Capitolo 5 - Analisi magnetica
5.1 Influenza del campo magnetico
Il campo magnetico rappresenta il parametro più importante nella progettazione di un propulsore Hall, in quanto ha un ruolo fondamentale per lo sviluppo dei fenomeni responsabili della produzione della spinta: agisce direttamente sulle traiettorie degli elettroni e degli ioni che si muovono all’interno del canale del motore.
5.1.1 Requisiti per il campo magnetico
Come già accennato, uno dei principi fondamentali sui quali si basa il funzionamento di un propulsore ad effetto Hall è che gli elettroni risentano dell’influenza del campo magnetico generato, mentre la sua influenza sugli ioni sia praticamente trascurabile. Il raggio di Larmor risulta inversamente proporzionale al campo magnetico e quindi per un corretto funzionamento del propulsore dobbiamo garantire che la larghezza del canale di accelerazione sia molto più grande del raggio di Larmor degli elettroni e più piccola di quello degli ioni: questo consente di vincolare gli elettroni nella zona del canale dove il campo magnetico è più intenso, conferendo alle particelle un moto azimutale, e allo stesso tempo impedisce la loro collisione con le pareti, mentre permette agli ioni di essere accelerati dal campo elettrico in maniera pressoché rettilinea dentro il propulsore, senza che il campo magnetico ne influenzi in modo significativo la traiettoria.
Queste condizioni si traducono nelle relazioni:
( )
b eB v m r e elettroni L = << ⊥ (5.1)( )
b eB v m r i ioni L = >> ⊥ (5.2)possiamo scegliere l’intensità del campo tale da rispettare i vincoli sopra riportati. Approssimando la velocità v⊥ degli elettroni con quella termica media:
⊥ ≈ = v m kT c e e e
π
8 (5.3) dove: • k = costante di Boltzmann • m = massa dell’elettrone e • T = temperatura elettronica eil raggio di Larmor risulta dipendente solo dalla temperatura T e dall’intensità di B : e
( )
B T
rL elettroni ∝ e (5.4) Poiché il raggio elettronico di Larmor dipende soltanto dalla forza del campo magnetico e dalla temperatura degli elettroni, allora l’equazione (5.1) può essere soddisfatta in un ampio intervallo di temperature elettroniche con piccole variazioni del valore del campo magnetico.
Inoltre, per il funzionamento del motore, è molto importante anche la topografia delle linee di flusso del campo magnetico nel canale di accelerazione. Vari studi [21,22,23] hanno scoperto che le caratteristiche di scarica dipendono essenzialmente da come la componente radiale del campo magnetico varia in direzione assiale e che, per evitare delle instabilità di flusso, si deve avere:
0 >
∇zBr (5.5)
La relazione (4.5) deriva da studi teorici [21] e serve a smorzare le fluttuazioni di densità degli elettroni causate dall’attrito tra le varie parti della nuvola elettronica. le quali si muovono con velocità angolari diverse. Tali fluttuazioni sono conosciute come
onde magnetofoniche di deriva [24].
Da questi studi si è scoperto che con voltaggi di scarica costanti e con un andamento della componente radiale del campo magnetico che rispetti la (4.5), il rapporto tra la corrente di ioni e quella di elettroni è approssimativamente il 90%, mentre con un
gradiente relativamente piccolo o nullo il rapporto delle correnti è circa del 60%. Infine, dove il gradiente del campo magnetico è negativo, sono stati trovati rapporti delle correnti ioniche di scarica minori del 50%. Per queste ragioni è importante che lungo il canale di accelerazione il gradiente del campo magnetico sia positivo per massimizzare le prestazioni del propulsore. A causa di ciò il valore massimo del campo magnetico
max
B deve essere vicino al piano d’uscita del propulsore.
Un’altra caratteristica importante, legata alla topografia del campo magnetico, è la necessità di avere all’interno del canale di accelerazione le linee di flusso convesse verso l’anodo. Questa scelta progettuale consente la repulsione degli elettroni dalle pareti, diminuendo così le perdite energetiche. Infatti la legge di Ohm generalizzata asserisce che: ¸ ¹ · ¨ © § × ⋅ − ∇ ⋅ + × + = j B e n p e n B u E j σ i 1 e 1 (5.6)
manipolandola si arriva a trovare che nelle condizioni di funzionamento del propulsore ad effetto Hall vale la relazione
0 1 * ≈ ⋅ ¸ ¹ · ¨ © § ∇ ⋅ + = ⋅ p B e n E B E e (5.7)
La (4.7) ci porta a dire che lungo una linea di forza del campo magnetico si ha la seguente proprietà ds dp e n ds d e ⋅ = 1 φ (5.8) Poiché pe =nKTe arriviamo a definire il potenziale termalizzato
φ
T come:¸¸ ¹ · ¨¨ © § − = 0 ln e e e T n n e KT
φ
φ
(5.9)che rimane costante sulle linee di forza magnetiche. Questo significa che, a meno di un fattore KTe e, le linee di forza magnetiche corrispondono alle linee equipotenziali; dunque, laddove la temperatura elettronica è bassa, gli ioni vengono accelerati in direzione ortogonale alle linee di flusso magnetico.
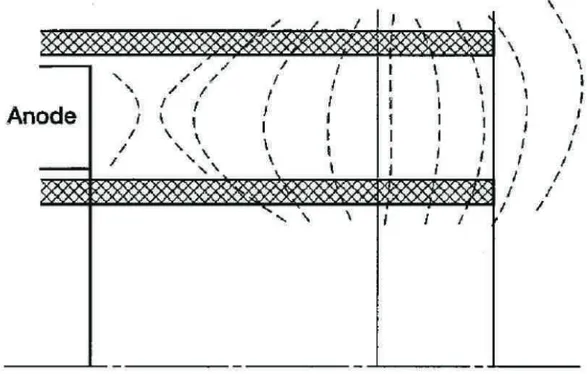
Un’ulteriore caratteristica legata alla topografia delle linee di flusso molto importante per il rendimento del propulsore è il grado di simmetria che le stesse hanno all’interno del canale. Infatti si è scoperto [25] che, per avere un funzionamento ottimale del propulsore, è opportuno ottenere una configurazione delle linee di flusso simmetrica rispetto alla linea centrale della camera di accelerazione (fig. 5.1): tale disposizione crea
Figura 5.1 - Topologia ottimale delle linee di campo magnetico
Infine si deve tenere in considerazione la direzione del getto di plasma, sarebbe infatti consigliabile che il getto rimanesse il più possibile parallelo alla linea media del canale, e non si concentrasse verso l’asse di simmetria del propulsore.
5.2 Materiali ferromagnetici
Il circuito magnetico di un propulsore a effetto Hall è costituito da tutti gli elementi di materiale ferromagnetico, presenti nel propulsore, al cui interno scorre un flusso di campo magnetico indotto da una o più bobine, attraverso il passaggio di una corrente elettrica. Le particolari caratteristiche che questa categoria di materiali esibisce, li rende la scelta ideale per la realizzazione del circuito magnetico.
I materiali vengono classificati in base alla loro risposta all’applicazione di un campo magnetico esterno. Nei materiali paramagnetici i dipoli magnetici a livello atomico si allineano con il campo magnetico applicato, venendone debolmente attratti.
Diversamente nei materiali diamagnetici sono caratterizzati da una magnetizzazione che ha verso opposto rispetto al campo magnetico applicato, e quindi risultano debolmente
"respinti” (in ambito non scientifico i materiali diamagnetici sono spesso semplicemente detti "non magnetici").
Infine ci sono i materiali ferromagnetici che hanno la caratteristica di magnetizzarsi molto intensamente sotto l'azione di un campo magnetico esterno e in alcuni casi possono anche restare magnetizzati quando il campo si annulla.
La caratteristica principale che distingue le varie categorie di materiali è la permeabilità magnetica, una grandezza fisica che esprime appunto l'attitudine del materiale a
magnetizzarsi in presenza di un campo magnetico ed è definita come
H B
r =
=µ µ
µ 0 (5.10)
dove µ0 rappresenta la permeabilità magnetica del vuoto,
µ
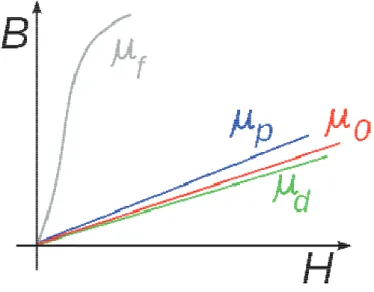
r permeabilità relativa del materiale considerato, B il campo magnetico e H il vettore induzione magneticaNei materiali ferromagnetici (µf ) la permeabilità magnetica relativa del materiale non è costante al variare dei campi, come invece avviene nei materiali diamagnetici (µd) e nei materiali paramagnetici (µp) (fig 5.2): la relazione tra il campo di induzione magnetica ed il campo magnetico non è quindi lineare.
Figura 5.2 - Andamento qualitativo della permeabilità magnetica per materiali
Dal grafico si nota immediatamente l’elevato valore della permeabilità magnetica dei materiali ferromagnetici rispetto alle altre tipologie di materiale.
Proprio questa caratteristica dei materiali ferromagnetici risulta fondamentale nei propulsori ad effetto Hall, in quanto permette al flusso del campo magnetico, indotto
Figura 5.3 - Schema di base di circuito magnetico
Questo consente di poter controllare in maniera relativamente semplice l’andamento delle linee di campo magnetico all’interno del propulsore e fare in modo che si possano soddisfare i requisiti necessari per avere un’efficace azione sulle particelle del propellente, in modo da ottenere le prestazioni desiderate.
5.2.1 Saturazione e influenza della temperatura per i materiali ferromagnetici
Anche in assenza del campo magnetico esterno i dipoli all’interno del materiale si raggruppano in “domini” orientati. All’applicazione del campo esterno i domini si allineano producendo una forte magnetizzazione netta (fig 5.4).
I domini si ridispongono in modo casuale quando il campo esterno viene rimosso nei materiali ferromagnetici di tipo “morbido” (come il ferro), mentre l’orientamento persiste nei materiali di tipo “duro”.
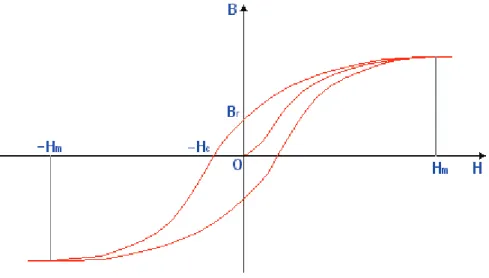
Il particolare andamento del campo magnetico in funzione del vettore di induzione magnetica per i materiali ferromagnetici e riportato di seguito (fig 5.4): a partire dal momento in cui i campi sono nulli, e quindi è nulla la magnetizzazione del materiale, il campo magnetico aumenta seguendo la curva OH , che viene detta curva di prima m magnetizzazione, fino al valore massimo di H . A questo punto, quando tutti i domini m
all’interno del materiale sono orientati secondo il campo applicato, il materiale ha raggiunto il punto di saturazione.
Figura 5.5 - Ciclo di isteresi per i materiali ferromagnetici
Una volta che il materiale è giunto a saturazione, anche se non viene più applicato un campo magnetico esterno, i domini rimangono allineati ed il materiale presenta una magnetizzazione residua (Br). Per annullare questo effetto ed arrivare ad una magnetizzazione nulla è necessario imporre un campo magnetico di segno opposto a quello di partenza: H deve raggiungere un valore negativo, detto valore di coercizione
(H ). Il fenomeno prende il nome di isteresi magnetica. c
Le proprietà magnetiche di un materiale descritte dipendono da molti fattori, ma quello di maggior interesse in questa trattazione è la temperatura.
Al di sopra di una certa temperatura infatti i domini magnetici all’interno del materiale tendono a perdere l’allineamento con il campo magnetico applicato ed a disporsi in
il flusso specifico massimo ammissibile è all’incirca 1,6 Tesla, mentre la temperatura di Curie è di circa 770°C.
Nell’analisi che verrà portata avanti in questo capitolo, la saturazione sarà presa in considerazione, e quindi si cercherà di evitare che si presenti, solo quando si presenterà in forma diffusa all’interno di uno o più componenti che compongono il circuito. I picchi localizzati per il flusso magnetico che si presentano in corrispondenza degli spigoli presenti nel disegno, sono inevitabili e non rappresentano un motivo di preoccupazione ai fini del corretto funzionamento del circuito magnetico e saranno quindi ignorati.
5.3 - Disegno del circuito magnetico
Per il disegno preliminare del circuito magnetico si è fatto riferimento ad una configurazione di base, illustrata di seguito (fig 5.6).
I principali elementi che generalmente lo costituiscono sono:
• i poli magnetici interno ed esterno, attorno ai quali vengono avvolte le bobine; • le espansioni polari, le quali provvedono a creare un traferro corrispondente alla
bocca d’uscita del canale;
• il basamento, che provvede a chiudere il circuito nella parte posteriore del motore ed ha solitamente anche funzione strutturale;
• gli scudi magnetici che servono a incanalare le linee di campo magnetico che altrimenti scorrerebbero nella zona dell’anodo;
Gli elementi che formano il circuito magnetico hanno una simmetria cilindrica e circondano il canale ceramico di accelerazione.
Figura 5.6 - Schema di un tipico circuito magnetico
Data la natura preliminare dell’analisi svolta, si è cercato di conferire ad ogni elemento del circuito una geometria relativamente semplice, in modo che la realizzazione di ogni componente risulti poco costosa, e di rendere ogni elemento il più leggero possibile.
Poli magnetici
La geometria assialsimmetrica degli avvolgimenti esclude la possibilità di utilizzare una soluzione che si basa sull’utilizzo di più poli, separati fra loro, ognuno avvolto da una bobina. Questo schema non presenta una simmetria assiale, ma le linee di campo si distribuiscono all’interno del materiale ferromagnetico costituente l’espansione polare esterna, generando un campo con ottima approssimazione assialsimmetrico all’interno del traferro. Un’immagine di questo tipo di soluzione è rappresentata dal motore SPT-100 utilizzato come riferimento per la scalatura (fig. 2.6). Questo tipo di configurazione è inoltre poco consigliabile a causa delle dimensioni elevate del propulsore da realizzare, in quanto comporterebbe un aumento ulteriore degli ingombri.
I polo magnetici presentano, come conseguenza della limitazione imposta, una configurazione assialsimmetrica continua che circonda completamente le bobine del propulsore: per evitare un peso eccessivo dei componenti, e anche per consentire un maggiore smaltimento dei carichi termici, si sono ipotizzate delle aperture, o finestre, in entrambi i poli, realizzabili mediante taglio laser (fig 5.7).
Figura 5.7 - Poli del circuito magnetico
Per effettuare il fissaggio dei poli con il basamento e con le espansioni polari si sono prese in considerazioni due possibili soluzioni: poli con uno spessore più elevato in modo da permettere la presenza di fori filettati al proprio interno per permettere il collegamento con gli altri componenti (fig 5.8), oppure poli con spessori ridotti ma che presentano “orecchie” sporgenti che permettono il fissaggio tramite viti (fig 5.9).
Figura 5.8 - Polo con spessore costante
Data la maggior facilità di realizzazione si è optato per la prima soluzione con fori interni al materiale, mentre la seconda soluzione, migliore dal punto di vista del peso (circa il 50 % in meno), ma più complessa nella realizzazione, potrebbe rappresentare una possibile ottimizzazione successiva.
Espansioni polari
Per le espansioni polari, la prima soluzione presa in considerazione è stata quella di realizzarle di pezzo con i rispettivi poli magnetici (fig 5.10): tale configurazione presenta, però, una notevole difficoltà realizzativa a causa degli spessori ridotti dei componenti e della profondità della lavorazione necessaria per ottenerli.
Figura 5.10 - Polo ed espansione (esterni) come unico componente
Si è quindi pensato di utilizzare delle espansioni polari smontabili, costituite da anelli metallici e collegate ai poli tramite piccole viti. Questa configurazione consentirebbe una rimozione frontale delle bobine, in caso di guasti o sostituzioni di componenti, senza dover smontare altre parti del propulsore, semplificando e velocizzando le operazioni di manutenzione (fig 5.11).
Sarebbe possibile, inoltre, la sostituzione delle espansioni stesse con versioni successive che presentano geometrie modificate e ottimizzate per avere prestazioni migliori o correggere eventuali difetti nella geometria del campo magnetico che si potrebbero presentare una volta realizzato e testato il propulsore.
Figura 5.11 - Polo ed espansione (esterni) come componenti separati
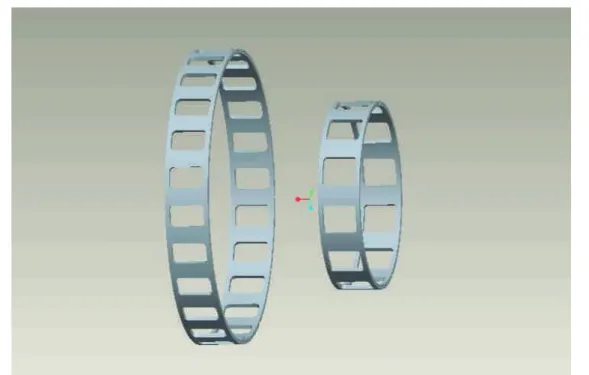
Schermi magnetici
Gli schermi magnetici possono essere realizzati come pezzo unico con la piastra di base oppure essere prodotti separatamente e poi assemblati. La prima soluzione risulta più vantaggiosa nel caso di piccole dimensioni longitudinali del propulsore, in quanto la lavorazione alla macchina utensile risulta relativamente semplice.
Nel caso in esame, la dimensione elevata del canale di accelerazione ha portato alla scelta di una realizzazione separata per schemi magnetici e piastra di base. Questa soluzione rende il prototipo più facilmente modificabile, visto che si può intervenire facilmente nella sostituzione con eventuali geometrie o materiali differenti (o entrambi). Nella configurazione ipotizzata, gli schermi presentano una geometria con una sezione ad “L” e possono essere costruiti utilizzando tecniche diverse. La prima possibilità è quella che siano costituiti da due pezzi separati che vengono poi saldati insieme: un anello esterno che funge da zona di ancoraggio con il basamento e una piastra piegata fino ad assumere una forma cilindrica e poi saldata per ottenere un pezzo continuo (fig. 5.12).
La seconda possibilità per la realizzazione degli schermi magnetici è quella di ottenere direttamente i pezzi finiti con una lavorazione alle macchine utensili: le tecniche di tornitura hanno raggiunto ormai una precisione tale da riuscire a lavorare spessori molto piccoli e grandi profondità, proprio come nel caso di questi elementi (fig. 5.13).
Le due soluzioni proposte sono egualmente valide e ed efficaci al fine della realizzazione dei componenti: la scelta per una soluzione o per l’altra dipenderà dalla
valutazione dei tecnici incaricati del lavoro che dovranno scegliere quale delle due possibilità offra la maggiore semplicità e presenti i costi minori.
Figura 5.12 - Schermo magnetico costituito da due pezzi
Figura 5.13 - Schermo magnetico come pezzo unico
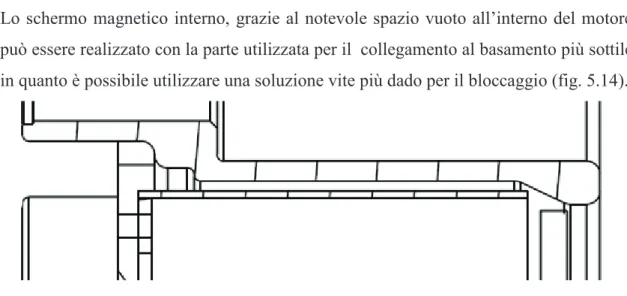
Lo schermo magnetico interno, grazie al notevole spazio vuoto all’interno del motore, può essere realizzato con la parte utilizzata per il collegamento al basamento più sottile, in quanto è possibile utilizzare una soluzione vite più dado per il bloccaggio (fig. 5.14).
Figura 5.14 - Schermo magnetico interno nel propulsore
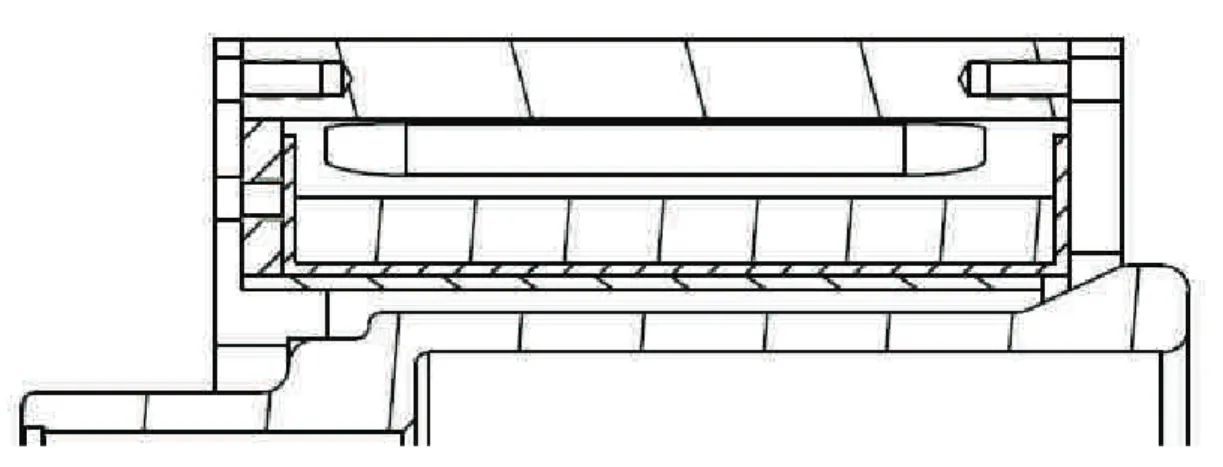
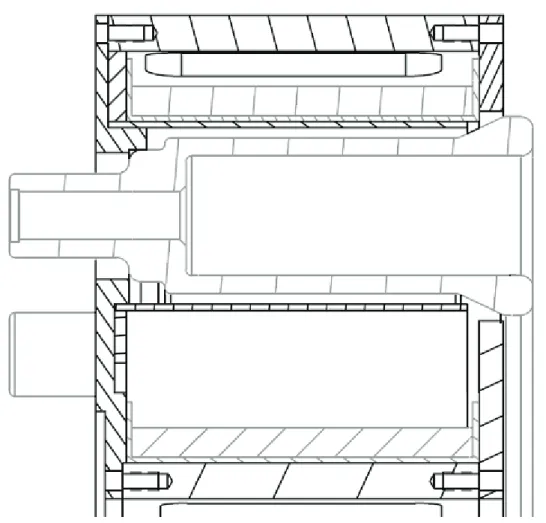
Lo schermo magnetico esterno al contrario necessita di uno spessore maggiore nella parte utilizzata per il collegamento, in quanto non è possibile utilizzare un dado assieme alla vite a causa della presenza della bobina esterna del propulsore (fig. 5.15): lo le dimensioni maggiori sono necessarie per avere un numero sufficiente di filetti in presa sul componente da fissare.
Figura 5.15 - Posizione dello schermo magnetico nel propulsore
Basamento
La piastra di base, o basamento, è l’elemento rispetto al quale vengono fissati e centrati tutti gli altri: per questo si è cercato di conferirgli un profilo relativamente lineare e semplice da realizzare. A seguito delle geometrie ipotizzate per gli altri componenti, il basamento presenta la seguente configurazione (fig. 5.16): la presenza di molti fori passanti, per l’installazione di bulloneria e per il fissaggio degli elementi interni alleggerisce notevolmente la struttura.
Figura 5.16 - Sezione della piastra di base
Il centraggio del canale ceramico è effettuato solamente sul lato esterno per permettere eventuali dilatazioni termiche del materiale ferromagnetico senza che questo possa danneggiare il canale ceramico.
La zona per il fissaggio e il posizionamento della bobina e del polo esterni presenta un andamento a “S” per permettere di mantenere nella giusta posizione relativa questi componenti.
Configurazione del circuito
La configurazione iniziale per il circuito magnetico, utilizzata come punto di partenza per l’analisi, è riportata nella figura seguente (fig. 5. 17)
Figura 5.17 - Configurazione iniziale del circuito magnetico
5.3.2 Materiale per il circuito magnetico
Per ottenere una corretta ionizzazione del gas è fondamentale riuscire a costruire un campo magnetico radiale con un andamento ed una intensità sottoposte a dei vincoli ben precisi (come vedremo nel capitolo successivo). Il materiale del circuito magnetico ha la sua importanza anche dal punto di vista termico: una conducibilità termica più elevata garantisce infatti una distribuzione più omogenea del calore, portando benefici all’intero funzionamento. Si è scelto a riguardo il ferro ARMCO, un ferro con alto grado di purezza e dalle caratteristiche magnetiche molto buone, preferito all’AISI 1010 per ragioni di reperibilità e costi e anche per la sua maggiore conducibilità termica.
Lo svantaggio principale del ferro ARMCO è rappresentato dal peggioramento del comportamento magnetico in seguito a lavorazioni meccaniche. Questo problema può essere aggirato eseguendo un trattamento di ricottura, che riporta ad ottimi livelli le
5.4 Analisi e ottimizzazione
Gli obiettivi del processo di analisi del circuito magnetico, in base a quanto detto in precedenza, sono identificabili con:
• garantire un valore adeguato del picco massimo della componente radiale del campo magnetico lungo la linea mediana del canale (175 Gauss è il valore stabilito attraverso la procedura di scalatura una volta scelto il potenziale da applicare);
• garantire che il picco sia collocato all’uscita del canale;
• massimizzare il gradiente della componente radiale del campo magnetico lungo la linea mediana del canale;
• garantire che la lunghezza di dimezzamento della componente radiale del campo magnetico minore della metà della lunghezza del canale;
• garantire che il materiale del circuito magnetico non raggiunga la saturazione; • minimizzare il peso e mantenere una geometria semplice per il circuito
magnetico.
5.4.1 Software per l’analisi
La configurazione del campo magnetico all'interno di un propulsore a effetto Hall si presenta, almeno dal punto di vista teorico, con una simmetria di tipo assiale e anche il circuito magnetico che lo genera, può essere considerato essenzialmente come un componente di tipo assialsimmetrico, a meno di asimmetrie locali dovute a diversi fattori realizzativi.
Questa considerazione rende possibile ridurre il problema di una dimensione, con un notevole risparmio nei tempi di calcolo e permette un’analisi più dettagliata di diverse
geometrie e configurazioni, al fine di effettuare l’ottimizzazione del circuito necessaria ad ottenere il campo richiesto. Una geometria bidimensionale, inoltre, diminuisce enormemente la mole di dati da raccogliere per l’analisi delle soluzioni, rendendo più facile la loro visualizzazione e velocizzando giudizi qualitativi e quantitativi sulle diverse alternative.
Il software utilizzato per l’analisi magnetica è il FEMM 4.2; questo programma permette lo studio di una configurazione assialsimmetrica del campo magnetico, a partire dalla geometria di una singola sezione e dalla conoscenza del valore delle correnti totali nelle bobine. I risultati possono essere visualizzati direttamente in forma grafica, permettendo un’immediata analisi qualitativa della soluzione, o esportati in forma numerica per permettere il confronto fra diverse soluzioni.
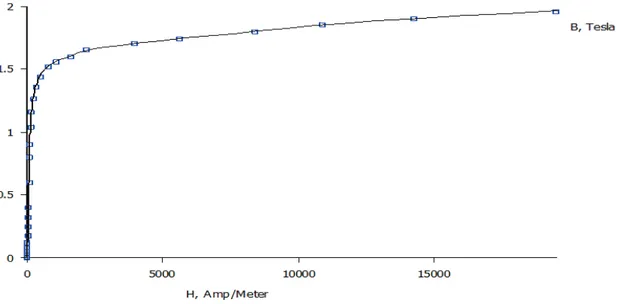
Possiede inoltre una libreria interna di materiali che permette di assegnare automaticamente le proprietà ai vari blocchi. Per i materiali non presenti direttamente, come il ferro ARMCO, c’è la possibilità di inserire puntualmente l’andamento per la curva B-H del materiale. La curva utilizzata nell’analisi per il ferro ARMCO è riportata
di seguito (fig. 5.18).
Figura 5.18 - Curva B-H relativa al ferro ARMCO
5.4.2 Schematizzazione degli avvolgimenti
I due componenti essenziali per formare il tipo di campo magnetico richiesto per il funzionamento del propulsore sono il circuito ferromagnetico e gli avvolgimenti. Ma se
fili nell’avvolgimento, così da tenere conto della presenza degli spazi vuoti all’interno della bobina.
Per calcolare sezione equivalente complessiva delle bobine S è stata ricavato il valore
dell’altezza equivalente h dell’avvolgimento:
l A n h A n h l S w w ⋅ = → ⋅ = ⋅ = (5.11)
dove A è la sezione del cavo utilizzato, n il numero di avvolgimenti presenti nella w
singola bobina e l la profondità dei supporti degli avvolgimenti. Nella figura seguente è
illustrata la schematizzazione adottata (fig 5.19)
Figura 5.19 - Geometria avvolgimenti realistica e semplificata
Il programma di calcolo FEMM definisce gli avvolgimenti semplicemente indicando la corrente e il numero di spire nel blocco selezionato. Successivamente la corrente totale viene automaticamente calcolata e suddivisa uniformemente nell’area del blocco.
5.4.3 Analisi della configurazione di base
Come primo passo si è analizzata la configurazione base ricavata in precedenza. Nella figura seguente è riportata la sezione del propulsore, come viene visualizzata dal software di analisi (fig 5.20).
Figura 5.20 - Sezione propulsore nel software FEMM
Nei vari blocchi è riportato il materiale corrispondente, per le bobine le caratteristiche del cavo e il numero di avvolgimenti oltre alla corrente che scorre nel circuito. Gli elementi di materiale non ferromagnetico hanno pochissima influenza sul campo magnetico, e hai fini dell’analisi hanno praticamente la stessa permeabilità magnetica relativa dell'aria; sono stati però inseriti per avere una rappresentazione più completa del propulsore.
sezione dei poli in corrispondenza di tali aperture. Il risultato è mostrato nella figura seguente (fig. 5.21).
Figura 5.21 - Sezione con poli magnetici modificati
Per raccogliere e confrontare i risultati ottenuti è stata utilizzato lo script lua, una
funzione fornita del software FEMM, che permette di automatizzare molte delle funzioni del programma (in Appendice B è riportato il testo dello script utilizzato per l’analisi e vengono spiegatele funzioni dei vari comandi).
In questo modo è stato possibile raccogliere i dati di interesse sottoforma di tabelle, nelle quali è stato riportato il valore del campo magnetico radiale in funzione della posizione all’interno del canale di accelerazione. Dalle tabelle ottenute sono stati ricavati dei grafici utilizzando un codice MatLab. Questo permette una veloce
visualizzazione dei risultati, in modo da verificare se le condizioni imposte sono state rispettate. Come vedremo di seguito, utilizzando i grafici sarà possibile confrontare in modo rapido ed efficace gli effetti dovuti ai cambiamenti imposti alla geometria o hai vari parametri del propulsore per arrivare alla configurazione ottimale che rispetta i vincoli imposti. Ad ogni modifica effettuata sulla configurazione del circuito magnetico si è scelto il risultato migliore ottenuto nel caso in esame come punto di partenza per il proseguimento dell’analisi.
I valori del campo magnetico radiale sono stati raccolti lungo la linea mediana del canale di accelerazione del propulsore (indicata in rosso nella figura precedente), in quanto è lungo questa sezione che si devono verificare che le condizioni raggiunte rispettino i vincoli imposti per l’analisi.
Di seguito è riportato il risultato dell’analisi sulla configurazione base del propulsore (fig. 5.22): la corrente utilizzata negli avvolgimenti per questa prima analisi è pari a 5 A; le linee di flusso sono state ridotte al minimo per permettere una migliore visione delle zone di saturazione.
Figura 5.22 - Analisi magnetica configurazione di base
Dalla figura precedente possiamo vedere come il circuito magnetico si trova sotto la soglia di saturazione ad eccezione per lo schermo magnetico esterno, dove il valore del flusso magnetico specifico supera il valore massimo consentito di 1,6 Tesla.
0 1 2 3 4 5 6 7 0 0.002 0.004 0.006 0.008 Canale [cm] C a m p o M a g n e ti c o N Fine Canale
Figura 5.23 - Andamento del campo magnetico radiale
Questo primo tentativo presenta un buon punto di partenza per l’ottimizzazione della configurazione del campo magnetico lungo il canale di accelerazione, in quanto il picco del campo magnetico si trova vicino all’uscita del canale, presenta un gradiente elevato e la lunghezza di dimezzamento del campo magnetico stesso è inferiore alla metà della zona compresa tra la fine dell’anodo e la fine del canale. Sono presenti però anche alcuni difetti rappresentati dal valore troppo elevato del campo magnetico alla fine dell’anodo, che impedisce di usufruire di un gradiente ancora più elevato e dal picco ancora troppo basso rispetto al valore cercato.
5.4.4 Effetto della variazione dello spessore degli schermi magnetici
Il primo parametro modificato, per verificarne gli effetti sull’andamento del campo magnetico all’interno del canale, è stato lo spessore degli schermi magnetici.
Lo schermo magnetico interno non presenta particolari limitazioni geometriche in quanto si trova nella zona “vuota” del propulsore e quindi permetterebbe un aumento teorico dello spessore molto elevato. Al contrario lo schermo magnetico esterno si trova
in una zona fortemente vincolata dai componenti già esistenti e quindi la possibile variazione di spessore è molto limitata e deve avvenire rispettando precisi vincoli. Per questo motivo l’aumento di spessore è stato di 0.5 mm rispetto al valore iniziale di 1 mm.
Si è deciso di valutare l’effetto di un aumento di spessore degli schermi magnetici valutando prima l’effetto di ognuno di essi separatamente e poi il loro effetto complessivo.
Figura 5.24 - Effetto della variazione dello spessore degli schemi magnetici
Si vede (fig. 5. 24) come aumentando lo spessore dello schermo interno (sezione A) il problema della saturazione, come ci si poteva aspettare, non viene risolto in quanto il flusso che passa per lo schermo magnetico esterno non viene influenzato dalla modifica apportata. Al contrario la saturazione del materiale ferromagnetico viene evitata aumentando lo spessore dello schermo magnetico esterno (sezione B). Anche nel terzo caso (sezione C), che combina entrambe le variazioni, la saturazione viene evitata.
0 1 2 3 4 5 6 7 0 0.002 0.004 0.006 0.008 0.01 0.012 Canale [cm] C a m p o M a g n e ti c o N o rm a le ( B *n [ T ]) Fine Canale Fine Anodo
Schermo int da 1.5mm (i) Schermo ext da 1.5mm Schermi da 1.5mm
Figura 5.25 - Andamento del campo magnetico radiale (variazione spessore schermi)
Dal grafico precedente possiamo osservare come l’aumento dello spessore dello schermo esterno non comporti sensibili vantaggi per l’andamento del campo magnetico, in quanto la variazione rispetto alla configurazione base risulta minima. Si è inoltre voluto osservare se aumentando lo spessore in un specifica direzione potesse apportare modifiche al grafico, ipotizzando prima un aumento dello spessore in direzione del canale ceramico e poi nella direzione dell’asse del propulsore: come è possibile osservare (grafici rosso e verde) questa scelta non comporta praticamente nessuna variazione del risultato finale.
Variando lo spessore dello schermo magnetico esterno si può osservare una diminuzione notevole del valore del campo magnetico alla sezione di uscita dell’anodo con un conseguente aumento del gradiente del campo lungo il canale. A questi effetti positivi si contrappone la diminuzione del valore picco massimo del campo magnetico.
Come vedremo in seguito quest’ultimo problema è aggirabile tramite ulteriori modifiche della geometria.
L’ultimo grafico rappresenta la combinazione delle due soluzioni precedenti (grafico viola) in cui entrambi gli schermi hanno subito un aumento dello spessore: quest’ultima configurazione presenta una ulteriore diminuzione del valore del campo magnetico alla fine dell’anodo e diminuzione del valore massimo del picco, anche se entrambe di valore inferiore rispetto al caso precedente.
Un ulteriore aumento dello spessore dello schermo magnetico interno non porta nessun beneficio apprezzabile nell’andamento del campo magnetico radiale (fig. 5.26).
0 1 2 3 4 5 6 7 0 0.005 0.01 0.015 Canale [cm] C a m p o M a g n e ti c o N o rm a le ( B *n [ T ])
Effetto aumento spessore schermo interno
Fine Canale Fine Anodo
Schermi da 1.5mm Schermo int da 2mm Schermo int da 2.5mm
Figura 5.26 - Effetto dell’aumento dello spessore dello schermo interno
Infine è possibile analizzare l’effetto dello spostamento dello schermo magnetico interno in direzione dell’asse del propulsore (fig. 5.27): come si vede dal grafico, il progressivo spostamento della posizione dello schermo interno comporta un aumento del picco del valore massimo del campo magnetico; allo spesso tempo però la variazione della posizione causa anche una diminuzione del gradiente lungo il canale di accelerazione e quindi lo schermo magnetico interno è stato mantenuto nella sua posizione originale.
0 1 2 3 4 5 6 7 0 0.002 0.004 0.006 0.008 Canale [cm] C a m p o M a g n e ti c o N Fine Canale
Figura 5.27 - Effetto dello spostamento dello schermo interno
5.4.5 Effetto della variazione della lunghezza degli schermi magnetici
Il secondo parametro modificato durante l’analisi è rappresentato dalla lunghezza degli schermi magnetici: la riluttanza magnetica del traferro infatti varia linearmente con la sua lunghezza; cambiando la riluttanza del ramo del circuito passante per lo scudo, si cambia sostanzialmente la quantità di flusso che passerà attraverso gli scudi e quella che passerà attraverso il traferro principale.
La riduzione della lunghezza degli schermi magnetici ha anche il vantaggio di aumentare la distanza tra la parte terminale del canale ceramico e gli schermi stessi, visto che l’aumento di spessore operato in precedenza aveva ridotto tale distanza.
Come si vede dai grafici (fig. 5.25, 5.29), una diminuzione della lunghezza degli schermi magnetici, comporta un vantaggio in termini di aumento del gradiente e aumento del picco massimo per il valore del campo magnetico radiale lungo il canale: l’effetto delle singole variazioni presenta un andamento molto simile.
0 1 2 3 4 5 6 7 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 Canale [cm] C a m p o M a g n e ti c o N o rm a le ( B *n [ T ])
Effetto riduzione lunghezza schermo esterno, (Schermi da 1.5mm)
Fine Canale Fine Anodo Base Schermo ext L -1 mm Schermo ext L -2 mm Schermo ext L -3 mm Schermo ext L -4 mm
Figura 5.28 - Effetto della diminuzione della lunghezza dello schermo esterno
0 1 2 3 4 5 6 7 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 Canale [cm] C a m p o M a g n e ti c o N o rm a le ( B *n [ T ])
Effetto riduzione lunghezza schermo esterno, (Schermi da 1.5mm)
Fine Canale Fine Anodo Base Schermo int L -1 mm Schermo int L -2 mm Schermo int L -3 mm Schermo int L -4 mm
0 1 2 3 4 5 6 7 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 Canale [cm] C a m p o M a g n e ti c o N o rm a le ( B *n [ T ]) Fine Canale Fine Anodo Schermi L -1 mm Schermi L -2 mm Schermi L -3 mm Schermi L -4 mm
Figura 5.30 - Effetto della diminuzione della lunghezza degli schermi
Dall’analisi del grafico precedente si nota come una diminuzione della lunghezza degli schermi comporti uno spostamento del picco del campo magnetico verso l’interno del canale di accelerazione rispetto alla sezione di uscita: per evitare un valore troppo elevato di questo effetto, si è limitata la riduzione della lunghezza per entrambi gli schermi al valore di 2 mm.
5.4.6 Effetto della variazione dello spessore e della distanza delle espansioni polari
La forma delle espansioni polari del circuito può influenzare l’andamento del campo magnetico radiale all’interno del canale di accelerazione: in questa sezione saranno analizzate delle semplici variazioni della geometria delle espansioni polari e i loro
effetti. La prima modifica effettuata ha riguardato una semplice riduzione dello spessore delle espansioni polari, come mostrato di seguito (fig. 5.31).
Figura 5.31 - Modifica spessore espansioni polari
Questa nuova configurazione ha prodotto una diminuzione del picco massimo del campo magnetico. Un possibile rimedio è rappresentato dalla presenza di uno scalino in prossimità dell’estremità rivolta verso il canale di accelerazione, che limiti l’effetto introdotto dalla diminuzione dello spessore delle espansioni (fig. 5.32).
0 1 2 3 4 5 6 7 0 0.002 0.004 0.006 0.008 0.01 0.012 Canale [cm] C a m p o M a g n e ti c o N o rm a le ( Fine Canale Fine Anodo
Figura 5.33 - Effetto della variazione delle geometria delle espansioni
L’accorgimento adottato evita l’abbassamento del picco del campo magnetico riportando l’andamento del grafico vicino ai valori della configurazione iniziale. Visti i risultati ottenuti si è deciso di continuare l’analisi del circuito magnetico lasciando invariata la configurazione geometrica iniziale per le espansioni polari, in quanto più semplice e rapida da realizzare.
Un altro parametro modificabile per le espansioni polari è rappresentato dalla loro distanza rispetto al canale ceramico del propulsore, e di conseguenza dalla lunghezza del traferro presente tra le espansioni stesse: gli effetti della diminuzione del raggio interno delle espansioni è raffigurato di seguito (fig. 5.34).
Come c’era da aspettarsi l’aumento del traferro tra le espansioni polari, ha comportato un aumento della riluttanza magnetica del ramo in questione, con la conseguente diminuzione del flusso di campo magnetico che lo attraversa. Anche questa modifica è stata quindi scartata nel proseguo dell’analisi, in quanto comporta un evidente diminuzione del picco del campo magnetico radiale.
0 1 2 3 4 5 6 7 0 0.002 0.004 0.006 0.008 0.01 0.012 0.014 0.016 0.018 Canale [cm] C a m p o M a g n e ti c o N o rm a le ( B *n [ T ])
Effetto variazione distanza espansioni polari
Fine Canale Fine Anodo
Base
Distanza +1 mm Distanza +2 mm
Figura 5.34 - Effetto dell’aumento della distanza delle espansioni polari dal canale ceramico
Semplici variazioni della configurazione delle espansioni polari non sono sufficienti per ottenere miglioramenti dell’andamento del campo magnetico radiale all’interno del canale. Lo studio di una possibile configurazione alternativa per le espansioni potrà essere portato avanti in una successiva fase di ottimizzazione per il propulsore.
5.4.7 Effetto della variazione della posizione della bobina interna
Al contrario delle bobina esterna del propulsore, la cui posizione risulta fortemente vincolata dai componenti esistenti, quella interna presenta una maggiore possibilità di spostamento in senso assiale. Si è deciso di verificare gli effetti di tale spostamento (fig. 5.35): nel grafico seguente l’aumento di distanza è da considerarsi a partire dal superficie posteriore del basamento.
0 1 2 3 4 5 6 7 0 0.002 0.004 0.006 0.008 Canale [cm] C a m p o M a g n e ti c o N Fine Canale Fine Anodo
Figura 5.35 - Effetto della variazione della posizione della bobina interna
Dal grafico risulta che lo spostamento della bobina del propulsore non modifica sostanzialmente l’andamento del campo magnetico, comportando solo un piccolo aumento del valore del picco massimo. Si è inoltre verificato che tale modifica non cambia l’orientamento delle linee del campo magnetico alla sezione di uscita del propulsore, ma porta solamente ad una loro leggera traslazione concorde con quella della bobina (fig. 5.36).
Se per l’andamento del campo magnetico questa modifica non ha portato modifiche apprezzabili, è possibile comunque sfruttare questo spostamento per rendere la geometria del basamento ancora più semplice rispetto a quella di partenza. La modifica effettuata è riportata nella figura seguente (fig. 5.37): è stato inserito un distanziale realizzato in AISI 304 (lo stesso materiale delle bobine) per mantenere la bobina in posizione corretta, con la possibilità di modificare lo spessore di tale distanziale in caso di necessità, e il basamento presenta una sezione più lineare nella zona interna.
Figura 5.37 - Variazione geometria basamento
5.4.8 Effetto della variazione delle correnti che circolano negli avvolgimenti
0 1 2 3 4 5 6 7 0 0.005 0.01 Canale [cm] C a m p o M a g n e ti c o N Fine Canale Fine Anodo
Figura 5.38 - Effetto della variazione delle correnti negli avvolgimenti
Il risultato di un aumento della corrente che circola nelle bobine è quello di aumentare il picco massimo del campo magnetico radiale, con un conseguente piccolo incremento del suo gradiente, senza modificarne l’andamento generale. Questo è un vantaggio notevole in quanto, oltre all’effetto benefico diretto sul campo, permette anche una notevole flessibilità nella realizzazione del propulsore: un eventuale cambio di requisiti sul picco massimo del campo magnetico è facilmente ottenibile semplicemente variando il valore della corrente negli avvolgimenti ed è indipendente dall’ottimizzazione portata avanti per dare all’andamento del campo magnetico radiale lungo il canale la corretta configurazione cercata.
5.4.9 Configurazione finale
A seguito di tutte le considerazioni viste in precedenza si è arrivati ad una configurazione finale per quanto riguarda il circuito magnetico del propulsore (fig. 5. 39).
Figura 5.39 - Configurazione finale del circuito magnetico
Si è visto come con alcuni piccoli accorgimenti e modifiche, soprattutto per quanto riguarda la geometria degli schermi magnetici, si è riusciti a soddisfare gli obbiettivi imposti dall’ottimizzazione.
La geometria è stata mantenuta la più semplice possibile in questa prima analisi del circuito magnetico, per consentire una rapida realizzazione e serie di prove in laboratorio; una volta verificato il funzionamento attraverso prove sperimentali sarebbe possibile ottimizzare la geometria per avere una struttura più leggera.
Inoltre il modello realizzato consente una notevole flessibilità nell’adattarsi a possibili requisiti diversi per quanto riguarda il valore del picco del campo magnetico, che derivano da scelte diverse per il valore del potenziale e della spinta.
5.4.10 Nota sulla dimensione delle “finestre” presenti nei poli magnetici
Le dimensioni delle “finestre” presenti nei poli magnetici, raffigurate in precedenza (fig. 5.7), sono solo una rappresentazione della possibile geometria ottenibile per questi
dimezzare il peso del componente senza aperture (da 3.78 Kg a 2.11 Kg), consente di
evitare i problemi di saturazione per tutte le combinazioni di campo magnetico massimo richiesto e corrente negli avvolgimenti analizzate, senza essere troppo gravoso dal punto di vista della resistenza meccanica. In una successiva fase di ottimizzazione sarà necessario effettuare una simulazione tridimensionale della situazione magnetica del propulsore per verificare quanto lontani ci si trovi realmente dalla condizione di saturazione e, di conseguenza, quanto è possibile aumentare ulteriormente le dimensioni delle “finestre”.