6 IL MECCANISMO CINEMATICO DI COLLASSO DI
KECMAN
6.1 Osservazioni sul fenomeno
Kecman (1979) ha affrontato il problema del collasso di un tubo metallico soggetto a flessione monoassiale, ipotizzando un modello cinematico basato su cerniere plastiche lineari (yield lines).
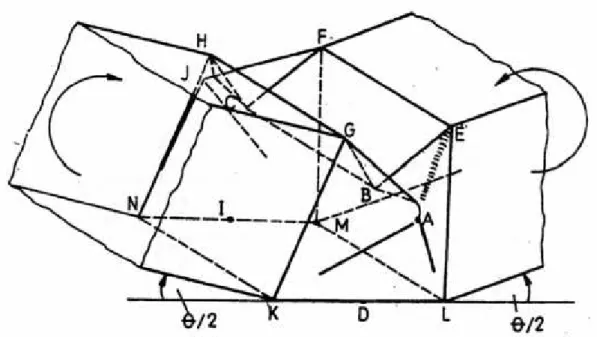
Il meccanismo si forma tra due tratti indeformati della trave, delimitato da due poligoni che per lati hanno le cerniere che si formano sulle quattro pareti della sezione (GHNKG e EFMLE in figura 6.1).
Figura 6.1 - Schematizzazione del modello cinematico
La validità del modello è stata confermata da una numerosa serie di prove effettuate in laboratorio su vari tipi di sezioni tubolari.
Osservando le deformazioni della zona della cerniera di un profilo a sezione quadrata (38x38x1.6), ed effettuando una serie di misure con l’impiego di estensimetri, attraverso una precisa analisi del meccanismo plastico, Kecman ha elencato i punti essenziali del fenomeno:
a. La maggior parte della deformazione plastica si concentra lungo le “linee stazionarie di snervamento” (stationary yield lines) EF, GH, EB, GB, FC, HC, BC, BA, CJ, GK, HN, EL, FM (figure 6.1 e 6.2).
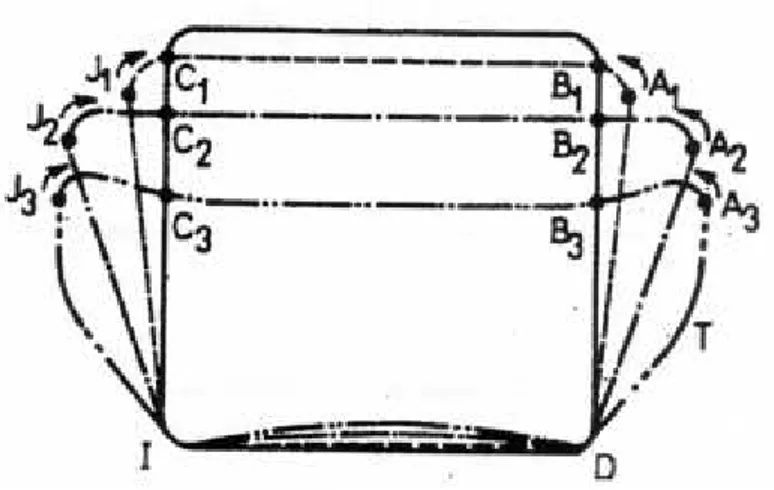
b. Sono state osservate “linee di snervamento” mobili lungo GA, EA, KA, e LA. Ciò è dovuto al fatto che la distanza BA varia durante la rotazione della cerniera (il punto A in figura 6.1 corrisponde all’apice del rigonfiamento osservabile in figura 6.2 nei punti A1, A2, A3).
Figura 6.2 - Le diverse fasi del meccanismo plastico
c. L’angolo dello spigolo lungo i lati KL e MN rimane pressoché costante (figura 6.1). d. La configurazione deformata del tratto della flangia tesa, compresa tra le linee di
snervamento NK e ML (linea tratteggiata in figura 6.3), corrisponde approssimativamente all’intersezione del piano corrispondente alla configurazione indeformata e la superficie cilindrica ID di figura 6.2.
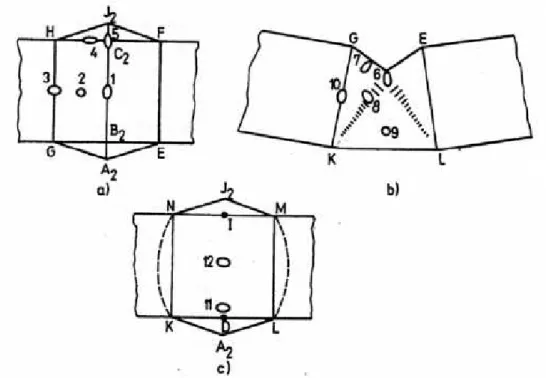
e. Sono state osservate deformazioni nel piano delle pareti, specialmente lungo le linee GA, EA, BA, HJ, FJ e CJ (rolling lines); queste deformazioni sono essenziali per sostenere il cinematismo della cerniera (bozza a forma di goccia in figura 6.3).
f. Il raggio “r”, misurato tagliando ad angolo retto la superficie con vertice nella linea GA, varia leggermente lungo tale linea; il suo valore è proporzionale alla lunghezza della cerniera, r≅(0.03-0.05)·KL. Valori più alti corrispondono a tubi che, a parità delle altre dimensioni, hanno spessori maggiori. Tale raggio si riduce all’aumentare delle deformazioni, la rotazione diviene così sempre più “difficoltosa”, fino a quando il meccanismo si schiaccia e inizia una nuova fase del collasso.
g. Il raggio di rotolamento lungo le linee KA, LA, MJ e NJ, varia dal valore infinito, in K, L, M e N, al limite inferiore “r” visto al precedente punto (f).
Figura 6.3 - Punti caratteristici usati per le misure di deformazione
Kecman ha individuato quattro fasi distinte nella formazione della cerniera:
1. Prima fase : si crea una sporgenza nell’anima (A1 in figura 6.2), all’incirca 0.2·KG sotto la flangia compressa, senza evidenti incurvamenti delle pareti. Questa fase si estende fino ad un angolo della cerniera di 5-10° (valori più alti per sezioni con pareti più spesse).
2. Seconda fase cosiddetta di “rolling” : si hanno le deformazioni elencate in precedenza e una forma della sezione come in figura 6.2 (A2). L’angolo della cerniera è compreso tra 5-10° e 25-35°.
3. Terza fase : nasce quando il meccanismo di “rolling” si sblocca, perché il raggio della bozza in A è divenuto troppo piccolo. La sezione assume quindi la forma B3 A3 T D di figura 6.2. Si creano nuove linee di snervamento AT e TK e tutte quelle a loro simmetriche.
4. Quarta fase : ha inizio con il contatto tra le due parti della flangia compressa. Ciò schiaccia completamente la cerniera formatasi in origine, innescandone una seconda, con nuove linee di snervamento ad una distanza di circa 0.5·KL dalla sezione GHNK.
Tra una fase e l’altra non esiste una chiara separazione, perciò sono presenti anche forme ibride.
Il meccanismo di collasso di profili a sezione rettangolare mostra un comportamento identico a quello osservato per sezioni quadrate; in questo caso la lunghezza della cerniera plastica (KL in figura 6.1) è all’incirca pari al lato minore del rettangolo.
6.2 Il meccanismo teorico di collasso
La teoria del meccanismo di collasso si basa sulla seconda fase di evoluzione del cinematismo. La sperimentazione ha evidenziato che nei diagrammi Momento-Rotazione, il passaggio dalla prima fase alla seconda e dalla seconda alla terza avviene in modo graduale. La teoria si basa sulle seguenti ipotesi:
• Le pareti delle sezioni si deformano esclusivamente lungo le linee di snervamento (yield lines).
• Le pareti sono assunte come incompressibili ed inestensibili, salvo la possibilità di deformazioni nel piano per alcune pareti (deformazioni essenziali al cinematismo).
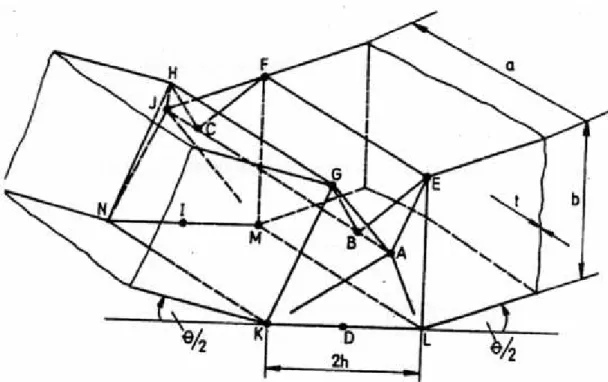
Il primo meccanismo teorico preso in considerazione, figura 6.1, presenta due incognite: la lunghezza della cerniera plastica KL=2h e il raggio “r” della “bozza” in A. Il modello è stato successivamente modificato (figure 6.4 e 6.5), introducendo la semplificazione che la bozza A degeneri in un punto e che i punti A, B, C e J siano sulla stessa linea.
Figura 6.4 - Modello teorico di collasso semplificato
Figura 6.5 - Sezione longitudinale del modello
Dalle ipotesi segue che tutta l’energia viene assorbita dalle deformazioni plastiche lungo le linee di snervamento. Vengono perciò calcolati i contributi di energia assorbita da ogni linea di snervamento, i quali assumono la forma:
Wi = Wi(θ)
Poiché risulta difficile differenziare tale equazione, si può operare calcolando numericamente la curva M(θ)-θ, in base alla seguente relazione:
M(θ)=[ W(θ+∆θ)- W(θ)]/∆θ
Di seguito, sono riportate le formule per il calcolo di M(θ).
Si è indicato con a, b e t, rispettivamente, larghezza della flangia compressa e altezza della sezione e spessore del profilo;
σ
p eσ
pu sono, rispettivamente, tensione di snervamento emassima nominale ricavata alla prova di trazione uniassiale dell’acciaio costituente il profilo.
Il momento massimo Mmax è ottenuto attraverso le seguenti formule:
Mmax =
(
)
+ + ⋅ + + ⋅ ⋅ ⋅ b a b a a b a b t e p 3 2 3 2 2σ
, seσ
cr ≤σ
p Mmax = Mp =[
(
)
(
)
]
2 2 5 0. b t t b a t p ⋅ ⋅ − + −σ
, seσ
cr ≥ 3σ
p Mmax =(
)
p p cr p p p M M' ' Mσ
σ
σ
2 − − + , seσ
p <σ
cr < 3σ
p dove M'p = + ⋅ ⋅ ⋅ 3 b a b t pσ
σ
cr = 2 16 0 23 5 9 0 + ⋅ a t b a . . E . ae = + ⋅ 0.7 0.3 a p crσ
σ
con ae = a, seσ
cr >σ
pLa rotazione disponibile è calcolata dall’elaborazione numerica della formula che fornisce l’energia W(θ), assorbita dalle linee di snervamento del meccanismo postulato da Kecman:
( )
D D Mθ
=( )
D D Wθ
∆
θ
∆
, dove( )
D Wθ
=(
)
(
)
(
) (
)
+ − + − ⋅ + − ⋅ + − ⋅ ⋅ ⋅ 2 2 2 2 2 2 5 0 A '' A ' ' A A A pu y y x h z arctan b z a t .σ
π
β
π
β
+ + + + ⋅ + ⋅ + 2 2 2 3 2 2 2 A A A A A z y h h r z y z arctan hπ
h = 2 b , se a ≥ b o h = 2 a , se a ≤ bβ
= − sinρ
h b arcsin 1zA = b⋅sin2
ρ
−h⋅sinρ
+ b⋅sinρ
⋅(
2h−b⋅sinρ
)
⋅cosρ
'' A x = yA'' ⋅tan
ρ
'' A y =(
)
ρ
ρ
ρ
ρ
ρ
2 1 2 tan sin b h sin b cos b tan h + ⋅ − ⋅ ⋅ − ⋅ + ⋅ r = . D h − 70 07 0θ
= . h − 35 07 0ρ
ρ
= 2 Dθ
Il blocco del meccanismo teorico di collasso avviene quando le due parti della flangia compressa in prossimità della bozza si toccano l’una con l’altra. L’angolo corrispondente a tale condizione è:
θ
J = − ⋅ b t 5 . 0 h arcsin 2La curva (nominale) M(θ)-θ così ottenuta, essendo riferita alla seconda fase, non è in grado di cogliere adeguatamente la prima fase del collasso. Un metodo semplice per approssimare tale fase è quello di tracciare la retta tangente alla curva, passante per il punto noto (0, Mmax).
Dalla forma finale della curva M(θ), si può ricavare un valore di rotazione intersecando la curva con un dato livello di momento plastico (Mpl). Il valore di rotazione calcolato è stato
assunto come il valore della rotazione plastica disponibile, secondo la definizione data nel capitolo 3 (ϕav = ϕrot - ϕpl).
Sono state effettuate 56 prove a flessione per 27 differenti sezioni, aventi rapporto geometrico a/b variabile tra 3.0 e 0.33 e con rapporto a/t tra 128 e 9.14. I risultati ottenuti con l’analisi del modello teorico mostrano un’ottima concordanza con i risultati sperimentali. Con questo tipo di analisi è possibile ottenere, in maniera semplice e rapida, la curva momento rotazione della fase di collasso dell’elemento, nonché la quantità di energia assorbita.
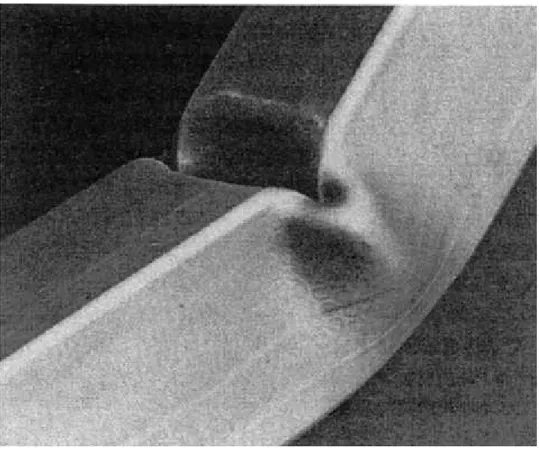
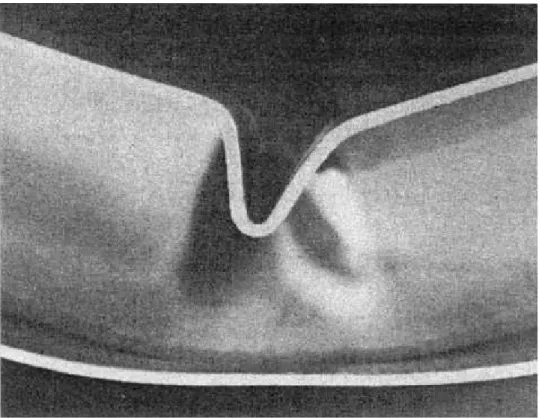
Di seguito sono riportate alcune fotografie che riproducono un profilo RHS, in seguito ad una prova di flessione: si nota come il modello teorico rispecchi fedelmente la configurazione post-collasso reale.
a)
b)