10
10
IL SISTEMA DI POTENZA
10.1 Introduzione
Lo scopo di questo capitolo riguarda lo sviluppo del sistema di generazione di potenza in tutte le sue parti.
Tipicamente esistono quattro tipi di generatori di potenza elettrica per un si-stema satellitare: il sisi-stema fotovoltaico, in cui particolari semiconduttori catturano la radiazione luminosa prodotta dal Sole e la trasformano direttamente in energia elet-trica, che è il mezzo più utilizzato per i sistemi orbitanti intorno alla terra; il sistema a sorgente di potenza statica, in cui una sorgente di calore, normalmente un materia-le con decadimento radioattivo, è utilizzata per una conversione termoemateria-lettrica diret-ta; questo sistema adopera due materiali semiconduttori drogati di tipo p e di tipo n collegati in serie, da un lato alla sorgente di calore ed all‘altro lato ad un materiale più freddo, per produrre direttamente energia elettrica attraverso il gradiente di tem-peratura tra i loro estremi; un altro tipo di concetto per la sorgente di potenza statica è quello di coppia termoionica, grazie al quale si ha produzione di energia elettrica attraverso due elettrodi, uno caldo ed uno freddo, accoppiati per mezzo di un gas io-nizzato contenuto in un contenitore sigillato. Il sistema a sorgenti di potenza dinami-ca, in cui una sorgente calda, che può essere un reattore nucleare, radioisotopi o e-nergia solare concentrata, ed uno scambiatore di calore sono usati per produrre ener-gia tramite un ciclo termodinamico, tra i più usati si ricordano quelli Rankine, Stir-ling e Brayton, di un fluido di lavoro; il sistema a celle a combustibile in cui l’energia elettrica è prodotta tramite una reazione di ossidazione, la più usata nelle applicazioni spaziali è quella ad Idrogeno-Ossigeno. Il problema delle celle a com-bustibile è che devono trasportare il reagente, per cui più lunga è la missione più grande dev’essere il serbatoio. Nella tabella 10.1-1 sono riportate le principali carat-teristiche dei vari sistemi. Analizzando i dati storici, per satelliti in orbita terrestre,
come sistemi di generazione di potenza sono stati usati principalmente quelli di tipo fotovoltaico, data l’elevata conoscenza ed affidabilità di questo tipo di dispositivi, la necessità di non contaminare l’atmosfera ed il suolo terrestre con sostanze radioattive al momento del rientro dell’oggetto ed il non poter imbarcare pesi e volumi toppo e-levati, come nel caso delle celle a combustibile, per periodi lunghi.
Anche per il caso in questione la scelta è praticamente obbligata a pannelli so-lari come sorgente di potenza primaria; primaria in quanto il sistema di potenza fo-tovoltaico in orbita terrestre subisce periodi di eclisse in cui il sole si trova in opposi-zione alla Terra. Per ovviare alla mancanza di potenza durante tali periodi bisogna avere a bordo quella che è chiamata una sorgente di potenza secondaria, ovvero un sistema che immagazzina una parte dell’energia prodotta durante i periodi di insola-zione in un “serbatoio energetico” opportuno e che la rilascia durante le eclissi. A questo scopo vengono utilizzate batterie ricaricabili. Numerosi sono i tipi di celle a-doperate in campo spaziale: Ni-Cd , le più “anziane”, Ni-H2 ed agli Ioni di Litio, che incominciano in questi anni a venir utilizzate.
Componenti aggiuntivi sono la PDU, power distribution unit, unità di distri-buzione di potenza, i regolatori ed i controllori.
tabella 10.1-1 Comparazione tra le sorgenti di potenza elettrica più comuni. Parametri di disegno dell’EPS Fotovoltaico Solare Termodinamico Solare Radioisotopi Reattore Nucleare Cella a Combu-stibile Intervallo di Potenza (kW) 0.2 – 300 5 – 300 0.2 - 10 5 - 300 0.2 – 50 Potenza Specifica (W/kg) 25 – 200 9 – 15 5 – 20 2 - 40 275 Costo Specifico ($/W) 0.8 – 3K 1K – 2K 16K – 0.2M 0.4M – 0.7M Dati Insuf-ficienti Resistenza - Radiazione Nucleare - Minaccia Nucleare - Minaccia Laser - Impatti Bassa – Media Media Media Bassa Alta Alta Alta Media Molto Alta Molto Alta Molto Alta Molto Alta Molto Alta Molto Alta Molto Alta Molto Alta Alta Alta Alta Media Stabilità e
Manovra-bilità Bassa Media Alta Alta Alta
Resistenza
Atmosferi-ca in Orbita Bassa Alta Alta Bassa Bassa Bassa
Degradazione nella
Vita Media Media Alta Alta Alta
Necessità di Imma-gazzinamento durante le Eclissi
Si Si No No No
Sensibilità all’Angolo
di Sole Media Alta Nessuna Nessuna Nessuna
Sensibilità agli Om-breggiamenti
Bassa (con diodi
di Bypass) Alta Nessuna Nessuna Nessuna
Ostruzione della Vista
del Satellite Alta Alta Bassa
Media (do-vuta al ra-diatore)
Nessuna
Disponibilità di
Combustibile Illimitata Illimitata Molto bassa
Molto
bas-sa Media
Segnalazione dell’Analisi di Sicu-rezza
Minima Minima Routine Estensiva Routine
Segnatura IR Bassa Media Media Alta Media
Principali
Applica-zioni Orbita terrestre
Orbita terrestre e missioni interpla-netarie Missioni In-terplanetarie Missioni Interplane-tarie Missioni Interplane-tarie
10.2 Analisi delle Eclissi
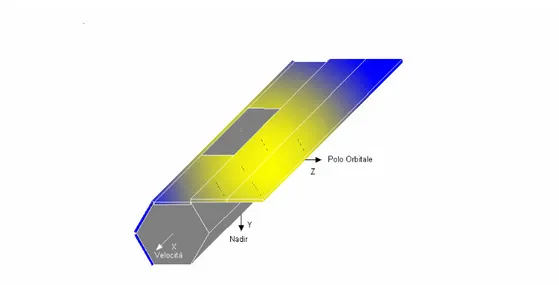
L’energia prodotta da un pannello solare è fortemente influenzata dalle con-dizioni di illuminazione a cui è soggetto durante l’orbita. Per il calcolo delle condi-zioni di illuminazione del pannello, ovvero del satellite, il sistema di riferimento più ricco di informazioni, e che permette una visione rapida dei parametri principali, è quello riportato in figura 10.2.1 A, sistema satellite-centrico, riferito a Terra.
figura 10.2.1 Sistemi di riferimento utili al calcolo delle eclissi.
Nella figura è riportata la sfera celeste centrata sul satellite in cui la posizione della Terra è supposta fissata lungo l’asse X positivo (direzione del Nadir), questo perché il satellite, per svolgere la sua missione di comunicazione ed osservazione, si mantiene nel suo percorso con una faccia costantemente orientata verso la superficie terrestre ed un’altra verso il polo orbitale. Dacché la posizione della Terra è supposta fissata, il Sole, in questo sistema di riferimento possiede un moto apparente di rota-zione attorno al polo orbitale e sviluppa, una volta per orbita, una traiettoria appros-simabile ad una circonferenza; la linea in grassetto in figura ci mostra questo cammi-no tipico del Sole durante un’orbita. Il movimento della Terra attorcammi-no al Sole si svi-luppa sul piano dell’Eclittica, inclinato rispetto all’Equatore terrestre di 23.9°, l’orbita su cui si muove il satellite è, a sua volta, inclinata rispetto all’equatore terre-stre; il cammino tipico del Sole si sposterà in alto ed in basso, a seconda della Sta-gione tra due circonferenze limite ai Solstizi, di longitudine massima
(
ie i)
smax =± +
β
con ie l’inclinazione del piano dell’eclittica rispetto al piano equatoriale terrestre e con i l’inclinazione del piano orbitale.
Il valore della longitudine del cammino tipico del Sole sulla sfera celeste vie-ne approssimato costante su un’orbita e variabile con andamento sinusoidale durante l’anno; utilizzando le regole di geometria sferica ed ipotizzando che l’orbita terrestre sia circolare con, quindi, velocità di rotazione attorno al Sole costante, il valore di e-levazione del sole rispetto al piano orbitale per una determinata orbita risulta essere
( )
(
)
(
)
⋅ ⋅ − ⋅=sin− sin + sin 2 1
max 1 n N n s s π β β 10.2-2 con βsmax+ il valore positivo dell’angolo di elevazione massimo, N il valore comples-sivo delle orbite percorse durante un anno ed n l’orbita per cui lo vogliamo determi-nare.
Per il calcolo dei tempi di eclissi a cui è sottoposto il satellite durante la sua orbita è necessario prendere visione della in figura 10.2.1 B, che introduce i parame-tri necessari. Si osservi come il periodo che il satellite passa in eclissi risulti essere dipendente dall’orbita che prendiamo in considerazione durante l’anno. Il valore massimo di eclissi si avrà durante gli equinozi vernali, per cui il Sole traccia un cammino sul piano orbitale, ed il valore minimo invece ai solstizi, cioè quando il va-lore di elevazione del Sole rispetto al piano orbitale è massimo.
Il valore del semi-angolo di eclissi, Φ/2 , dalle note relazioni di geometria sfe-rica, risulta essere una funzione della longitudine del Sole e del raggio angolare ter-restre ρ, a sua volta funzione di Re, raggio terter-restre, ed H , quota di volo secondo la 5.5-5 .
( )
( )
= Φ − β ρ cos cos cos 2 1 10.2-3 Per quanto riguarda allora il tempo trascorso in eclissi si ottieneπ ⋅ Φ ⋅ = 2 P te . 10.2-4 Il fatto che il satellite trascorra un determinato tempo in eclissi non vuol dire che sia questo il periodo da considerare per determinare la frazione di periodo orbita-le in cui il pannello non produce energia. Infatti può essere che, sebbene il Soorbita-le non
si posizioni alle spalle del disco terrestre, l’angolo che il vettore pannello-Sole forma col vettore normale al pannello sia maggiore di 90°, ovvero che ne sia illuminata la faccia posteriore. Per la determinazione di queste grandezze è opportuno riferirsi alla figura 10.2.2, figura geometricamente equivalente alla figura 10.2.1 B. In questo si-stema di riferimento, ancora una volta fissato sul satellite, la normale ad una qualsiasi faccia è rappresentata da un punto, N, sulla sfera celeste. N rimane fissato durante il movimento del Sole sulla circonferenza di elevazione βs.
figura 10.2.2 Schema condizioni illuminazione
βs’ e γ sono gli angoli che il Sole ed N formano con il polo orbitale, il primo resta costante durante un’orbita, il secondo durante tutta la vita del satellite, a meno che tale faccia non sia dotata di un movimento rispetto al resto del corpo. L’angolo di rotazione ∆Az è la differenza azimutale tra il Sole ed N e varia uniformemente duran-te un’orbita tra 0° e 360°.
L’angolo β tra il Sole ed N varia sinusoidalmente tra un massimo ed un mi-nimo di valore γ β βmax = s'+ 10.2-5 γ β βmin = s'− . 10.2-6 Analizzando un’orbita completa una faccia può essere nascosta al Sole in due casi:
• se β > 90° , per cui il Sole incide sulla parte posteriore della faccia di interesse.
Utilizzando la 10.2-3 si determina, durante le eclissi, l’angolo di azimut di i-nizio e fine dell’eclissi
2 0 Φ ± = Az Azeclipse 10.2-7 con Az0 l’angolo di azimut del Nadir relativo ad N. Per il calcolo dei valori dell’angolo di azimut per la seconda condizione, quando il sole va in opposizione al-la faccia di interesse, adoperiamo al-la geometria sferica con β = 90° , da cui
( )
( )
⋅ − ± = − ' tan tan 1 cos 1 s back Az β γ 10.2-8 con le grandezze prima definite.Analogamente, con le note formule di geometria sferica, sempre riferendosi alla figura 10.2.2 per capire le grandezze in gioco, si può calcolare l’andamento dell’angolo β durante un orbita, una volta definito l’andamento di ∆Az(t), attraverso la formula
( )
( )
( )
( )
(
( )
)
(
⋅ s + ⋅ s ⋅ ∆Az t)
=cos−1 cosγ cos β ' sin γ sin β ' cos
β
10.2-9 Il valore di ∆Az(t) viene calcolato dividendo l’orbita in tre parti, una prima in cui il satellite si trova nell’ombra della terra a cavallo del nadir tra Az0 = 0 ed Azeclipse = 0, oppure fino al valore Azeclipse = Azback se Azback > Azeclipse ,una seconda tra il valo-re Azeclipse ed il valovalo-re valo-relativo al semiperiodo π/2, in cui il valovalo-re di β aumenta ed una terza parte tra il valore di azimut relativo al semiperiodo ed il valore 2π- Azeclipse, in cui il valore di β diminuisce.
Imponendo che t(Azeclipse) = 0 si determina che
π π P Azeclipse t = ⋅ 2 2 10.2-10 con P il valore del periodo che per una generica orbita risulta essere
µ
π 3
2 a
P= ⋅ ⋅
10.2-11 con a il valore del semiasse maggiore e
2 3 5 sec 10 986 . 3 ⋅ km = µ 10.2-12 il parametro di gravitazione terrestre. Allora si ottiene che
( )
⋅ ≤ ≤ ⋅ − ⋅ ⋅ ⋅ < ≤ + ⋅ ⋅ − = ∆ π π π π π eclipse eclipse eclipse eclipse eclipse Az P t Az P Az t P Az P t Az t P t Az 2 2 2 0 2 . 10.2-1310.3 Pannelli Solari
Dato che la scelta si basa sul pannello fotovoltaico si può ricordare che un pannello solare è formato da una serie di celle, formate da opportuni semiconduttori drogati, ovvero a cui sono state aggiunte piccole quantità di altri materiali speciali, collegati in maniera da convertire l’energia di radiazione prodotta dal Sole in energia elettrica, attraverso quella che è chiamata conversione fotovoltaica.
I pannelli solari possono essere montati sul corpo del satellite oppure su strut-ture dedicate lontane dal corpo. La prima configurazione è usata per piccoli satelliti con piccole prestazioni e piccole richieste di potenza, normalmente su satelliti in cui la stabilizzazione è a rotazione, singola o doppia. Questo tipo di scelta richiede una particolare attenzione per il progetto del controllo termico in quanto il pannello irra-dia all’interno del corpo scaldandolo. La seconda scelta, se da una parte può diminui-re i problemi di riscaldamento eccessivo dell’interno del corpo del satellite, porta alla complicazione dell’impianto di dispiegamento. Infatti i pannelli montati su ali stanno richiusi durante le fasi di lancio e vengono poi aperti una volta che il satellite è stato immesso con successo nell’orbita finale. Normalmente i pannelli non vengono aperti durante un’eventuale orbita di trasferimento per evitare che zone di radiazioni parti-colari possano incidere sulle prestazioni nell’orbita finale, serve, allora, un’opportuna sorgente di potenza secondaria che permetta il funzionamento degli apparati di
con-trollo. Un pannello montato in questa maniera può anche richiedere particolari mec-canismi per un puntamento attivo verso il Sole, soprattutto per satelliti in orbita GEO. Questo tipo di scelta è normalmente effettuata per satelliti stabilizzati a 3-assi.
10.4 Celle Solari
Al giorno d’oggi numerosi sono i tipi di cella solare presenti sul mercato. Il tipo più semplice consiste in una giunzione p-n, due semiconduttori drogati uno in maniera positiva,cioè con un materiale con un elettrone di legame in meno, e l’altro in maniera negativa, con un materiale con un elettrone di legame in più, al silicio.
figura 10.4.1 Grafico I,P-V tipico per una cella al Si
La figura 10.4.1 ci mostra il grafico Voltaggio-Corrente, Potenza tipico di una cella al Silicio. Una cella al Silicio ha una densità di corrente prodotta elevata, circa 30 mA/cm², ed un voltaggio limitato, intorno ai 0.45 V quello di massima potenza e 0.55 V quello a circuito aperto, ma il problema principale della cella al Si è l’efficienza molto bassa con un massimo teorico, come in tabella 10.4-1, circa del 20%. Questo limite è, però, stato raggiunto in prove di laboratorio, ciò dimostra che la conoscenza su questo tipo di dispositivi è estremamente avanzata. Questo modello di cella è consigliabile in missioni a basso costo, che non richiedono potenze elevate o in cui la dimensione del pannello non è un parametro critico.
Il secondo tipo di cella utilizzato per applicazioni spaziali è quella all’Arsenuro di Gallio (GaAs). E’ questa la cella mono-giunzione e mono-materiale che ha l’efficienza teorica più alta, intorno al 24%. E’ però una cella molto più costo-sa di quella al Si, circa il triplo per W prodotto. Miglioramento di questa cella è la cella a giunzione doppia. Due giunzioni p-n, di Fosfuro di Indio (InP2) quella
livello dei dispositivi oggi in produzione il InP2 ha un’efficienza minore dell’GaAs,
18% contro il 18.5%, lascia allora passare una parte della radiazione solare che viene raccolta dallo strato inferiore di GaAs. L’efficienza complessiva aumenta arrivando circa al 22%. Un ulteriore miglioramento è la cella a giunzione tripla, il cui schema costruttivo è riportato in figura 10.4.2 . In questa cella, rispetto a quella a doppia giunzione, si aggiunge uno strato più interno di Ge otenendo tre strati che raccolgono ognuno una diversa lunghezza d’onda della radiazione solare. Lo strato superiore raccoglie la luce Blu, lo strato intermedio quella Verde ed infine lo strato inferiore la radiazione luminosa Rossa. L’efficienza della cella risulta molto migliorata, per una cella semplice raggiungiamo il 25% a livello di produzione; esistono anche celle di stato più avanzato, sempre a giunzione tripla, che raggiungono rendimenti superiori al 28%, inimmaginabili fino a pochi anni fa. Il livello di densità di corrente di mas-sima potenza prodotta da questo tipo di cella risulta essere intorno ai 15 mA/cm² ed il voltaggio, sempre di massima potenza, circa 2.3 V, che rappresenta un aumento con-siderevole rispetto alle celle al Si. L’andamento della corrente rispetto al voltaggio di questo tipo di celle è riportato in figura 10.4.3.
figura 10.4.2 Schema costruttivo cella TJ
figura 10.4.3 Caratteristica I-V tipica cella TJ
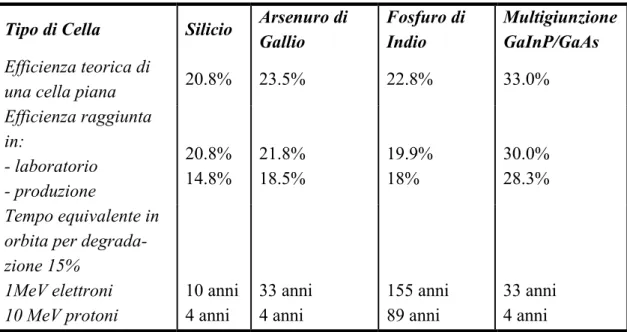
Parametro importante per condurre la scelta della cella è sicuramente, oltre l’efficienza BOL, la degradazione che il pannello subisce nel corso della missione dovuta a radiazioni, ad impatti con micro-meteoriti o con altre sostanze, come quelle che fuoriescono da un propulsore per il controllo d’assetto, dal degassaggio dei mate-riali e dai cicli termici cui è sottoposta la cella. In generale per una cella al silicio in orbita LEO abbiamo una degradazione per anno pari al 3.75%, di cui più del 2.5% dipende dalla radiazione, per una cella all’Arsenuro di Gallio il 2.75%, di cui la ra-diazione causa l’1.5%. Per celle multigiunzione si arriva allo 0.5% all’anno. Nella tabella 10.4-1 ,ottenuta da [1], sono riportate le efficienze e la sensibilità alla degra-dazione da radiazione per vari tipi di pannelli. Il pannello migliore dal punto di vista
dell’efficienza e quello a base di Arsenuro di Gallio multigiunzione, quello migliore dal punto di vista della vita operativa è quello al Fosfuro di Indio.
tabella 10.4-1 Comparazione tra diversi tipi di cella solare fotovoltaica
Tipo di Cella Silicio Arsenuro di Gallio Fosfuro di Indio Multigiunzione GaInP/GaAs Efficienza teorica di
una cella piana 20.8% 23.5% 22.8% 33.0%
Efficienza raggiunta in: - laboratorio - produzione 20.8% 14.8% 21.8% 18.5% 19.9% 18% 30.0% 28.3% Tempo equivalente in
orbita per degrada-zione 15% 1MeV elettroni 10 MeV protoni 10 anni 4 anni 33 anni 4 anni 155 anni 89 anni 33 anni 4 anni
Oltre alla degradazione da radiazione abbiamo anche una degradazione ine-rente dovuta all’assemblaggio di più celle in un pannello. Una prima causa è dovuta al fatto che le celle sono poste su uno strutture d’alluminio a nido d’ape e connesse tra di loro; altra degradazione è dovuta all’ombreggiamento di alcune celle dato da appendici del satellite ed alla temperatura del pannello che può arriva fino ad oltre 67 °C in orbita LEO quando la temperatura a cui sono fornite le efficienze delle celle è normalmente 28 °C; nella tabella 10.4-2, ancora una volta trovata in [1], sono ripor-tati i valori relativi a questi tipi di degradazione.
tabella 10.4-2 Elementi della degradazione inerente del pannello solare
Elementi della degradazione
ine-rente Nominale Intervallo
Disegno ed Assemblaggio 0.85 0.77 – 0.90
Temperatura del pannello 0.85 0.80 – 0.98
Ombreggiamento delle celle 1.00 0.80 – 1.00
Degradazione inerente Id 0.77 0.49 – 0.88
Possiamo osservare, dai dati tabulati, che la cella al Si oltre ad avere una mi-nor efficienza risulta avere anche una mimi-nor resistenza alle radiazioni. In più la va-riazione di voltaggio e di densità di corrente per una cella al Si sono circa –2.2
mV/°C e 30 µA/cm²/°C quando per una cella a tripla giunzione –7.2 mV/°C e 14 µ-A/cm²/°C.
Data la necessità di avere elevata potenza legata ad una criticità della dimen-sione del pannello, la cella a giunzione tripla è la scelta opportuna per il nostro caso, avendo elevata efficienza e bassa degradazione. Le caratteristiche di questo disposi-tivo ottenute da dati forniti dalla ditta Spectrolab Inc. [20] sono riassunte nella tabella 10.4-3.
tabella 10.4-3 Caratteristiche della cella a giunzione tripla
Efficienza BOL 25.1%
Parametri Elettrici tipici (AMO (1353 W/m²), 28°C, cella nuda)
Jsc 15.6 (mA/cm²)
Jmp 14.9 (mA/cm²)
Voc 2.545 V
Vmp 2.275 V
Degradazione da assemblaggio 0.85
Degradazione da Radiazione (Flusso 1MeV Elettroni/cm²)
Parametro 1014 3·1014 1015
Imp / Imp0 0.99 0.97 0.90
Vmp / Vmp0 0.97 0.92 0.92
Proprietà termiche
Parametro Superficie
Fron-tale Superficie Posteriore
Fattore di assorbimento 0.92 0.1-0.9 Emettenza 0.86 0.9 Coefficienti di temperatura Parametri BOL 1015 Jmp (µA/cm²/°C) 6 14 Vmp (mV/°C) 6.7 -7.2 Peso 84 mg/cm² @ 140 µm di spessore
Spessore 175 µm con peso equivalente a
140 µm
Potenza BOL 289 W/m²
10.5 Analisi configurazione geometrica del Pannello
Il primo passo per determinare la geometria del pannello è ricavare la lun-ghezza della missione ed i requisiti medi di potenza dei diversi sottosistemi. E’
ne-cessario individuare il pannello solare che meglio riesce a soddisfare questi requisiti al termine della vita operativa, naturalmente questo produce un eccesso di potenza all’inizio della missione che dev’essere dissipata in maniera opportuna per protegge-re l’intero sistema da rischi legati a corprotegge-renti, a voltaggi ed a temperatuprotegge-re troppo ele-vate.
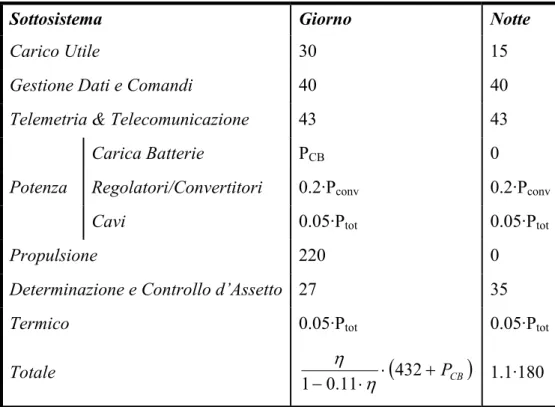
Per stimare la potenza che il pannello solare deve fornire si inseriscono le po-tenze dei vari sottosistemi ottenendo
(
+ + + + + +)
⋅η= ps ts pl c dhs t tcs ad cs pows
sa P P P P P P P
P & & &
10.5-1 Dove Pps è la potenza necessaria al sottosistema di propulsione, Pts è quella del sottosistema di controllo termico, Ppl necessaria al carico utile, Pc&dhs al sistema di gestione dei comandi e della memoria dati, Pt&tc al sistema di telemetria e teleco-mando, Pad&cs al sistema di controllo d’assetto, Ppow e quella dissipata dal sistema di generazione di potenza stessa o necessaria per la ricarica delle batterie e η rappresen-ta l’incertezza sugli ombreggiamenti del pannello, sull’effettiva degradazione e sull’effettiva intensità di radiazione catturata e l’incertezza sull’effettiva potenza ne-cessaria ai diversi sottosistemi e vale circa 1.155. Nella tabella 10.5-1 sono riportate le potenze necessarie ai vari sottosistemi utilizzate per definire la potenza complessi-va che dev’essere fornita dal pannello solare. Il passo successivo è stabilire la degra-dazione delle prestazioni del pannello dovuta alla radiazione che il pannello subisce, adoperando le grandezze definite nel paragrafo precedente. Normalmente le celle montano delle coperture scorrevoli, dei rivestimenti e dei riflettori per la superficie inferiore che ne migliorano il comportamento globale. La copertura scorrevole prov-vede una chiusura ermetica della cella sempre permettendo di ricevere la luce e di ri-lasciare calore. Può essere intessuta o piatta, il primo tipo è utilizzato per pannelli montati sul corpo del satellite e che non puntano attivamente verso il sole esse riflet-tono l’energia solare incidente all’interno della cella. Il secondo tipo è invece utiliz-zato per pannelli che puntano direttamente al Sole. Il rivestimento, invece, permette alla cella di usare una maggior parte della radiazione diminuendo le perdite per ri-flessione. Lo strato riflettente inferiore serve a riflettere indietro la radiazione che ha passato la cella e che non è stata assorbita.
tabella 10.5-1 Potenze assorbite dai vari sottosistemi in varie condizioni.
Sottosistema Giorno Notte
Carico Utile 30 15
Gestione Dati e Comandi 40 40
Telemetria & Telecomunicazione 43 43
Carica Batterie PCB 0
Regolatori/Convertitori 0.2·Pconv 0.2·Pconv
Potenza
Cavi 0.05·Ptot 0.05·Ptot
Propulsione 220 0
Determinazione e Controllo d’Assetto 27 35
Termico 0.05·Ptot 0.05·Ptot
Totale − ⋅ ⋅
(
432+PCB)
11 . 0 1 η η 1.1·180La potenza del controllo d’assetto è pensata utilizzando di giorno il sensore di Sole, di Notte il sensore di stelle e tipicamente solo una ruota di reazione, per quanto riguarda Pconv questa risulta essere la somma delle potenze dei vari sottosistemi.
La potenza all’inizio della vita operativa fornita dal satellite può essere, dun-que, espressa da β cos 0 ⋅ ⋅ = d BOL P I P 10.5-2 con P0 la potenza che può essere fornita da un particolare tipo di cella solare, Id sono le perdite inerenti di tabella 10.4-2 e β è l’angolo di incidenza solare definito in figura 10.2.2 Il valore di quest’angolo varia costantemente durante la vita, rendendo la potenza prodotta variabile a seconda del particolare momento. Si può allora consi-derare il valore medio su un’orbita
( )
t dt t P I P d t d d BOL = ⋅ ⋅ ⋅∫
⋅ 0 0 cos 1 β 10.5-3 con td il periodo dell’orbita trascorso al Sole con β<90°.Gli elettroni ed i protoni intrappolati nel campo magnetico terrestre sono la principale causa di degradazione delle celle solari. La degradazione dipende anche dal disegno della cella. Il parametro che viene utilizzato per quantificare la degrada-zione della cella durante la vita è Ld e dipende anche dai cicli termici, dagli impatti con micro-meteoriti, dal materiale in uscita dai propulsori e dal degassaggio dei ma-teriali in orbita.
(
)
anni della missioned radazione anno
L = 1−deg /
10.5-4 per cui la potenza alla fine della vita risulta
d BOL
EOL P L
P = ⋅
10.5-5 da cui si ottiene la superficie del pannello solare
EOL sa sa P P A = . 10.5-6 Il passo successivo è andare a cercare il numero delle celle in parallelo ed in serie che mi devono comporre il pannello; per fare ciò bisogna prima determinare il voltaggio e l’amperaggio prodotti dalla cella che sono influenzati dalla temperatura in funzione dei parametri di disegno αI ed αV , detti coefficienti di temperatura, se-condo le equazioni
(
)
[
]
s I D I A I mp T K K K I I = +α ⋅ −28 ⋅ ⋅ ⋅ 10.5-7(
)
[
]
V E V mp T K V V = +α ⋅ −28 ⋅ 10.5-8 in cui Imp e Vmp sono la corrente ed il voltaggio di massima potenza, KAI è il fattore di degradazione per la corrente dovuto all’assemblaggio, KDI è il fattore di degradazione per la corrente dovuto alla radiazione, KS è il fattore di intensità solare, include l’angolo d’incidenza , KEV è fattore di degradazione del voltaggio a causa delle radia-zioni.La temperatura del pannello può essere calcolata con le stesse formule deter-minate per calcolare la temperatura del corpo centrale
( )
(
(
)
( )
)
4 1 cos ⋅ + ⋅ ⋅ = σ ε ε β α b f t R t T 10.5-9 con R la radiazione incidente sulla superficie di fattore di assorbimento α, εf,bl’emettenza della superficie frontale e posteriore, da cui i pedici f e b e σ = 5.67·10-8 W/m2·K4 la costante di Boltzmann. Utilizzando il procedimento prima illustrato per la determinazione dell’angolo β(t), si divide il problema in tre parti, una tra Az0 = 0 ed , Azeclipse in cui il pannello riceve l’emissione infrarossa della terra, che varia tra 216 e 258 W/m², una tra Azeclipse ed Azback in cui il pannello riceve sulla faccia poste-riore la radiazione infrarossa della terra, la radiazione solare, con un valore medio di 1367 W/m² e la radiazione d’albedo terrestre ed una infine tra Azback e 2π- Azback in cui il pannello riceve la radiazione solare sulla faccia frontale e le altre due sulla fac-cia posteriore.
Poiché all’uscita dall’eclissi il pannello si trova ad una temperatura molto bassa la potenza prodotta è massima in questi istanti e scende all’aumentare della temperatura del pannello.
Il numero delle celle collegate in serie determina il voltaggio prodotto dal pannello, noto allora il voltaggio richiesto del BUS del sistema si possono determina-re il numero delle celle in serie
cella della voltaggio BUS del voltaggio di incremento BUS del voltaggio Ns = + 10.5-10 una volta noto il voltaggio della cella e l’incremento di voltaggio del BUS dovuto al diodo di isolamento che interviene per proteggere la stringa in caso di fenomeni di inversione della corrente, per esempio durante l’eclisse quando è il sistema di poten-za secondario a fornire corrente o quando si hanno fenomeni di ombreggiamento che interrompono la corrente prodotta dalla stringa. Infatti la perdita di una cella significa la perdita dell’intera stringa dato che le celle sono connesse in serie.
Il numero delle celle in parallelo è invece determinato dalla corrente necessa-ria al BUS BUS del Voltaggio Potenza IT = 10.5-11
10.5-12 con I la corrente prodotta dalla cella espressa dalla 10.5-7
10.6 Batterie
Come si osserva in tabella 10.4-3 la potenza che il pannello solare deve forni-re dipende dalla potenza di ricarica della batteria, per definiforni-re la quale bisogna, pri-ma, definire il tipo di batteria che viene utilizzato. Abbiamo visto nel paragrafo 10.1 che esistono principalmente tre tipi di batterie utilizzabili nello spazio; i primi due tipi di batteria quelle al Nichel Cadmio o al Nichel Idrogeno sono sicuramente meno costosi rispetto al terzo tipo, agli ioni di Litio, però i vantaggi portati da questo tipo di batterie rispetto ai precedenti per quanto riguarda una grande riduzione di massa e di volume occupato, una riduzione del numero complessivo delle celle, quindi della complicazione inerente del sistema di carica e scarica, la possibilità di montare ma-gnetometri per il controllo d’assetto, data l’assenza di materiale ferromagnetico negli elettrodi, la possibilità di operare a temperature più elevate, una prevedibile riduzione dei costi legati ad un maggiore sviluppo e utilizzo di queste tecnologie nel breve pe-riodo le rendono appetibili per il tipo di missione a cui dovrebbe essere adibito il no-stro sistema satellitare.
Il principio di funzionamento della cella agli Ioni di Litio è legato al lavoro di va-e-vieni di questi ultimi tra l’anodo ed il catodo durante la carica e la scarica. L’anodo è costituito da Carbonio (Grafite o Carbone) di catodi in commercio ce ne sono invece di più tipi formati da un composto di un ossido metallico con particelle di Litio come al LiCoO2, che è quello più largamente usato, al LiNiO2 ed al LiMn2O4 che sono di più recente introduzione, più economici e sicuri, anche se l’ultimo ha la tendenza a dare valori di capacità decrescente all’aumentare del numero di cicli. L’elettrolita è formata da sali di Litio (LiPF6, LiClO4) e da un solvente organico.
La cella lavora secondo le reazioni
2 1 2 6 6 1 CoO Li LiCoO xe xLi xe C xLi C Li x x + − + − + + → ← + + + + → ← + 10.6-1 I I N T p =
Altri vantaggi delle batterie agli ioni di Litio sono l’assenza di materiale in pressione ed il rischio zero di esplosione. Nella tabella 10.6-1 sono riportate le prin-cipali caratteristiche di una cella agli Ioni di Litio.
tabella 10.6-1 Dati batterie Li-Ion da [22]
Densità d’energia (Wh/kg) 125
Efficienza energetica(%) 96
Capacità garantita 38.6 Ah
Voltaggio medio a 15° 3.5 V
Voltaggio massimo di carica 4.1 V
Energia massima 140 Wh
Rendimento di Carica ηc 90%
Rendimento di scarica ηsc 90%
figura 10.6.1 Funzionamento cella Li-Ion
Una volta che è stata definito il tipo di cella, si passa a definire il voltaggio di lavoro del BUS del sistema. Normalmente, per piccoli satelliti in cui la potenza gene-rata non supera i 2 kW, come nel nostro caso, viene utilizzato un BUS a 28 V con convertitori ai carichi per portare il voltaggio a quello necessario. Una volta definito il voltaggio di sistema si va a determinare il numero delle celle che compongono la batteria. Supponendo la mancanza di una cella il numero complessivo delle celle che compongono la batteria di determina secondo l’equazione
(
cell)
cell d dBUS N V N V
V = −1 ⋅ − ⋅
con VBUS il voltaggio del BUS, Ncell il numero delle celle che vogliamo determinare, Vcell il voltaggio della cella, Nd il numero dei diodi di bypass e Vd il salto di voltaggio ai capi del diodo.
La batteria deve fornire la potenza notturna, Pe, del satellite nel periodo in cui il pannello è in eclisse, te, la capacità richiesta alla batteria è allora
DOD V t P C BUS sc e e ⋅ ⋅ ⋅ = η 10.6-3 con DOD la profondità di scarica relativa al particolare tipo di cella ed ηsc il rendi-mento di scarica.
Sapendo il voltaggio massimo di carica della cella, Vcarica, supponendo che la rottura della cella durante la ricarica sia bypassata attraverso tre diodi collegati tra di loro in serie ed in parallelo alla cella possiamo determinare il massimo voltaggio di ricarica
(
Ncell)
Vcarica VdcVmax = −1 ⋅ −3⋅
10.6-4 con Vdc il salto di potenziale ai capi del diodo di protezione durante la ricarica.
Il passo successivo è la determinazione della corrente di ricarica della batte-ria. Sapendo che il tempo di ricarica della batteria segue la formula
d c CB e e ric t P t P t ≤ ⋅ ⋅ = η 10.6-5 con ηc l’efficienza di ricarica e td il tempo in cui il pannello produce potenza ed im-ponendo che
c
CB V I
P = max ⋅
10.6-6 si ricava che la corrente necessaria alla ricarica dev’essere
d c e e c t V t P I ⋅ ⋅ ⋅ ≥ η max 10.6-7
A questo punto si calcola la potenza necessaria alla ricarica della batteria dal-la 10.6-6, ovvero dal-la potenza che il pannello deve fornire, e daldal-la 10.6-7 l’area del pannello solare.
10.7 Controllo e regolazione della potenza
La configurazione del pannello solare è stata disegnata per lavorare in un cer-to puncer-to operativo alla fine della vita operativa con una certa corrente ed un cercer-to voltaggio di massima potenza. In qualunque condizione si trovi durante la missione il pannello provvederà un eccesso di potenza ed il punto operativo si sposterà nella zo-na di alto voltaggio della curva I-V riportata in figura 10.4.1. A seconda che si tenga il voltaggio o la corrente costante l’altra variabile avrà una grande escursione. Dob-biamo porre un sistema collegato al BUS che trovi un punto ottimale di funziona-mento sulla curva I-V e che comunque fornisca la corrente ed il voltaggio richiesti.
I due tipi principali di controllo sono il peak-power tracker, tracciatore di po-tenza di picco, (PPT) ed il direct-energy-transfer, trasferimento diretto di energia, (DET). Il sistema PPT è un controllo non dissipativo che estrae l’esatta potenza di cui il sistema ha bisogno in quel momento. E’ costituito da un convertitore dc-dc che opera in serie con il pannello solare cambiando dinamicamente il punto operativo della sorgente e tracciando il punto di picco di potenza quando l’energia richiesta lo supera. Permette al voltaggio fornito dal pannello di superare il suo massimo quindi trasforma la potenza in ingresso in una equivalente in uscita, ma ad un voltaggio ed una corrente diversi. Poiché si trova in serie col pannello ha un utilizzo del 4-7% del-la potenza totale. Un sistema PPT ha un vantaggio se utilizzato in missioni al di sotto dei 5 anni. Il sistema DET è invece un sistema dissipativo in quanto dissipa la poten-za in eccesso non utilizpoten-zata dai carichi; la dissipazione può essere fatta a livello di pannello solare o attraverso banchi esterni di regolatori a derivatore per proteggere il sistema da un’elevata dissipazione interna. Il DET utilizza un sistema di regolazione a derivatore che mantiene il voltaggio ad un livello predeterminato. Il regolatore a derivazione opera in parallelo col pannello solare e porta la corrente via dal sistema quando i carichi o la ricarica della batteria non richiedono potenza. Questo tipo di controllo è estremamente efficiente ed ha il vantaggio di avere poche parti, una bassa massa ed un’efficienza EOL più elevata. Dato che è stato assegnato un voltaggio di 28 V al BUS di sistema, dato che la missione ricerca semplicità ed una durata supe-riore ai 5 anni il sistema DET viene scelto per controllare il sistema elettrico.
Esistono tre categorie di sistema di controllo del voltaggio e della potenza e-lettrica: non regolato, parzialmente regolato e pienamente regolato. Il primo ha un voltaggio del BUS che varia significativamente tra la carica e la scarica della
batte-ria. Nel sistema parzialmente regolato abbiamo un controllo del voltaggio durante la carica della batteria, un caricatore è posto in serie con ogni batteria Questo sistema è poco efficiente. Il sistema pienamente regolato è molto inefficiente, ma viene utiliz-zato in satelliti che richiedono poca potenza ed un voltaggio molto accurato, adopera controllori di carica e di scarica. Dato che i carichi, che richiedono correnti e voltaggi diversi, sono collegati al BUS tramite convertitori dc-dc, il sistema non necessita di un controllo particolare sul voltaggio, il voltaggio e la corrente opportuna vengono prodotti all’ingresso al carico, per tanto il sistema è non regolato.
L’ultimo problema riguarda il modo di carica delle batterie. Queste ultime possono venir caricate individualmente o in parallelo. Il secondo modo è quello più semplice, di minor costo, ma non permette una flessibilità al sistema è può altresì stressare le batterie diminuendone la vita operativa. Questo perché quando caricate in parallelo le batterie hanno uguale voltaggio, ma diversa corrente e temperatura, quando la carica non è regolata una batteria può ricevere tutta la corrente disponibile. Un sistema di carica in parallelo è adeguato per missioni sotto i 5 anni, allora per il nostro sistema bisogna prendere in considerazione la carica individuale attraverso un controllo lineare della corrente di carica (LC³) posto in serie con le batterie, che ne ottimizza l’uso. Questo tipo di sistema, però, aggiunge un’impedenza, parti elettroni-che ed una dissipazione termica non presenti in un sistema in parallelo.
10.8 Configurazioni analizzate
Per mantenere una semplicità costruttiva del pannello sono state trascurate le configurazioni con pannelli dispiegabili tipo a pantografo o quelle più moderne con materiali cosiddetti gonfiabili. In più per un utilizzo più razionale della superficie la-terale viene ovvio utilizzare la superficie superiore per posizionarvi un pannello fis-so. La prima configurazione, che è anche la più semplice è riportata in figura 10.8.1. I pannelli all’atto del lancio sono richiusi sulle superfici laterali del satellite, di sezio-
figura 10.8.1 Configurazione pannelli solari numero 1
ne esagonale perfetta, come nella parte sinistra della figura. Vengono poi aperti all’atto dell’ingresso nell’orbita nominale, attraverso opportuni meccanismi, fino a posizionarsi con un angolo tra la normale ortogonale al pannello e la posizione del Nadir di 180° e con il vettore direzione del polo orbitale di 90°. Dato che il satellite vede il Sole spostarsi rispetto al piano orbitale come nel grafico di figura 10.8.2, il pannello produce un eccesso di potenza durante gli equinozi, in cui abbiamo il pas-saggio allo zenit, ed una potenza più bassa ai solstizi in cui l’angolo col sole massi-mo raggiunge i 20.6°. Il grafico dell’angolo col Sole medio calcolato mediando il va-lore ottenuto con la 10.2-9 rispetto al periodo in cui il sole rimane in vista alla faccia superiore del pannello t(β≤90), espresso come
(
)
( )
( )∫
≤ ⋅ ≤ = 90 0 90 1 β β β β t t dt t , 10.8-1 è riportato in figura 10.8.3. Noto questo andamento si può passare ad analizza-figura 10.8.2 Analisi dei tempi d’eclisse per il satellite
figura 10.8.3 Angolo di vista del Sole medio giornaliero per pannello con γ = 90° re l’area necessaria a produrre tutta la potenza richiesta dal sistema attraverso la for-mula
fisso ala ala sa A P P P = 2⋅ ⋅ + 10.8-2 in cui Pala e Pfisso sono le potenze per unità di superficie medie giornaliere che, le cel-le poste sull’ala e quelcel-le poste sulla superficie del corpo, riescono a fornire in condi-zioni EOL, con l’ipotesi che il pannello fisso abbia una superficie di 1 m². Il pannello dovrebbe avere, allora, una superficie attiva, durante i solstizi, di circa 6.7 m², in-compatibile coi limiti di superficie laterale imposti dalla configurazione geometrica.
Per cercare di ovviare a questo problema numerose sono le configurazioni proposte. Un nuovo gruppo di configurazioni propongono di dare un movimento alle due ali per cercare di catturare quanta più radiazione possibile. Configurazione e tipo di movimento sono mostrati in figura 10.8.4. Si può pensare di produrre un movi-mento fino ad avere un passaggio giornaliero del Sole allo zenit. In questo caso la legge di moto dell’angolo γ definito in figura 10.2.2 è
'
s
β
γ =
10.8-3 con βs’ definito dalla 10.6-2. Se da un canto questo tipo di ragionamento fornisce un guadagno enorme dal punto di vista della riduzione della superficie del pannello so-lare, il massimo, che si ha in questo caso, agli equinozi, vale 1.8 m², dall’altro si ha un problema di geometria.
figura 10.8.4 Configurazione dotata di meccanismi di movimento del pannello Infatti la rotazione massima dovrebbe essere ±69.4°, ma la geometria del sa-tellite ad esagono perfetto permette la rotazione solo fino a 60°. Il fatto che il massi-mo della superficie del pannello si ottenga agli equinozi è giustificato dal fatto che, in questi punti celesti, il tempo di ricarica della batteria risulta essere la metà del pe-riodo orbitale come si può vedere in figura 10.8.5 Al contrario ai solstizi il tempo di
ricarica risulta essere il tempo che il satellite rimane al Sole, per il quale si veda figura 10.8.2.
figura 10.8.5 Tempo al Sole per la configurazione mobile del pannello
Le formule 10.6-6 e 10.6-7 ci dimostrano che la potenza necessaria alla rica-rica della batteria è proporzionale al tempo di eclissi: maggiore è il tempo, maggiore è la potenza necessaria alla ricarica, maggiore è la potenza che il pannello solare de-ve fornire. Ulteriori limitazioni a questo tipo di configurazione sono il fatto che non viene sfruttata interamente la superficie laterale e si crea una notevole potenza da dissipare. Per annullare la potenza da dissipare, ovvero per produrre ogni giorno l’esatto valore di potenza necessario, l’angolo di rotazione dev’essere limitato a ±28°, seguendo, comunque, durante l’anno il moto del Sole secondo la legge
( )
28 180 max 2 π β β π γ = − ⋅ ⋅ s s 10.8-4 Anche questo tipo di configurazione ha il problema di un non ottimale utiliz-zo della superficie laterale. Per avere un pannello con superficie laterale di 3 m² l’angolo di rotazione dev’essere limitato a ±17 gradi con legge di moto analoga alla 10.8-4.Tutto questo gruppo di configurazioni è affetto da un ulteriore limite che è quello di dover imbarcare un meccanismo che permetta il movimento delle ali e l’elettronica di controllo, che oltre ad essere un’aggravante dal punto di vista del
so imbarcato, servendone due per ogni ala per questioni di ridondanza portano un pe-so di circa 20 kg (dati del meccanismo SADM della francese Alcatel), è anche un problema dal punto di vista della complicazione del sistema e della diminuzione di affidabilità.
Una possibile soluzione a questo problema sarebbe porre il satellite nelle condizioni proposte nella prima configurazione e dotare il satellite nel suo complesso di un movimento di rollio attorno all’asse X. In questo caso l’angolo di ottimo avreb-be un’ulteriore diminuzione assestandosi intorno a ±16 gradi. Il problema di questa soluzione è la necessità di modificare il sistema di specchi del carico pagante per modificarne l’angolo massimo da 30 gradi a circa 45 che è una cosa non semplice da attuare.
figura 10.8.6 Configurazione finale 1
L’unica soluzione risulta essere quella di aumentare la superficie del pannello ripiegandolo più volte attorno alla superficie del satellite cosa che, in due varianti, è rappresentata dalle figura 10.8.6 e figura 10.8.7. Queste due configurazioni sono sta-te pensasta-te ragionando sulla superficie mancansta-te al primo modello. La posta-tenza pro-dotta ai solstizi in quella configurazione è stata vista essere molto limitata a causa dell’angolo medio col sole molto piccolo, che si traduce in una mancanza di circa 2.8 m² di superficie. Si può vedere che il periodo in cui la superficie deve essere maggio-re di 3 m² è molto limitata attorno ai solstizi, allora risulta ovvio posizionamaggio-re un pan-nello di massima efficienza ai solstizi, cioè con passaggio del Sole allo zenit durante questi periodi, collegato al resto dell’ala oppure che si apra in un momento successi-vo all’ala principale verso il basso. Questa configurazione produce tutta la potenza di cui il satellite ha bisogno, imponendo che la ricarica della batteria sia completata nel periodo in cui il pannello principale è al Sole. Un altro accorgimento, oltre a quello di completare la ricarica nel semiperiodo è di utilizzare il propulsore, principale uti-lizzatore della potenza elettrica, al centro del passaggio del Sole sul pannello in mo-do da sfruttare la massima potenza promo-dotta. Entrambe le configurazioni, ma princi-palmente quella riportata in figura 10.8.6, risentono di un fastidioso problema di om-breggiamento del pannello inferiore, che si traduce in una perdita di funzionamento dopo un più o meno breve periodo. Per la prima configurazione proposta, col pannel-lo in zona inferiore il funzionamento è limitato a circa tre mesi, corrispondenti al pe-riodo in cui il Sole si trova con un angolo di elevazione compreso tra 69.7° e 90°. Questa è una frazione di tempo molto minore rispetto a quello di lavoro del pannello di figura 10.8.7 in cui la potenza viene prodotta per più di sei mesi prima di entrare in eclisse. Questo effetto non è completamente positivo in quanto la potenza prodotta dal pannello superiore risulta, in condizioni di equinozio, già ampiamente superiore a quella richiesta dal sistema, appare chiaro come, in questo caso, si abbia una maggior energia da dissipare. Svantaggio compensato dal fatto che i pannelli di estremità re-stano in vista al Sole per un periodo superiore alla metà della vita, quando, nella con-figurazione coi pannelli ventrali, il tempo in vista si riduce a circa ¼ della vita, che non è una buona scelta, sembra inutile dover imbarcare così tanta massa per un uti-lizzo così limitato. Per stabilire ulteriori vantaggi o svantaggi si possono analizzare le coppie di disturbo prodotte dalla resistenza aerodinamica e dalla pressione di radia-zione. Il pannello inferiore ha il vantaggio di creare una maggior coppia di disturbo rispetto all’asse z, dovuta alla resistenza atmosferica, il braccio è maggiore, ma in di-rezione opposta a quella prodotta dall’ala superiore, scaricando la ruota di reazione. Nulla si può dire a priori sulla coppia prodotta dalla radiazione solare che viene ri-cercata imponendo il centro di pressione al centro del pannello, il centro di gravità al centro dell’esagono di lato 55 cm, ed osservando che la componente principale della pressione di radiazione solare è quella dovuta alla parte assorbita. Per quanto
riguar-da la coppia prodotta riguar-dalla resistenza si parla di coppia per unità di spessore, in quan-to non viene svolquan-to un disegno particolareggiaquan-to della struttura di supporquan-to del pan-nello. La resistenza viene calcolata attraverso la 4.4-1 con B = m / CD ·l, l larghezza del pannello e CD = 3.
tabella 10.8-1 Coppie di disturbo prodotte dalle due configurazioni.
Pannello estremo sup.
Pannello estremo inf.
Coppia per radiazione Solare max.
N·m 6.6857·10
-6 6.0890·10-6
Coppia per radiazione Solare min.
N·m 6.6137·10
-22 3.8909·10-6
Coppia per radiazione Solare med.
N·m 9.0978·10
-6 1.0485·10-5
Coppia data da Resistenza max. ala
N·m/m 1.1946·10
-6
Coppia data da Resistenza max N·m/m 2.7073·10-7 -3.8632·10-7 Coppia data da Resistenza min. ala
N·m/m 3.7755·10
-7
Coppia data da Resistenza min N·m/m 8.5561·10-8 -1.2209·10-7
Possiamo osservare come le coppie prodotte dalla radiazione solare siano mediamente le stesse ed anche siano le stesse in quanto a valore massimo. Per quanto riguarda la resistenza aerodinamica, invece, il pannello di estremità montato in ala aggiunge circa 1/4 della resistenza prodotta dall’ala orizzontale quando il pannello montato inferiormente ne toglie circa 1/3, ma è un effetto di gran lunga trascurabile essendo di due o tre ordini di grandezza inferiore rispetto agli altri, dipende dallo spessore del sostrato di alluminio a cui sono incollate le celle. Non avendo riscontra-to vantaggi per quanriscontra-to riguarda le coppie di disturbo la configurazione scelta risulta, allora, quella riportata in figura 10.8.7. In tabella 10.9-2 sono riportate le caratteristi-che principali di questo generatore di potenza e nelle figure seguenti le caratteristicaratteristi-che di potenza prodotta e di illuminazione relativamente a sei mesi, ed in ultimo uno schema elettrico del sistema.
Data la criticità di questo tipo di configurazione è necessario studiare più ap-profonditamente le dimensioni dei vari pannelli. Si riesce a rendere la potenza media prodotta durante i solstizi sufficientemente vicina a quella necessaria ipotizzando che i sistemi di dispiegamento 6 cm x 3 m di superficie sui pannelli in ala, lasciando libe-ri il pannello di estremità, di dimensioni 3 x 0.55 m, ed il pannello supelibe-riore di di-mensioni 2.7 x 0.55 m. Per cui si lascia uno spazio 30 cm x 55 cm dove alloggiare sensori che devono affacciarsi verso lo spazio esterno. Rispetto ad una configurazio-ne mobile si ha un appesantimento dovuto alla presenza di circa 3 m² in più rispetto alle configurazioni mobili, ma col vantaggio di poter imbarcare 6 molle di torsione o meccanismi a memoria di forma di circa 200 g l’una al posto di 4 motori con elettro-nica da circa 5 kg l’uno. Vantaggio anche dal punto di vista del costo.
Per ciò che concerne la struttura di supporto al pannello, si pensa ad uno stra-to di honeycomb di alluminio dello spessore di 2 cm incollastra-to posteriormente. Sa-pendo una densità per questa struttura di 80 kg/m3 è facile determinarne il peso com-plessivo.
figura 10.8.9 Angolo di elevazione.
L’angolo di elevazione aumenta per il pannello centrale in quanto il Sole non ha più passaggi allo Zenit, diminuisce/aumenta per il pannello con passaggio del Sole allo Zenit in
quel-lo/successivo Solstizio
figura 10.8.10 Tempo al Sole
Il tempo al Sole del pannello centrale è costante pari a metà del periodo, per uno dei due pannel-li di estremità aumenta per l’altro diminuisce fino a essere nullo, poiché sempre in opposizione.
figura 10.8.11 Potenza del pannello.
La potenza del pannello centrale diminuisce perché aumenta l’angolo di elevazione, la potenza del pannello di estremità con passaggio del Sole allo Zenit in quel Solstizio aumenta perché aumenta il tempo al Sole e diminuisce l’angolo di elevazione, la potenza prodotta dal pannello con passaggio allo Zenit nel Solstizio successivo diminuisce fino a sparire quando il
pannello entra nel periodo di eclissi.
10.9 Meccanismi per il dispiegamento
Tralasciando, per le complicazioni prima osservate, tutti i dispositivi per la rotazione del pannello, la scelta del meccanismo per il dispiegamento dei pannelli all’atto dell’acquisizione dell’orbita nominale è quasi obbligata. Il movimento dei pannelli è assicurato da una coppia di molle di torsione alle due estremità del pannel-lo, per simmetria e per ridondanza. Una di queste coppie viene utilizzata per rendere solidale il pannello superiore esterno al pannello superiore interno, che è il primo movimento di apertura. Un’altra coppia per rendere il pannello superiore piatto, un’ultima coppia per l’apertura, successiva, del pannello inferiore. Vengono utilizzati interruttori pirotecnici per tagliare i tiranti che bloccano il pannello nella configura-zione del lancio. Servono una coppia di interruttori pirotecnici per ogni tirante. Il numero totale delle molle di torsione per l’apertura dei pannelli risulta essere di do-dici, come il numero totale degli interruttori pirotecnici. In tabella 10.9-1 sono ripor-tate alcune delle caratteristiche di questi due dispositivi date da [23].
tabella 10.9-1 Caratteristiche principali dei meccanismi di dispiegamento. (Dati Alcatel)
Proprietà Molla di Torsione Interruttore Pirotecnico
Peso 210 g 200 g circa
tabella 10.9-2 Grandezze caratteristiche del sistema di Potenza
Tempo di ricarica della batteria 45.15 min (50% del Periodo)
Capacità di lavoro della Batteria 29.82 Ah
Intensità di corrente di ricarica 6.9318 A
Potenza di ricarica della Batteria 244.00 W
Potenza necessaria 892.32 W
Equinozio Solstizio Est. Solstizio Inv.
Potenza Totale Prodotta 1569.9 W 894.0 894.0
Temperatura massima Generatore Solare 80°C 53°C
Corrente massima prodotta da una Cella del PS 0.2767 A 0.0886 A
Corrente massima prodotta da una Cella del PdE 0.0896 A 0.3544 A 0 A
Voltaggio minimo prodotta da una Cella del PS 1.8640 V 2.0394 V
Voltaggio minimo prodotto da una Cella del PdE 1.8640 V 2.0394 V
Componente Legge di massa Peso [kg] (unità singola)
Pannello Solare 2.36·A 26.0
Supporto 80·A·t 15.9
Batteria C·V/126 10 (5)
Regolatori e Convertitori 0.025·P 39.4
Cavi 0.04·Msat 16
tabella 10.9-3 Pro e contro della scelta effettuata
Scelta Effettuata Vantaggi Svantaggi
Cella a giunzione tri-pla
• Maggior rendimento
• Minor decadimento delle prestazioni nel tempo
• Minor sensibilità alla temperatura
• Costo maggiore • Peso specifico per
u-nità di potenza mag-giore
Cella agli ioni di Li
• Campo di temperatura di utilizzo più ampio
• Minor peso specifico • Maggior capacità • No effetti di memoria
• Possibilità di utilizzo di sensori ma-gnetici • No rischio di esplosione Costo maggiore Modo di controllo DET • Basso peso • Semplicità costruttiva • Efficienza elevata Controllo dissipativo
Potenza non regolata Efficienza massima Voltaggio varia grande-mente
Configurazione di figura 10.8.7
• Potenza media prodotta al minimo u-guale alla potenza medio/massima ne-cessaria
• Semplicità costruttiva
o Grande massa o Blocca le dimensioni






![tabella 10.6-1 Dati batterie Li-Ion da [22]](https://thumb-eu.123doks.com/thumbv2/123dokorg/5659201.70947/18.892.175.792.274.794/tabella-dati-batterie-ion.webp)