1
LA PROPULSIONE SPAZIALE
1.1 Generalità sulla propulsione spaziale
La spinta prodotta da un motore a reazione è ottenuta, in accordo con la terza legge di Newton, per mezzo dell'accelerazione di un fluido di lavoro nella direzione opposta alla spinta stessa.
Viene chiamato "endoreattore" quel motore in cui il fluido di lavoro e la fonte energetica utilizzati ai fini propulsivi sono entrambi inclusi nel veicolo. L'equazione del moto di un veicolo spinto da un endoreattore in un campo gravitazionale è espressa da [1]:
D
F
U
m
v
M
⋅
&
=
&
⋅
e+
g+
(1.1)dove M è la massa istantanea del veicolo, &v la sua accelerazione, m& è la portata del propellente in uscita dal motore, Ue è la velocità della massa del propellente relativa al
velivolo nella direzione della spinta, se questo esce tutto con tale componente di velocità, oppure è una velocità media equivalente, nel caso in cui la massa di propellente abbia diverse componenti di velocità, Fg è la forza gravitazionale, D è la forza di resistenza
aerodinamica in presenza di atmosfera.
Da notare che la legge di equivalenza utilizzata per definire la Ue è una equivalenza
rispetto alla spinta del propulsore.
Nell'ipotesi di trascurare gli effetti aerodinamici (D=0) e gravitazionali (
F
g=
0
) e considerare il propellente emesso ad una velocità Ue costante l'equazione di moto (1.1)integrata tra l'istante iniziale (istante di accensione del propulsore) e l'istante finale (istante di spegnimento del propulsore), fornisce la nota equazione di Tsiolkowskii:
⋅
=
∆
f i eM
M
U
V
log
(1.2)in cui ∆V rappresenta la variazione di velocità del veicolo essendo espulsa una quantità di
propellente pari a (Mi-Mf).
Le operazioni spaziali sono usualmente definite in termini di un ∆V necessario alla loro
realizzazione. Missioni impegnative come i trasferimenti interplanetari richiedono valori elevati di ∆V e ciò comporta un rapporto tra la massa iniziale e finale del razzo
necessariamente elevato. La ricerca di propulsori caratterizzati da velocità di scarico Ue
confrontabili con i ∆V richiesti è mirata al contenimento di tale rapporto. Tenendo basso il
rapporto tra massa iniziale e finale posso infatti utilizzare una maggiore frazione della massa iniziale per il trasporto del carico pagante, con ovvi vantaggi economici.
Dai dati riportati in Tab 1.1 sui valori caratteristici degli incrementi di velocità per vari tipi di missione si osserva facilmente che si possono raggiungere valori di ∆V dell'ordine di
104 m/s. Per quanto detto sopra si deduce che per certe missioni devono essere sviluppati
propulsori e propellenti che forniscano valori di velocità di scarico dell’ordine di 104 m/s.
Tipo di missione
∆
v manovre (m/s)
Terra – L.E.O.
(270 km di altezza)
7600
L.E.O. – G.E.O.(36000 km di altezza)
4200
L.E.O. – Fuga dalla terra
3200
L.E.O. – Orbita lunare (7 giorni)
3900
L.E.O. – Orbita polare
300
L.E.O. – Marte (0.7 anni)
5700
L.E.O. – Nettuno (29.9 anni)
13400
L.E.O. – Fuga dal sistema solare
87000
L.E.O. – Alpha Centauri (50 anni)
30
⋅
10
6NSSK 50/anno
EWSK 2
÷3/anno
Tab 1.1 ∆ν necessari per vari tipi di missione
1.2 Classificazione dei propulsori
Volendo fare una classificazione dei vari sistemi propulsivi utilizzati dai veicoli spaziali, le peculiarità da sottolineare sono il processo accelerativo utilizzato ed il tipo di energia che viene trasformata in spinta.
I processi accelerativi utilizzati si possono distinguere in:
- gasdinamico: con questo processo si accelera un gas, contenuto ad alta pressione e temperatura all'interno di una camera di reazione, per mezzo di una espansione in un condotto di forma opportuna (ugello);
- elettrostatico: con questo processo si accelera per mezzo di un campo elettrico un fluido elettricamente carico;
- elettrodinamico: con questo processo si accelera un fluido ionizzato ma globalmente neutro (plasma), per mezzo di forze elettromagnetiche derivanti dall'interazione, nel plasma in movimento, di una corrente ed un campo magnetico a questa perpendicolare (Forza di Lorentz).
o e o S g U g m T I = = &
- energia chimica: questo tipo di energia è liberata in seguito ad una qualsiasi reazione chimica esotermica;
- energia nucleare: energia liberata in seguito a fissione o fusione nucleare; - energia elettrica: utile per generare i campi elettrici e/o magnetici necessari per
ionizzare e/o accelerare il propellente.
Al fine di uniformare le informazioni sulle prestazioni dei vari tipi di propulsore si definisce una grandezza strettamente legata alla velocità di scarico equivalente (Ue). Questa
grandezza è l'Impulso specifico (IS) definito come rapporto tra la spinta e l'unità di peso del
propellente. Essendo misurato in secondi, l'Impulso specifico assume lo stesso valore qualunque sia il sistema di misura adottato, rendendone universale l'interpretazione.
Nel caso di spinta e portata costanti si ha:
(1.3)
dove T è la spinta e go è il valore dell'accelerazione di gravità calcolato al livello del
mare.
La seguente Tab 1.2 riassume i processi accelerativi e le energie a disposizione di cui si è parlato sopra, mostrandone le applicazioni a vari propulsori. Sono evidenziati i valori di Is e,
dove significativo, della potenza per unità di spinta richiesta (potenza specifica).
Energia utilizzata Processo
Accelerativo
impiegato Chimica Elettrica Nucleare
Prop. liquidi IS=300-450 sec Resistogetti IS=300-400 sec P'=5 kW/N Gasdinamico Prop. solidi IS=180-250 sec Arcogetti IS=1000 sec P'=10-15 kW/N A Fissione IS=1000 sec Motori a ioni IS=3-5 103 sec P'=30 kW/N RIT IS=3-4.5 103 sec P'=25-30 kW/N Elettrostatico FEEP IS=6000 sec P'=55 kW/N Elettromagnetico IS=2-3 10MPD 3 sec P'=30-40 kW/N A Fusione IS=3000 sec
1.2.1 La propulsione chimica
Nel campo spaziale i propulsori di gran lunga più utilizzati sono quelli chimici con processo accelerativo gasdinamico. Una ulteriore distinzione suddivide questo tipo di propulsori in base allo stato di aggregazione dei propellenti che potranno essere solidi o liquidi. Gli IS caratteristici (Tab 1.3) sono nell'intervallo 180 – 250 sec per i propellenti solidi e nell'intervallo 280 – 500 sec nel caso dei propellenti liquidi.
Il meccanismo fondamentale su cui si basa la propulsione chimica è legato allo sviluppo di calore in camera di combustione in seguito a reazioni chimiche esotermiche ed alla successiva espansione ed accelerazione in un ugello dei prodotti della reazione ad alto contenuto entalpico.
Il propellente, o i propellenti stessi, contengono energia sotto forma di legami chimici a livello molecolare. Non c'è quindi una vera e propria sorgente o sottosistema atto a rendere disponibile questa energia, ma sono le stesse reazioni chimiche che trasformano l'energia chimica del fluido di lavoro in entalpia.
Esistono comunque delle problematiche che limitano le prestazioni dei propulsori chimici:
- l'energia resa disponibile dalle reazioni chimiche esotermiche è limitata dalla presenza di prodotti di reazione indesiderati;
- una quota di energia non può essere sfruttata sia perché resta "congelata" nei moti propri vibrazionali delle molecole del flusso d'uscita (frozen-flow losses), sia a causa delle perdite radiative imputabili al flusso;
- elevati carichi termici e fenomeni di corrosione riguardanti le zone calde del propulsore inducono limiti tecnologici di realizzazione.
Tipo di motore Propellente IS (sec) Liquido O2 – H2 O2 – RP-1 N2O4 – MMH F – H2 F2 – N2H4 450 350 300-340 410 425 Solido
Nitrato d'Ammonio – Resine Perclorato d'Ammonio – Resine Perclorato d'Ammonio – Alluminio
192 262 266 Tab 1.3 Valori dell'Impulso specifico per propulsori chimici
L'utilizzo di una fonte di energia alternativa, come quella nucleare, abbinata ancora ad un'accelerazione gasdinamica, permette di raggiungere una soglia più elevata di energia
disponibile per unità di massa di propellente con incrementi dell'Impulso Specifico fino a 800-1000 sec. La fonte di energia sarebbe costituita da una reazione di fissione nucleare. Sono evidenti i notevoli problemi di sicurezza e di pesi che rendono a tutt'oggi lo sviluppo di questa tecnologia lento e difficoltoso.
1.2.2 La propulsione elettrica
Una valida alternativa alla propulsione chimica, per particolari tipi di missioni richiedenti bassi valori di spinta, è sicuramente la propulsione elettrica. L’energia elettrica può essere utilizzata sia per riscaldare il gas che poi si espande in un apposito ugello, sia per accelerare gas ionizzati attraverso forze elettriche e/o magnetiche.
La propulsione elettrotermica impiega l'energia elettrica per riscaldare il gas ed un processo gasdinamico per accelerarlo:
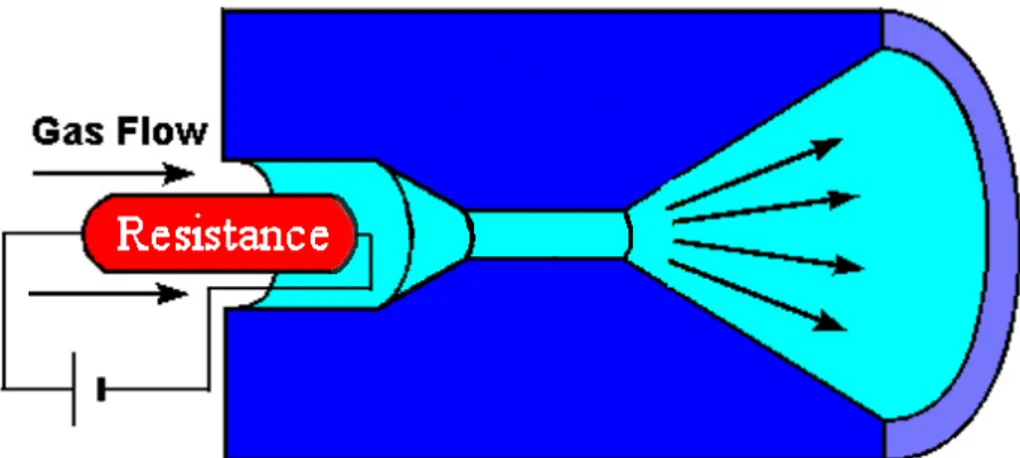
- Resistogetti (Fig. 1.1): il propellente acquista energia fluendo a contatto con una superficie riscaldata per effetto Joule, come spire di filo metallico o condotti, per poi essere accelerato in un ugello fino ad ottenere IS dell'ordine di 200-400 sec;
- arcogetti (Fig. 1.2);: un arco elettrico riscalda direttamente il flusso di propellente che lo investe, essendo l'arco a temperature molto elevate; la scarica elettrica si estende, a forma di ombrello, dalla punta di un catodo centrale fino alla parete dell'ugello coassiale al catodo, subito a valle della sezione ristretta; l'IS è dell'ordine
di 450-1000 sec.
Fig. 1.2 Schema di un arcogetto
Ben diversi sono quei propulsori che impiegano energia elettrica e processo accelerativo elettrostatico e che ci sono classificati come propulsori elettrostatici. Si fa in particolare riferimento ai
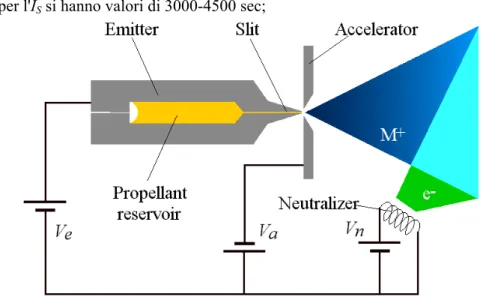
- propulsori ad emissione ad effetto di campo (FEEP) (Fig. 1.3): piccole quantità di propellente liquido sono portate, per capillarità, verso regioni dove un intenso campo elettrico strappa gli ioni dalla superficie del liquido, secondo un meccanismo detto dei coni di Taylor, e quindi li accelera fino ad ottenere un IS di
circa 4000-6000 sec.
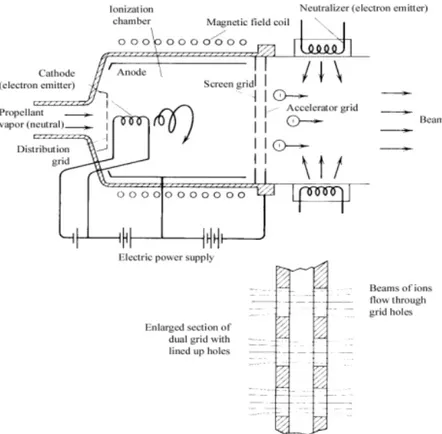
- propulsori a bombardamento elettronico (Fig. 1.4): ioni positivi sono ottenuti dal bombardamento di un gas propellente, come Xeno o Mercurio, da parte di elettroni emessi per effetto termoionico da catodi incandescenti; tali ioni sono successivamente accelerati da un campo di forza elettrostatico generando la spinta; per l'IS si hanno valori di 3000-4500 sec;
Fig. 1.4 Schema di un propulsore a bombardamento elettronico
La propulsione elettromagnetica è utilizzata, infine, da quei motori che usano energia elettrica e processo accelerativo elettromagnetico sfruttando la forza di Lorentz; si distinguono in:
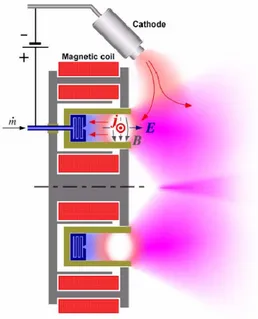
- propulsori MPD (Magneto-Plasma-Dinamici) senza campo magnetico applicato (Fig. 1.5): il propellente fluisce nello spazio tra gli elettrodi e viene ionizzato dalla scarica di corrente presente tra anodo e catodo; l'interazione tra la corrente che attraversa il fluido ed il campo magnetico autoindotto dalla corrente stessa produce una forza di massa che accelera il fluido fornendo la spinta; una ulteriore distinzione si ha in base al funzionamento stazionario o pulsato; l'IS raggiunge i
2000-3500 sec;
- propulsori MPD con campo magnetico applicato (Fig. 1.5): si differenziano dai precedenti per una bobina esterna coassiale al propulsore che introduce un campo magnetico esterno per aumentare la corrente di Hall azimutale e migliorare la spinta;
- propulsori SPT (Stationary Plasma Thruster) (Fig. 1.6): il propellente viene ionizzato da una forte corrente azimutale di elettroni generata dall'interazione di un campo elettrico longitudinale ed un campo magnetico radiale prodotto da una bobina esterna al propulsore; il campo elettrico accelera il propellente ionizzato
grazie anche alla ridotta mobilità assiale degli elettroni vincolati al moto azimutale; i valori dell'IS sono dell'ordine di 2500-3500 sec;
Fig. 1.5 Schema di un propulsore MPD
Fig. 1.6 Schema di un propulsore SPT
1.3 Parametri principali dei propulsori elettrici
In un sistema propulsivo elettrico la sorgente di energia ed il propellente sono distinti, con la conseguenza di dover individuare un preciso sottosistema che fornisca l'energia elettrica: un generatore.
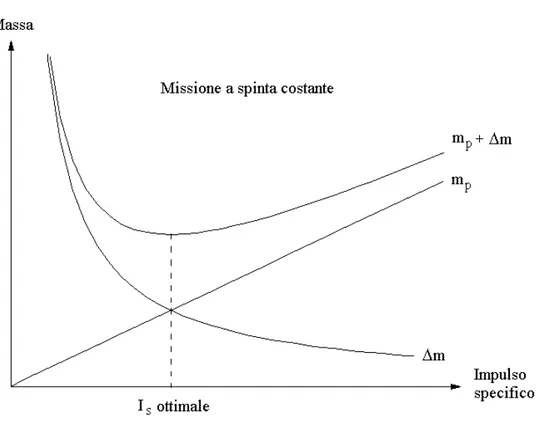
La presenza dell'ulteriore massa dovuta al generatore permette di poter definire un Impulso specifico ottimale in funzione di ciascun sistema propulsivo elettrico.
Definita una missione ed un tempo ∆t per il suo compimento, in condizioni di spinta e portata di propellente costante si può calcolare la quantità di propellente necessaria:
(1.4)
Ipotizzando che la massa del generatore di potenza sia in qualche modo proporzionale alla massima potenza erogata, si può scrivere:
(1.5)
dove
η
è il rendimento di spinta espresso come rapporto tra la potenza di spinta T·Ue/2 ela potenza P in ingresso nel propulsore
:
(1.6)
Da queste ultime relazioni risulta come un propulsore elettrico che fornisce elevato IS,
richiede una potenza elevata, ed avrà bisogno di un generatore di dimensioni adeguate. Si riscontra, all'aumentare dell'IS, una diminuzione della massa di propellente necessario ed un
corrispondente aumento della massa necessaria per la generazione d'energia.
Questo conduce alla condizione di ottimo per cui la somma della massa di propellente e della massa di generazione d'energia risulta minima: tale somma è riportata in funzione dell'impulso specifico nel grafico di Fig. 1.7. Il minimo sul grafico individua l’impulso specifico ottimale che può essere espresso anche analiticamente come
(1.7)
Se IS supera il valore di ottimo il contributo alla massa totale dovuto al generatore diventa
sempre più gravoso. L'espressione dell'impulso specifico ottimo evidenzia come la situazione per i propulsori ad alto impulso specifico diventi tanto più vantaggiosa quanto più è basso il valore della massa specifica del generatore e quanto più è elevato il rendimento di spinta. E' chiaro, quindi, che l'utilizzo futuro di elevati impulsi specifici è vincolato alla capacità tecnologica di poter rendere disponibili generatori che forniscano elevata potenza per unità di massa.
E' altresì opportuno sottolineare come un generatore di energia elettrica possa essere utilizzato anche per far funzionare impianti di bordo, ascrivendo così parte della sua massa a carico utile. e
U
t
T
t
m
m
=
∆
=
∆
∆
&
η
α
η
α
α
2
2
S o e pI
T
g
U
T
P
m
=
=
=
P
I
T
g
P
U
m
P
U
T
e e o S2
2
2
2=
=
=
&
η
α
η
t
g
I
S−ott=
1
2
∆
0Fig. 1.7 Ricerca dell'impulso specifico ottimale
1.4 Impieghi della propulsione elettrica
L'elevato impulso specifico caratteristico dei propulsori elettrici ne rende vantaggioso l'impiego rispetto ai propulsori chimici convenzionali, soprattutto per missioni di lunga durata, consentendo un minor consumo di propellente e quindi una maggior frazione di massa disponibile per il carico utile.
Nota negativa dei propulsori elettrici è che non sono facilmente scalabili: le prestazioni ottenute da ciascun propulsore non sono facilmente riottenibili da altri propulsori semplicemente scalando le dimensioni e le potenze d'ingresso.
Arcogetti e propulsori elettrostatici sono vantaggiosamente utilizzati in applicazioni di controllo d'assetto o di mantenimento dei satelliti artificiali in virtù dell'estrema facilità di accensione e spegnimento, della fine regolazione della spinta permessa, e del minor consumo, peculiarità che si possono riassumere in una maggiore vita operativa.
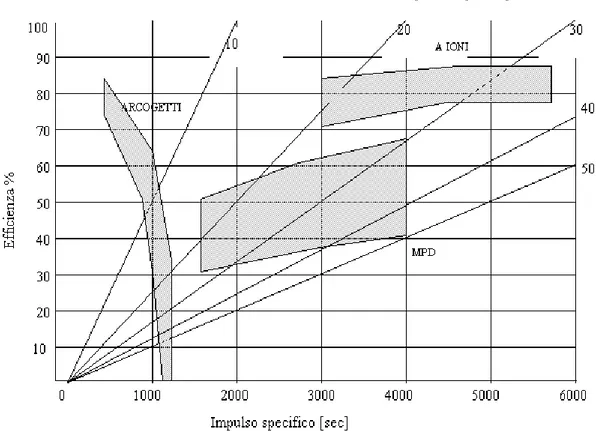
Gli arcogetti presentano elevati livelli di efficienza per bassi valori dell'impulso specifico (IS<1000 sec) ed una potenza specifica dell'ordine di 10 kW/N.
I propulsori a ioni raggiungono valori di efficienza propulsiva dell'ordine dell'80-90% con impulsi specifici variabili tra 3000 e 6000 sec ed una potenza specifica di 25-30kW/N. Gli elevati valori di efficienza raggiunti da arcogetti e propulsori a ioni, uniti al conseguimento
di un sufficiente grado di affidabilità, ha permesso loro di essere tra i primi nell'impiego in applicazioni di controllo d'assetto o mantenimento di stazione.
I propulsori MPD presentano valori sperimentali dell'impulso specifico compresi fra 2000 e 3500 sec, con densità di spinta superiori a 1000 N/mm2, ma bassi valori di efficienza
massima (circa 40%) che non ne consentono un'applicazione competitiva a breve scadenza di tempo. Le notevoli potenze richieste, dell'ordine dei MW per funzionamenti in continuo, sono un altro punto debole per questi propulsori; solo generatori costituiti da reattori nucleari possono risolvere questo problema, introducendo, però, notevoli complicazioni tecniche ed ingegneristiche, come già accennato. Un eventuale utilizzo dei propulsori MPD in regime pulsato quasi stazionario(PQS) può aggirare il problema delle grandi potenze sfruttando la tecnologia dei condensatori per disporre di megawatt di potenza per brevi durate di funzionamento (millisecondi).
Prerogativa per un'applicazione futura di propulsori MPD sarà il raggiungimento di tre obiettivi fondamentali:
- la ricerca di un rendimento propulsivo di almeno il 50%;
- la comprensione di alcuni fenomeni di malfunzionamento che insorgono in determinate condizioni operative (onset);
- una diminuzione dell'erosione del catodo, fattore che riduce in maniera sensibile la vita operativa di tutto il propulsore.
Fig. 1.9 Potenza richiesta in funzione dell'Impulso specifico
In Fig. 1.8 e Fig. 1.9 è mostrato lo stato attuale delle prestazioni sperimentali raggiunte dai propulsori elettrici.
1.5 Il processo accelerativo MPD
I propulsori magneto-plasma-dinamici sono dispositivi che accelerano un plasma da essi generato. Il plasma può essere definito [2] come una miscela di ioni, elettroni e atomi neutri, in cui un generico elemento di volume può essere considerato elettricamente neutro e nel quale una qualunque perturbazione viene schermata entro una lunghezza caratteristica detta
lunghezza di Debye così definita:
2 0 0
q
n
kT
e Dε
λ
=
(1.8)dove no e Te sono rispettivamente densità e temperatura degli elettroni del plasma.
Introducendo nel plasma una carica, questo reagisce schermandola con cariche di segno opposto [2]. La lunghezza massima entro cui sono sensibili gli effetti di non neutralità è appunto la lunghezza di Debye, la quale deve, inoltre, essere minore di una qualunque altra lunghezza caratteristica del sistema per soddisfare il requisito di neutralità macroscopica del sistema stesso.
Il plasma, caratterizzato da una conducibilità σ e da una velocità v, se sottoposto all'azione di un campo magnetico B ed un campo elettrico E, dà luogo ad una corrente:
(
E v B)
j =
σ
⋅ + × (1.9)La corrente elettrica generata interagisce con il campo magnetico generando una forza di volume:
fb= j x B
(1.10)
che accelera la massa del plasma.
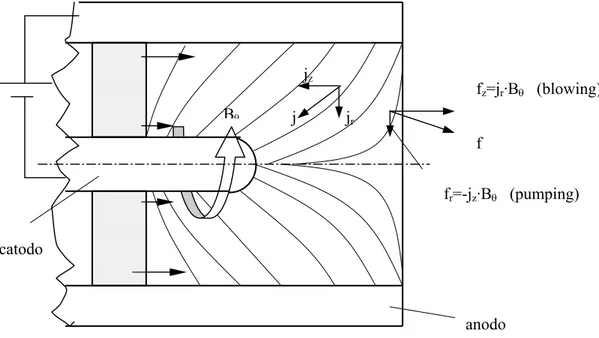
In un propulsore MPD con geometria coassiale degli elettrodi, la semplicità concettuale del processo accelerativo va ad aggiungersi ad una semplicità funzionale intrinseca in quanto i campi elettrico e magnetico necessari e il plasma stesso vengono prodotti semplicemente applicando un’opportuna differenza di potenziale agli elettrodi. In questo caso la corrente, che tende a fluire radialmente, induce un campo magnetico azimutale: il processo accelerativo di Lorentz risulta quindi prodotto dall’interazione tra il plasma, la corrente ed il campo magnetico indotto dalla corrente stessa.
Come mostrato in Fig. 1.10 le linee di corrente tra anodo e catodo non hanno un andamento perfettamente radiale. Pertanto, oltre ad una componente assiale (blowing), effettivamente responsabile della spinta, la forza di campo possiede anche una componente centripeta (pumping) diretta verso l'asse del propulsore e che confina il plasma in un getto cilindrico.
Fig. 1.10 Schema di un propulsore MPD coassiale
fz=jr·Bθ (blowing) fr=-jz·Bθ (pumping) f jz jr j anodo catodo Bθ
In realtà il campo magnetico autoindotto non è perfettamente azimutale, e sono quindi presenti altre componenti di forza non utilizzabili ai fini propulsivi.
Fenomeni di natura elettrotermica e gasdinamica possono concorrere alla generazione della spinta. L'arco elettrico che si instaura tra catodo ed anodo riscalda il propellente che successivamente si espande verso l'esterno del motore. Solamente nelle fasi iniziali di funzionamento, cioè quando il plasma non ha ancora raggiunto la completa ionizzazione, e per regimi di basse correnti, tale componente di spinta risulta significativa. Opportune geometrie dell'anodo possono innalzare questo contributo fino al 30% della spinta totale. La componente gasdinamica si deve, invece, all'iniezione in camera di accelerazione del fluido di lavoro da parte degli iniettori. L'espansione è così esigua che è solitamente trascurabile.
1.5.1 Processi di ionizzazione del gas propellente
La ionizzazione del propellente avviene attraverso processi di diversa natura nell'istante in cui il propellente stesso viene immesso in camera di scarica:
- per urti tra particelle dotate di elevata energia cinetica, durante i quali parte dell’energia in gioco può essere spesa per la ionizzazione di una o entrambe le particelle;
- per azione di un campo elettrico di intensità sufficiente a strappare, per effetto elettrostatico, un elettrone da una particella neutra, ionizzandola.
Altri meccanismi, quali la ionizzazione per trasmissione di energia elettromagnetica sotto forma di fotoni o le interazioni di tipo chimico, vengono giudicati trascurabili nel caso della propulsione MPD.
Una delle ipotesi più accreditate circa il meccanismo di ionizzazione è quella degli elettroni sovratermici di Alfvèn [3], secondo cui detto meccanismo subisce una brusca accelerazione quando la velocità relativa del flusso delle particelle preionizzate rispetto alla parte neutra del gas, raggiunge una valore critico:
(1.11)
La Uac è detta velocità critica di Alfvèn e per l'Argon (uno dei propellenti più utilizzati)
vale 8.7 km/s. La (1.11) scritta in termini di energia diventa:
(1.12)
Una interpretazione semplicistica della (1.12) è quella che si ha ionizzazione quando l'energia cinetica coinvolta nell'urto ione-neutro è tale da eguagliare il valore dell'energia di prima ionizzazione del neutro stesso. Questa interpretazione, tuttavia, non spiega la
a i ac M V U = 2 i ac a
U
V
M
2=
2
1
che la ionizzazione proceda grazie all'interazione tra particelle neutre ed elettroni che si trovano in un particolare stato energetico (elettroni sovratermici) a causa delle accelerazioni impartite loro da campi elettrici locali fluttuanti, dovuti all'instaurarsi di forme d'instabilità elettrostatica nel plasma.
Si può immaginare che un certo numero di particelle cariche siano create, in prossimità delle condizioni critiche, in un processo di ionizzazione iniziale, di non forte intensità. In determinate condizioni il flusso ionico o elettronico, innescando una instabilità detta two
stream instability, che accelera gli elettroni liberi facendo loro raggiungere livelli
energetici molto elevati.
In un propulsore MPD, il campo magnetico azimutale autoindotto, il gas neutro iniettato in camera e gli ioni generati negli urti tra particelle, creano le condizioni per il verificarsi di questo fenomeno.
Le condizioni indicate per l'instaurarsi dell'instabilità sono necessarie ma non sufficienti; occorre che la densità di energia degli elettroni sovratermici e degli ioni sia superiore a certi valori di soglia e che la velocità relativa dell'urto ione-neutro sia all'incirca doppia di
Uac. Questi urti provocano anche la ridistribuzione della quantità di moto, limitando così
la velocità di scarico a valori inferiori ad Uac finché la completa ionizzazione non è stata
raggiunta, solo allora il flusso esce dal propulsore con una velocità pari a Uac.
Una volta raggiunta questa situazione, ogni incremento di potenza erogata al propulsore, si traduce in un incremento, non solo della velocità di scarico, ma anche dei fenomeni di instabilità, di cui si dirà in seguito. Alla condizione di piena ionizzazione corrisponde un valore ben preciso della corrente di scarica, la corrente di piena ionizzazione Ifi, che
costituisce uno dei parametri di funzionamento fondamentali del propulsore. Il parametro:
(1.13)
detto numero di scala di accelerazione elettromagnetica, caratterizza il regime di funzionamento del propulsore [4].
Se ξ<1, la ionizzazione del propellente non è completa; se ξ>1, il propellente è accelerato a velocità di scarico tali che:
(1.14)
Pertanto con regimi di funzionamento caratterizzati da elevati valori di
ξ
, si ottengono impulsi specifici significativi accompagnati, tuttavia, da fenomeni di malfunzionamento dovuti all'instabilità del plasma (onset). In queste condizioni il propulsore presenta un'usura elevata, con conseguente riduzione della vita operativa, una sensibile diminuzione dell'efficienza propulsiva, effetto della natura dissipativa di questi fenomeni. I dati sperimentali reperibili in letteratura, indicano che il campo entro cui un propulsore MPD funziona in regime PQS senza incontrare i problemi cui si è fatto cenno, è caratterizzato da 1<ξ
<1.5. fi I I = ξ ac e U U =ξ
21.6 Prestazioni di un propulsore MPD
Il raggiungimento di livelli di prestazione più elevati di quelli attuali è uno degli obiettivi, come già accennato precedentemente, a cui è legato il successo della propulsione MPD. Occorre quindi individuare opportuni parametri che consentano di caratterizzare le grandezze su cui sarà necessario e/o conveniente agire per il conseguimento di questo obiettivo.
1.6.1 Il modello della spinta
L'espressione generale della spinta può essere sempre posta nella forma:
(1.15)
in cui la Ue è una quantità difficilmente misurabile e poco correlabile con le grandezze
elettriche del propulsore. Nel caso di un motore MPD coassiale a campo magnetico indotto, se si integrano le forze elettromagnetiche di campo, assumendo una certa distribuzione delle linee di corrente e nell'ipotesi di catodo cilindrico di lunghezza infinita, si ottiene:
(1.16)
che è indipendente dalle caratteristiche del fluido.
Se si considera un catodo di lunghezza finita dalla cui estremità, semisferica o conica, si suppone staccarsi la maggior parte delle linee di corrente, la (1.16) si modifica come in:
(1.17)
A parità di corrente e di parametri geometrici ra ed rc, la spinta ottenuta è superiore a
quella che si ottiene con catodo di lunghezza infinita. Si osservi però che le relazioni (1.16) ed (1.17) non dicono nulla sulla potenza necessaria ad ottenere la stessa intensità di corrente per l'una o per l'altra geometria; in definitiva non si può dire quale delle due sia la soluzione più efficiente.
Queste espressioni della spinta per quanto ottenute attraverso un modello semplificato del propulsore trovano una buona conferma sperimentale qualora la si scriva come:
e
U
m
T
=
&
= c a o r r I T log 4 2 π µ + = 4 3 log 4 2 eff c a o r r I T π µ + = µ r ϕL’espressione della spinta si può scrivere come:
(1.19)
con b coefficiente di spinta elettromagnetica, funzione della geometria del propulsore. La relazione di dipendenza quadratica della spinta dalla corrente trova buon accordo con i dati sperimentali.
Nel regime di parziale ionizzazione la spinta evidenzia una dipendenza lineare dalla corrente di scarica. Questa circostanza è in buon accordo con l'ipotesi che la spinta elettromagnetica sia dovuta alla sola componente ionizzata del flusso.
Per correnti inferiori a quella di piena ionizzazione e nella condizione che la ionizzazione stessa del gas propellente avvenga secondo i meccanismi precedentemente descritti, il flusso in uscita possiede una velocità inferiore a quella di Alfvèn e pertanto la spinta può essere espressa come:
(1.20)
dove il parametro β è espresso come:
(1.21)
Per definizione quindi β vale uno per I=Ifi; inoltre, variando la spinta linearmente con la
corrente, si annullerà per I che tende a zero analogamente al parametro ξ. Se ne deduce che:
(1.22)
e per la spinta si ottiene:
(1.23)
Poiché nelle condizioni di piena ionizzazione risulta:
(1.24) Dalle (2.21) e (2.22) si ricava: (1.25) 2 I b T = ac e
m
U
U
m
T
=
&
=
&
β
ac e U U =β
ξ
β
= acU
m
T
=
ξ
&
2I
b
U
m
T
= &
ac=
2 fiI
b
T
=
ξ
Sostituendo la (2.6) nella (2.23) si ha:
(1.26)
Questa relazione evidenzia come in condizioni di parziale ionizzazione del propellente la spinta elettromagnetica vari linearmente con la corrente di scarica in accordo con i dati sperimentali. Per uniformità con la relazione valida nel campo di piena ionizzazione si può esprimere la spinta come:
(1.27)
dove il coefficiente bpi, coefficiente di spinta nel regime di ionizzazione parziale, è
funzione di I e coincide con b per I ≥ Ifi.
1.6.2 L'efficienza di spinta
Per qualunque dispositivo a propulsione elettrica, l'efficienza di spinta è definita come il rapporto tra la potenza fornita in termini di spinta e la potenza elettrica assorbita:
(1.28)
Nel caso del motore MPD, a campo magnetico autoindotto, in condizioni di piena ionizzazione del propellente e trascurando il contributo elettrotermico alla spinta, la (1.26) diviene:
(1.29)
Risulta evidente dalla relazione (1.29) che per aumentare il rendimento si deve aumentare il valore del numeratore, il che vuol dire incrementare il livello di spinta del propulsore, oppure ridurre la caduta di tensione fra gli elettrodi.
Per incrementare il livello di spinta ottenibile bisogna sfruttare adeguatamente il contributo elettrotermico. Ciò significa però incrementare la pressione nella camera di accelerazione per poi sfruttare l'espansione in un ugello opportunamente disegnato; l'aumento di pressione si scontra però con l'esigenza di mantenere adeguati livelli di ionizzazione del gas propellente. I tentativi di recupero dei due contributi di spinta si concretizzano nella realizzazione di motori ibridi Arcogetti-MPD con particolari
fi
I
b
I
T
=
2 I b T = piI
V
U
m
e22
&
=
η
V
m
I
b
&
2
3 2=
η
geometrie, che tuttavia danno buoni risultati per valori di potenza in ingresso non superiori a 100 kW.
Il denominatore della (1.28) può essere ridotto cercando di comprendere i fenomeni dissipativi che governano il plasma, riducendo le aliquote di energia dissipate nelle turbolenze interne ed i fenomeni che ne incrementano la resistività. La caduta di tensione può essere sostituita con una espressione derivata dalla considerazione che la potenza in ingresso viene spesa, parte in accelerazione utile, parte in riscaldamento resistivo del plasma:
(1.30)
Introducendo al secondo membro l'espressione che fornisce la spinta in funzione del quadrato della corrente e dividendo ambo i membri per I, si ottiene:
(1.31)
Per esplicitare il termine legato all'impedenza del propulsore, si considera un modello in cui la caduta di tensione è data dalla somma di due contributi: uno dovuto alla potenza impiegata nel riscaldamento del getto; l'altro al lavoro compiuto dalla forza elettromotrice. L'espressione di V ottenuta con tale modello è:
(1.32)
Per migliorare il rendimento occorre quindi dominare i termini contenuti nell'integrale e quindi comprendere i meccanismi di dissipazione che caratterizzano il plasma.
1.6.3 La caratteristica elettrica
Per un qualsiasi dispositivo elettrico, si può tracciare il grafico della funzione V = f(I) che prende il nome di caratteristica elettrica. Nel caso di un propulsore MPD, la caratteristica elettrica fornisce importanti indicazioni qualitative sul modo di operare del motore e consente di trarre importanti informazioni relative alle prestazioni, sfruttando altri parametri fondamentali ricavati per propulsori simili. Si consideri, ad esempio, che il parametro b ha valori costanti per propulsori geometricamente simili, pertanto dalla conoscenza delle coppie di valori (I,V), nota la portata del propellente, si può ottenere direttamente una stima del rendimento propulsivo:
(1.33) 2 2
2
1
eU
m
I
z
I
V
=
+
&
m
I
b
I
z
V
&
2
3 2+
=
∫
+
=
m
I
b
dV
J
I
V
&
2
1
2 2 3σ
V
m
I
b
V
I
U
m
e&
&
2
2
2 3 2=
=
η
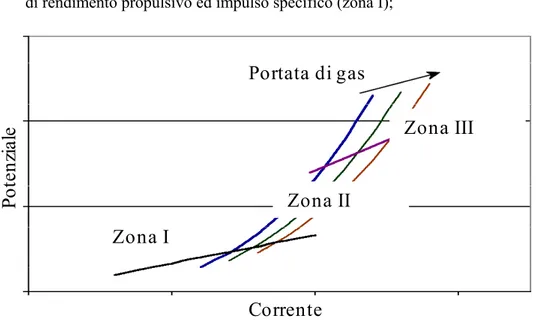
L’analisi di una qualsiasi caratteristica elettrica tracciata per un propulsore MPD operante con propellente gassoso, portate costanti e regime pulsato quasi stazionario, mostra un andamento del tipo riportato in Fig. 1.11, sul quale si possono facilmente distinguere tre zone caratteristiche di funzionamento:
- per correnti inferiori a Ifi si ha un andamento lineare caratterizzato da bassi valori
di rendimento propulsivo ed impulso specifico (zona I);
Portata di gas
Po
te
nz
ia
le
Corrente
Zona I
Zona II
Zona III
Fig. 1.11 Andamento schematico della caratteristica elettrica di un propulsore MPD
- per correnti superiori a Ifi l'andamento prevalente è cubico: rendimento ed impulso
specifico aumentano (zona II);
- per correnti molto maggiori di Ifi, superato il valore di I*, si hanno fenomeni
erosivi molto intensi, fluttuazioni nel voltaggio terminale fra gli elettrodi e l'andamento ritorna quasi lineare (zona III).
L'andamento evidenziato dai tre segmenti di retta può essere spiegato con considerazioni basate sulla potenza utile impiegata nel getto.
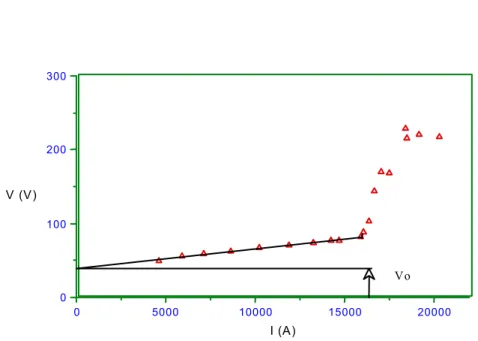
La Fig. 1.12 [4] mostra la caratteristica elettrica per un propulsore operante con una portata di 8 g/s, che può essere espressa dalle due leggi:
a. Regime di parziale ionizzazione (zona I): V=Vo+c1I
Fig. 1.12 Caratteristica elettrica
Il termine Vo corrisponde alla caduta di potenziale (assunta costante) che si ha in corrispondenza degli sheaths elettrodici. Nel termine c1I sono comprese, in primo luogo,
cadute di tensione nelle regioni elettrodiche variabili con la corrente ed aventi varia natura (resistiva, resistiva anomala, ecc…) mentre il termine c2I3 rappresenta la forza
controelettromotrice, derivante dalla spinta.
Il termine c1I dipende quindi dall'impedenza del propulsore, ma anche dalla caduta di
tensione dovuta alla potenza utile, cioè quella convertita in spinta:
(1.34)
Dal meccanismo di ionizzazione di Alfvèn, in condizioni di parziale ionizzazione, si può assumere :
(1.35)
che esplicita la condizione per cui l'intera portata viene espulsa ad una velocità inferiore a quella critica di Alfvèn.
Al raggiungimento delle condizioni di piena ionizzazione, per I=Ifi, vale la relazione: (1.36)
La potenza utile può quindi essere espressa come:
2
2
1
eU
m
I
V
P
=
=
&
ac em
U
U
m
&
=
ξ
&
2 fi ac bI U m T = & = 0 5000 10000 15000 20000 0 100 200 300 I (A) V (V) Vo(1.37) da cui:
(1.38)
L'andamento lineare del tratto della caratteristica elettrica può quindi essere giustificato da queste considerazioni dedotte dall'espressione della potenza utile a fini propulsivi. Il tratto di caratteristica distinto da un andamento cubico della caduta di tensione in funzione della corrente è quello che si riconduce alle condizioni di propellente completamente ionizzato: ciò può essere dimostrato considerando ancora l'espressione della potenza impiegata nell'accelerazione del flusso espressa dalla (1.35) che, nell'ipotesi di flusso completamente ionizzato, può essere modificata con l'introduzione della idonea espressione della spinta ottenendo così, per il coefficiente c2, il valore:
(1.39)
che rende conto del termine cubico della curva di interpolazione dei dati ottenuti sperimentalmente.
La corrente corrispondente al punto di variazione della pendenza, detto punto di ginocchio della caratteristica elettrica, viene quindi riconosciuta come quella per la quale si ha il raggiungimento delle condizioni di piena ionizzazione del propellente, Ifi.
1.6.4 La caratteristica elettrica adimensionale
Le caratteristiche elettriche tracciate per uno stesso propulsore, operante in regime PQS, per differenti valori di portata, presentano una sostanziale coincidenza delle pendenze dei vari tratti caratteristici prima indicati. La differenza evidente è nel prolungamento del tratto lineare al crescere del valore di portata, imputabile alla maggiore potenza necessaria alla completa ionizzazione del flusso.
La legge con cui varia la corrente di completa ionizzazione al variare della portata è esprimibile dalla relazione:
(1.40)
dove κfi (fattore di carico di massa) è una costante dipendente dalla geometria del propulsore e dal tipo di gas impiegato. La conoscenza di tale parametro è importante per avere informazioni immediate sulle condizioni di piena ionizzazione al variare del valore della portata.
Dividendo i valori di corrente per la corrente di piena ionizzazione ed i valori di tensione per la tensione corrispondente alla corrente di piena ionizzazione, si ottengono grafici
ac ac fi fi
U
I
b
U
I
b
I
I
P
2 2 2 22
1
2
1
=
=
I
U
b
V
ac2
1
=
m
I
b
V
&
2
3 2=
m I k 2 fi fi & =che ne risulta prende il nome di "caratteristica elettrica adimensionale", e la sua utilità è evidente quando si consideri che, nota essa, per la conoscenza della caratteristica elettrica per un determinato valore di portata è sufficiente conoscere i corrispondenti valori di Ifi
Vfi. Nella Fig. 1.13 sono riportate, a titolo di esempio, le caratteristiche elettriche misurate
per alcuni valori di portata per uno dei propulsori in studio al Centrospazio. Nella Fig. 1.14 è invece riportata la caratteristica elettrica adimensionale, ottenuta da quella di Fig. 1.13 nel modo anzidetto.
0 5000 10000 15000 20000 0 100 200 300 400 500 2g/s 4g/s 8g/s 1A5CAC I (A) V (V)
Fig. 1.13 Caratteristica elettrica per portate di 2-8 g/s [3]
0,0 0,5 1,0 1,5 2,0 0 1 2 3 4 5 6 2g/s 4g/s 8g/s 1A5CAC ξ φ
Fig. 1.14 Caratteristica elettrica adimensionale [3]
1.7 Classificazione dei propulsori MPD
Una delle possibili classificazioni che possono essere adottate per i propulsori MPD è quella basata sul loro modo di operare in regime stazionario o pulsato. Sono già state
riportate precedentemente alcune importanti conseguenze della differenza tra i due modi di funzionamento. Qui di seguito si vogliono precisare le differenze costruttive ed operative dei due differenti sistemi.
1.7.1 Propulsori MPD stazionari
I propulsori MPD stazionari sono caratterizzati da un funzionamento continuo durante il quale le grandezze in gioco (portata di massa, intensità di corrente, spinta) assumono un valore stazionario. Per questo motivo non sono necessari dispositivi di accumulo di energia e valvole rapide di immissione del propellente e ciò rende questi apparati i più semplici dal punto di vista costruttivo e del funzionamento fra tutti i propulsori MPD. L'impiego nelle applicazioni spaziali dei propulsori MPD stazionari è attualmente limitato da tre fattori:
per avere spinte significative (50N) sono necessarie potenze dell'ordine dei MW, attualmente non disponibili nello spazio con i tradizionali generatori fotovoltaici;
i livelli di efficienza propulsiva effettivamente sperimentati (∼30%) non li rende un'alternativa valida ad altri sistemi propulsivi;
il funzionamento con continuità ai livelli di potenza indicati è causa di fenomeni di erosione elettrodica che, sebbene meno severi di quelli che si hanno nel caso di propulsori operanti in regime pulsato, limitano la vita utile di tali apparati a tempi con non sono comparabili con le durate previste delle missioni per le quali dovrebbero essere utilizzati. Se in futuro saranno disponibili generatori di potenza adeguati e verranno risolti i problemi connessi con la tecnologia dei materiali impiegati per la realizzazione degli elettrodi e dell'isolante, in modo da ridurre i fenomeni erosivi, sarà possibile adottare tali propulsori per missioni di notevole impegno e durata (ad esempio missioni di trasferimento interplanetario di grossi veicoli).
1.7.2 Propulsori MPD pulsati
I propulsori MPD pulsati (regime PQS) sono caratterizzati da un funzionamento discontinuo: gli impulsi di corrente sono realizzati tramite la scarica di apposite reti generatrici. Durante l'impulso, la cui durata è tipicamente intorno al millisecondo, si realizzano, dopo un breve transitorio (10÷100µs), condizioni praticamente stazionarie di funzionamento. La fase attiva è seguita da una fase di riposo necessaria per l'accumulo di energia elettrica resa ad alta potenza nell'impulso successivo.
L'utilizzazione del modo pulsato consente di:
- ottenere alte potenze istantanee utilizzando sorgenti di energia a bassa potenza (pannelli solari);
- avere carichi termici ridotti, sebbene ciò non si traduca in bassi tassi di erosione dei materiali impiegati per la realizzazione degli elettrodi.
Inoltre è possibile variare l'impulso globale fornito in un certo tempo modificando la frequenza degli impulsi, senza per questo alterare la velocità di scarico e il rendimento
propulsivo. La possibilità di generare piccoli, precisi e riproducibili impulsi propulsivi rende questo sistema interessante per il controllo orbitale e di assetto dei satelliti.
I motori MPD pulsati possono essere alimentati con propellenti gassosi o solidi. Nel primo caso è necessario impiegare una valvola rapida che realizzi tempi di apertura opportuni; nel secondo caso la superficie di un solido, generalmente un polimero, viene fatta attraversare da una scarica elettrica di alta intensità che, trasferendo energia la solido stesso, provvede a depolimerizzarlo. Il propellente, così vaporizzato e ionizzato, viene accelerato in un condotto. Questa soluzione non necessita di valvole, di linee di alimentazione e di serbatoi esterni per il propellente. Varie esperienze hanno portato al raggiungimento di impulsi specifici intorno ai 3000s (alimentazione gassosa) con rendimenti intorno al 30%.
Propulsori MPD pulsati vengono utilizzati in laboratorio per la simulazione del funzionamento stazionario. Questi infatti offrono una maggiore accessibilità nell'esecuzione di misure (minori problemi termici per apparecchiature di diagnostica di tipo intrusivo), per il fatto che possono essere fatti funzionare con potenze istantanee di qualche MW, livelli generalmente inaccessibili in modo continuativo con le normali dotazioni di laboratorio, e poiché consentono la sperimentazione con alte portate di propellente che non potrebbero essere smaltite dagli impianti a vuoto se prodotte in modo continuo, a meno di disporre di sistemi di pompaggio di dimensioni spropositate.
Volendo tracciare un breve quadro delle caratteristiche di questi apparati, si può dire che la potenza istantanea può talvolta raggiungere la decina di MW, disponendo di potenze medie continue dell'ordine del kW; l'intensità di corrente assume valori compresi fra i 10kA e i 50kA; la tensione tra i 100V e i 500V e l'impedenza d'arco può variare tra i 5mΩ e i 10mΩ. Un propulsore MPD pulsato presenta, rispetto ad un sistema finalizzato al funzionamento continuo, alcune componenti aggiuntive, che sono indicate nella Fig. 1.15:
- sistema di accumulo di energia e rete generatrice di impulsi (Pulse Forming Network o PFN), che deve essere in grado di accumulare cospicui quantitativi di energia e di rilasciarla istantaneamente generando un impulso di forma opportuna (rettangolare nel caso pulsato quasi stazionario);
- sistema di controllo della potenza (Power Control Unit o CPU), che deve interfacciare la PFN ed il generatore di potenza;
- sistema di alimentazione del propellente, sincronizzato con l’impulso elettrico, di cui fa parte anche una valvola rapida (Fast Acting Valve o FAV).
Il funzionamento pulsato, se finalizzato alla riproduzione delle condizioni di funzionamento dello stato stazionario, richiede una precisa correlazione fra l'impulso di massa iniettato e l’impulso di corrente applicato [5]: in altre parole il propulsore funziona correttamente solo se la pressione nella regione di scarica raggiunge un valore stazionario tale da far innescare l'arco elettrico e se la durata di immissione del propellente è almeno uguale a quella della scarica interelettrodica.
Per capire quanto tutto ciò possa essere difficilmente ottenibile si faccia riferimento ai diagrammi della Fig. 1.16.
Il flusso di massa iniettato nella camera di accelerazione deve salire in un tempo To fino
ad un valore che deve essere mantenuto finché l'impulso di corrente non si sarà esaurito, tempo Tm. L'impulso di corrente inizia quando la pressione nella camera ha raggiunto un
valore corrispondente al funzionamento in regime stazionario, tempo Ta. Pertanto con un
appropriato ritardo Td, l'impulso di corrente può rapidamente salire, tempo Tr, fino ad un
valore costante e durare per un tempo Tl, caratteristico della sorgente di energia che lo
alimenta.
Prima che l'arco di scarica possa considerarsi in una fase effettivamente stazionaria, la pressione nella camera di accelerazione deve riassestarsi, tempo Tf, sul suo maggior
valore stabile e la densità di corrente nel flusso deve raggiungere, tempo Ts, un valore
pressoché costante. Se tutti questi tempi sono di grandezza appropriata ed opportunamente sincronizzati, allora rimane un certo intervallo di tempo Tq, durante il
Fig. 1.16 Sequenza dei tempi caratteristici in un propulsore MPD pulsato t Tl Tr Td Ts Tq I m& t Tm To t p Ta Tf
1.7.3 Fenomeni di malfunzionamento
Per una data portata di propellente e per valori superiori a una certa corrente I*, un propulsore MPD manifesta fenomeni di malfunzionamento, detti di "onset", che sono evidenziati dalla presenza di fluttuazioni nel segnale della caduta di tensione tra gli elettrodi, con frequenza per l'argon di 100÷400kHz.
Convenzionalmente si assume che il propulsore entri in condizioni di malfunzionamento quando le oscillazioni nel voltaggio terminale raggiungono il 10% del valore medio del segnale.
L'aspetto più deleterio legato all'onset è un brusco incremento dell'erosione dei componenti della camera di accelerazione, in particolar modo dell'anodo e dell'isolante interposto fra gli elettrodi.
La sperimentazione ha messo in evidenza la seguente correlazione tra I* e la portata di propellente:
(1.41)
con κ* dipendente dalla geometria del propulsore e dal tipo di propellente impiegato. Dalla (1.41) si può concludere che l’onset è un fenomeno limitante dell'impulso specifico ottenibile con un dato propulsore. Riprendendo l'espressione (1.3) ed introducendo l'espressione che lega la spinta la quadrato della corrente di funzionamento si ottiene infatti:
(1.42)
in cui b è dipendente dalla geometria del propulsore ed il parametro κ*, che compare, non può salire oltre un certo limite, pena una erosione distruttiva del propulsore.
1.8 Utilizzo dei catodi cavi multicanale in propulsori MPD
La necessità di controllare e migliorare il comportamento erosivo dei catodi utilizzati nei propulsori magneto-plasma-dinamici è di fondamentale importanza per un incremento sostanziale della vita operativa di questi ultimi. I catodi cavi multicanale costituiscono il metodo più semplice ottenere un miglioramento delle prestazioni di questi dispositivi.
In particolare, americani e russi [8], [9] hanno sviluppato propulsori MPD che, oltre all’impiego dei catodi multicanale, usano come propellente il Litio, aumentando significativamente la vita operativa del motore.
Questo incremento è dovuto al ruolo del Litio nell’abbassamento della funzione di lavoro
m
I
&
2*
*
=
κ
o o Sg
m
I
b
g
m
T
I
&
&
2=
=
della configurazione multicanale nel diminuire le densità di corrente, rendendo possibili temperature di parete più basse per una data corrente e quindi riducendo l’erosione. E’ noto inoltre [10] che un altro vantaggio dell’uso di metalli alcalini come propellente è la maggiore efficienza di spinta, che supera valori del 60%. L’impiego di Litio complica notevolmente il sistema di alimentazione del propellente. Promettente è il sistema di alimentazione concepito al RIAME del Moscow Aviation Institute [11] riportato in Fig. 1.17 che si basa su un sistema
Fig. 1.17 Schema del sistema di alimentazione del Litio usato al RIAME-MAI
meccanico con due freezing valves che facendo solidificare il litio ne impediscono il riflusso nel serbatoio. In Fig. 1.18 si può vedere il catodo multicanale in funzione al RIAME.
Un problema che è stato studiato nel 1990 durante un esperimento sulla navetta sovietica Progress M-4, è quello della contaminazione da Litio [12]. Questo studio ha dimostrato, anche attraverso risultati numerici, che la deposizione di metalli alcalini sul veicolo spaziale non rappresenta un ostacolo per il loro impiego come propellenti per propulsori elettrici.
RIFERIMENTI
[1] Jahn, R.G., “Physics of Electric Propulsion”, McGraw-Hill Company, New York, 1968.
[2] Bittencourt J.A., “Fundamentals of Plasma Physics”, Pergamon Press, 1986.
[3] Choueiri E.Y., Kelly A.J., Jahn R.G., “The Manifestation of Alfvèn Hypothesis of
Critical Ionisation Velocity in the Performance of MPD Thrusters”, AIAA-85-2037,
18th International Electric Propulsion Conference, Alexandra, Virginia, September, 1985.
[4] Grazzini P., Pupilli F., “Effetti di Geometria e di Scala in Propulsori MPD”, Tesi di Laurea in Ingegneria Aeronautica, Università di Pisa, 1992.
[5] Schianchi G., “Studio Teorico Sperimentale dell'Alimentazione Gassosa in una
Famiglia di Propulsori MPD”, Tesi di Laurea in Ingegneria Aeronautica, Università
di Pisa, 1991.
[6] Oberth R.C., Jahn R.G., “Anode Phenomena in High-Current Accelerators”, AIAA Journal, January, 1972.
[7] Williams D.W. and Williams W.T., “Field-emitted Current Necessary for
Cathode-initiated Vacuum Breakdown”, J. Phys. D., Appl. Phys., Vol. 5, 1972.
[8] Choueiri E.Y., Chiravalle V., Miller E., Jahn R.G., Anderson W. and Bland J., “Lorentz Force Accelerator with an Open-ended Lithium Heat Pipe”, AIAA-96-2737.
[9] Kim V., Tikhonov V. and Semenikhin S., “The Third Quarterly Report on the Stages
##3”B” of the Contract on the Research Studies No NASW-4851 Between RIAME MAI and NASA”, Moscow, December, 1996
[10] Polk J.E. and Pivirotto T.J., “Alkali Metal Propellants for MPD Thrusters”, AIAA-91-3572, AIAA/NASA/OAI Conf. On Advanced SEI Technologies, Cleveland, Ohio, 1995.
[11] Kodys A.D., Emsellem G., Cassady L.D., Polk J.E. and Choueiri E.Y., “Lithium
[12] Brukhty V.I., Shutov V.N., Smirnov A.B., Burgasov M.P. and Chirov A.A., “The
Effect of Alkali Metal Electric Rocket Engines on Spacecraft”, IEPC-93-149, 23rd