Sommario
L’obiettivo del presente lavoro di tesi `e di determinare, prima mediante si-mulazioni numeriche al software e poi mediante sperimentazione, il compor-tamento in condizioni stazionarie di cuscinetti magnetici assiali, costituiti da coppie di magneti permanenti passivi ad anello in repulsione; pi`u speci-ficatamente le condizioni sono quelle in cui l’anello superiore del cuscinetto magnetico `e in rotazione ad una fissata velocit`a, compresa tra 500 giri/min e 3000 giri/min.
Scopo del lavoro `e vedere come cambiano le prestazioni dei cuscinetti rispet-to al caso statico (anello superiore fermo).
Le simulazioni numeriche sono state svolte con un programma agli elementi finiti (Mega), in dotazione al gruppo di ricerca di Elettrotecnica del Dipar-timento di Sistemi Elettrci ed Automazione della facolt`a di Ingegneria di Pisa, specifico per la trattazione di problemi di elettromagnetismo.
Le prove sperimentali invece sono state svolte mediante un’attrezzatura di prova per sospensioni magnetiche passive presso il Dipartimento di Ingegne-ria Meccanica, Nucleare e della Produzione dell’Universit`a di Pisa.
Indice
1 La sostentazione magnetica passiva 7
1.1 Introduzione . . . 7
1.1.1 Storia della sostentazione magnetica . . . 7
1.1.2 Tipi di sospensione magnetica . . . 8
1.1.3 Possibili applicazioni . . . 10
1.2 Magnetismo e magneti permanenti . . . 11
1.2.1 Fisica del magnetismo e dei magneti permanenti . . . 11
1.2.2 Classificazione delle sostanze . . . 12
1.2.3 Magnetizzazione e correnti di magnetizzazione . . . . 13
1.3 Propiet`a dei magneti permanenti . . . 16
1.4 Coercitivit`a e anisotropia . . . 17
1.5 Magneti permanenti in terre rare . . . 20
1.5.1 Dipendenza della magnetizzazione dalla temperatura . 22 1.5.2 Stabilit`a dell’intensit`a di magnetizzazione . . . 26
1.5.3 Tecnologie di produzione per i magneti in terre rare . 29 1.6 Applicazioni dei magneti permanenti . . . 35
1.7 Modellizzazione dei magneti permanenti . . . 39
1.7.1 Introduzione . . . 39
1.7.2 Schematizzazione dei cuscinetti magnetici passivi ad anello . . . 39
1.7.3 Metodo delle correnti superficiali . . . 40
1.7.4 Calcolo delle forze tra una coppia di magneti . . . 41
1.7.5 Calcolo delle forze per cuscinetti assiale a magnetiz-zazione assiale . . . 45
2 Studio del cuscinetto magnetico assiale in condizioni stazionarie 48 2.1 Introduzione . . . 48
2.2 Campi elettromagnetici variabili nel tempo e applicazione al
caso di interesse . . . 49
2.3 Correnti parassite . . . 50
2.3.1 Applicazione al caso di interesse . . . 54
2.4 Simulazione delle prove sperimentali . . . 58
2.5 Conclusioni e commenti alle simulazioni . . . 63
3 Sperimentazione della sospensione magnetica 64 3.1 Introduzione . . . 64
3.2 Verifiche di qualit`a dei magneti . . . 64
3.3 Prove sperimentali . . . 72
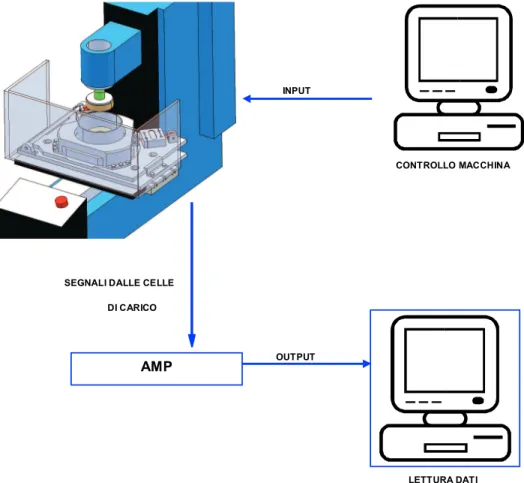
3.3.1 Descrizione e messa a punto dell’attrezzatura . . . 72
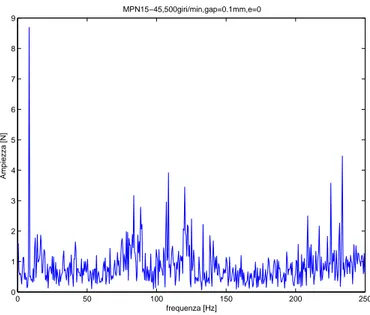
3.3.2 Risultati delle prove in rotazione . . . 76
3.3.3 Analisi dei risultati . . . 84
3.4 Confronti tra prove in rotazione e prove statiche . . . 90
3.5 Confronto tra prove sperimentali e simulazioni numeriche . . 103
3.6 Conclusioni e possibili sviluppi . . . 105
A Risultati sulle misure della densit`a di flusso 110 A.1 Magneti MPN 10-40 . . . 110
A.2 Magnete MPN 15-45 n.2 . . . 116
A.3 Variazioni percentuali della densit`a di flusso (magnete MPN 15-45 n.1) dai valori medi di figura 3.7 . . . 117
B Risultati sugli andamenti dei carichi del cuscinetto MPN 10-40 119 B.1 Carichi e spettri di ampiezza del cuscinetto MPN 10-40 . . . 119 C Risultati sui confronti dei carichi tra prove statiche e in
Introduzione
Avio Spazio fornisce la turbopompa LOx Vinci per Ariane 5. Attualmente Avio `e impegnata nella ricerca di un sistema alternativo di sostentazione dell’albero della turbopompa, sostitutivo dei presenti cuscinetti obliqui a sfere (figura 1).
Da questa esigenza, `e nata la collaborazione tra l’Universit`a di Pisa e Avio, per la ricerca di un sistema ibrido di sostentazione, costituito da cu-scinetti idrostatici e magnetici. I cucu-scinetti idrostatici hanno il compito di supportare le spinte radiali, mentre quelli magnetici hanno il compito di supportare tutti i carichi assiali agenti sull’albero nelle fasi di avvio e di spegnimento della turbopompa; i suddetti carichi infatti, durante il normale funzionamento, sono supportati da un sistema denominato Axial Balancing
System (ABS), il quale utilizza, per la sostentazione, parte del fluido in
pressione spillato dal compressore. Un altro compito della sospensione ma-gnetica `e quello di supportare il carico assiale in caso di malfunzionamento dell’ABS.
Figura 2: Cuscinetto magnetico assiale e sua collocazione sull’albero della turbopompa
Il tipo di sostentazione magnetica adottata `e quella passiva perch`e, sia la temperatura di esercizio (maggiore di 90 K), sia il requisito di leggerezza portano ad escludere la sostentazione con superconduttori e la sostentazione attiva con elettromagneti. L’inconveniente del sostentamento passivo `e l’in-stabilit`a (inl’in-stabilit`a radiale per un cuscinetto magnetico assiale); d’altro canto la sostentazione magnetica passiva presenta i vantaggi di assenza sia di attrito sia di usura, una manutenzione pressoch´e nulla, una notevole sem-plicit`a di realizzazione, con in pi`u un costo ed un peso contenuti.
Scopo del presente lavoro di tesi `e determinare l’effettivo comportamento della sospensione magnetica passiva (capacit`a di carico assiale e radiale) a temperatura ambiente in condizioni stazionarie; pi`u specificatamente nelle condizioni in cui l’anello superiore viene posto in rotazione ad una velocit`a compresa tra 500giri/min e 3000giri/min. Il primo passo quindi `e de-terminare il comportamento della sospensione magnetica passiva mediante simulazioni numeriche. A questo scopo `e stato utilizzato un programma agli elementi finiti, in dotazione al gruppo di ricerca di Elettrotecnica del Dipartimento di Sistemi Elettrci ed Automazione della facolt`a di Ingegneria di Pisa, specifico per la trattazione di problemi di elettromagnetismo. Il secondo passo `e quello di determinare il reale comportamento della sospen-sione magnetica passiva mediante sperimentazione su due coppie di cusci-netti in nostro possesso. Per quanto riguarda le prove, esse sono state svolte con valori di eccentricit`a variabile da 0 a 2 mm, mentre il valore del gap (distanza tra i due magneti) `e stato fatto variare da un massimo di 12 mm, fino ad un minimo di 0.1 mm.
In seguito sono stati effettuati i relativi confronti con i dati teorici ottenu-ti mediante le simulazioni numeriche e con i daottenu-ti sperimentali relaottenu-tivi alla situazione statica (magnete superiore fermo).
Inoltre, si `e verificata la qualit`a dei magneti in nostro possesso misuran-do la densit`a di flusso del campo ~B esterno al magnete su vari punti di
quest’ultimo, mediante il gaussmetro. La misura della densit`a di flusso `e stata suggerita dall’esigenza di avere un’idea del grado di uniformit`a nella magnetizzazione dei magneti costituenti il cuscinetto.
Nel primo capitolo, dopo dei brevi richiami sul magnetismo e sui magneti permanenti, si presentano diffusamente le caratteristiche dei magneti co-stituenti il cuscinetto, le tecnologie di produzione e le possibilit`a di appli-cazione.
L’attenzione verr`a focalizzata sui magneti al neodimio-ferro-boro che pre-sentano oggigiorno le migliori prestazioni per le applicazioni ingegneristiche.
Capitolo 1
La sostentazione magnetica
passiva
1.1
Introduzione
1.1.1 Storia della sostentazione magnetica
L’uso di forze forze magnetiche di attrazione (sospensione magneticha) o di repulsione (levitazione magnetica) permette di realizzare un vero e propio supporto senza contatto.
I progressi nella comprensione dei fenomeni elettromagnetici permisero di chiarire la possibilit`a di usare forze magnetiche per ottenere la levitazione senza contatto,ed allo stesso la difficolt`a garantire la stabilit`a dell’equilib-rio. Questo risultato, diretta conseguenza del teorema di Earnshaw, `e spes-so considerato come la dimostrazione teorica dell’impossibilit`a di ottenere la stabilit`a nella sostentazione magnetica passiva. L’impossibilit`a di levi-tazione stabile non riguarda i materiali diamagnetici e i superconduttori,che quindi possono levitare in modo stabile in un campo magnetostatico. Verso la fine del XIX secolo si realizzarono delle sospensioni magnetiche per ridurre il carico agente su cuscinetti meccanici; tali sospensioni erano stabi-lizzate radialmente da un supporto meccanico (sospensioni ibride).
Solamente con i progressi nel campo dei controlli automatici e dell’elettron-ica fu possibile realizzare sospensioni magnetiche controllate, dotate cio`e di un sistema di sensori che rilevano la posizione dell’oggetto sospeso e di un sistema di controllo in grado di pilotare gli amplificatori di potenza,che alimentano gli elettromagneti di sospensione,in modo da stabilizzarlo nella posizione voluta. Tali sistemi sono necessariamente attivi in quanto
neces-sitano di potenza esterna.
Inizialmente la levitazione magnetica era confinata a poche applicazioni, per la maggior parte in sofisticate attrezzature per la ricerca. L’elettronica, in-fatti, non fu subito in grado di fornire sistemi di controllo di dimensioni contenute e utilizzabili per i sistemi attivi.
Verso la fine degli anni ’80, la scoperta di superconduttori con temper-atura critica molto pi`u elevata di quella dei superconduttori convenzionali (−273◦C), ampli`o i possibili campi di applicazione della levitazione a
super-conduttori. Essi richiedono per`o richiedevano sempre di raggiungere tem-perature molto basse (inferiori ai −100◦C) con sistemi criogenici complessi.
1.1.2 Tipi di sospensione magnetica
Per sospendere o far levitare un corpo, nel campo magnetico di un magnete permanente, `e necessario superare l’instabilit`a predetta dal citato teorema di Earnshaw. Bisogna notare che l’instabilit`a riguarda solamente alcune direzioni. Un magnete permanente in repulsione sopra ad un altro magnete permanente `e stabile in direzione verticale ma instabile in direzione laterale (tende a scivolare lateralmente).
Un’altra caratteristica sfavorevole, della sostentazione magnetica passiva, `e il valore decisamente basso della rigidezza della sospensione, cio`e della variazione della forza di sostentazione con lo spostamento.
Per rimuovere l’instabilit`a dei sistemi magnetici vi sono varie soluzioni che possono essere classificate nel modo seguente:
1. Sospensione ibrida meccanica-magnetica
2. Sospensione a magneti permanenti o a superconduttori 3. Sospensione elettrodinamica
4. Sospensione con stabilizzazione giroscopica 5. Sistemi attivi
1. Le sospensioni ibride sfruttano uno o pi`u supporti meccanici per sta-bilizzare le direzioni che sarebbero naturalmente instabili. Tali con-figurazioni non sono quindi veramente senza contatto e pertanto, se il corpo sospeso `e in moto, si ha comunque usura ed attrito. E’ tuttavia possibile sfruttare le forze magnetiche per ridurre il carico sull’appog-gio meccanico, riducendo ad esempio la resistenza al moto, oppure l’usura, o ancora la necessit`a di usare lubrificanti.
2. La levitazione a magneti permanenti aveva l’inconveniente fondamen-tale di richiedere campi magnetici estremamente intensi per generare forze sufficienti a sospendere oggetti di un certo peso. Comunque, fino a che non si riuscir`a ad introdurre fattori nuovi che eliminino l’insta-bilit`a dei cuscinetti magnetici passivi a magneti permanenti, non `e pensabile un loro utilizzo senza altri dispositivi. Un ulteriore limite `e, come gi`a detto, il basso valore della rigidezza della sospensione. I superconduttori producono forze che,a parit`a di valori del campo ma-gnetico,sono superiori.Gli inconvenienti che ostacolano la diffusione della sospensione magnetica di questo tipo sono soprattutto legati al-la bassa rigidezza delal-la sospensione ed alal-la necessit`a di mantenere il superconduttore a bassissima temperatura.
3. I sistemi elettrodinamici sono basati sulle forze repulsive che si gene-rano tra un magnete permanente, od un elettromagnete, ed un con-duttore in cui siano presenti correnti indotte causate da variazioni di flusso del campo magnetico. Si pu`o far muovere il conduttore su un sistema di magneti fissi o far muovere il magnete sul conduttore, quello che conta `e che ci sia moto relativo.
Gli inconvenienti dei sistemi elettrodinamici, che peraltro stanno trovan-do applicazioni pratiche (il treno a levitazione magnetica giapponese `e basato su un sistema elettrodinamico, con grossi elettromagneti su-perconduttori a bordo e via di corsa conduttrice), sono la necessit`a di avere moto relativo (il treno citato deve partire utilizzando ruote con-venzionali, per poi poter levitare ad una certa velocit`a), la necessit`a di campi magnetici molto intensi e la notevole resistenza al moto causata dalle correnti indotte.
4. `E poi possibile sfruttare la stabilizzazione giroscopica di un magnete permanente rotante che cos`ı pu`o levitare in repulsione sopra un magne-te fisso, ma il sismagne-tema `e stabile solamenmagne-te in un ristretto campo di ve-locit`a di rotazione ed ha una bassissima rigidezza. La spiegazione fisica di una simile levitazione `e, in realt`a, pi`u complessa (non si esaurisce con la stabilizzazione giroscopica), ma `e dubbio che sistemi di questo tipo possano avere applicazioni pratiche.
5. Nei sistemi attivi il corpo sospeso `e ferromagnetico ed `e attirato da un elettromagnete che lo mantiene in sospensione, la configurazione sarebbe quindi instabile se non fosse presente un sistema di controllo. Un sistema di sensori misura la posizione del corpo ed il controllore aumenta la corrente che fluisce nell’elettromagnete se il corpo si
allon-tana, o la diminuisce se il corpo si avvicina oltre la posizione stabilita, causando un aumento o una diminuzione della forza magnetica che riporta il corpo in posizione. Naturalmente un simile sistema richiede una sorgente esterna di potenza e presenta inconvenienti legati a peso, ingombro e anche un maggior costo, spesso non trascurabili, rispetto ad altre soluzioni.
1.1.3 Possibili applicazioni
Le applicazioni pi`u importanti della sospensione senza contatto sono quelle in cui l’oggetto sospeso `e in moto. Il moto pu`o essere di rotazione, come nei cuscinetti magnetici per le macchine rotanti, oppure di traslazione, come nei veicoli a levitazione magnetica. I vantaggi della levitazione magnetica sono in questo caso notevoli. Per prima cosa non vi `e contatto fisico tra parti dotate di moto relativo,pertanto non si ha n´e attrito n´e usura. Si pos-sono quindi raggiungere velocit`a relative anche molto elevate e la potenza richiesta per il moto `e molto minore di quella che si ha nelle soluzioni con-venzionali.
I sistemi attivi di sospensione magnetica, rispetto ai sistemi passivi o a quelli convenzionali, hanno in pi`u la possibilit`a di modificare caratteristiche quali la rigidezza e lo smorzamento semplicemente intervenendo sull’elettronica di controllo, dando al progettista una grande libert`a e rendendo possibili soluzioni che non erano neppure pensabili con le tecnologie convenzionali. Gli svantaggi principali, rispetto ai sistemi passivi ed in particolare ai ma-gneti permanenti, stanno nel maggior costo, ingombro e peso complessivo del sistema (requisito quest’ultimo, di fondamentale importanza in appli-cazioni aerospaziali).
Tutti i sistemi di sostentazione magnetica hanno un costo maggiore dei sis-temi convenzionali a causa del fatto che si tratta di una tecnologia relativa-mente nuova, che non beneficia della riduzione di costi legata alla produzione in grande serie, come avviene, ad esempio, per i cuscinetti a sfere od a rulli. In alcune applicazioni pesa a sfavore la diffidenza, da parte di molti utenti, verso una tecnologia troppo nuova. I sistemi attivi si stanno affermando in vari campi specialistici, grazie anche alla sempre maggior potenza di calcolo ed alle continue riduzioni di costo e di volume dei sistemi digitali, mentre i progressi nella tecnologia di produzione e nella ricerca di nuovi materiali, hanno fatto progredire in modo quasi esponenziale le prestazioni dei magne-ti permanenmagne-ti, al punto che i sistemi di sostentazione magnemagne-tica diverranno sempre pi`u competitivi con i sistemi convenzionali. La possibilit`a di ridurre la resistenza al moto e di aumentare la velocit`a di rotazione, permette la
realizzazione di macchine pi`u compatte, leggere e soprattutto di ridurre i consumi energetici. La riduzione delle esigenze di manutenzione potr`a per-mettere una riduzione dei costi e l’assenza di lubrificanti avr`a sicuramente vantaggi di tipo ambientale.
1.2
Magnetismo e magneti permanenti
1.2.1 Fisica del magnetismo e dei magneti permanenti Le propiet`a locali dei campi elettrici e magnetici costanti nel tempo sono stabilite nel vuoto dalle quattro equazioni di Maxwell:
∇ × ~E = 0 (1.1)
∇ • ~B = 0 (1.2)
∇ × ~B = µoJ~ (1.3)
∇ • ~E = %
ε0 (1.4)
Per spiegare il fenomeno della levitazione magnetica, si deve partire dal-l’osservazione che forze elettromagnetiche si possono sviluppare tra corpi conduttori attraverso quali passa corrente elettrica, tra corpi polarizzati elettricamente, oppure (ed `e il caso che c’interessa) tra corpi magnetizza-ti permanentemente. Gli effetmagnetizza-ti dovumagnetizza-ti alla presenza di un campo magnemagnetizza-tico dipendono, oltre che dall’intensit`a del campo, anche dalla natura del mezzo entro il quale il campo si sviluppa. Fino ad ora infatti, non si `e tenuto conto del mezzo in cui si pu`o trovare immersa la sorgente del campo magnetico ed il valore dell’induzione magnetica `e quello riferito al vuoto. La presenza di sostanze solide, liquide o gassose, in cui la sorgente del campo `e immersa, altera il valore dell’induzione ~B in modo che, se si indica con ~Bo il valore
dell’induzione nel vuoto, il valore di ~B nel mezzo considerato vale: ~
B = µrB~o (1.5)
con µrla permeabilit`a relativa (al vuoto) del mezzo. Talvolta pu`o essere utile fare riferimento ad un’altra grandezza, la suscettivit`a magnetica, indicata col simbolo χm e pari a:
Figura 1.1: Deviazione delle linee di un campo uniforme in presenza di una sostanza diamagnetica
1.2.2 Classificazione delle sostanze
La giustificazione del comportamento di un qualsiasi materiale sotto l’azione di un campo magnetico esterno `e argomento piuttosto complesso. In generale le molecole di una sostanza possono avere un momento di dipolo magnetico diverso da zero come conseguenza:
• del moto degli elettroni atomici sopra le orbite elettroniche
(analoga-mente ad una spira percorsa da corrente, si produce un’induzione ma-gnetica che pu`o essere associata alla presenza di un dipolo magnetico);
• dei momenti magnetici propri posseduti dalle particelle che la
costitu-iscono (principalmente dovuti al momento di spin dei singoli elettroni). Le sostanze sono classificate in base al loro comportamento nei confronti di campi magnetici in cui sono immerse e quindi in base al valore della loro permeabilit`a relativa. Le pi`u note sono le sostanze diamagnetiche (µr< 1),
le paramagnetiche (µr> 1) e le ferromagnetiche (µr>> 1).
All’interno della sostanza, in assenza di un campo magnetico esterno, non esiste una direzione privilegiata in cui sono orientati i vari momenti di dipo-lo ed il momento risultante `e nuldipo-lo. In presenza di un campo esterno di induzione ~B, gli elettroni vengono deviati nelle loro traiettorie ed il
risulta-to `e un momenrisulta-to di dipolo che contribuisce al campo risultante in maniera variabile da sostanza a sostanza.In un campo magnetico omogeneo immerso in aria, la presenza di un corpo diamagnetico produce la deformazione delle linee di flusso rappresentata in figura 1.1. L’entit`a della deviazione delle linee di flusso dipende dal valore della permeabilit`a relativa della sostanza in rapporto a quella del mezzo in cui `e immersa e dall’orientamento del-la sostanza rispetto alle linee del campo esterno. Queste deviazioni sono dovute al fatto che le linee di flusso, immerse in un mezzo con µr = 1 (aria),
Figura 1.2: Deviazione delle linee di un campo uniforme in presenza di una sostanza paramagnetica
Figura 1.3: Deviazione delle linee di un campo uniforme in presenza di una sostanza ferromagnetica
come se incontrassero un ostacolo alla loro propagazione rispetto al mezzo circostante.
Quando le linee di flusso incontrano una sostanza paramagnetica,come il platino l’alluminio o l’aria vengono deviate all’interno della sostanza come rappresentato in figura 1.2. Nelle sostanze ferromagnetiche infine `e parti-colarmente accentuata la tendenza a catturare le linee di campo magneti-co(figura 1.3); il valore della permeabilit`a relativa `e cos`ı elevato che le linee di flusso, anche a distanza, invece di proseguire rettilinee attraverso l’aria, deviano per attraversare la sostanza.
1.2.3 Magnetizzazione e correnti di magnetizzazione
I modelli con cui si rappresentano le propriet`a magnetiche delle sostanze sono due: il modello che si basa sul concetto di dipolo magnetico e quello che si basa sul modello delle correnti. In base al primo modello, l’intensit`a di magnetizzazione ~M della sostanza dipende dalla densit`a di dipoli
ma-Figura 1.4: Cilindro di sostanza magnetizzata uniformemente
gnetici presenti alle due estremit`a del magnete, mentre in base al secondo,
~
M dipende dalla risultante dei momenti magnetici molecolari, assimilabili
a spire microscopiche di corrente elettrica. Come `e noto, infatti, in base a questo secondo metodo, una sostanza magnetizzata pu`o essere considerata come percorsa da una densit`a di corrente di magnetizzazione la cui inten-sit`a `e legata all’inteninten-sit`a di magnetizzazione ~M . In generale, esiste sia una
densit`a di corrente di magnetizzazione di volume che di superficie, ma se la magnetizzazione della sostanza `e uniforme, la corrente risultante di volume `e nulla (figura 1.4) e si ha solo una corrente di magnetizzazione superficiale. In definitiva, nel caso pi`u generico, l’induzione magnetica ~B, generata
da un materiale magnetizzato, dipende sia dalle correnti di conduzione che da quelle di magnetizzazione e si pu`o scrivere che:
∇ × ~B = µo( ~Jcond+ ~Jmagn) (1.7)
con ~Jcond la densit`a delle correnti di conduzione e ~Jmagn = ∇ × ~M le
correnti di magnetizzazione.
Introducendo il vettore campo magnetico ~H,detto intensit`a magnetica,si
ricava che:
∇ × ~H = ~Jcond (1.8)
~
B = µo( ~H + ~M ) (1.9)
La (1.9) `e fondamentale nello studio dei magneti permanenti,essendo il campo ~B solenoidale (equazione (1.2)), si pu`o dimostrare che, mentre
all’esterno del magnete ~B ed ~H sono equiversi ~B = µ ~H, all’interno hanno
Figura 1.5: Campi B, H e M di un magnete
Come si vede, il campo ~B `e analogo a quello generato da un solenoide
in cui le correnti dell’avvolgimento sono sostituite dalle correnti di magne-tizzazione e di conduzione del materiale, mentre il campo ~H `e analogo a
quello generato da un dipolo, ovvero, `e come se sulle due facce di estremit`a del magnete fossero presenti due densit`a di cariche (di segno opposto) che rappresentano i poli nord e sud del magnete.E’ importante sottolineare che, mentre all’esterno del magnete le linee di flusso di ~B coincidono con quelle
di ~H, all’interno hanno verso opposto. Per questo motivo, il campo ~H
in-terno `e noto anche come campo smagnetizzante (perch´e tende a ridurre la magnetizzazione ~M come rappresentato in figura 1.6).
Figura 1.6: Campi B e H all’interno e all’esterno di un magnete di un magnete
Figura 1.7: Curva di isteresi di un magnete nel piano B-H
Figura 1.8: Curva di isteresi di un magnete nel piano M-H
1.3
Propiet`
a dei magneti permanenti
I materiali ferromagnetici hanno la caratteristica di poter essere magnetizza-ti in modo permanente,tramite l’applicazione di un campo magnemagnetizza-tico esterno che pu`o essere prodotto da un altro magnete permanente o da un elettro-magnete.Le propriet`a magnetiche di un materiale sono individuate dalla sua curva di isteresi ed in particolare dalla sua curva di smagnetizzazione (figura 1.7 e 1.8). Le intersezioni di questa curva con gli assi, nei piani H-M o H-B, individuano grandezze di fondamentale importanza per la valutazione delle prestazioni di ogni magnete.
Di particolare interesse, per le applicazioni ingegneristiche, sono i valori dell’induzione residua Br e della forza coercitiva Hc. Dal quadrato del
pri-mo dipende la forza magnetica di repulsione tra magneti,mentre il secondo rappresenta l’intensit`a del campo esterno, necessario a smagnetizzare il
ma-Figura 1.9: Variazione della permeabilit`a col campo esterno
gnete. Al fine di comprendere meglio le considerazioni che saranno fatte nel seguito, a proposito della capacit`a di carico dei cuscinetti magnetici passivi, `e importante sottolineare anche un altro aspetto. Come si `e visto, nei mate-riali ferromagnetici la funzione che lega l’induzione con il campo magnetico (legame B - H) non `e rappresentabile con una retta (come invece potrebbe far pensare il legame: ~B = µ0(1 + χm) ~H = µ ~H). Questo `e da imputare al
fatto che la permeabilit`a magnetica non resta costante al variare del campo magnetico, ma ha un andamento che `e rappresentato qualitativamente in figura 1.9, per la curva di prima magnetizzazione. In figura 1.10 `e ripor-tato il secondo quadrante del piano B-H per diversi materiali per magneti permanenti: si pu`o vedere come, l’ultima generazione di materiali magnetici in terre rare al neodimio-ferro-boro (Nd2Fe14B), abbia portato un notevole incremento nei valori di induzione residua e forza coercitiva.
I materiali di comune impiego per la realizzazione di magneti permanenti sono: i ceramici a base di ferriti, le leghe a base di Al - Ni - Co ed i composti a base di terre rare (samario - cobalto e neodimio-ferro-boro). Nei paragrafi seguenti l’attenzione sar`a concentrata sui materiali a base di terre rare, in particolare sui composti a base di neodimio, di cui sono costituiti gli anelli del cuscinetto magnetico.
1.4
Coercitivit`
a e anisotropia
Come gi`a accennato, la forza coercitiva rappresenta l’intensit`a del campo necessaria per annullare la magnetizzazione presente nel materiale.
orie-Figura 1.10: Curva di smagnetizzazione per diversi tipi di magneti permanenti
ntamento della magnetizzazione. Passando da un dominio magnetizzato a quello adiacente, non vi `e un salto nell’orientamento, ma la rotazione avviene gradualmente attraverso lo spessore di confine tra i domini (figura 1.11). Quando si applica un campo esterno smagnetizzante, i singoli vettori di magnetizzazione tendono ad allinearsi col campo e le pareti dei domi-ni concordi col campo esterno, si spostano verso i domidomi-ni con orientamento diverso. Se il valore della forza coercitiva `e basso, questi movimenti sono dif-ficili da impedire e quindi, per aumentare la resistenza alla smagnetizzazione, si deve aumentare il valore della forza coercitiva. Alla base di questa impor-tante propriet`a dei magneti c’`e l’anisotropia del materiale che determina la presenza di forze che si oppongono alla rotazione dei singoli vettori di ma-gnetizzazione. Queste forze possono avere origine da un’anisotropia a livello atomico (da cui deriva un’anisotropia a livello cristallino), dalla forma data ai grani (anisotropia del materiale), o dalla presenza di un carico esterno (ma generalmente questa ultima tipologia `e del tutto trascurabile rispetto alle altre).
Per quanto riguarda l’anisotropia a livello atomico, per un singolo ione ques-ta ha origine dall’accoppiamento tra i momenti di spin e di orbiques-ta. Questo pu`o accadere per quegli orbitali che sono stabilizzati dal campo elettrostati-co creato in elettrostati-corrispondenza dell’atomo elettrostati-considerato, dal resto del retielettrostati-colo cristallino. Di conseguenza il momento atomico ha orientazioni preferen-ziali, dette anche direzioni facili, lungo cui si dispone per minimizzare la sua energia. L’anisotropia cristallina, che si ottiene sommando tutti i
contribu-Figura 1.11: Schematizzazione del piano di transizione tra domini adiacenti magnetizzati in direzioni differenti
ti dei singoli ioni che formano il cristallo, riflette la simmetria globale del cristallo. Quindi possiamo affermare che esistono direzioni di facile magne-tizzazione e direzioni di difficile magnemagne-tizzazione all’interno del materiale. In figura 1.12 `e evidenziata qualitativamente la differenza tra una magnetizza-zione ottenuta con un campo parallelo ad un asse di facile magnetizzamagnetizza-zione e una magnetizzazione ottenuta con un campo parallelo ad un asse di ma-gnetizzazione difficile, a parit`a di campo magnetizzante Ha applicato.
In definitiva, ruotare il vettore magnetizzazione da una direzione facile ad una difficile richiede un elevato campo smagnetizzante, infatti, cos`ı facendo, si tende ad allontanare il cristallo da una condizione di minima energia. Da quanto detto si intuisce l’importanza dell’anisotropia cristallina in relazione alla forza coercitiva.
Da ci`o derivano tutte le sofisticate tecniche di produzione dei magneti perma-nenti,che saranno esaminate pi`u avanti. Tali tecnologie mirano ad allineare tutti i cristalli in modo che le loro direzioni di facile magnetizzazione risulti-no parallele e dirette come il verso di magnetizzazione da conferire.
Un altro aspetto cui abbiamo accennato `e come la forma data ai grani,possa influire sulla forza coercitiva. Infatti, se il grano `e allungato nella direzione di magnetizzazione, il fattore di smagnetizzazione nella direzione del gra-no `e migra-nore di quello nelle altre direzioni e si viene a creare un effetto di
Figura 1.12: Differenza qualitativa nella magnetizzazione ottenibile tra un campo esterno parallelo ed uno perpendicolare alla direzione di magnetizzazione facile
anisotropia indotto dalla forma dei grani. E’ per questo motivo che, nel-la produzione dei materiali per magneti permanenti, si tende a creare una struttura a grani molto allungati nella direzione di magnetizzazione facile. Si pu`o ottenere un materiale anisotropo pressando le polveri sotto l’azione di un campo magnetico in modo da allineare in modo equivalente tutti i domi-ni, oppure, se si conferisce la forma per fusione, mediante un raffreddamento direzionale che ne ostacoli il libero spostamento.
1.5
Magneti permanenti in terre rare
Di seguito si riportano i valori di tutte le grandezze fondamentali che carat-terizzano un magnete, compreso il prodotto energetico (BHmax). Il valore
di BHmax nel piano B-H rappresenta l’area del rettangolo, di area massima,
delimitato dagli assi B ed H e dalla curva di smagnetizzazione. Il vertice di questo rettangolo, che giace sulla curva di smagnetizzazione, corrisponde al punto di lavoro ottimale.
Dalla tabella si vede come sia incrementato il prodotto energetico mas-simo con le ultime generazioni di materiali in terre rare (Sm-Co, ma soprat-tutto Nd-Fe-B). Tutti i valori sono aggiornati al 1996, ma ad oggi, in 6 anni, il prodotto energetico dei magneti commerciali in terre rare al neodimio fer-ro bofer-ro, `e arrivato a valori superiori a 400kJ/m3, con valori dell’induzione
residua vicini ad 1.5 tesla e forze coercitive Hc superiori a 1100 kA/m.
I magneti utilizzati in quest’applicazione, sono ottenuti per sinterizzazione di polveri finissime di neodimio, ferro e boro (il composto pi`u noto `e Nd2Fe14B)
Figura 1.13: Grandezze di interesse per diversi tipi di magneti permanenti
cio`e un materiale a base di terre rare.
Il termine terre rare deriva dal fatto che, in origine, gli elementi classificati come terre rare erano difficili e costosi da separare e raffinare e non perch´e fossero effettivamente scarse in natura. Gi`a da molti anni si sono ridotte le difficolt`a (ed i costi) di separazione e la loro presenza nel mercato dei ma-gneti permanenti `e ormai molto diffusa. Le terre rare sono quegli elementi che, con i numeri atomici da 58 (Ce - Cerio) a 71 (Lu - Lutezio), formano un gruppo di transizione simile ma pi`u complicato di quello contenente Fe, Ni e Co.
In questi elementi il guscio pi`u interno, 4f, ha un numero di elettroni variabile da un elemento all’altro. Gli elettroni di questo guscio interno sono fonda-mentali nel determinare il comportamento magnetico che, quindi, varia col tipo di elemento. Com’`e noto,le propriet`a magnetiche della materia dipen-dono sia dalla rotazione dei singoli elettroni attorno a s´e stessi (spin), sia dalla rotazione dei singoli elettroni lungo le loro orbite. Negli atomi delle terre rare leggere, cio`e da Ce a Eu (Europio), il momento magnetico orbitale `e pi`u grande del momento magnetico di spin ma antiparallelo. Quindi, in-dicando con L il momento angolare orbitale e con S il momento angolare di spin, il momento angolare risultante `e dato da:
J = L − S (1.10)
Nelle terre rare pesanti, da Tb (terbio,65) a Yb (itterbio,71), i momenti di spin ed orbitali sono concordi e determinano valori molto alti del momento angolare totale alle temperature dell’elio liquido. Per le terre rare pesanti vale:
J = L + S (1.11)
Saremmo, quindi, portati a pensare che le terre rare pesanti siano le migliori per la realizzazione di materiali per magneti permanenti, ma non `e cos`ı. Sfor-tunatamente infatti, il comportamento magnetico allo stato naturale della
maggior parte delle terre rare non `e ferromagnetico. Da questo deriva la necessit`a di realizzare leghe di terre rare con i metalli (ferromagnetici) di transizione, cio`e Fe, Co o Ni, per realizzare materiali adatti a diventare ma-gneti permanenti. Quello che accade, per`o, nei composti terra rara pesante-metallo ferromagnetico, indicati anche come composti R-T (R=terra rara; T=metallo ferromagnetico di transizione), `e che i momenti di spin dell’ele-mento R e del T risultano opposti. Infatti, nelle leghe di terre rare pesanti, il J della terra rara `e antiparallelo a quello del metallo, risultando una lega di materiale ferrimagnetico con bassi valori della magnetizzazione di satu-razione. Nelle leghe di terre rare leggere, invece, anche se il J `e pi`u basso (J = L - S), va comunque a sommarsi a quello forte del metallo, come mostrato nella figura 1.14, ed il comportamento risulta ferromagnetico invece che fer-rimagnetico. In questo modo si raggiungono livelli di magnetizzazione utili per le applicazioni.
Figura 1.14: Rappresentazione della struttura magnetica dei composti R-T
Il samario (Sm) `e particolarmente adatto a combinarsi con il cobalto per formare un cristallo ad elevata anisotropia (propriet`a del materiale che determina il valore della forza coercitiva ). I primi magneti prodotti con questi elementi sono stati a base di SmCo5, seguiti da Sm2Co17.
Il successo ottenuto dai primi magneti Sm-Co, era per`o in parte velato dalla reperibilit`a e costo dei due elementi principali. L’attenzione si rivolse quindi verso il ferro, pi`u economico del cobalto e, dopo vari tentativi di combinazione con le terre rare, si scopr`ı che il neodimio (Nd), con aggiunta di boro, dava la migliore combinazione di propriet`a sia magnetiche che ter-miche. In figura 1.15 sono riportate le caratteristiche di smagnetizzazione misurate a diverse temperature tipiche di un magnete al neodimio (si osserva l’incremento nelle propriet`a magnetiche rispetto ai magneti Sm-Co).
1.5.1 Dipendenza della magnetizzazione dalla temperatura Come si `e visto al variare della temperatura, le curve di smagnetizzazione, pur mantenendo pressoch´e inalterata la loro forma, si spostano. In termi-ni di propriet`a magnetiche, possiamo dire che al variare della temperatura, variano sia l’induzione residua che la forza coercitiva. In particolare, un
Figura 1.15: Curve di smagnetizzazione per il SmCo5 (figura (a)) e per il Nd2Fe14B (figura (b))
Figura 1.17: Dipendenza magnetizzazione-temperatura per un magnete in Nd2Fe14B (Tc = temperatura di Curie; Tst = transizione di spin-tilt)
aumento nella temperatura provoca una maggiore mobilit`a dei domini, un maggiore disordine e una diminuzione del grado di anisotropia del materiale (diminuzione della forza coercitiva). Il risultato `e una diminuzione dell’in-tensit`a di magnetizzazione. Continuando ad aumentare la temperatura, si arriva ad un punto in cui l’agitazione termica `e tale che i vari dipoli hanno un orientamento casuale e determinano una risultante nulla. Tale valore della temperatura `e definito temperatura di Curie, a cui corrisponde un’inten-sit`a di magnetizzazione nulla. In figura 1.17 `e riportato l’andamento della magnetizzazione, in funzione della temperatura in ◦K, per un particolare
magnete in terre rare Nd2Fe14B.
Nella figura 1.18 si riportano nuovamente le curve di smagnetizzazione di un magnete Nd2Fe14B. Andando a tracciare l’andamento dei valori della
Br, al variare della temperatura, otteniamo il grafico di figura 1.19
Si osserva che esiste una temperatura (nel caso di figura coincidente con 200◦C circa) oltre la quale la diminuzione della B
r avviene molto
rapida-mente. Questa temperatura rappresenta il limite tra perdite reversibili e irreversibili e coincide con la condizione per cui il ginocchio della curva di smagnetizzazione ricade sull’asse H = 0 (si veda la figura 1.19). La pen-denza della prima parte della curva di figura 1.20, coincide con il reversible
temperature coefficient of Br che indica la perdita percentuale (reversibile)
di induzione, per grado d’aumento di temperatura.
D’altra parte, dalla figura 1.18, si osserva anche che, diminuendo la tem-peratura, cresce l’intensit`a di magnetizzazione (fino ad un valore di sat-urazione). Il cuscinetto assiale oggetto di questo studio, dovendo lavorare immerso in ossigeno liquido ad una temperatura di -180◦C (all’incirca 93◦K),
Figura 1.18: Curve di smagnetizzazione tipiche per un magnete in Nd2Fe14B
Figura 1.19: Andamento dell’induzione residua con la temperatura per il magnete al neodimio di figura 1.18
nelle previsioni avr`a una capacit`a di carico sicuramente maggiore di quella che si pu`o calcolare a temperatura ambiente. Nelle prove in cui si porr`a in rotazione l’anello superiore si dovr`a prestare particolare attenzione al riscal-damento dei magneti dovuto alla nascita di correnti parassite (di ci`o se ne parler`a nel secondo capitolo).
1.5.2 Stabilit`a dell’intensit`a di magnetizzazione
Un altro aspetto che `e importante tenere nella dovuta considerazione, `e la stabilit`a della magnetizzazione di un magnete permanente. Per stabilit`a di magnetizzazione s’intende sotto quali condizioni e per quanto tempo, il magnete manterr`a le prestazioni richieste dalla particolare applicazione. I fattori che possono influenzare la stabilit`a di un magnete sono i seguenti:
• Tempo
L’effetto del tempo sui moderni magneti permanenti `e minimo. I ma-gneti in terre rare generalmente non risentono di questo fenomeno a causa della loro elevata coercivit`a.
• Temperatura
Gli effetti della temperatura possono essere suddivisi in tre categorie: 1. Perdite reversibili
Sono quelle perdite che si recuperano riportando il magnete a temperatura ambiente. L’entit`a delle perdite nell’induzione resid-ua e nella coercivit`a dipendono dal materiale e sono qresid-uantificabili come punti percentuali per grado di temperatura. Come gi`a in-dicato al paragrafo precedente, tale coefficiente coincide con la pendenza del primo tratto della curva di figura 1.17 e si indica con T∗
c (per distinguerlo dalla temperatura di Curie). Nella
figu-ra 1.20 si riportano il valore di T∗
c dei magneti in terre rare (Nd
o Sm) a confronto con i principali materiali per magneti perma-nenti. Come si vede, i coefficienti T∗
c di Br ed Hcdifferiscono tra
loro. Di conseguenza, mentre a temperatura ambiente la curva di smagnetizzazione `e approssimativamente una retta (lo `e per il Nd2Fe14B), all’aumentare della temperatura, la curva, mante-nendo la pendenza del tratto reversibile, sviluppa un ginocchio perch´e le variazioni di Br ed Hc non coincidono.
2. Perdite irreversibili ma recuperabili
Alcune perdite dovute all’esposizione ad alte o basse temperature sono irreversibili riportando il materiale a temperatura ambiente
Materiale Tc * (Br) % / °C Tc*(Hc) % / °C NdFeB -0.12 -0.6 SmCo -0.04 -0.3 Alnico -0.02 0.01 Ceramici -0.2 0.3
Figura 1.20: Reversible Temperature Coefficient Tc∗ per Br e Hc
e possono essere recuperate solo rimagnetizzando il materiale a temperatura ambiente. Queste perdite si hanno quando l’escur-sione di temperatura `e avvenuta con il punto di lavoro posto al di l`a del ginocchio della curva di smagnetizzazione. E’ buona regola, quindi, non lavorare mai in prossimit`a del ginocchio della curva, specialmente se sono previste elevate temperature.
3. Perdite irreversibili irrecuperabili
Questo avviene se si raggiunge e si supera la temperatura di Curie; il risultato `e che il magnete `e completamente smagnetiz-zato.
• Corrosione
Altre cause di smagnetizzazione a lungo termine, irreversibili e irrecu-perabili, sono rappresentate da un’alterazione nella struttura metal-lurgica o, pi`u specificatamente, dall’ossidazione del materiale.
La velocit`a di degrado delle prestazioni del magnete ha una dipendenza fortemente non lineare dalla temperatura, ma si pu`o individuare una temperatura massima di lavoro al di sopra della quale, un magnete non rivestito, presenta un tasso di corrosione tale da comprometterne sensibilmente le prestazioni.
• Variazioni nella riluttanza
Un ulteriore causa di perdite `e quella legata a variazioni della rilut-tanza nel percorso del campo magnetico lungo un circuito magnetico. Un esempio `e la variazione delle dimensioni del gap di aria tra le parti che costituiscono il circuito magnetico. Questi cambiamenti provocano una variazione della riluttanza del circuito e, quindi, una variazione dell’inclinazione della retta di carico. La retta di carico `e quella retta che unisce il punto di lavoro, sulla curva di smagnetizzazione,
all’orig-ine degli assi nel piano B - H (figura 1.21). La sua pendenza dipende
Figura 1.21: Retta di carico e punto di lavoro
dalla geometria del magnete e dal gap di aria facente parte del circuito magnetico. Il risultato `e che il punto di lavoro si sposta pi`u in basso e, se supera il ginocchio della curva di smagnetizzazione, si possono avere delle perdite (anche solo parziali) irreversibili. L’entit`a di queste perdite dipende dalle propriet`a del materiale e dall’entit`a di variazione della riluttanza.
• Campi smagnetizzanti esterni
Un fenomeno di smagnetizzazione, che interessa particolarmente i ma-gneti utilizzati per la realizzazione di cuscinetti mama-gnetici passivi, `e quello legato ai campi H esterni. In un cuscinetto magnetico, infatti, i magneti sono posti in modo da respingersi tra loro, ovvero i versi di magnetizzazione sono in opposizione. Quello che accade `e che il campo H esterno di un magnete penetra nell’altro,andando a sommarsi al suo campo smagnetizzante interno. Il punto di lavoro di ogni magnete, di conseguenza, si sposta pi`u in basso nella curva di smagnetizzazione, abbassando cos`ı l’intensit`a di magnetizzazione (o l’induzione residua). La diminuzione di magnetizzazione viene recuperata allontanando i magneti e quindi il processo `e reversibile. L’irreversibilit`a si ha quan-do il punto di lavoro si avvicina troppo al valore della forza coercitiva. In questo caso si percorre la parte non lineare della curva di smagnetiz-zazione (il ginocchio della curva) e si possono avere smagnetizzazioni (non necessariamente di tutto il magnete, ma anche soltanto localiz-zate in alcuni punti in cui il campo `e pi`u intenso) che possono essere recuperate solo rimagnetizzando il materiale (ovvero applicando un campo esterno magnetizzante a temperatura ambiente).
I magneti in terre rare con le pi`u alte forze coercitive (superiori ai 1000kA/m) difficilmente risentono di perdite irreversibili, mentre gli
Figura 1.22: Rappresentazione schematica di una fornace a induzione
altri materiali, in presenza di forze magnetiche repulsive, possono andare incontro a smagnetizzazioni.
• Radiazioni
• Urti, sollecitazioni e vibrazioni
1.5.3 Tecnologie di produzione per i magneti in terre rare A differenza dei loro predecessori basati sul Sm-Co, le leghe al Nd-Fe-B possono seguire molti processi differenti per essere trasformate in magneti permanenti.
La tecnologia principale di produzione dei magneti al neodimio, si basa su numerose varianti della metallurgia delle polveri (la maggior parte di ma-gneti al neodimio sono sinterizzati). La polvere pu`o essere monocristallina o policristallina.
Il punto di partenza `e sempre la produzione della lega base, nella forma di lingotti o polvere che si ottengono per fusione in fornace a induzione (figura 1.22).
• Ciclo di lavorazione della polvere monocristallina
possi-bilit`a di realizzare una grande variet`a di forme che possono poi essere lavorate con le tolleranze finali. Lo svantaggio maggiore, per il Nd-Fe-B, `e che le polveri di terra rara e metallo di transizione sono molto reattive e si ossidano rapidamente, in particolare in ambiente umido. Questo implica che la produzione e gestione delle polveri deve avvenire in ambiente controllato, con conseguente significativo aumento nel cos-to finale.
Le varie fasi di produzione sono riassunte in figura 1.23. Il processo
Figura 1.23: Fasi di produzione di magneti da polvere monocristallina
inizia con una frantumazione dapprima grossolana (coarse crushing) e successivamente sempre pi`u fine (jet milling), della lega ottenuta per fusione (ingot material). La frantumazione avviene mediante una macchina che utilizza sfere di acciaio indurito ed un solvente (cicloe-sano C6H12) per limitare l’ossidazione, oppure attraverso una frantu-matrice a getto (jet milling). Ottenuta la polvere fine, questa viene allineata magneticamente e compressa (aligning + pressing) in modo da ottenere dei blocchi, con densit`a 60%, e pronti alla sinterizzazione. I blocchi possono essere magnetizzati e compressi lungo la stessa di-rezione o lungo direzioni ortogonali tra loro o isostaticamente (figure 1.24).
press-Figura 1.24: Compattazione e magnetizzazione di magneti (direzione della pressione (freccia rossa) rispetto alla magnetizzazione (freccia blu)
ing) per i magneti di forma cilindrica o ad anello, il secondo (perpen-dicular alignment pressing) per forme prismatiche o cubiche di
dimen-sioni contenute, l’ultimo (isostatic pressing) `e pi`u adatto per prismi o cubi di dimensioni maggiori. Durante questi processi il materiale `e compattato e vengono allineati tutti i dipoli magnetici. La magne-tizzazione del materiale avviene mediante esposizione ad un campo magnetico generato da un magnete o, pi`u spesso, da un elettromag-nete. Il campo esterno che si applica `e proporzionale al valore della forza coercitiva del materiale da magnetizzare, quindi `e pi`u alto per i materiali al neodimio - ferro - boro. In base alla particolare appli-cazione, il materiale viene magnetizzato, con una certa accuratezza, lungo certe direzioni piuttosto che altre. Queste direzioni possono, o no, coincidere con gli assi di simmetria geometrica del magnete. Na-turalmente, per materiali anisotropi la direzione di magnetizzazione coincider`a con quella di anisotropia del materiale, mentre i materiali isotropi possono essere magnetizzati in ogni direzione. Nella figura 1.25 sono rappresentate le geometrie maggiormente diffuse, insieme a tutte le possibili magnetizzazioni del prodotto finito. Dopo l’allinea-mento magnetico, i blocchi compattati sono riscaldati nella fornace di sinterizzazione (sintering) in argon puro. Sono mantenuti ad una opportuna temperatura Ts (prossima a 1000◦C) per un’ora, prima del
raffreddamento a temperatura ambiente.
Le propriet`a magnetiche dei magneti sinterizzati dipendono critica-mente dalla loro storia termica. Una tempra che parta dalla tem-peratura Ts, provoca un degrado delle propriet`a magnetiche rispetto
ad un raffreddamento lento. La differenza sostanziale tra un mate-riale raffreddato lentamente ed un altro temprato `e che nel secondo
Parallelamente alla larghezza Parallelamente al diametro
Parallelamente alla lunghezza
Parallelamente alla lunghezza
Parallelamente allo spessore
Parallelamente allo spessore
2 Poli / 1 Faccia Parallelamente al diametro
Poli multipli su una faccia 4 Poli sul diametro esterno
Figura 1.25: Possibili direzioni di magnetizzazione
decresce il valore della coercivit`a nel tempo, mentre nel primo non si osserva lo stesso degrado. Si `e, comunque, osservato che una ricottura a 600◦C circa (heat treatment) conferisce le migliori propriet`a
indipen-dentemente dal raffreddamento iniziale subito dal materiale.
I magneti sinterizzati possono essere lavorati (machining), per con-ferire la forma desiderata, utilizzando una mola e fluido non reattivo. Metodi alternativi sono: elettroerosione (forme complesse) e fresa cir-colare (produzione di pezzi da grandi blocchi sinterizzati). Il passo finale, nel processo di produzione, consiste nel rivestimento dei ma-gneti sinterizzati (coating), necessario a causa della scarsa resistenza a corrosione del Nd-Fe-B. Lo strato protettivo deve essere abbastanza
sottile da non falsare il valore del gap di aria del circuito magnetico e abbastanza spesso per assicurare una protezione sufficiente. Il rives-timento deve essere, inoltre, esente da pori o cricche, deve presentare superficie liscia che abbia una buona adesione al substrato, deve essere impermeabile ai gas e all’umidit`a ed avere un’opportuna stabilit`a con la temperatura.
• Ciclo di lavorazione della polvere policristallina
La polvere policristallina `e costituita da granelli contenenti molti grani, ognuno di dimensioni inferiori al µm, che possono essere contigui o se-parati da una fase di bordo di grano.
Esistono diverse tipologie di ciclo di lavorazione per il Nd-Fe-B par-tendo da simili granelli. Questo materiale pu`o essere mescolato a resina epossidica o gomma e modellato in diverse forme, oppure combinato con un polimero termoplastico come il nylon e utilizzato per realizzare forme complesse per injection molding.
Un processo di produzione diretto che non aveva precedenti, nella pro-duzione di magneti permanenti, prima del Nd-Fe-B `e la fusione cen-trifuga. Nella fusione centrifuga, un getto di lega liquefatta `e spruzzato su una ruota di rame, in rapida rotazione e raffreddata ad acqua, in cui il liquido solidifica ad una velocit`a fino a 106◦K/s e ne fuoriesce
nella forma di fiocchi fini. Nel caso del Nd-Fe-B, i fiocchi si spezzano in parti pi`u piccole a causa della fragilit`a della lega. Le propriet`a fisiche del singolo fiocco dipendono dalla velocit`a di tempra, e quindi dalla velocit`a di rotazione della ruota, e dalla temperatura iniziale della lega fusa. In particolare, si `e verificato che sussiste una forte dipendenza della coercivit`a dalla velocit`a di rotazione della ruota.
Il processo di produzione standard, prevede di temprare, e successi-vamente invecchiare, i fiocchi per ottenere la dimensione dei grani e la coercivit`a richieste. I fiocchi hanno uno spessore di circa 30mm ed una tipica dimensione media, per il grano dei fiocchi che hanno subito invecchiamento, di circa 50nm, ovvero cento volte pi`u piccola della dimensione dei grani dei magneti sinterizzati. Il fiocco che si ottiene da fusione centrifuga `e magneticamente isotropo ed `e la base di vari magneti commerciali. In figura 1.26 sono confrontate le curve di prima magnetizzazione ed i cicli di isteresi dei magneti prodotti per sinteriz-zazione e per fusione centrifuga. La curva di prima magnetizsinteriz-zazione del sinterizzato sale rapidamente per bassi valori di H, per poi arrivare quasi subito a saturazione, a differenza dell’altro la cui curva sale pi`u lentamente ma costantemente fino a saturazione. Un comportamento
Figura 1.26: Isteresi magnetica per un magnete al neodimio ottenuto per sinterizzazione o per fusione centrifuga
Figura 1.27: Dimensione dei grani sintered (a) e melt-spun (b)
simile `e tipico dei magneti isotropi ed `e dovuto ad un orientamento casuale dei grani e alla loro dimensione molto ridotta (figura 1.27). I valori pi`u alti della coercivit`a dei magneti al Nd-Fe-B, sono stati rica-vati per quelli prodotti mediante fusione centrifuga, con valori superi-ori a 1200kA/m; mentre la coercivit`a dei magneti Nd-Fe-B sinterizzati `e tipicamente 1000kA/m.
I valori pi`u alti del prodotto energetico, fino a 430kJ/m3, sono stati
ottenuti per i magneti sinterizzati al Nd-Fe-B. Il prodotto energeti-co degli altri, invece, `e molto inferiore (96kJ/m3) ancora a causa del
fatto che tale materiale, normalmente, `e isotropo.Vantaggi sono una produzione pi`u rapida ed una maggiore flessibilit`a nelle dimensioni e
nella forma, dato anche che il campo magnetizzante da applicare, non deve avere una direzione preferenziale.
Il coefficiente di temperatura T∗
c, relativo alla coercivit`a dei magneti
isotropi, `e significativamente migliore di quello dei magneti anisotropi, prodotti con la tecnologia convenzionale delle polveri.
• Fusione e lavorazione a caldo
Uno dei metodi pi`u efficaci per abbattere il costo di produzione dei magneti Nd-Fe-B anisotropi, sarebbe quello di fonderli nella forma di lastre costituite da grana fine, con asse di anisotropia ortogonale al pia-no della singola lastra. Sfortunatamente, la direzione di anisotropia, per il materiale fuso, non `e perfettamente uniforme per ottenere ma-gneti da materiale fuso con valori elevati del prodotto energetico, `e necessario sottoporre le leghe ad una deformazione a caldo, come es-trusione a caldo o rullatura a caldo.
Si producono, invece, mediante semplice fusione, magneti basati su Nd2Fe14C con Br di circa 0.61T, Hc di circa 600kA/m e BHmax di
circa 61kJ/m3.
L’ovvio vantaggio del processo di produzione per fusione e successiva lavorazione a caldo, `e che non presenta gli inconvenienti legati alla ges-tione di materiali in polvere molto fine, che pu`o essere contaminata ed `e sensibile a corrosione, con conseguenti inferiori costi di produzione. Gli svantaggi includono la necessit`a di processi di deformazione ad ele-vate temperature, un controllo ridotto sull’orientamento del materiale rispetto all’allineamento magnetico (asse di anisotropia), e forme pi`u limitate.
1.6
Applicazioni dei magneti permanenti
Le forze agenti tra magneti permanenti sono sfruttate nei cuscinetti ma-gnetici, accoppiamenti magnetici e dispositivi di afferraggio o bloccaggio (figure 1.28 e 1.29). Per tutte queste applicazioni, gli effetti (forza e tor-sione) dipendono dal quadrato della magnetizzazione del magnete perma-nente. Se, in un accoppiamento magnetico, si sostituisce ad un magnete SmCo5 (Mr = 0, 9T ), un magnete Nd-Fe-B (Mr = 1.3T ), la torsione
risul-ta pi`u che raddoppiata. Tutti questi dispositivi necessitano di magneti ad elevata magnetizzazione, inoltre, utilizzando spesso magneti in repulsione, `e necessario che la magnetizzazione resti costante il pi`u possibile, anche in presenza di elevati campi smagnetizzanti, cio`e devono possedere una elevata forza coercitiva.In definitiva, i magneti in terre rare sono i pi`u adatti alle
Figura 1.28: Varie geometrie di magneti permanenti al neodimio
Figura 1.30: Cuscinetto radiale a magnetizzazione assiale (a) e cuscinetto assiale a magnetizzazione assiale (b)
applicazioni magnetomeccaniche. I principali tipi di cuscinetti sono:
• Cuscinetti rotanti
Il cuscinetto radiale pi`u semplice `e costituito da due magneti ad anello concentrici in repulsione (in figura 1.30 (a) la magnetizzazione `e assiale ma il sistema di forze e rigidezze `e del tutto equivalente a quello che si avrebbe con una magnetizzazione radiale).
In posizione centrale, il sistema non sviluppa nessuna forza. Se uno dei due anelli si porta in posizione eccentrica, si genera una forza radiale che tende a riportare l’anello nella posizione centrale, cio`e il sistema `e stabile in senso radiale. Il sistema risulta, invece, instabile assialmente e angolarmente, ovvero si generano forze destabilizzanti (di repulsione) tra gli anelli, se questi non giacciono perfettamente sullo stesso piano. Analogamente al cuscinetto radiale, esiste quello magnetico assiale pas-sivo che, viceversa, `e instabile radialmente (figura 1.30 (b)). Allo stu-dio di quest’ultimo sono dedicati il 2◦ e 3◦capitolo (relativamente alla
condizione in cui l’anello superiore `e in rotazione).
Questi cuscinetti sono molto semplici ed economici, non necessitano di una sorgente di potenza, sono estremamente affidabili, durano molto a lungo e possono essere utilizzati in combinazione con cuscinetti mec-canici (sospensione ibrida) oppure in combinazione con cuscinetti
ma-Figura 1.31: Cuscinetti radiali
Figura 1.32: Configurazione elementare di un cuscinetto magnetico lineare
gnetici attivi per sospensioni completamente magnetiche.
In figura 1.31 sono rappresentate due configurazioni elementari di cu-scinetto radiale, il primo `e magnetizzato assialmente, il secondo ra-dialmente. Si pu`o dimostrare che forze e rigidezze sono identiche per i due sistemi ma dato che `e pi`u semplice produrre anelli magnetizzati assialmente (costi ridotti), il sistema 1 `e da preferire a 2.
• Cuscinetti lineari
Esiste anche un altro tipo di cuscinetto passivo, anche se meno utiliz-zato, che assicura la sospensione o la levitazione su una grande guida lineare (figura 1.32).
L’esempio pi`u noto `e il treno a levitazione magnetica: il moto lungo i binari `e controllato da un motore lineare e la posizione stabile `e mantenuta da una sospensione magnetica che controlla cinque gradi di libert`a. L’utilizzo di cuscinetti magnetici lineari a magneti permanenti
`e limitato ad applicazioni speciali quali per esempio i treni a levitazione magnetica.
1.7
Modellizzazione dei magneti permanenti
1.7.1 Introduzione
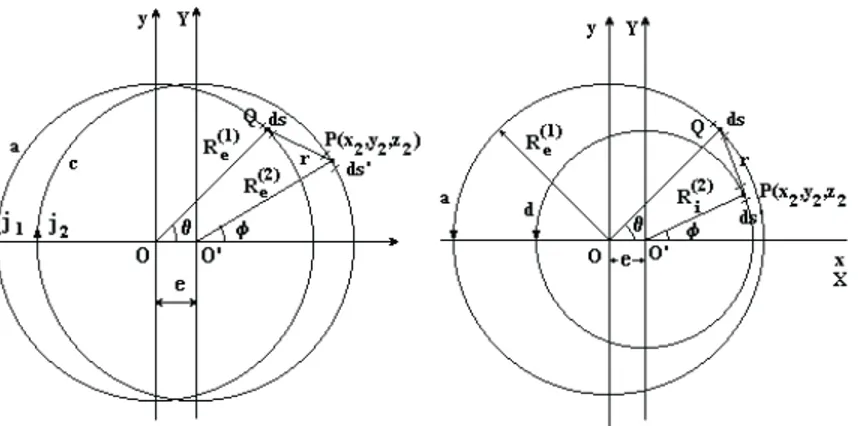
In questo paragrafo si espone un metodo analitico per calcolare la forza di repulsione tra due anelli magnetici,costituenti il cuscinetto.
1.7.2 Schematizzazione dei cuscinetti magnetici passivi ad anello
Ci sono due comuni tecniche per modellare i magneti permanenti. La prima metodologia usa il concetto di poli magnetici, o anche di cariche magnetiche, in cui la densit`a volumetrica dei poli `e data dalla divergen-za della induzione magnetica intrinseca ~Bi o dell’intensit`a di
magne-tizzazione ~M . L’intensit`a del campo magnetico ~H deriva dalla densit`a
dei poli magnetici utilizzando una versione magnetostatica della legge di Coulomb.
Il metodo qui proposto,denominato metodo delle correnti superficali usa il vettore operazione di rotore, considerando che ∇ × ~M produce
la stessa induzione magnetica ~B di una equivalente densit`a di corrente
elettrica ~J. Si ipotizza una magnetizzazione uniforme (unidirezionalit`a
dei domini magnetici) e costante in tutto il magnete permanente cilin-drico. La conseguenza di tale ipotesi di lavoro `e che tutte le derivate spaziali sono uguali a zero all’interno del campione e quindi,sia le dis-tribuzioni dei poli magnetici che quella delle correnti di Amp´ere risul-tano confinate sulla superficie del cilindro.
Come si vedr`a di seguito, questa ipotesi di uniformit`a `e ragionevol-mente vera per i magneti permanenti a base di terre rare. Una certa disuniformit`a, tuttavia, viene parzialmente introdotta durante il pro-cesso di compattazione e sinterizzazione delle polveri delle leghe di cui i magneti permanenti sono costituiti. Di conseguenza, questa dis-uniformit`a dipende anche dalle dimensioni dei magneti. Secondo le indicazioni dei costruttori di magneti permanenti, comunque, questa disuniformit`a attraverso il volume del magnete non supera il 5%.
1.7.3 Metodo delle correnti superficiali
Alla base del metodo delle correnti superficiali o metodo delle correnti di Amp´ere, c’`e l’equazione che lega il campo magnetico con l’induzione magnetica (1.9) che riarrangiata `e:
∇ × ~H = ∇ × (( ~B/µo) − ~M )) (1.12)
Sostituendo l’equazione (1.9) nella relazione di Maxwell (1.8) per il caso statico, si ottiene:
∇ × ~B = µo( ~Jcond+ ∇ × ~M ) = µo( ~Jcond+ ~Jm) (1.13)
indicando con ~Jconde ~Jmrispettivamente le correnti di conduzione e di
magnetizzazione.
Come gi`a esposto nel paragrafo precedente, nel caso di magneti per-manenti la corrente di Amp´ere `e una equivalente densit`a di corrente definita come:
~
Jm = ∇ × ~M (1.14)
Il metodo delle correnti di Amp´ere, quindi, utilizza una distribuzione di corrente ~Jm per calcolare l’induzione magnetica ~B.
Il vettore ~Jm, densit`a di corrente di magnetizzazione, caratterizza
quelle correnti atomiche che nascono all’interno del materiale a causa del moto degli elettroni atomici lungo le loro orbite. Nel caso di un magnete cilindrico di materiale omogeneo, con asse parallelo al campo magnetico e uniformemente magnetizzato, si generano delle corren-ti atomiche sia interne che esterne al magnete e si svolgono in piani perpendicolari all’asse. Tuttavia, da un punto di vista macroscopico, come si vede dalla figura 1.33, all’interno del cilindro non si ha alcu-na corrente. Infatti ualcu-na qualsiasi superficie interalcu-na al cilindro risulta attraversata in un verso da tante correnti atomiche quante nel verso opposto.
Sulla superficie laterale del cilindro la situazione `e diversa in quanto le correnti atomiche adiacenti alla superficie contribuiscono a generare una corrente superficiale che `e data da:
~
Js= ~M × ~n (1.15)
Nel caso di materiali non uniformemente magnetizzati, le correnti atomiche che attraversano una generica superficie interna non si com-pensano esattamente tra loro e si ha anche una corrente di magnetiz-zazione con densit`a volumetrica data dall’equazione (1.14).
Figura 1.33: Cilindro di sostanza magnetizzata uniformemente
La conoscenza dell’intensit`a di magnetizzazione ~M equivale quindi alla
conoscenza di ~Js e ~Jm, e viceversa.
In un materiale magnetizzato, quindi, tutte le correnti contribuiscono al campo magnetico risultante. Il contributo ~Bm all’induzione
magne-tica in un punto P dello spazio, pu`o calcolarsi per mezzo della prima legge di Laplace: ~ Bm= µo 4π · Z V ~ Jm× ~r r3 dV + µo 4π · Z S ~ Jms× ~r r3 dS (1.16)
dove r rappresenta la distanza dal punto P del generico elemento infinitesimo dV o dS.
1.7.4 Calcolo delle forze tra una coppia di magneti La levitazione magnetica implica necessariamente l’esistenza di forze magnetiche sul corpo che equilibrano, in generale, la forza gravitazionale. Quindi l’obiettivo degli studi sulla levitazione `e calcolare tali forze. Con il metodo delle correnti superficiali il calcolo delle forze si basa principalmente sull’applicazione della prima e seconda legge di Laplace. In generale con l’applicazione di queste leggi a due circuiti percorsi da corrente, `e possibile predire la forza che gli stessi si scambiano recipro-camente. Siano C1 e C2 due circuiti (figura 1.34) percorsi da correnti
di intensit`a I1e I2 rispettivamente. Per la prima legge di Laplace,
l’in-duzione magnetica ~B1, generata nel generico punto P dalla corrente
che circola nel primo circuito, `e data da:
~ B1= 4πµoI1 I C1 ~ ds1× ~r r3 (1.17)
Figura 1.34: Schema e rappresentazione per il calcolo delle forze tra due circuiti
La forza agente sopra di esso si ricava dalla seconda legge di Laplace:
~ dF2 = I2ds~2× ~B1 = µ4πoI1I2 I C1 ~ ds2× ( ~ds1× ~r12) r3 12 (1.18)
La forza risultante sopra il circuito C2 `e:
~ F2= µo 4πI1I2 I C1 I C2 ~ ds2× ( ~ds1× ~r12) r3 12 (1.19)
dove ~ds1 e ~ds2 sono vettori elementari lungo la direzione delle correnti
I1 e I2, mentre ~r12`e il vettore posizione tra ~ds1 e ~ds2.
Nel caso di mezzi materiali omogenei e isotropi, nel nostro caso ma-gneti permanenti, la permeabilit`a mama-gnetica del vuoto µo deve essere
sostituita dalla permeabilit`a del mezzo materiale µ.
Per il principio di azione e reazione la forza ~F1 agente sopra il circuito
C1 `e opposta a ~F2.
Nel caso di due circuiti complanari, paralleli, con raggio uguale e dis-tanza h, tra i piani, piccola rispetto al raggio R dei circuiti (figu-ra 1.35), la forza totale si calcola con buona approssimazione con la relazione valida per due fili rettilinei:
Figura 1.35: Rappresentazione per il calcolo delle forze tra due circuiti uguali e paralleli
Il metodo proposto si basa sull’ipotesi che i magneti permanenti si pos-sono modellare, ai fini degli effetti magnetici, con il modello delle den-sit`a di correnti superficiali.Come gi`a affermato, per i magneti perma-nenti la conoscenza della magnetizzazione ~M equivale alla conoscenza
di tutte le propriet`a magnetiche del mezzo, degli effetti magnetici da esso risentiti e anche di quelli provocati. Ai fini degli effetti magnetici causati dalla magnetizzazione del magnete, la conoscenza della ma-gnetizzazione equivale alla conoscenza di un’opportuna distribuzione di correnti superficiali (appunto quelle di magnetizzazione), e vicev-ersa.Le ipotesi per applicare il metodo delle correnti superficiali per predirre le forze tra due anelli magnetici sono le seguenti:
– gli assi magnetici dei vari domini magnetici devono essere perfet-tamente allineati con l’asse di simmetria del magnete (magnetiz-zazione uniforme e costante);
– la permeabilit`a relativa µr, del materiale costituente i magneti,
deve essere unitaria;
– lo spostamento relativo dei magneti deve essere piccolo in re-lazione al raggio medio degli anelli.
Le prime due ipotesi sono verificate con buona approssimazione quan-do la forza coercitiva coercitivo Hc uguaglia l’induzione magnetica
residua Br del materiale magnetico. Queste condizioni si realizzano,
come si nota dalla figura 1.36 e dalle curve di smagnetizzazione dei vari materiali per la famiglia dei materiali terre rare (RE-Co e Nd-Fe-Bo). Di conseguenza, per anelli fabbricati con tali materiali magnetici, la magnetizzazione si pu`o ritenere uniforme nella direzione di
magnetiz-Figura 1.36: Curva ideale di smagnetizzazione dei magneti permanenti
zazione (assiale o radiale) e costante in tutto il volume ( ~M = cost).
Nell’ipotesi di utilizzo di magneti permanenti ad elevato potere co-ercitivo, l’intensit`a di magnetizzazione ~M pu`o essere descritta dalla
relazione:
~
M = ~Mo+ χmH~ (1.21)
dove: ~Mo `e la densit`a di magnetizzazione residua intrinseca del
mate-riale e χm `e la suscettivit`a magnetica.
Considerando le equazioni (1.9) e (1.21), si pu`o scrivere:
~
B = µo(µrH + ~~ Mo) (1.22)
considerato che µr = 1 + χm `e la permeabilit`a magnetica relativa del
materiale.
Per un magnete permanente ideale la suscettivit`a magnetica `e nulla (χm = 0), mentre `e unitaria la sua permeabilit`a magnetica relativa
(µr= 1). Di conseguenza l’equazione (1.21) si riduce a:
~
M = ~Mo (1.23)
Nel caso di magneti permanenti reali a base di terre rare la suscettivit`a si pu`o considerare quasi nulla (χm ≈ 0), per cui la permeabilit`a
ma-gnetica relativa diventa unitaria (µr ≈ 1). Anche per questi magneti
permanenti, quindi, la curva di smagnetizzazione B - H si pu`o ipotiz-zare lineare. Di conseguenza i magneti a base di terre rare si possono considerare dei magneti ideali, e quindi risulta che:
Figura 1.37: Coppia di magneti ad anello in repulsione
Figura 1.38: Rappresentazione delle correnti superficiali equivalenti per un cuscinetto magnetico con anelli sovrapposti, in repulsione (verso di magnetizzazione opposto)
1.7.5 Calcolo delle forze per cuscinetti assiale a magne-tizzazione assiale
La figura 1.37, mostra due magneti a forma di anello in condizioni di repulsione e leggermente eccentrici uno rispetto all’altro. In con-seguenza delle ipotesi di magnetizzazione uniforme in tutto il volume, i magneti generano solamente correnti superficiali, dal momento che quelle volumetriche sono nulle. Nella figura 1.38 `e mostrato il caso di anelli sovrapposti in condizioni di repulsione. Sono rappresentate le distribuzioni superficiali di corrente con il loro verso di percorrenza, per il magnete inferiore (1) e per quello superiore (2). Nella stessa figura `e riportato il vettore ~M di magnetizzazione. Per gli anelli in repulsione
la direzione di magnetizzazione degli anelli `e la stessa, mentre risulta opposto il verso.Nel caso degli anelli, le correnti sono distribuite oltre


![Figura 3.13: Carichi radiali per il cuscinetto MPN 15-45 (e = 0, gap = 0.1mm, 500giri/min) 0 0.5 1 1.5 2 2.5 3 3.5 4050010001500 tempo [s]Carico assiale [N] MPN15−45,1500giri/min,gap=0.1mm,e=0](https://thumb-eu.123doks.com/thumbv2/123dokorg/5695637.73030/77.918.273.645.202.509/figura-carichi-radiali-cuscinetto-giri-tempo-carico-assiale.webp)
![Figura 3.15: Carichi radiali per il cuscinetto MPN 15-45 (e = 0, gap = 0.1mm, 1500giri/min) 0 0.5 1 1.5 2 2.5 3 3.5 4050010001500 tempo [s]Carico assiale [N] MPN15−45,3000giri/min,gap=0.1mm,e=0](https://thumb-eu.123doks.com/thumbv2/123dokorg/5695637.73030/78.918.270.640.202.494/figura-carichi-radiali-cuscinetto-giri-tempo-carico-assiale.webp)
![Figura 3.17: Carichi radiali per il cuscinetto MPN 15-45 (e = 0, gap = 0.1mm, 3000giri/min) 0 0.5 1 1.5 2 2.5 3 3.5 4020040060080010001200 tempo [s]Carico assiale [N] MPN15−45,500giri/min,gap=2mm,e=0](https://thumb-eu.123doks.com/thumbv2/123dokorg/5695637.73030/79.918.270.645.203.515/figura-carichi-radiali-cuscinetto-giri-tempo-carico-assiale.webp)
![Figura 3.19: Carico assiale per il cuscinetto MPN 15-45 (e = 0, gap = 2mm, 1500giri/min) 0 0.5 1 1.5 2 2.5 3 3.5 4020040060080010001200 tempo [s]Carico assiale [N] MPN15−45,3000giri/min,gap=2mm,e=0](https://thumb-eu.123doks.com/thumbv2/123dokorg/5695637.73030/80.918.269.648.203.508/figura-carico-assiale-cuscinetto-giri-tempo-carico-assiale.webp)
![Figura 3.28: Spettro di ampiezza del carico assiale del cuscinetto MPN 15-45(gap = 0.1mm,1500 giri/min) 0 50 100 150 200 2500510152025303540 frequenza [Hz]Ampiezza [N] MPN15−45,3000giri/min,gap=0.1mm,e=0](https://thumb-eu.123doks.com/thumbv2/123dokorg/5695637.73030/85.918.273.642.201.513/figura-spettro-ampiezza-carico-assiale-cuscinetto-frequenza-ampiezza.webp)
