23
CAPITOLO 2
ANDAMENTO PLANIMETRICO DELL’ASSE STRADALE
2.1 Tipo di infrastruttura scelta
Conformemente a quanto previsto all’art.2 del “Codice della strada” le strade sono classificate, riguardo alle loro caratteristiche costruttive, tecniche e funzionali, nei seguenti tipi:
A- Autostrade (extraurbane e urbane) B- Strade extraurbane principali C- Strade extraurbane secondarie D- Strade urbane di scorrimento E- Strade urbane di quartiere
F- Strade locali (extraurbane e urbane)
Ad ogni categoria di strada è associata una propria geometria ed un proprio intervallo di velocità di progetto.
2.1.1 La scelta del tipo di strada
Nel presente studio è stata scelta una strada di categoria C (più precisamente C2) costituita da due corsie, una per senso di marcia, di 3,50m ciascuna e da banchine di 1,25m (Figura 2.1), le caratteristiche base per la progettazione e l’adeguamento a C2 sono riportate nel D.M. 5 Novembre 2001 “Norme funzionali e geometriche per la costruzione
24
delle strada” e possono essere sintetizzate nelle tabelle 2.1 e 2.2 tratte dal decreto.
L’intervallo della velocità di progetto associato a questa strada è compreso tra 60 e 100 km/h.
Questo range rappresenta le massime velocità che i veicoli possono mantenere, con sicurezza, in ogni punto, quando la velocità è limitata dalla sola geometria. La Vpmax=100Km/h è la velocità che si può tenere in piano e in rettifilo, la Vpmin=60Km/h è la velocità con cui si progettano gli elementi geometrici più vincolanti.
25
26
27
2.2 Distanze di visibilità
L’esistenza di opportune visuali libere costituisce primaria ed inderogabile condizione di sicurezza della circolazione.
Per distanza di visuale libera si intende la lunghezza del tratto di strada che il conducente riesce a vedere davanti a sé senza considerare l’influenza del traffico, delle condizioni atmosferiche e di illuminazione della strada. Lungo il tracciato stradale la distanza di visuale libera deve essere confrontata, in fase di progettazione, con le seguenti distanze:
• Distanza di visibilità per l’arresto: è pari allo spazio minimo
necessario perché un conducente possa arrestare il veicolo in condizione di sicurezza davanti ad un ostacolo imprevisto. Tale distanza è data dalla somma dello spazio di frenatura S e dello spazio percorso alla velocità V iniziale durante il tempo τ detto “tempo complessivo di reazione” che è necessario al conducente per percepire la presenza dell’ostacolo e per mettere in azione i freni. Per il tempo complessivo di reazione si assumono valori linearmente decrescenti con la velocità da 2,6s per 20km/h, a 1,4s per 140km/h, in considerazione dell’attenzione più concentrata alle alte velocità.
τ = (2,8-0,01V) (s) con V in km/h
Detta Da la distanza di visibilità per l’arresto, questa è data dalla relazione seguente: (1) (m)
( )
( )
∫
+ + ⎥⎦ ⎤ ⎢⎣ ⎡ ± ⋅ − ⋅ = + = 1 0 0 2 0 2 1 100 6 . 3 1 6 . 3 V V a l A dV V r m R i V f g V V D D D τ28
dove,
D1 = spazio percorso nel tempo (m) D2 = spazio di frenatura (m)
V0 = velocità del veicolo all’inizio della frenatura (km/h)
V1 = velocità finale del veicolo, in cui V1= 0 in caso di arresto (km/h) i = pendenza longitudinale del tracciato (%)
τ = tempo complessivo di razione (s) g = accelerazione di gravità (m/s2) Ra = resistenza aerodinamica (N) m = massa del veicolo (Kg)
fl = quota limite del coefficiente di aderenza impegnabile
longitudinalmente per la frenatura
r0= resistenza unitaria al rotolamento, trascurabile (N/kg) Con riferimento ad un’autovettura media:
Per i valori di fl possono adottarsi le due serie di valori di seguito riportate, una relativa alle autostrade e l’altra valida per tutti gli tipi di strade (tab. 2.3). Tali valori sono compatibili anche con superficie stradale leggermente bagnata (spessore del velo idrico di 0,5 mm).
Tab. 2.3: Coefficienti di aderenza longitudinale proposti dalle Norme CNR
2 5 10 61 . 2 V m Ra ⋅ ⋅ = −
29
• Distanza di visibilità per il sorpasso [m]: è pari alla lunghezza
del tratto di strada occorrente per compiere una manovra di completo sorpasso in sicurezza, quando non si possa escludere l’arrivo di un veicolo in senso opposto. In presenza di veicoli marcianti in senso opposto la distanza di visibilità completa per il sorpasso si valuta con la seguente espressione:
dove:
v (m/s) oppure V (km/h) è la velocità di progetto desunta puntualmente dal diagramma della velocità ed attribuita uguale sia per il veicolo sorpassante che per il veicolo proveniente dal senso opposto
Le distanze di visibilità da verificare dipendono dal tipo di strada in progetto e dall’elemento di tracciato considerato.
Indipendentemente però dal tipo di strada e dall’ambito (extraurbano o urbano), lungo tutto il tracciato deve essere assicurata la distanza di visibilità per l’arresto in condizioni ordinarie o con tempi di reazione maggiorati.
Nelle strade extraurbane ad unica carreggiata con doppio senso di marcia (come il tipo C e F), la distanza di visibilità per il sorpasso deve essere garantita per una conveniente percentuale di tracciato, in misura comunque non inferiore al 20%.
Nei tratti di carenza di visibilità per il sorpasso, tale manovra deve essere interdetta con apposita segnaletica. Ai fini delle verifiche delle visuali libere, la posizione del conducente deve essere sempre considerata al centro della corsia da lui impegnata, con l’altezza del suo occhio a m. 1,10 dal piano viabile.
V v
30
Nella valutazione della distanza di visibilità per l’arresto, l’ostacolo va collocato a m. 0,10 dal piano viabile e sempre lungo l’asse della corsia del conducente.
Nel caso della distanza di visibilità per il sorpasso, l’ostacolo mobile va collocato nella corsia opposta, con altezza pari a m. 1,10.
2.3 Elementi del tracciato planimetrico
2.3.1 RettifiliLa lunghezza massima dei rettifili è stata mantenuta, lungo tutto il tracciato, inferiore al valore LR= 22·Vpmax (m) dove Vpmax è il limite superiore dell’intervallo di velocità di progetto della strada, in km/h. Questo limite risponde alla necessità di evitare il superamento delle velocità consentite, la monotonia, la difficile valutazione delle distanze e di ridurre l’abbagliamento nella guida notturna.
Di contro un rettifilo, per poter essere percepito come tale dall’utente, deve avere una lunghezza non inferiore ai valori riportati nella Tabella 2.4; per velocità si intende la massima desunta dal diagramma di velocità per il rettifilo considerato.
Tab. 2.4
V (Km/h) 40 50 60 70 80 90 100 110 120 130 140
31
Tra un rettifilo di lunghezza LR ed il raggio più piccolo fra quelli delle
due curve collegate al rettifilo stesso, anche con l’interposizione di una curva a raggio variabile, deve essere rispettata la condizione che riguarda i criteri di composizione del tracciato:
R > LR per LR < 300m
R ≥ 400m per LR ≥ 300m
TRATTO 4-5 (ALTERNATIVA 1) Non sono presenti rettifili
TRATTO 4-5 (ALTERNATIVA 2) Sez. 39-57 :
♦ LR = 1321.47m < Lmax = 2200m
♦ Vmax = 100 Km/h => Lmin = 150m ; LR > Lmin ♦ Raggio iniziale = 600m
32
TRATTO 5a-7 Sez. 0-3 :
♦ LR = 217.94m < Lmax = 2200m
♦ Vmax = 100 Km/h => Lmin = 150m ; LR < Lmin
La lunghezza LR non sarebbe sufficiente ma siamo in prossimità di un intersezione a rotatoria pur cui si accetta questo valore.
♦ Raggio iniziale = /
Raggio finale = 400m R > LR per LR < 300m Sez. 20-21 :
♦ LR = 32.00m < Lmax = 2200m
♦ Vmax = 95 Km/h => Lmin = 132.5m ; LR < Lmin
Nel caso di clotoide di flesso è possibile inserire un tratto rettilineo di lunghezza non superiore a:
In questo caso non vale quindi il requisito di lunghezza minima riportato nella tabella 2.3.
♦ Raggio iniziale = 400m
Raggio finale = 200m R > LR per LR < 300m Sez. 86-91 :
♦ LR = 1050.45m < Lmax = 2200m
♦ Vmax = 100 Km/h => Lmin = 150m ; LR > Lmin ♦ Raggio iniziale = 450m
Raggio finale = 600m R ≥ 400m per LR ≥ 300m
5 . 12 2 1 A A L= +
33
Nei tratti successivamente analizzati non saranno sempre rispettate le verifiche sui criteri di composizione del tracciato essendo questi dei tratti soggetti a progettazione di adeguamento e non di progettazione in senso stretto.
TRATTO 7-8 Sez. 1-7 :
♦ LR = 957.13m < Lmax = 2200m
♦ Vmax = 100 Km/h => Lmin = 150m ; LR > Lmin ♦ Raggio iniziale = /
Raggio finale = 350m R ≥ 400m per LR ≥ 300m Sez. 19-28 :
♦ LR = 945.53m < Lmax = 2200m
♦ Vmax = 100 Km/h => Lmin = 150m ; LR > Lmin ♦ Raggio iniziale = 350m
Raggio finale = 450m R ≥ 400m per LR ≥ 300m Sez. 32-36 :
♦ LR = 451.33m < Lmax = 2200m
♦ Vmax = 100 Km/h => Lmin = 150m ; LR > Lmin ♦ Raggio iniziale = 450m
34
Sez. 41-45 :
♦ LR = 235.91m < Lmax = 2200m
♦ Vmax = 100 Km/h => Lmin = 150m ; LR > Lmin ♦ Raggio iniziale = 450m
Raggio finale = 450m R ≥ LR per LR ≤ 300m
Sez. 53-59 :
♦ LR = 389.84m < Lmax = 1980m
♦ Vmax = 90 Km/h => Lmin = 115m ; LR > Lmin ♦ Raggio iniziale = 450m
Raggio finale = 250m R ≥ 400m per LR ≥ 300m Sez. 64-65 :
♦ LR = 105.65m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 250m
Raggio finale = 120m R ≥ LR per LR ≤ 300m Sez. 69-70 :
♦ LR = 44.55m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120m
35
Sez. 74-75 :
♦ LR = 258.85m < Lmax =1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 1200m
Raggio finale = 200m R ≥ LR per LR ≤ 300m
TRATTO 8-9 Sez. 0-1 :
♦ LR = 100.42m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = /
Raggio finale = 120m R ≥ LR per LR ≤ 300m Sez. 11-13 :
♦ LR = 184.00m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120
Raggio finale = 200m R ≥ LR per LR ≤ 300m Sez. 39-41 :
♦ LR = 65.53m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120m
36
Sez. 47-48 :
♦ LR = 10.70m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR < Lmin
Nel caso di clotoide di flesso è possibile inserire un tratto rettilineo di lunghezza non superiore a:
In questo caso non vale quindi il requisito di lunghezza minima riportato nella tabella 2.3.
♦ Raggio iniziale = 120m
Raggio finale = 120m R > LR per LR < 300m Sez. 52-55 : (Ponte)
♦ LR = 22.97m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120m
Raggio finale = 120m R ≥ LR per LR ≤ 300m Sez. 58-59 :
♦ LR = 78.52m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120m
Raggio finale = 200m R ≥ LR per LR ≤ 300m Sez. 66-70 :
♦ LR = 228.68m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120m
Raggio finale = 120m R ≥ LR per LR ≤ 300m
5 . 12 2 1 A A L= +
37
Sez. 79-80 :
♦ LR = 67.84m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120m
Raggio finale = 200m R ≥ LR per LR ≤ 300m Sez. 83-88 :
♦ LR = 386.43m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 200m
Raggio finale = 200m R ≥ 400 per LR ≥ 300m Sez. 91-92 :
♦ LR = 59.58m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 200m
Raggio finale = 120m R ≥ LR per LR ≤ 300m Sez. 96-97 :
♦ LR = 101.49m < Lmax = 1848m
♦ Vmax = 84 Km/h => Lmin = 102m ; LR > Lmin ♦ Raggio iniziale = 200m
38
Sez. 106-109 :
♦ LR = 617.52m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 200m
Raggio finale = 200m R ≥ 400m per LR ≥ 300m Sez. 120-122 :
♦ LR = 323.08m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120m
Raggio finale = 150m R ≥ 400 per LR ≥ 300m Sez. 134-136 :
♦ LR = 135.72m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 150m
Raggio finale = 120m R ≥ LR per LR ≤ 300m Sez. 141-144 :
♦ LR = 492.25m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120m
39
Sez. 153-157 :
♦ LR = 409.85m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120m
Raggio finale = 120m R ≥ 400m per LR ≥ 300m Sez. 160-162 :
♦ LR = 366.24m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120m
Raggio finale = 120m R ≥ 400m per LR ≥ 300m Sez. 167.169 :
♦ LR = 272.83m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120m
Raggio finale = 120m R ≥ LR per LR ≤ 300m Sez. 174-175 :
♦ LR = 173.73m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120m
40
TRATTO 9-10 Sez. 1-3 :
♦ LR = 143.90m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = /
Raggio finale = 120m R ≥ LR per LR ≤ 300m Sez. 7-10 :
♦ LR = 78.91m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 120m
Raggio finale = 200m R ≥ LR per LR ≤ 300m Sez. 13-14 :
♦ LR = 9.78m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR < Lmin
Nel caso di clotoide di flesso è possibile inserire un tratto rettilineo di lunghezza non superiore a
In questo caso non vale quindi il requisito di lunghezza minima riportato nella tabella 2.3.
♦ Raggio iniziale = 200m
Raggio finale = 400m R > LR per LR < 300m
5 . 12 2 1 A A L= +
41
Sez. 19-20 :
♦ LR = 17.21 < Lmax = 1320m
♦ Vmax = 87 Km/h => Lmin = 110m ; LR < Lmin
Nel caso di clotoide di flesso è possibile inserire un tratto rettilineo di lunghezza non superiore a
In questo caso non vale quindi il requisito di lunghezza minima riportato nella tabella 2.3.
♦ Raggio iniziale = 400m
Raggio finale = 400m R > LR per LR < 300m Sez. 25-26 :
♦ LR = 509.83m < Lmax = 2134m
♦ Vmax = 97 Km/h => Lmin = 150m ; LR > Lmin ♦ Raggio iniziale = 400m
Raggio finale = 400m R ≥ 400 per LR ≥ 300m Sez. 30-31 :
♦ LR = 5.85m < Lmax = 1320m
♦ Vmax = 89 Km/h => Lmin = 112m ; LR < Lmin
Nel caso di clotoide di flesso è possibile inserire un tratto rettilineo di lunghezza non superiore a
In questo caso non vale quindi il requisito di lunghezza minima riportato nella tabella 2.3.
♦ Raggio iniziale = 400m
Raggio finale = 400m R > LR per LR < 300m
5 . 12 2 1 A A L= + 5 . 12 2 1 A A L= +
42
Sez. 38-39 :
♦ LR = 504.44m < Lmax = 1540m
♦ Vmax = 70 Km/h => Lmin = 65m ; LR > Lmin ♦ Raggio iniziale = 400m
Raggio finale = 200m R ≥ 400 per LR ≥ 300m Sez. 44-46 :
♦ LR = 62.06 < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 200m
Raggio finale = 150m R > LR per LR < 300m Sez. 52-61 :
♦ LR = 626.20m < Lmax = 1320m
♦ Vmax =60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 150m
Raggio finale = 150m R ≥ 400 per LR ≥ 300m Sez. 66-68 :
♦ LR = 405.61m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR > Lmin ♦ Raggio iniziale = 150m
43
Sez. 71.72 :
♦ LR = 38.54m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR < Lmin ♦ Raggio iniziale = 200m
Raggio finale = 120m R > LR per LR < 300m Sez. 84-85 :
♦ LR = 154.69m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR< Lmin ♦ Raggio iniziale = 120m
Raggio finale = 120m R > LR per LR < 300m Sez. 90-95 :
♦ LR = 450.70 m< Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR< Lmin ♦ Raggio iniziale = 120m
Raggio finale = 120m R ≥ 400 per LR ≥ 300m Sez. 99-102 :
♦ LR = 441.54m < Lmax = 1320m
♦ Vmax = 60 Km/h => Lmin = 50m ; LR< Lmin ♦ Raggio iniziale = 120m
44
Sez. 107-112 :
♦ LR = 615.38m < Lmax = 1782m
♦ Vmax = 81 Km/h => Lmin = 91m ; LR< Lmin ♦ Raggio iniziale = 250m
Raggio finale = 450m R ≥ 400 per LR ≥ 300m Sez. 118-120 :
♦ LR = 470.891m < Lmax = 2200m
♦ Vmax = 100 Km/h => Lmin = 150m ; LR< Lmin ♦ Raggio iniziale = 450m
Raggio finale = 450m R ≥ 400 per LR ≥ 300m Sez. 124-126 :
♦ LR = 294.29m < Lmax = 2200m
♦ Vmax = 100 Km/h => Lmin = 150m ; LR< Lmin ♦ Raggio iniziale = 450m
Raggio finale = / R > LR per LR < 300m 2.3.2 Curve circolari
Nel progetto sono state utilizzate curve circolari aventi raggi e sviluppi tali da rispettare le regole indicate dalla Normativa, secondo cui la velocità di progetto di una curva circolare è condizionata da tre verifiche:
• Verifica allo sbandamento del veicolo in curva;
• Verifica dell’esistenza della distanza di visibilità, come minimo per l’arresto;
45
• Una curva circolare, per essere correttamente percepita, deve avere uno sviluppo corrispondente ad un tempo di percorrenza di almeno 2,5 secondi valutato con riferimento alla velocità di progetto della curva. In qualche caso questa regola non è stata soddisfatta perché si è preferito assecondare le impervietà orografiche che altrimenti avrebbero comportato l’ausilio di opre d’arte;
Dalla verifica allo sbandamento risulta che il raggio di una curva è una funzione della velocità con la quale si affronta, della pendenza trasversale della piattaforma e dell’aderenza trasversale secondo la seguente equazione:
(1) dove,
V = velocità di progetto della curva (Km/h) R = raggio della curva (m)
ft = coefficiente di aderenza trasversale α = pendenza trasversale della strada
I valori della velocità in funzione del raggio si possono sempre ricavare dalla (1), tenendo conto che ft varia con V. Esplicitando il tutto in funzione di V si ricava:
V² (1-0.0015 R) + 0.432 R V – 50.17 R = 0
Questa equazione è valida per strade aventi velocità massima di 100, 120 e 140 Km/h.
(
f tgα)
V R t + ⋅ = 127 246
Per una strada di tipo C se prendiamo tgα = 0.07 (valore massimo consentito), ft = 0.17 (vedi tabella 2.5) e V = Vpmin = 60 Km/h si ricava il valore minimo del raggio Rmin = 118m
Velocità (Km/h) 25 40 60 80 100 120 140
ftmax Strade tipo A,B,C,F
/ 0.21 0.17 0.13 0.11 0.10 0.09 Tab. 2.5
Per R > Rmin e finché V < Vpmax si può applicare la (1), poi per R > R* = 437m si fa diminuire la pendenza trasversale fino al valore minimo pari al 2.5% in modo che la velocità di progetto resti costante e pari al valore massimo. La normativa ha riportato sotto forma di diagramma il legame tra R, V, ft, e tgα (fig. 2.2).
47
La verifica sulla distanza di visibilità, per l’arresto o per il sorpasso, impone che l’utente sia in grado di vedere, mentre percorre la curva, ad una distanza non inferiore a quella presa in esame. Deve quindi essere garantita sempre la distanza di visibilità per l’arresto, e tanto più possibile, nelle strade a due corsie, la distanza di visibilità per il sorpasso. Le Norme precisano che tra gli ostacoli non vanno considerati i veicoli in colonna. Occorre precisare che deve trattarsi di ostacoli aventi un certo sviluppo o, al limite, continui: gli ostacoli isolati di piccole dimensioni (alberi isolati, pali, ecc.) non rientrano in questo discorso.
Indicando con Δ la distanza della traiettoria dell’ostacolo più vicino al margine esterno della corsia, con R’ il raggio in asse della corsia (ricavato con la (1) o mediante diagramma) e con D la distanza di visuale libera che si vuole assicurare, si ricava:
Questa deve essere soddisfatta per D = DA e qualora si volesse consentire il sorpasso in curva, anche per D = DS. La relazione precedente garantisce la visibilità richiesta quando D è minore dello sviluppo della curva in caso contrario si rende necessaria una verifica grafica. Viceversa noti Δ e R’ si può ricavare la distanza D disponibile dalla relazione precedente, arrestando lo sviluppo in serie del coseno al secondo termine, ottenendo:
Anche questa valida quando D è minore dello sviluppo della curva in caso contrario si rende necessaria una verifica grafica.
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ − ⋅ = Δ ' 2 cos 1 ' R D R Δ =2 2R' D
48
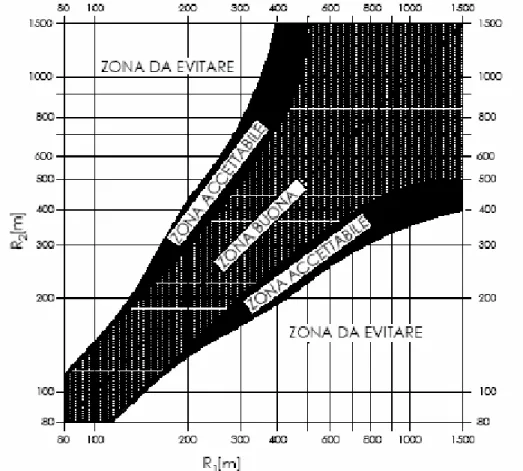
Inoltre i rapporti tra i raggi R1 e R2 di due curve circolari successive deve essere regolato dall’abaco di Figura 2.3, tenendo conto che per le strada di tipo C è utilizzabile pure la “zona accettabile”;
Fig. 2.3 – Rapporti tra i raggi di due curve circolari consecutive TRATTO 4-5 (ALTERNATIVA 1)
Sez. 0-3:
R = 400m ; L = 232.52m ; V = 95Km/h = 26.4m/s ; L/V = 8.8s > 2.5s Sez. 7-10:
49 Sez. 14-15: R = 600m ; L = 85.75m ; V = 100Km/h = 27.8m/s ; L/V = 3.1s > 2.5s Sez. 18-19: R = 800m ; L = 170.39m ; V = 100Km/h = 27.8m/s ; L/V = 6.1s > 2.5s Sez. 28-31: R = 800m ; L = 267.11m ; V = 100Km/h = 27.8m/s ; L/V = 9.6s > 2.5s Sez. 33-37: R = 450m ; L = 263.43m ; V = 100Km/h = 27.8m/s ; L/V = 9.5s > 2.5s TRATTO 4-5 (ALTERNATIVA 2) Sez. 4-5: R = 400m ; L = 232.52m ; V = 95Km/h = 26.4m/s ; L/V = 8.8s > 2.5s Sez. 9-10: R = 200m ; L = 74.17m ; V = 75Km/h = 20.8m/s ; L/V = 3.6s > 2.5s Sez. 14-17: R = 120m ; L = 51.09m ; V = 60Km/h = 16.7m/s ; L/V = 3.1s > 2.5s Sez. 21-22: R = 120m ; L = 12.91m ; V = 60Km/h = 16.7m/s ; L/V = 0.8s < 2.5s
50 Sez. 25-26: R = 200m ; L = 84.33m ; V = 5Km/h = 20.8m/s ; L/V = 4.1s > 2.5s Sez. 29-30: R = 400m ; L = 131.10m ; V = 95Km/h = 26.4m/s ; L/V = 4.9s > 2.5s Sez. 35-36: R = 600m ; L = 216.87m ; V = 100Km/h = 27.8m/s ; L/V = 7.8s > 2.5s Sez. 59-63: R = 600m ; L = 378.83m ; V = 100Km/h = 27.8m/s ; L/V = 13.6s > 2.5s TRATTO 5a-7 Sez. 4-5: R = 400m ; L = 79.97m ; V = 95Km/h = 26.4m/s ; L/V = 3.0s > 2.5s Sez. 11-12: R = 400m ; L = 226.48m ; V = 95Km/h = 26.4m/s ; L/V = 8.6s > 2.5s Sez. 17-18: R = 400m ; L = 363.03m ; V = 95Km/h = 26.4m/s ; L/V = 13.7s > 2.5s Sez. 24-25: R = 200m ; L = 24.67 ; V = 75Km/h = 20.8m/s ; L/V = 1.2s < 2.5s
51 Sez. 30-32: R = 120m ; L = 27.21m ; V = 60Km/h = 16.7m/s ; L/V = 1.6s < 2.5s Sez. 37-38: R = 120m ; L = 20.36m ; V = 60Km/h = 16.7m/s ; L/V = 1.3s < 2.5s Sez. 43-46: R = 200m ; L = 71.10m ; V = 75Km/h = 20.8m/s ; L/V = 3.4s > 2.5s Sez. 50-51: R = 250m ; L = 37.76m ; V = 80Km/h = 22.2m/s ; L/V = 1.7s < 2.5s Sez. 53-57: R = 450m ; L = 150.91m ; V = 100Km/h = 27.8m/s ; L/V = 5.4s > 2.5s Sez. 60-62: R = 800m ; L = 179.19m ; V = 100Km/h = 27.8m/s ; L/V = 6.4s > 2.5s Sez. 69-72: R = 600m ; L = 202.59m ; V = 100Km/h = 27.8m/s ; L/V = 7.3s > 2.5s Sez. 76-77: R = 450m ; L = 92.16m ; V = 100Km/h = 27.8m/s ; L/V = 3.3s > 2.5s Sez. 80-81: R = 250m ; L = 116.15m ; V = 80Km/h = 22.2m/s ; L/V = 85.2s > 2.5s
52 Sez. 83-84: R = 450m ; L = 127.31m ; V = 100Km/h = 27.8m/s ; L/V = 4.6s > 2.5s Sez. 93-94: R = 600m ; L = 153.78m ; V = 100Km/h = 27.8m/s ; L/V = 5.5s > 2.5s Sez. 99-100: R = 600m ; L = 91.57m ; V = 100Km/h = 27.8m/s ; L/V = 3.3s > 2.5s Nei tratti successivamente analizzati non saranno sempre rispettate le verifiche percettive del tracciato (transito per un tempo di almeno 2,5 secondi) essendo questi dei tratti soggetti a progettazione di adeguamento e per i quali, anche in considerazione del tipo di strada, non appaiono fondamentali.
TRATTO 7-8 Sez. 9-11: R = 350m ; L = 244.23m ; V = 92Km/h = 25.0m/s ; L/V = 9.8s > 2.5s Sez. 15-16: R = 350m ; L = 63.05 ; V = 90Km/h = 25.0m/s ; L/V = 2.5s > 2.5s Sez. 28-30: R = 450m ; L = 114.16m ; V = 100Km/h = 27.8m/s ; L/V = 4.1s > 2.5s
53 Sez. 38-39: R = 450m ; L = 88.69m ; V = 100Km/h = 27.8m/s ; L/V = 3.3s > 2.5s Sez. 48-50: R = 450m ; L = 195.08m ; V = 100Km/h = 27.8m/s ; L/V = 7.0s > 2.5s Sez. 61-63: R = 250m ; L = 78.05m ; V = 80Km/h = 22.2m/s ; L/V = 3.5s > 2.5s Sez. 67-68: R = 120m ; L = 4.76m ; V = 60Km/h = 16.7m/s ; L/V = 0.3s < 2.5s Sez. 72-73: R = 120m ; L = 216.85m ; V = 60Km/h = 16.7m/s ; L/V = 13.0s > 2.5s Sez. 80-81: R = 200m ; L = 22.06m; V = 75Km/h = 20.8m/s ; L/V = 1.1s < 2.5s Sez. 86-87: R = 200m ; L = 124.93m ; V = 75Km/h = 20.8m/s ; L/V = 0.3s < 2.5s Sez. 72-73: R = 120m ; L = 216.85m ; V = 60Km/h = 16.7m/s ; L/V = 13.0s > 2.5s
54 TRATTO 8-9 Sez. 3-5: R = 120m ; L = 90.06m ; V = 60Km/h = 16.7m/s ; L/V = 5.4s > 2.5s Sez. 8-9: R = 120m ; L = 52.42m ; V = 60Km/h = 16.7m/s ; L/V = 3.1s > 2.5s Sez. 19-20: R = 200m ; L = 20.25m ; V = 75Km/h = 20.8m/s ; L/V = 1.0 < 2.5s Sez. 26-31: R = 200m ; L = 135.78m ; V = 75Km/h = 20.8m/s ; L/V = 6.5s > 2.5s Sez. 36-37: R = 120m ; L = 1.60m ; V = 60Km/h = 16.7m/s ; L/V = 0.2s < 2.5s Sez. 43-45: R = 120m ; L = 61.39m ; V = 60Km/h = 16.7m/s ; L/V = 3.7s > 2.5s Sez. 50-51: R = 120m ; L = 20.24m ; V = 60Km/h = 16.7m/s ; L/V = 1.2s < 2.5s Sez. 56-57: R = 120m ; L = 42.36m ; V = 60Km/h = 16.7m/s ; L/V = 2.5s > 2.5s
55 Sez. 61-63: R = 200m ; L = 151.70m; V = 71Km/h = 19.7m/s ; L/V = 7.7s > 2.5s Sez. 72-73: R = 120m ; L = 19.37m ; V = 60Km/h = 16.7m/s ; L/V = 1.1s < 2.5s Sez. 76-77: R = 120m ; L = 50.60m ; V = 60Km/h = 16.7m/s ; L/V = 3.0s > 2.5s Sez. 81-82: R = 200m ; L = 5.96m ; V = 60Km/h = 16.7m/s ; L/V = 0.4s < 2.5s Sez. 89-90: R = 200m ; L = 0.80m ; V = 60Km/h = 16.7m/s ; L/V = 0.05s > 2.5s Sez. 94-95: R = 200m ; L = 14.55m ; V = 71Km/h = 19.7m/s ; L/V = 0.7s < 2.5s Sez. 96-99: R = 200m ; L = 35.68m ; V = 75Km/h = 20.8k/s ; L/V = 1.7s < 2.5s Sez. 104-105: R = 200m ; L = 32.17m ; V = 71Km/h = 19.7m/s ; L/V = 1.6s < 2.5s Sez. 110-112: R = 200m ; L = 52.72m ; V = 60Km/h = 16.7m/s ; L/V = 3.2s > 2.5s
56 Sez. 118-119: R = 120m ; L = 56.11m ; V = 60Km/h = 16.7m/s ; L/V = 3.4s >2.5s Sez. 124-126: R = 150m ; L = 47.54m ; V = 62Km/h = 17.2m/s ; L/V = 2.8s > 2.5s Sez. 130-132: R = 150m ; L = 109.57m ; V = 62Km/h = 17.2m/s ; L/V = 6.4s > 2.5s Sez. 138-139: R = 120m ; L = 50.04m ; V = 60Km/h = 16.7m/s ; L/V = 3.0s > 2.5s Sez. 145-146: R = 150m ; L = 34.59m; V = 62Km/h = 17.2m/s ; L/V = 2.0s <2.5s Sez. 150-151: R = 120m ; L = 22.97m ; V = 60Km/h = 16.7m/s ; L/V = 1.4s <2.5s Sez. 158-159: R = 120m ; L = 25.10m ; V = 60Km/h = 16.7m/s ; L/V = 1.5s < 2.5s Sez. 163-164: R = 120m ; L = 51.59m ; V = 60Km/h = 16.7m/s ; L/V = 3.1s > 2.5s Sez. 172-173: R = 120m ; L = 52.50m ; V = 60Km/h = 16.7m/s ; L/V = 3.1s > 2.5s
57 Sez. 176-178: R = 120m ; L = 31.59m; V = 60Km/h = 16.7m/s ; L/V = 1.9 s <2.5s TRATTO 9-10 Sez. 4-6: R = 120m ; L = 31.73m ; V = 60Km/h = 16.7m/s ; L/V = 1.9s < 2.5s Sez. 11-12: R = 200m ; L = 0.92m ; V = 60Km/h = 16.7m/s ; L/V = 0.06s < 2.5s Sez. 16-17: R = 400m ; L = 79.39m ; V = 75Km/h = 20.8m/s ; L/V = 3.8s < 2.5s Sez. 23-24: R = 400m ; L = 21.34m ; V = 97Km/h = 26.9m/s ; L/V = 0.8s < 2.5s Sez. 27-28: R = 400m ; L = 34.31m ; V = 97Km/h = 26.9m/s ; L/V = 1.3s < 2.5s Sez. 34-35: R = 400m ; L = 123.40m; V = 80Km/h = 22.2m/s ; L/V = 5.6s> 2.5s Sez. 41-42: R = 200m ; L = 15.75m ; V = 68Km/h = 18.9m/s ; L/V = 0.8s < 2.5s
58 Sez. 49-50: R = 150m ; L = 12.07m ; V = 60Km/h = 16.7m/s ; L/V = 0.7s <2.5s Sez. 62-63: R = 150m ; L = 18.11m; V = 60Km/h = 16.7m/s ; L/V = 1.1s < 2.5s Sez. 69-70: R = 200m ; L = 21.73m ; V = 60Km/h = 16.7m/s ; L/V = 1.3s < 2.5s Sez. 74-77: R = 120m ; L = 84.35m ; V = 60Km/h = 16.7m/s ; L/V = 5.1s > 2.5s Sez. 81-82: R = 120m ; L = 153.66m ; V = 60Km/h = 16.7m/s ; L/V = 9.2s > 2.5s Sez. 87-88: R = 120m ; L = 58.44m ; V = 60Km/h = 16.7m/s ; L/V = 3.5s > 2.5s Sez. 96-97: R = 120m ; L = 14.41m ; V = 60Km/h = 16.7m/s ; L/V = 0.9s < 2.5s Sez. 104-105: R = 250m ; L = 13.63m ; V = 72Km/h = 20.0m/s ; L/V = 0.8s < 2.5s Sez. 115-116: R = 450m ; L = 58.55m ; V = 92Km/h = 25.6m/s ; L/V = 2.3s < 2.5s
59
Sez. 121-122:
R = 450m ; L = 75.41m ; V = 100Km/h = 27.8m/s ; L/V = 2.7s > 2.5s Le curve che si susseguono con interposta una clotoide di flesso o di continuità ricadono nelle seguenti zone e sono riportate nell’ordine in cui si susseguono (vedi fig.2.3).
Rin Rfin Zona Rin Rfin Zona Rin Rfin Zona
Tratto 4-5 (1) Tratto 5°-7 Tratto 7-8
400 400 buona 400 400 buona 350 350 buona 400 600 buona 400 400 buona 200 200 buona 600 800 buona 400 200 Accet. Tratto 8-9
800 1200 buona 200 120 buona 120 120 buona 1200 800 buona 120 120 buona 200 200 buona
800 450 buona 120 200 buona 200 120 buona Tratto 4-5 (2) 200 250 buona 120 120 buona 250 200 buona 250 450 buona Tratto 9-10
200 120 buona 450 800 buona 120 120 buona 120 120 buona 800 600 buona
120 200 buona 600 450 buona 200 400 accet. 450 250 buona 400 600 buona 250 450 buona
I tratti di questa colonna sono quelli soggetti ad adeguamento e
per i quali anche le curve che si susseguono con interposto un
rettifilo rispettano questa limitazione.
2.4 Curve a raggio variabile
Tra due curve circolari e tra curva circolare e rettifilo, devono essere inserite curve a raggio variabile. Queste curve sono progettate in modo da garantire:
60
Una variazione di accelerazione centrifuga non compensata (contraccolpo) contenuta entro valori accettabili;
Una limitazione della pendenza (o sovrapendenza) longitudinale delle linee di estremità della piattaforma;
La percezione ottica corretta dell’andamento del tracciato.
Lungo le curve a raggio variabile, si realizza il graduale passaggio della pendenza trasversale dal valore proprio di un elemento a quello relativo al successivo.
Questo passaggio si ottiene facendo ruotare la carreggiata stradale, o parte di essa, secondo i casi, intorno al suo asse ovvero intorno alla sua estremità interna. E’ preferibile che tale asse sia quello della carreggiata perché ciò comporta un sollevamento minore del bordo esterno della piattaforma.
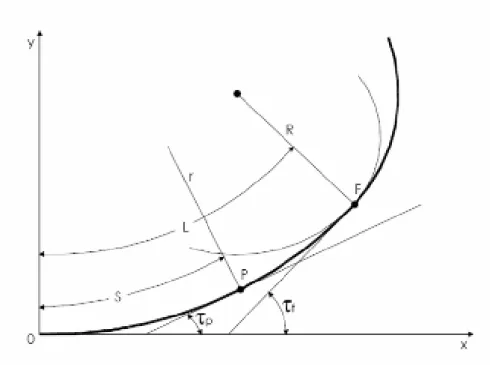
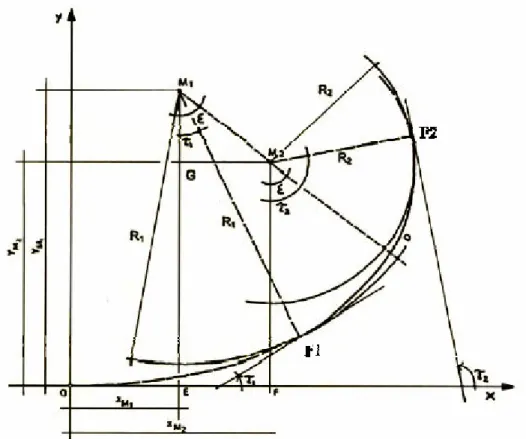
La curva a raggio variabile impiegata è la clotoide, avente equazione:
dove:
r = raggio di curvatura nel punto P generico s = ascissa curvilinea nel punto P generico A = parametro di scala
2
A
s
r
×
=
61
Figura 2.4: della clotoide di parametro A e dove ancora, nella figura:
F = punto finale della clotoide
R (m) = raggio dell’arco di cerchio da raccordare L (m) = lunghezza dell’arco di clotoide
τp = angolo di deviazione nel generico punto P
62
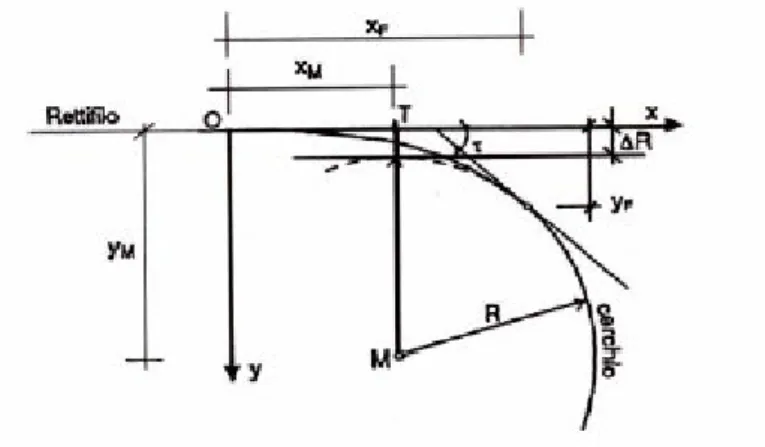
CLOTOIDE RETTIFILO – CURVA
Generalmente è fissata la posizione del rettifilo e della curva (e quindi è noto lo scostamento ΔR con il rettifilo). Si tratta di individuare il parametro A e l’origine del sistema di assi a cui è riferita la clotoide.
Figura 2.5: Inserimento di una clotoide tra un cerchio ed un rettifilo Il parametro A della clotoide e le altre grandezze si ricavano dalle seguenti espressioni: 4 3 14 3 1 24 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ + ⋅Δ ⋅ Δ ⋅ ⋅ = R R R R A 2 2 2 R A ⋅ = τ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ⋅ ⋅ ⋅ = 216 10 1 2 τ τ2 τ4 A xF ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ⋅ ⋅ ⋅ = 1320 42 3 2 τ τ τ3 τ5 A yF τ sen R x xM = F − ⋅ yM = yF +R⋅senτ
63
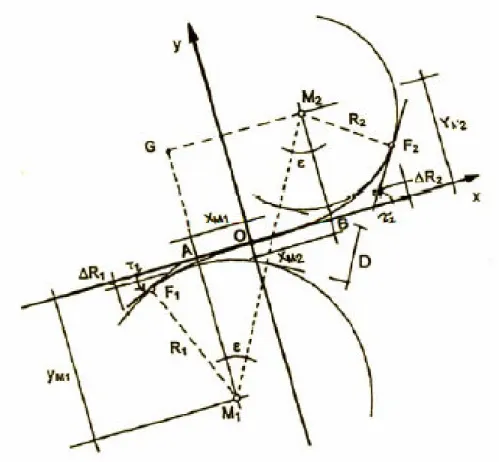
CLOTOIDE DI FLESSO
I dati del problema sono i raggi R1 e R2 dei due cerchi da raccordare e la posizione relativa dei due cerchi individuata dalla distanza D. Resta da determinare i valori dei parametri A1 e A2 con A1 ≠ A2 (oppure solo un parametro A=A1=A2 se la clotoide introdotta è simmetrica) dei due rami di clotoide e la posizione del sistema di assi cui essi sono riferiti.
64
Le espressioni che consentono di determinare il parametro A e le altre grandezze sono di seguito riportate.
2 1 2 1 2 R A ⋅ = τ 2 2 2 2 2 R A ⋅ = τ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + + ⋅ = 1 2 1 2 M M M M y y x x arctg ε ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ⋅ ⋅ ⋅ = 216 10 1 2 4 1 2 1 1 1 τ τ τ A xF ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ⋅ ⋅ ⋅ = 1320 42 3 2 5 1 3 1 1 1 1 τ τ τ τ A yF ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ⋅ ⋅ ⋅ = 216 10 1 2 4 2 2 2 2 2 τ τ τ A xF ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ⋅ ⋅ ⋅ = 1320 42 3 2 5 2 3 2 2 2 2 τ τ τ τ A yF 1 1 1 1 x R senτ xM = F − ⋅ yM1 = yF1 +R1⋅cosτ1 2 2 2 2 x R senτ xM = F − ⋅ yM2 = yF2 +R2⋅cosτ2
65
CLOTOIDE DI CONTINUITA’
I dati del problema sono i due raggi R1 e R2 delle curve e la distanza D misurata lungo i centri delle curve circolari.
66
Le espressioni che consentono di determinare il parametro A e le altre grandezze sono di seguito riportate.
2 1 2 1 2 R A ⋅ = τ 2 2 2 2 2 R A ⋅ = τ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − ⋅ = 2 1 1 2 M M M M y y x x arctg ε ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ⋅ ⋅ ⋅ = 216 10 1 2 4 1 2 1 1 1 τ τ τ A xF ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ⋅ ⋅ ⋅ = 1320 42 3 2 5 1 3 1 1 1 1 τ τ τ τ A yF ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ⋅ ⋅ ⋅ = 216 10 1 2 4 2 2 2 2 2 τ τ τ A xF ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + − ⋅ ⋅ ⋅ = 1320 42 3 2 5 2 3 2 2 2 2 τ τ τ τ A yF 1 1 1 1 x R senτ xM = F − ⋅ yM1 = yF1+R1⋅cosτ1 2 2 2 2 x R senτ xM = F − ⋅ yM2 = yF2+R2⋅cosτ2
67
VERIFICA DEL PARAMETRO DI SCALA (A) VERIFICA 1: limitazione del contraccolpo.
Affinché lungo un arco di clotoide si abbia una graduale variazione dell’accelerazione trasversale non compensata nel tempo (contraccolpo c), fra il parametro A e la massima velocità, V (km/h), desunta dal diagramma di velocità, per l’elemento di clotoide deve essere verificata la relazione:
VERIFICA 2: sovrapendenza longitudinale delle linee di estremità della carreggiata.
Nelle sezioni di estremità di un arco di clotoide la carreggiata stradale presenta differenti assetti trasversali, che vanno raccordati longitudinalmente, introducendo una sovrapendenza nelle linee di estremità della carreggiata rispetto alla pendenza dell’asse di rotazione. Nel caso il raggio iniziale sia di valore finito il parametro deve verificare la seguente disuguaglianza:
dove,
Bi = distanze fra l’asse di rotazione e il ciglio della carreggiata nella sezione iniziale della clotoide;
2 021 . 0 V A≥ ⋅
(
)
max min 1 1 100 i R R q q B A A i f i f i Δ ⋅ ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − ⋅ − ⋅ = ≥68
Δimax (%) = sovrapendenza longitudinale massima della linea costituita dai punti che distano Bi dall’asse di rotazione; in assenza di allargamento tale linea coincide con l’estremità della carreggiata;
qi = ici/100 dove ici = pendenza trasversale iniziale, in valore assoluto; qf = icf/100 dove icf = pendenza trasversale finale, in valore assoluto; Ri = raggio nel punto iniziale della clotoide
Rf = raggio nel punto terminale della clotoide
Nel caso in cui nel punto iniziale la curvatura è nulla il parametro deve verificare la seguente disuguaglianza:
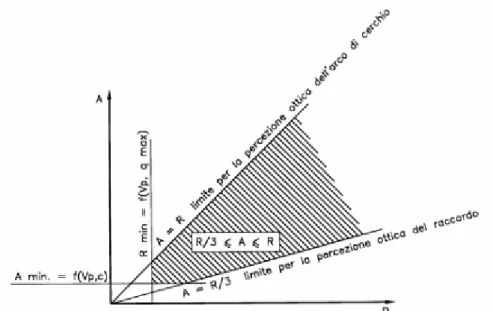
VERIFICA 3: criterio ottico
Per garantire la percezione ottica del raccordo deve essere verificata la relazione:
Inoltre, per garantire la percezione dell’arco di cerchio alla fine della clotoide, deve essere:
(
)
max min 100 i q q B R A A f i f i Δ ⋅ − ⋅ ⋅ = ≥ 3 R A≥ R A≤69
CAMPO DI UTILIZZAZIONE DEI RACCORDI CLOTOIDICI
Resta definito dai valori ammissibili per il parametro A, come dalla figura seguente
Fig. 2.8; Campo di utilizzazione dei raccordi clotoidici
2.5 Pendenze trasversali nelle curve a raggio variabile
Lungo le curve a raggio variabile, inserite fra due elementi di tracciato a curvatura costante si realizza il graduale passaggio della pendenza trasversale dal valore proprio di un elemento a quello relativo al successivo.
Questo passaggio si ottiene facendo ruotare la carreggiata stradale, o parte di essa, secondo i casi, intorno al suo asse ovvero intorno alla sua estremità interna (Fig. 2.9).
La rotazione intorno all’asse è generalmente da preferire, ove possibile, perché comporta un minor sollevamento dell’estremità della piattaforma: essa può essere generalmente adottata nelle strade a
70
carreggiata unica a 2 o più corsie e nelle strade a carreggiate separate con spartitraffico di larghezza superiore ai 4 m. Per larghezze minori, allo scopo di evitare che lo spartitraffico acquisti una eccessiva pendenza trasversale, è necessario far ruotare le due vie intorno alle estremità interne delle carreggiate.
Fig. 2.9
Nelle strade ad unica carreggiata a due o più corsie, la cui sagoma in rettifilo è a doppia falda, il passaggio dalla sagoma propria del rettifilo a quella della curva circolare avviene generalmente in due tempi: in una prima fase ruota soltanto la falda esterna intorno all’asse della carreggiata fino a realizzare una superficie piana, successivamente ruota l’intera carreggiata (Fig. 2.10), sempre intorno al suo asse.
71
In curva gli elementi che fiancheggiano la carreggiata (banchine, corsie di emergenza, corsie specializzate, piazzole di sosta) presentano pendenza uguale e concorde a quella della carreggiata.
Valori massimi della pendenza Δi
Per ragioni dinamiche (cioè per limitare la velocità di rotazione trasversale dei veicoli – velocità di rollio) la sovrapendenza longitudinale Δi [%] delle estremità della carreggiata (esclusi gli eventuali allargamenti in curva) non può superare il valore massimo che si calcola con la seguente espressione.
dove:
= variazione della pendenza trasversale nel tempo pari a 0,05
Bi = distanza (in m) fra l’asse di rotazione e l’estremità della carreggiata all’inizio della curva a raggio variabile
V = velocità di progetto [km/h] v = velocità di progetto [m/s] Valori minimi della pendenza Δ i
Quando lungo una curva a raggio variabile la pendenza trasversale della carreggiata cambia segno, per esempio lungo una clotoide di flesso e nel passaggio dal rettifilo alla curva circolare, durante una certa fase della rotazione la pendenza trasversale è inferiore a quella minima del 2,5% necessaria per il deflusso dell’acqua. In questi casi, allo scopo di
dt dq V B v B dt dq i = ⋅ i ⋅ = ⋅ i Δ max 100 18 ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ sec rad
72
ridurre al minimo la lunghezza del tratto di strada in cui può aversi ristagno di acqua, è necessario che la pendenza longitudinale Δi dell’estremità che si solleva sia non inferiore ad un valore Δimin [%] dato da:
Δimin= 0,1 × Bimin [%]
Se pertanto la pendenza Δi è inferiore a Δimin, è necessario spezzare in due parti il profilo longitudinale di quella estremità della carreggiata che è esterna alla curva, realizzando un primo tratto con pendenza maggiore o uguale a Δimin, fino a quando la pendenza trasversale della via ha raggiunto il 2,5%; la pendenza risultante per il tratto successivo potrà anche essere inferiore a Δimin.
TRATTO 4-5 – ALTERNAIVA 1
Raggio 450 B [m] 4,75 Angolo τ1 0,115 XM1 [m] 51,951 Acceleraz. a [m/s2] 0,80 Y M1 [m] 451,000 Distanza (D) 1,0 Vmax [Km/h] 100,00 ΔR1 [m] 1,000 V1 [Km/h] 100,00 L1= (A2/R1) [m] 103,948V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 44,65 [m] Δimax 1 0,855
iTrasv1 [%] 6,90
Parametro A 216,28 iTrasv2 [%] 2,50
A > 0,021 Vmax2 210,00 A > ((Δh1*R1)/(Δimax1))1/2 153,30
VERO VERO
R1/3 < A < R2 VERO
Ramo di clotoide
Tratto 4-5 ; Alternativa 1 ; Clotoide cerchio-rettifilo 450-1
Verifiche parametro A Dati di Progetto Dati di Partenza
73
Raggio 1 (R1) 600 B [m] 4,75 Angolo τ1 0,211 XM1 [m] 126,562
Raggio 2 (R2) 400 Acceleraz. a [m/s2] 0,80 YM1 [m] 604,456
Distanza (D) 67,0 Vmax [Km/h] 100,00 ΔR1 [m] 4,456
V1 [Km/h] 100,00 L1= (A2/R1) [m] 253,500
R2/R1 0,67 V2 [Km/h] 95,00 Δh1 =((B*iTrasv1) 27,08 [m] Δimax 1 0,855
D/R1 0,11 iTrasv1 [%] 5,70
A/R1 (Grafico) 0,65 iTrasv2 [%] 7,00
Parametro A 390,00 Angolo τ2 0,475 XM2 [m] 188,702
YM2 [m] 414,941
ΔR2 [m] 14,941
A > 0,021 Vmax2 210,00 A > ((Δh
1*R1)/(Δimax1))1/2 137,84 L2= (A2/R2) [m] 380,250
VERO VERO Δh2 =((B*iTrasv2) 33,25 [m] Δimax 2 0,900
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 121,56
VERO VERO Angolo ε [gradi] 17,185
Verifiche parametro A Dati di Partenza
Parametri di calcolo
Tratto 4-5 ; Alternativa 1 ; Clotoide di flesso 600-400
Dati di Progetto Ramo di clotoide n. 1
Ramo di clotoide n. 2
Raggio 1 (R1) 800 B [m] 4,75 Angolo τ1 0,146 XM1 [m] 116,557
Raggio 2 (R2) 600 Acceleraz. a [m/s2] 0,80 YM1 [m] 802,832
Distanza (D) 35,5 Vmax [Km/h] 100,00 ΔR1 [m] 2,832
V1 [Km/h] 100,00 L1= (A2/R1) [m] 233,280
R2/R1 0,75 V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 22,33 [m] Δimax 1 0,855
D/R1 0,04 iTrasv1 [%] 4,70
A/R1 (Grafico) 0,54 iTrasv2 [%] 5,70
Parametro A 432,00 Angolo τ2 0,259 XM2 [m] 155,172
YM2 [m] 606,702
ΔR2 [m] 6,702
A > 0,021 Vmax2 210,00 A > ((Δh
1*R1)/(Δimax1))1/2 144,53 L2= (A2/R2) [m] 311,040
VERO VERO Δh2 =((B*iTrasv2) 27,08 [m] Δimax 2 0,855
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 137,84
VERO VERO Angolo ε [gradi] 10,912
Verifiche parametro A Dati di Partenza
Parametri di calcolo
Tratto 4-5 ; Alternativa 1 ; Clotoide di flesso 800-600
Dati di Progetto Ramo di clotoide n. 1
Ramo di clotoide n. 2
Raggio 1 (R1) 1200 B [m] 4,75 Angolo τ1 0,058 XM1 [m] 69,352
Raggio 2 (R2) 800 Acceleraz. a [m/s2] 0,80 YM1 [m] 1200,668
Distanza (D) 10,4 Vmax [Km/h] 100,00 ΔR1 [m] 0,668
V1 [Km/h] 100,00 L1= (A2/R1) [m] 138,720
R2/R1 0,67 V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 17,58 [m] Δimax 1 0,855
D/R1 0,01 iTrasv1 [%] 3,70
A/R1 (Grafico) 0,34 iTrasv2 [%] 4,70
Parametro A 408,00 Angolo τ2 0,130 XM2 [m] 103,981
YM2 [m] 802,254
ΔR2 [m] 2,254
A > 0,021 Vmax2 210,00 A > ((Δh
1*R1)/(Δimax1))1/2 157,06 L2= (A2/R2) [m] 208,080
VERO VERO Δh2 =((B*iTrasv2) 22,33 [m] Δimax 2 0,855
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 144,53
VERO VERO Angolo ε [gradi] 4,946
Verifiche parametro A Dati di Partenza
Parametri di calcolo
Tratto 4-5 ; Alternativa 1 ; Clotoide di flesso 1200-800 Dati di Progetto Ramo di clotoide n. 1
74 Dati di Progetto Raggio 1 (R1) 800 B [m] 4,75 Angolo τ1 0,146 XM1 [m] 116,557 Raggio 2 (R2) 450 Acceleraz. a [m/s2] 0,80 YM1 [m] 802,832 Distanza (D) 1,3 Vmax [Km/h] 100,00 ΔR1 [m] 2,832 V1 [Km/h] 100,00 L1= (A2/R1) [m] 233,280
R2/R1 0,56 V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 22,33 [m] Δimax 1 0,855
D/R1 0,0017 iTrasv1 [%] 4,70
A/R1 (Grafico) 0,54 iTrasv2 [%] 6,90
Parametro A 432,00 Angolo τ2 0,461 XM2 [m] 205,901
YM2 [m] 465,805
ΔR2 [m] 15,805
A > 0,021 Vmax2 210,00 A > ((Δh
1*R1)/(Δimax1))1/2 144,53 L2= (A2/R2) [m] 414,720
VERO VERO Δh2 =((B*iTrasv2) 32,78 [m] Δimax 2 0,855
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 131,34
VERO VERO Angolo ε [gradi] 14,847 L= 181,440
Tratto 4-5 ; Alternativa 1 ; Clotoide di continuità 800-450
Verifiche parametro A Ramo di clotoide n. 2 Dati di Partenza Parametri di calcolo Ramo di clotoide n. 1 Raggio 450 B [m] 4,75 Angolo τ1 0,115 XM1 [m] 51,951 Acceleraz. a [m/s2] 0,80 Y M1 [m] 451,000 Distanza (D) 1,0 Vmax [Km/h] 100,00 ΔR1 [m] 1,000 V1 [Km/h] 100,00 L1= (A2/R1) [m] 103,948
V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 44,65 [m] Δimax 1 0,855
iTrasv1 [%] 6,90
Parametro A 216,28 iTrasv2 [%] 2,50
A > 0,021 Vmax2 210,00 A > ((Δh1*R1)/(Δimax1))1/2 153,30
VERO VERO
R1/3 < A < R2 VERO
Ramo di clotoide
Tratto 4-5 ; Alternativa 1 ; Clotoide cerchio-rettifilo 450-1
Verifiche parametro A Dati di Progetto Dati di Partenza Parametri di calcolo
TRATTO 4-5 – ALTERNAIVA 2
Dati di Progetto Raggio 250 B [m] 4,75 Angolo τ1 0,347 XM1 [m] 86,440 Acceleraz. a [m/s2] 0,80 Y M1 [m] 255,000 Distanza (D) 5,0 Vmax [Km/h] 99,55 ΔR1 [m] 5,000 V1 [Km/h] 80,00 L1= (A2/R1) [m] 173,576V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 45,13 [m] Δimax 1 1,069
iTrasv1 [%] 7,00
Parametro A 208,31 iTrasv2 [%] 2,50
A > 0,021 Vmax2 208,11 A > ((Δh1*R1)/(Δimax1))1/2 102,74
VERO VERO
R1/3 < A < R2 VERO
Tratto 4-5 ; Alternativa 2 ; Clotoide cerchio-rettifilo 250-5
Verifiche parametro A Dati di Partenza
Parametri di calcolo
75
Raggio 1 (R1) 250 B [m] 4,75 Angolo τ1 0,192 XM1 [m] 47,991
Raggio 2 (R2) 200 Acceleraz. a [m/s2] 0,80 YM1 [m] 251,537
Distanza (D) 17,2 Vmax [Km/h] 85,00 limitazione ΔR1 [m] 1,537
V1 [Km/h] 80,00 L1= (A2/R1) [m] 96,100
R2/R1 0,80 V2 [Km/h] 75,00 Δh1 =((B*iTrasv1) 33,25 [m] Δimax 1 1,069
D/R1 0,07 iTrasv1 [%] 7,00
A/R1 (Grafico) 0,62 iTrasv2 [%] 7,00
Parametro A 155,00 Angolo τ2 0,300 XM2 [m] 59,882
YM2 [m] 202,997
ΔR2 [m] 2,997
A > 0,021 Vmax2 151,73 A > ((Δh
1*R1)/(Δimax1))1/2 88,19 L2= (A2/R2) [m] 120,125
VERO VERO Δh2 =((B*iTrasv2) 33,25 [m] Δimax 2 1,140
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 76,38
VERO VERO Angolo ε [gradi] 13,351
Tratto 4-5 ; Alternativa 2 ; Clotoide di flesso 250-200
Verifiche parametro A Dati di Progetto Ramo di clotoide n. 2 Dati di Partenza Parametri di calcolo Ramo di clotoide n. 1 Raggio 1 (R1) 200 B [m] 4,75 Angolo τ1 0,180 XM1 [m] 35,961 Raggio 2 (R2) 120 Acceleraz. a [m/s2] 0,80 YM1 [m] 201,079
Distanza (D) 19,7 Vmax [Km/h] 75,00 limitazione ΔR1 [m] 1,079
V1 [Km/h] 75,00 L1= (A2/R1) [m] 72,000
R2/R1 0,60 V2 [Km/h] 60,00 Δh1 =((B*iTrasv1) 33,25 [m] Δimax 1 1,140
D/R1 0,10 iTrasv1 [%] 7,00
A/R1 (Grafico) 0,60 iTrasv2 [%] 7,00
Parametro A 120,00 Angolo τ2 0,500 XM2 [m] 59,503
YM2 [m] 124,956
ΔR2 [m] 4,956
A > 0,021 Vmax2 118,13 A > ((Δh
1*R1)/(Δimax1))1/2 76,38 L2= (A2/R2) [m] 120,000
VERO VERO Δh2 =((B*iTrasv2) 33,25 [m] Δimax 2 1,425
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 52,92
VERO VERO Angolo ε [gradi] 16,320
Verifiche parametro A Dati di Partenza
Parametri di calcolo
Tratto 4-5 ; Alternativa 2 ; Clotoide di flesso 200-120
Dati di Progetto Ramo di clotoide n. 1
Ramo di clotoide n. 2
Raggio 1 (R1) 120 B [m] 4,75 Angolo τ1 0,405 XM1 [m] 48,335
Raggio 2 (R2) 120 Acceleraz. a [m/s2] 0,80 YM1 [m] 123,261
Distanza (D) 24,8 Vmax [Km/h] 71,70 limitazione ΔR1 [m] 3,261
V1 [Km/h] 60,00 L1= (A2/R1) [m] 97,200
R2/R1 1,00 V2 [Km/h] 60,00 Δh1 =((B*iTrasv1) 33,25 [m] Δimax 1 1,425
D/R1 0,21 iTrasv1 [%] 7,00
A/R1 (Grafico) 0,90 iTrasv2 [%] 7,00
Parametro A 108,00 Angolo τ2 0,405 XM2 [m] 48,335
YM2 [m] 123,261
ΔR2 [m] 3,261
A > 0,021 Vmax2 107,96 A > ((Δh
1*R1)/(Δimax1))1/2 52,92 L2= (A2/R2) [m] 97,200
VERO VERO Δh2 =((B*iTrasv2) 33,25 [m] Δimax 2 1,425
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 52,92
VERO VERO Angolo ε [gradi] 21,412
Verifiche parametro A Dati di Partenza
Parametri di calcolo
Tratto 4-5 ; Alternativa 2 ; Clotoide di flesso 120-120
Dati di Progetto Ramo di clotoide n. 1
76
Raggio 1 (R1) 400 B [m] 4,75 Angolo τ1 0,120 XM1 [m] 47,997
Raggio 2 (R2) 200 Acceleraz. a [m/s2] 0,80 YM1 [m] 400,960
Distanza (D) 25,2 Vmax [Km/h] 96,60 limitazione ΔR1 [m] 0,960
V1 [Km/h] 95,00 L1= (A2/R1) [m] 96,040
R2/R1 0,50 V2 [Km/h] 75,00 Δh1 =((B*iTrasv1) 33,25 [m] Δimax 1 0,900
D/R1 0,06 iTrasv1 [%] 7,00
A/R1 (Grafico) 0,49 iTrasv2 [%] 7,00
Parametro A 196,00 Angolo τ2 0,480 XM2 [m] 95,307
YM2 [m] 207,623
ΔR2 [m] 7,623
A > 0,021 Vmax2 195,96 A > ((Δh
1*R1)/(Δimax1))1/2 121,56 L2= (A2/R2) [m] 192,080
VERO VERO Δh2 =((B*iTrasv2) 33,25 [m] Δimax 2 1,140
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 76,38
VERO VERO Angolo ε [gradi] 13,250
Verifiche parametro A Dati di Partenza
Parametri di calcolo
Tratto 4-5 ; Alternativa 2 ; Clotoide di flesso 400-200
Dati di Progetto Ramo di clotoide n. 1
Ramo di clotoide n. 2
Raggio 1 (R1) 600 B [m] 4,75 Angolo τ1 0,211 XM1 [m] 126,562
Raggio 2 (R2) 400 Acceleraz. a [m/s2] 0,80 YM1 [m] 604,456
Distanza (D) 67,0 Vmax [Km/h] 100,00 ΔR1 [m] 4,456
V1 [Km/h] 100,00 L1= (A2/R1) [m] 253,500
R2/R1 0,67 V2 [Km/h] 95,00 Δh1 =((B*iTrasv1) 27,08 [m] Δimax 1 0,855
D/R1 0,11 iTrasv1 [%] 5,70
A/R1 (Grafico) 0,65 iTrasv2 [%] 7,00
Parametro A 390,00 Angolo τ2 0,475 XM2 [m] 188,702
YM2 [m] 414,941
ΔR2 [m] 14,941
A > 0,021 Vmax2 210,00 A > ((Δh
1*R1)/(Δimax1))1/2 137,84 L2= (A2/R2) [m] 380,250
VERO VERO Δh2 =((B*iTrasv2) 33,25 [m] Δimax 2 0,900
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 121,56
VERO VERO Angolo ε [gradi] 17,185
Verifiche parametro A Dati di Partenza
Parametri di calcolo
Tratto 4-5 ; Alternativa 2 ; Clotoide di flesso 600-400
Dati di Progetto Ramo di clotoide n. 1
Ramo di clotoide n. 2 Dati di Progetto Raggio 600 B [m] 4,75 Angolo τ1 0,141 XM1 [m] 84,402 Acceleraz. a [m/s2] 0,80 Y M1 [m] 601,980 Distanza (D) 2,0 Vmax [Km/h] 100,00 ΔR1 [m] 1,980 V1 [Km/h] 100,00 L1= (A2/R1) [m] 168,915
V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 60,33 [m] Δimax 1 0,855
iTrasv1 [%] 5,70
Parametro A 318,35 iTrasv2 [%] 7,00
A > 0,021 Vmax2 210,00 A > ((Δh1*R1)/(Δimax1))1/2 205,75
VERO VERO
R1/3 < A < R2 VERO
Tratto 4-5 ; Alternativa 2 ; Clotoide cerchio-rettifilo 600-2
Verifiche parametro A Dati di Partenza
Parametri di calcolo
77
TRATTO 5°-7
Raggio 1 (R1) 120 B [m] 4,75 Angolo τ1 0,205 XM1 [m] 24,542
Raggio 2 (R2) 120 Acceleraz. a [m/s2] 0,80 YM1 [m] 120,838
Distanza (D) 6,6 Vmax [Km/h] 60,00 limitazione ΔR1 [m] 0,838
V1 [Km/h] 60,00 L1= (A2/R1) [m] 49,152
R2/R1 1,00 V2 [Km/h] 60,00 Δh1 =((B*iTrasv1) 33,25 [m] Δimax 1 1,425
D/R1 0,06 iTrasv1 [%] 7,00
A/R1 (Grafico) 0,64 iTrasv2 [%] 7,00
Parametro A 76,80 Angolo τ2 0,205 XM2 [m] 24,542
YM2 [m] 120,838
ΔR2 [m] 0,838
A > 0,021 Vmax2 75,60 A > ((Δh
1*R1)/(Δimax1))1/2 52,92 L2= (A2/R2) [m] 49,152
VERO VERO Δh2 =((B*iTrasv2) 33,25 [m] Δimax 2 1,425
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 52,92
VERO VERO Angolo ε [gradi] 11,480
Tratto 5a-7 ; Clotoide di flesso 120-120
Verifiche parametro A Dati di Progetto Ramo di clotoide n. 2 Dati di Partenza Parametri di calcolo Ramo di clotoide n. 1 Raggio 1 (R1) 250 B [m] 4,75 Angolo τ1 0,192 XM1 [m] 47,991 Raggio 2 (R2) 200 Acceleraz. a [m/s2] 0,80 YM1 [m] 251,537
Distanza (D) 17,2 Vmax [Km/h] 85,00 limitazione ΔR1 [m] 1,537
V1 [Km/h] 80,00 L1= (A2/R1) [m] 96,100
R2/R1 0,80 V2 [Km/h] 75,00 Δh1 =((B*iTrasv1) 27,08 [m] Δimax 1 1,069
D/R1 0,07 iTrasv1 [%] 5,70
A/R1 (Grafico) 0,62 iTrasv2 [%] 7,00
Parametro A 155,00 Angolo τ2 0,300 XM2 [m] 59,882
YM2 [m] 202,997
ΔR2 [m] 2,997
A > 0,021 Vmax2 151,73 A > ((Δh
1*R1)/(Δimax1))1/2 79,58 L2= (A2/R2) [m] 120,125
VERO VERO Δh2 =((B*iTrasv2) 33,25 [m] Δimax 2 1,140
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 76,38
VERO VERO Angolo ε [gradi] 13,351
Verifiche parametro A Dati di Partenza
Parametri di calcolo
Tratto 5a-7 ; Clotoide di flesso 250-200
Dati di Progetto Ramo di clotoide n. 1
Ramo di clotoide n. 2 Dati di Progetto Raggio 1 (R1) 450 B [m] 4,75 Angolo τ1 0,146 XM1 [m] 65,564 Raggio 2 (R2) 250 Acceleraz. a [m/s2] 0,80 YM1 [m] 451,593 Distanza (D) 0,8 Vmax [Km/h] 100,00 ΔR1 [m] 1,593 V1 [Km/h] 90,00 L1= (A2/R1) [m] 131,220
R2/R1 0,56 V2 [Km/h] 80,00 Δh1 =((B*iTrasv1) 32,78 [m] Δimax 1 0,950
D/R1 0,0018 iTrasv1 [%] 6,90
A/R1 (Grafico) 0,54 iTrasv2 [%] 7,00
Parametro A 243,00 Angolo τ2 0,472 XM2 [m] 117,225
YM2 [m] 259,224
ΔR2 [m] 9,224
A > 0,021 Vmax2 210,00 A > ((Δh
1*R1)/(Δimax1))1/2 124,60 L2= (A2/R2) [m] 236,196
VERO VERO Δh2 =((B*iTrasv2) 33,25 [m] Δimax 2 1,069
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 88,19
VERO VERO Angolo ε [gradi] 15,032 L= 104,976
Tratto 5a-7 ; Clotoide di continuità 450-250
Verifiche parametro A
Ramo di clotoide n. 2
Dati di Partenza
Parametri di calcolo
78 Dati di Progetto Raggio 1 (R1) 800 B [m] 4,75 Angolo τ1 0,146 XM1 [m] 116,557 Raggio 2 (R2) 450 Acceleraz. a [m/s2] 0,80 YM1 [m] 802,832 Distanza (D) 1,3 Vmax [Km/h] 100,00 ΔR1 [m] 2,832 V1 [Km/h] 100,00 L1= (A2/R1) [m] 233,280
R2/R1 0,56 V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 22,33 [m] Δimax 1 0,855
D/R1 0,0016 iTrasv1 [%] 4,70
A/R1 (Grafico) 0,54 iTrasv2 [%] 6,90
Parametro A 432,00 Angolo τ2 0,461 XM2 [m] 205,901
YM2 [m] 465,805
ΔR2 [m] 15,805
A > 0,021 Vmax2 210,00 A > ((Δh
1*R1)/(Δimax1))1/2 144,53 L2= (A2/R2) [m] 414,720
VERO VERO Δh2 =((B*iTrasv2) 32,78 [m] Δimax 2 0,855
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 131,34
VERO VERO Angolo ε [gradi] 14,847 L= 181,440
Tratto 5a-7 ; Clotoide di continuità 800-450
Verifiche parametro A Ramo di clotoide n. 2 Dati di Partenza Parametri di calcolo Ramo di clotoide n. 1 Raggio 1 (R1) 800 B [m] 4,75 Angolo τ1 0,146 XM1 [m] 116,557 Raggio 2 (R2) 600 Acceleraz. a [m/s2] 0,80 YM1 [m] 802,832 Distanza (D) 35,5 Vmax [Km/h] 100,00 ΔR1 [m] 2,832 V1 [Km/h] 100,00 L1= (A2/R1) [m] 233,280
R2/R1 0,75 V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 22,33 [m] Δimax 1 0,855
D/R1 0,04 iTrasv1 [%] 4,70
A/R1 (Grafico) 0,54 iTrasv2 [%] 5,70
Parametro A 432,00 Angolo τ2 0,259 XM2 [m] 155,172
YM2 [m] 606,702
ΔR2 [m] 6,702
A > 0,021 Vmax2 210,00 A > ((Δh
1*R1)/(Δimax1))1/2 144,53 L2= (A2/R2) [m] 311,040
VERO VERO Δh2 =((B*iTrasv2) 27,08 [m] Δimax 2 0,855
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 137,84
VERO VERO Angolo ε [gradi] 10,912
Verifiche parametro A Dati di Partenza
Parametri di calcolo
Tratto 5a-7 ; Clotoide di flesso 800-600
Dati di Progetto Ramo di clotoide n. 1
Ramo di clotoide n. 2
Raggio 1 (R1) 600 B [m] 4,75 Angolo τ1 0,080 XM1 [m] 47,990
Raggio 2 (R2) 450 Acceleraz. a [m/s2] 0,80 YM1 [m] 600,640
Distanza (D) 8,1 Vmax [Km/h] 100,00 ΔR1 [m] 0,640
V1 [Km/h] 100,00 L1= (A2/R1) [m] 96,000
R2/R1 0,75 V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 33,25 [m] Δimax 1 0,855
D/R1 0,01 iTrasv1 [%] 7,00
A/R1 (Grafico) 0,40 iTrasv2 [%] 6,90
Parametro A 240,00 Angolo τ2 0,142 XM2 [m] 63,957
YM2 [m] 451,516
ΔR2 [m] 1,516
A > 0,021 Vmax2 210,00 A > ((Δh
1*R1)/(Δimax1))1/2 152,75 L2= (A2/R2) [m] 128,000
VERO VERO Δh2 =((B*iTrasv2) 32,78 [m] Δimax 2 0,855
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 131,34
VERO VERO Angolo ε [gradi] 6,073
Verifiche parametro A Dati di Partenza
Parametri di calcolo
Tratto 5a-7 ; Clotoide di flesso 600-450
Dati di Progetto Ramo di clotoide n. 1
79
Raggio 1 (R1) 450 B [m] 4,75 Angolo τ1 0,109 XM1 [m] 49,009
Raggio 2 (R2) 250 Acceleraz. a [m/s2] 0,80 YM1 [m] 450,890
Distanza (D) 19,2 Vmax [Km/h] 100,00 ΔR1 [m] 0,890
V1 [Km/h] 100,00 L1= (A2/R1) [m] 98,056
R2/R1 0,56 V2 [Km/h] 80,00 Δh1 =((B*iTrasv1) 32,78 [m] Δimax 1 0,855
D/R1 0,04 iTrasv1 [%] 6,90
A/R1 (Grafico) 0,47 iTrasv2 [%] 7,00
Parametro A 210,06 Angolo τ2 0,353 XM2 [m] 87,885
YM2 [m] 255,169
ΔR2 [m] 5,169
A > 0,021 Vmax2 210,00 A > ((Δh
1*R1)/(Δimax1))1/2 131,34 L2= (A2/R2) [m] 176,501
VERO VERO Δh2 =((B*iTrasv2) 33,25 [m] Δimax 2 1,069
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 88,19
VERO VERO Angolo ε [gradi] 10,973
Verifiche parametro A Dati di Partenza
Parametri di calcolo
Tratto 5a-7 ; Clotoide di flesso 450-250
Dati di Progetto Ramo di clotoide n. 1
Ramo di clotoide n. 2 Raggio 450 B [m] 4,75 Angolo τ1 0,115 XM1 [m] 51,951 Acceleraz. a [m/s2] 0,80 Y M1 [m] 451,000 Distanza (D) 1,0 Vmax [Km/h] 100,00 ΔR1 [m] 1,000 V1 [Km/h] 100,00 L1= (A2/R1) [m] 103,948
V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 44,65 [m] Δimax 1 0,855
iTrasv1 [%] 6,90
Parametro A 216,28 iTrasv2 [%] 2,50
A > 0,021 Vmax2 210,00 A > ((Δh1*R1)/(Δimax1))1/2 153,30
VERO VERO
R1/3 < A < R2 VERO
Ramo di clotoide
Tratto 5a-7 ; Clotoide cerchio-rettifilo 450-1
Verifiche parametro A Dati di Progetto Dati di Partenza Parametri di calcolo Raggio 600 B [m] 4,75 Angolo τ1 0,141 XM1 [m] 84,402 Acceleraz. a [m/s2] 0,80 Y M1 [m] 601,980 Distanza (D) 2,0 Vmax [Km/h] 100,00 ΔR1 [m] 1,980 V1 [Km/h] 100,00 L1= (A2/R1) [m] 168,915
V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 38,95 [m] Δimax 1 0,855
iTrasv1 [%] 5,70
Parametro A 318,35 iTrasv2 [%] 2,50
A > 0,021 Vmax2 210,00 A > ((Δh1*R1)/(Δimax1))1/2 165,33
VERO VERO
R1/3 < A < R2 VERO
Ramo di clotoide
Tratto 5a-7 ; Clotoide cerchio-rettifilo 600-2
Verifiche parametro A Dati di Progetto Dati di Partenza
80
TRATTO 7-8
Raggio 350 B [m] 4,75 Angolo τ1 0,180 XM1 [m] 62,933 Acceleraz. a [m/s2] 0,80 Y M1 [m] 351,888 Distanza (D) 1,9 Vmax [Km/h] 100,00 ΔR1 [m] 1,888 V1 [Km/h] 90,00 L1= (A2/R1) [m] 126,003V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 45,13 [m] Δimax 1 0,950
iTrasv1 [%] 7,00
Parametro A 210,00 iTrasv2 [%] 2,50
A > 0,021 Vmax2 210,00 A > ((Δh1*R1)/(Δimax1))1/2 128,94
VERO VERO
R1/3 < A < R2 VERO
Ramo di clotoide
Tratto 7-8 ; Clotoide cerchio-rettifilo 350-1,9
Verifiche parametro A Dati di Progetto Dati di Partenza Parametri di calcolo Raggio 1 (R1) 350 B [m] 4,75 Angolo τ1 0,180 XM1 [m] 62,932 Raggio 2 (R2) 350 Acceleraz. a [m/s2] 0,80 YM1 [m] 351,888 Distanza (D) 14,9 Vmax [Km/h] 100,00 ΔR1 [m] 1,888 V1 [Km/h] 90,00 L1= (A2/R1) [m] 126,000
R2/R1 1,00 V2 [Km/h] 90,00 Δh1 =((B*iTrasv1) 33,25 [m] Δimax 1 0,950
D/R1 0,04 iTrasv1 [%] 7,00
A/R1 (Grafico) 0,60 iTrasv2 [%] 7,00
Parametro A 210,00 Angolo τ2 0,180 XM2 [m] 62,932
YM2 [m] 351,888
ΔR2 [m] 1,888
A > 0,021 Vmax2 210,00 A > ((Δh
1*R1)/(Δimax1))1/2 110,68 L2= (A2/R2) [m] 126,000
VERO VERO Δh2 =((B*iTrasv2) 33,25 [m] Δimax 2 0,950
R1/3 < A < R2 VERO A > ((Δh2*R2)/(Δimax2))1/2 110,68
VERO VERO Angolo ε [gradi] 10,140
Tratto 7-8 ; Clotoide di flesso 350-350
Verifiche parametro A Dati di Progetto Ramo di clotoide n. 2 Dati di Partenza Parametri di calcolo Ramo di clotoide n. 1 Raggio 450 B [m] 4,75 Angolo τ1 0,115 XM1 [m] 51,951 Acceleraz. a [m/s2] 0,80 YM1 [m] 451,000 Distanza (D) 1,0 Vmax [Km/h] 100,00 ΔR1 [m] 1,000 V1 [Km/h] 100,00 L1= (A2/R1) [m] 103,948
V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 44,65 [m] Δimax 1 0,855
iTrasv1 [%] 6,90
Parametro A 216,28 iTrasv2 [%] 2,50
A > 0,021 Vmax2 210,00 A > ((Δh1*R1)/(Δimax1))1/2 153,30
VERO VERO
R1/3 < A < R2 VERO
Ramo di clotoide
Tratto 7-8 ; Clotoide cerchio-rettifilo 450-1
Verifiche parametro A Dati di Progetto Dati di Partenza
81
Raggio 250 B [m] 4,75 Angolo τ1 0,245 XM1 [m] 61,130
Acceleraz. a [m/s2] 0,80 Y
M1 [m] 252,496
Distanza (D) 2,5 Vmax [Km/h] 90,00 limitazione ΔR1 [m] 2,496
V1 [Km/h] 80,00 L1= (A2/R1) [m] 122,505
V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 45,13 [m] Δimax 1 1,069
iTrasv1 [%] 7,00
Parametro A 175,00 iTrasv2 [%] 2,50
A > 0,021 Vmax2 170,10 A > ((Δh1*R1)/(Δimax1))1/2 102,74
VERO VERO
R1/3 < A < R2 VERO
Ramo di clotoide
Tratto 7-8 ; Clotoide cerchio-rettifilo 250-2,5
Verifiche parametro A Dati di Progetto Dati di Partenza Parametri di calcolo Raggio 120 B [m] 4,75 Angolo τ1 0,205 XM1 [m] 24,547 Acceleraz. a [m/s2] 0,80 YM1 [m] 120,838
Distanza (D) 0,8 Vmax [Km/h] 60,00 limitazione ΔR1 [m] 0,838
V1 [Km/h] 60,00 L1= (A2/R1) [m] 49,164
V2 [Km/h] 60,00 Δh1 =((B*iTrasv1) 45,13 [m] Δimax 1 1,425
iTrasv1 [%] 7,00
Parametro A 76,81 iTrasv2 [%] 2,50
A > 0,021 Vmax2 75,60 A > ((Δh1*R1)/(Δimax1))1/2 61,64
VERO VERO
R1/3 < A < R2 VERO
Ramo di clotoide
Tratto 7-8 ; Clotoide cerchio-rettifilo 120-0,8
Verifiche parametro A Dati di Progetto Dati di Partenza Parametri di calcolo Raggio 200 B [m] 4,75 Angolo τ1 0,388 XM1 [m] 77,278 Acceleraz. a [m/s2] 0,80 Y M1 [m] 205,000
Distanza (D) 5,0 Vmax [Km/h] 91,60 limitazione ΔR1 [m] 5,000
V1 [Km/h] 75,00 L1= (A2/R1) [m] 155,334
V2 [Km/h] 100,00 Δh1 =((B*iTrasv1) 45,13 [m] Δimax 1 1,140
iTrasv1 [%] 7,00
Parametro A 176,26 iTrasv2 [%] 2,50
A > 0,021 Vmax2 176,20 A > ((Δh1*R1)/(Δimax1))1/2 88,98
VERO VERO
R1/3 < A < R2 VERO
Ramo di clotoide
Tratto 7-8 ; Clotoide cerchio-rettifilo 200-5
Verifiche parametro A Dati di Progetto Dati di Partenza