perché per simulazioni ad alti numeri di Reynolds utilizza le equazioni tipiche del modello - nelle regioni prossime ai contorni solidi e le equazioni del - per le regioni esterne.
Le equazioni di trasporto per il modello SST - , tipicamente una per l’energia cinetica turbolenta e una per il rateo di dissipazione specifica , vengono quindi così definite:
I termini Γ e Γ rappresentano i termini di diffusività effettiva di e , e G i corrispettivi termini di generazione ed infine e quelli di dissipazione10. Si può perciò scrivere:
10 Per i valori delle costanti utilizzate nel modello SST - di veda “Fluent 12.0 Theory
(3.58)
(3.59)
dove e (3.61) 1 1 , (3.62) 1 , 1 ⁄ , ⁄ (3.63) 1 , 1 ⁄ , ⁄ (3.64) (3.65) √ 0.09 , 500 , 4 , (3.66) 2 1 , 1 , 10 (3.67)
(equazione 3.67) rappresenta la componente positiva del termine di cross-diffusion definito come:
Il parametro , presente nell’espressione della viscosità turbolenta
(equazione 3.62), e che solitamente è posto pari a 1 all’interno delle
simulazioni ad alto numero di Reynolds, può essere modulato, attraverso le low-Re corrections, per migliorare il comportamento del flusso alla parete, operando così uno smorzamento della produzione viscosa. Infatti:
I termini di produzione di e , rispettivamente e sono definiti come:
dove, (3.68) 2 √ 0.09 , 500 (3.69) 2 1 , 1 (3.70) ⁄ 1 ⁄ (3.71) , 10 (3.72)
e
Il termine può essere così definito11:
Infine, i termini di dissipazione, e , sono modellati attraverso le seguenti espressioni:
11 Per le espressioni di α
∞, e α∞, si veda “Fluent 12.0 Theory Guide” paragrafi 4.5.2 [6]. (3.73) (3.74) ⁄ 1 ⁄ (3.75) , 1 , (3.76) (3.77) (3.78)
3.2.3 Caratterizzazione numerica del flusso vicino ai contorni
solidi per le simulazioni RANS
Caratterizzare dal punto di vista numerico un flusso nei pressi dei contorni solidi non è un’operazione banale, e il più delle volte tale caratterizzazione non solo influenza il valore delle variabili calcolate a parete ma anche il valore delle variabili calcolate nel resto del campo aerodinamico, determinando di fatto l’attendibilità dell’intera simulazione numerica.
3.2.3.1 Caratterizzazione numerica dello strato limite turbolento
La chiave di volta per riuscire a valutare, con una simulazione numerica, le caratteristiche di un flusso nei pressi dei contorni solidi è quella di riprodurre, nel modo più dettagliato possibile, lo strato limite che tale flusso genera. Lo strato limite può, inoltre, essere definito come quella regione del fluido in cui la risultante delle azioni tangenziali viscose ha un ordine di grandezza uguale o superiore a quella delle forze di inerzia.
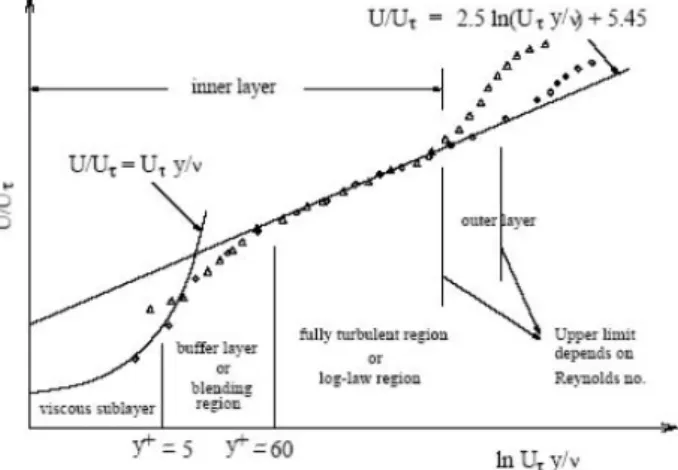
Numerose campagne di prova sperimentali hanno dimostrato che uno strato limite turbolento, che come scritto nel paragrafo 3.1.2 è tipico della maggior parte dei problemi di interesse industriale, può essere suddiviso in quattro zone con differenti caratteristiche.
L’estensione e le proprietà delle diverse zone, in cui è suddiviso lo strato limite turbolento, sono valutate mediante la grandezze adimensionali e , definite come:
⁄
(3.79)
Lo strato limite turbolento risulta quindi suddiviso in:
• un viscous sublayer, che rappresenta la regione dello strato limite più vicina alla parete solida e per la quale di può scrivere che:
5
• una log-law region, ovvero la regione più esterna dello strato limite per la quale valgono le seguenti relazioni:
60 500 1
con c1ec opportune costanti;
• un buffer layer che, posto tra il viscous sublayer e la log-law region, presenta caratteristiche intermedie tra queste due zone e per il quale vale:
5 60
• una wake region, ovvero la regione più esterna della strato limite per la quale si può scrivere:
La figura 3.2 riassume quanto sopra scritto.
3.2.3.2 Discretizzazione e soluzione dello strato limite turbolento
all’interno di una simulazione RANS
Convenzionalmente esistono due approcci diversi per la discretizzazione e la soluzione dello strato limite turbolento all’interno di una simulazione RANS. Si può infatti scegliere di discretizzare le zone vicine ai contorni solidi con griglie di calcolo molto raffinate (y+ ≤ 1), e conseguentemente adottare modelli di turbolenza in grado di poter risolvere lo strato limite tenendo conto degli effetti sul flusso derivanti dalla vicinanza con pareti (condizione di non scorrimento alla parete per il flusso medio, smorzamento della produzione viscosa a parete, bassi numeri di Reynolds, ecc..).
Oppure si può far ricorso alle così dette wall functions, ovvero appositi modelli matematici in grado di mimare il comportamento del flusso a parete. Le wall functions, proprio perché non richiedono griglie di calcolo molto raffinate ( 30 ≤ y+ ≤ 50) in corrispondenza dei contorni solidi, consentono di ottenere importanti risparmi in termini di risorse di calcolo.
Il codice Fluent 12.0 consente di poter scegliere tra tre diverse tipologie di wall functions12:
• standard wall functions;
• non equilibrium wall functions; • enhanced wall functions.
Nel presente lavoro di tesi, per le simulazioni con il modelli di turbolenza RSM e Realizable - (vedi paragrafi 3.2.2.1 e 3.2.2.3), sono state utilizzate le non equilibrium wall functions che risultano maggiormente adatte a modellare le caratteristiche a parete di un flusso separato; mentre per le simulazioni con i modelli SST - e RSM low-Re stress-omega (vedi paragrafi 3.2.2.2 e 3.2.2.4) non è stato necessario settare alcun tipo di wall functions proprio perché tali modelli possono essere applicati direttamente fino alla parete ed eventualmente modificati tramite le low-Re corrections.
12 Per le espressioni delle wall function si veda “Fluent 12.0 Theory Guide” paragrafo 4.12