Capitolo 1. Funzionamento degli elicotteri UAV
1.1 Introduzione
Inizialmente sviluppati per scopi prettamente militari, gli UAV si stanno sempre più diffondendo anche in campo civile grazie alla versatilità del loro impiego.
I velivoli UAV possono essere completamente automatizzati, cioè seguire un profilo di volo pre-programmato, o essere telecomandati a distanza da una stazione fissa o mobile. Le principali applicazioni di un UAV possono essere raggruppate in sei categorie:
• Rilevamento a distanza: viene effettuato tramite sensori montati a bordo del velivolo che possono essere ad esempio telecamere, infrarossi, sensori biologici e chimici.
• Trasporto
• Ricerca scientifica: tramite UAV è possibile accedere e ricavare dati per ricerche scientifiche in ambienti troppo pericolosi per gli operatori umani, ad esempio è possibile ricavare dati real-time sul comportamento degli uragani o sui fenomeni di tipo vulcanico.
• Attacco: gli UAV da combattimento (UCAV, Unmanned Combat Aerial Vehicle) possono essere equipaggiati con diversi tipi di armamento ed essere utilizzati in scenari bellici.
• Salvataggio: tramite i sensori di bordo è possibile effettuare ricerche di superstiti e dispersi in particolari scenari inaccessibili o troppo pericolosi.
• Impieghi nella Protezione Civile: ad esempio in aree soggette a disastri ambientali (terremoti, frane, inondazioni, ecc...).
Esistono svariati tipi di UAV che si differenziano per l'architettura di base, dimensioni, prestazioni, autonomia (Fig. 1.1).
Come già detto, anche per gli UAV vi sono velivoli ad ala fissa e velivoli ad ala rotante. I velivoli ad ala fissa sono stati inizialmente scelti come piattaforma per lo sviluppo di UAV per molteplici ragioni: hanno una struttura semplice, efficiente e facile da realizzare. Il progetto dei sistemi automatici di controllo, come ad esempio i sistemi autopilota, risulta inoltre più semplice per i velivoli ad ala fissa rispetto a quelli ad ala rotante. Ciò è dovuto alla relativa semplicità ed alla simmetria di tale architettura, che permette notevoli semplificazioni nello studio della dinamica.
I velivoli UAV ad ala rotante (RUAV, Rotary Unmanned Aerial Vehicle), a dispetto di una maggiore complessità, possiedono alcune caratteristiche che non possono essere riprodotte dai velivoli ad ala fissa.
Figura 1.1 : UAV dimostrativi al “Naval Unmanned Aerial Vehicle Air Demo” ospitato al Webster Field Annex of Naval Air Station Patuxent River. Da sinistra a destra vi sono: RQ-11A Raven, Evolution, Dragon Eye, NASA FLIC, Arcturus T-15, Skylark, Tern, RQ-2B Pioneer, and Neptune.
tipi di missione anche in scenari molto particolari.
In breve, i principali vantaggi e svantaggi di un elicottero UAV sono:
Vantaggi:
• Ridotto spazio necessario per il lancio e per il recupero del RUAV. • Capacità VTOL.
• Possibilità di operare sia in condizioni di crociera sia in condizioni di hovering
Svantaggi:
• Struttura meccanica molto complessa.
• Velocità massima e autonomia di missione minori di un UAV ad ala fissa. • Dinamica instabile e difficoltà nel progetto del sistema di controllo.
1.2 Funzionamento dei velivoli ad ala rotante
Un velivolo ad ala rotante è definito come un velivolo in cui la forza di portanza necessaria ad equilibrare l'azione del peso è generata da una serie di elementi, dette pale, poste in rotazione attorno ad un asse1. L'insieme delle pale in rotazione è chiamato
anche rotore.
Un elicottero è quindi un velivolo ad ala rotante, in cui il rotore è posto in rotazione tramite la potenza fornitagli da un motore.
Le pale del rotore principale sono delle superfici portanti con un elevato allungamento alare, investite da un flusso d'aria ad alta velocità dovuto appunto alla rotazione delle pale stesse.
Le pale sono inoltre dotate di un meccanismo che consente di variarne l'angolo di assetto, controllando in tal modo le corrispondenti forze aerodinamiche generate [1] [3].
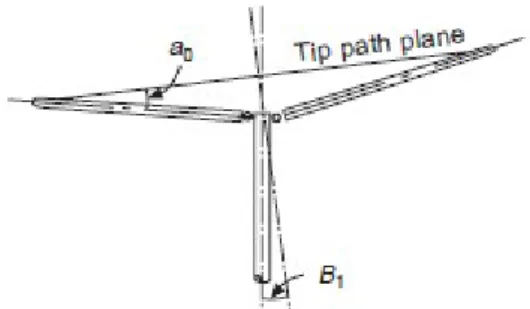
Nello studio della dinamica degli elicotteri viene spesso definito un particolare piano di rotazione del rotore, chiamato Tip Path Plane (TPP). Il TPP è infatti il piano contenente il disco immaginario individuato dalle punte delle pale del rotore principale durante la loro rotazione, chiamato anche disco del rotore (Fig. 1.2).
Figura 1.2: Rappresentazione del Tip Path Plane, si notano l'angolo di coning a0 e
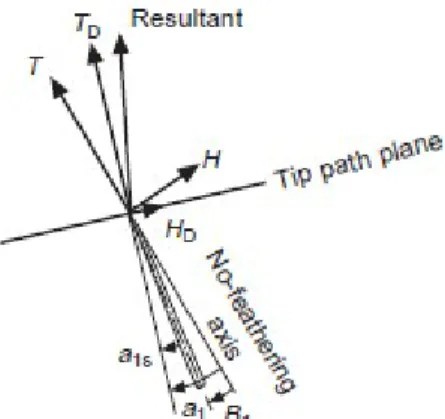
L'insieme di tutte le forze aerodinamiche generate da ogni pala durante la propria rotazione può essere quindi ridotto ad una forza risultante, che può essere scomposta nelle due componenti perpendicolare e parallela al TPP. La componente perpendicolare è detta spinta, e viene generalmente indicata con il simbolo TD, mentre la componente
parallela è definita come forza HD (Fig. 1.3)2.
Effettuando un confronto tra velivoli ad ala fissa e ad ala rotante, si nota come, se si trascura la forza H presente in un elicottero, in entrambi i casi i velivoli sono sottoposti sostanzialmente a quattro forze: peso, resistenza, portanza e spinta.
In un aereo la portanza è generata dalle ali e la spinta dall'azione dei motori. Differentemente, in un elicottero la funzione del motore è quella di mantenere in rotazione il rotore principale, quindi sia la portanza che la spinta sono dovute al rotore principale.
In particolare, indicando con TD la componente perpendicolare al TPP, la portanza
2 Oltre al TPP, viene spesso utilizzato come riferimento un altro piano detto piano di No-feathering. Per definizione rispetto a tale piano non si ha variazione del passo collettivo, e l'incidenza delle pale è pari al valore costante definito dal passo collettivo.
Figura 1.3: Scomposizione della risultante delle forze generate dal rotore. TD e HD sono le componenti della
risultante rispetto al TPP, mentre T ed H sono le risultanti rispetto al piano di No-feathering [1].
corrisponde alla componente di TD parallela alla forza peso, mentre la spinta è la
componente di TD diretta secondo la direzione del moto dell'elicottero [3].
In condizione di volo avanzante, il TPP è inclinato in avanti, di conseguenza è ruotato in avanti anche il vettore della risultante delle forze del rotore principale (Fig. 1.4). In condizione di volo avanzante livellato stazionario, la spinta eguaglia la resistenza, mentre la portanza annulla l'azione del peso e quindi l'elicottero procede a velocità costante.
Se la portanza è maggiore del peso, l'elicottero sale di quota, in caso contrario l'elicottero perde quota.
Se la spinta è maggiore della resistenza, la velocità di volo aumenta, in caso contrario la velocità di volo diminuisce.
In condizione di volo laterale, il TPP è inclinato lateralmente, in questo caso, la portanza e il peso sono sempre diretti verticalmente, mentre la spinta è diretta lateralmente, nel verso del moto, e la resistenza nel verso opposto.
Il caso di volo retrocedente è analogo al caso di volo avanzante con la differenza che il TPP è inclinato all'indietro e quindi spinta e resistenza hanno segno invertito rispetto al caso precedente [3].
Vi sono poi due condizioni di volo specifiche per gli elicotteri: hovering e volo verticale.
In condizione di volo verticale, sia la portanza che la spinta sono dirette verso l'alto mentre peso e resistenza verso il basso. Come si nota in Fig 1.5, se la somma di portanza e spinta è maggiore delle somma di peso e resistenza, l'elicottero sale in
Figura 1.4: Forze agenti sull'elicottero in condizioni di volo avanzante, laterale e retrocedente [3].
direzione verticale, viceversa l'elicottero scende verticalmente.
In condizione hovering, la configurazione delle forze è analoga al caso di volo verticale, con la particolarità che, essendo l'elicottero fermo, sia la spinta che la resistenza aerodinamica sono nulle [3].
Figura 1.5: Forze agenti sull'elicottero in condizione di volo verticale e hovering [3].
Le pale del rotore principale sono in rotazione in un verso, ad esempio antiorario, in conseguenza di ciò la fusoliera dell'elicottero tende a ruotare in senso orario. Tale tendenza della fusoliera a ruotare è detta torsione.
La torsione della fusoliera è una diretta conseguenza della potenza fornita dal motore al rotore principale, e ad ogni cambiamento di tale potenza corrisponde un cambiamento negli effetti di torsione. Maggiore è la potenza fornita, e maggiore è la coppia di torsione agente sulla fusoliera.
Al contrario, se si considera la manovra di autorotazione3, tale manovra viene effettuata
a motore spento, quindi il motore non fornisce potenza al rotore e di conseguenza non vi è coppia di torsione.
Per contrastare la coppia di torsione, ed evitare che la fusoliera ruoti su se stessa, viene utilizzato in genere un rotore ausiliario situato all'estremità della trave di coda.
Il rotore ausiliario, chiamato anche rotore di coda o rotore antitorsione, produce una forza perpendicolare a se stesso in grado di generare una coppia rispetto al baricentro che compensa la coppia di torsione del rotore principale (Fig. 1.6).
I pedali nel cockpit consentono al pilota di aumentare o diminuire la spinta del rotore di coda per neutralizzare gli effetti della torsione o per effettuare una rotazione della fusoliera.
3 Durante l'autorotazione, viene disattivato il collegamento tra il rotore principale e il motore, che non fornisce più al rotore l'energia necessaria per girare. L'energia viene invece generata dal passaggio dell'aria attraverso le pale durante la discesa e dalla forza d'inerzia del rotore principale.
Nel campo dello studio della meccanica del volo degli elicotteri, può risultare molto utile individuare la posizione che occupa una pala durante la rotazione mediante l'utilizzo dell'angolo di azimuth Ψ.
L'angolo di azimuth è definito come l'angolo compreso tra l'asse longitudinale di una pala e l'asse di simmetria longitudinale della fusoliera dell'elicottero, ed è definito positivo nel verso di rotazione delle pale (Fig. 1.7).
Figura 1.6: Funzionamento del rotore di coda [3].
Per come è definito l'angolo Ψ, è possibile classificare le pale in due categorie, in base alla posizione occupata dalla pala stessa e alla direzione del moto: una pala che occupa una posizione compresa tra Ψ=0° e Ψ=180° è definita avanzante, se invece occupa una posizione compresa tra Ψ=180° e Ψ=0° allora è detta retrocedente.
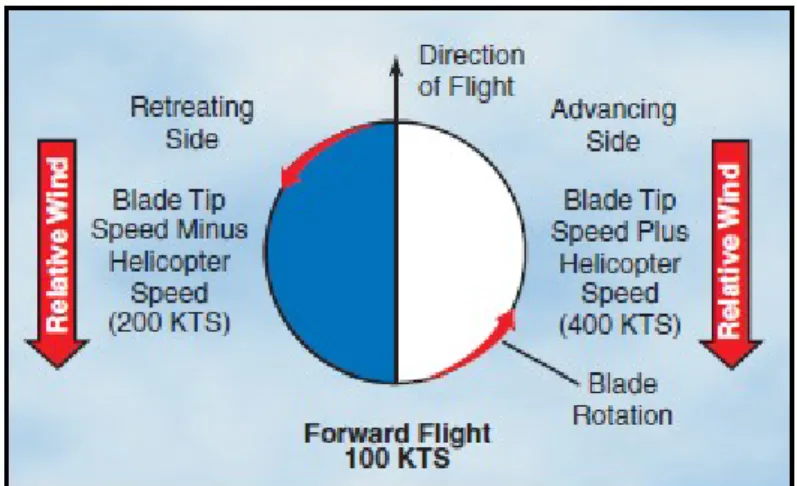
In condizione di volo traslato, la velocità locale del flusso di aria che investe la pala è data dalla somma vettoriale della velocità della pala stessa, dovuta alla rotazione, e della velocità di avanzamento dell'elicottero, di conseguenza le pale avanzanti vedranno la loro velocità incrementata, mentre le pale retrocedenti la vedranno diminuita (Fig. 1.8), inoltre vi potrà essere una zona vicina al rotore in cui il flusso risulta invertito (Fig 1.9).
Figura 1.8: La velocità delle punte delle pale è di circa 300 nodi. Se l'elicottero sta avanzando ad una velocità di circa 100 nodi, la velocità relativa del vento nel lato avanzante sarà di circa 400 nodi, mentre nel lato retrocedente tale velocità sarà di circa 200 nodi. Tale asimmetria della velocità si traduce in una asimmetria della distribuzione di portanza [3].
Considerando il caso in cui tutte le pale siano posizionate al solito angolo di assetto, una distribuzione non simmetrica della velocità causa una distribuzione non simmetrica della portanza, in particolare la portanza risulterà essere maggiore sulle pale avanzanti che non su quelle retrocedenti (Fig. 1.10). Tale distribuzione asimmetrica di portanza è causa di una coppia di rotazione attorno all'asse di rollio dell'elicottero. Per poter eliminare il momento di rollio, causato dalla distribuzione asimmetrica di portanza, le pale vengono collegate al rotore principale tramite cerniere che consentono alle pale stesse il caratteristico movimento chiamato flappeggio.
Con il termine flappeggio si indica l'oscillazione della pala attorno all'asse di flappeggio, indicato in Fig 1.114. Le pale in rotazione sono sottoposte sia ad una
distribuzione di portanza che alle forze inerziali, per tale motivo non rimarranno perfettamente orizzontali, ma ruoteranno attorno alla cerniera di flappeggio in modo da equilibrare queste due forze.
Figura 1.9: Regione di flusso invertito nel lato retrocedente [1].
Figura 1.10: Distribuzione della portanza sul disco del rotore: nel caso (a) le pale del rotore non possono flappeggiare (rotore rigido), mentre nel caso (b) è consentito il flappeggio delle pale [16].
Se l'elicottero è in volo in condizioni di hovering, durante la rotazione ogni pala sarà investita da un flusso che avrà sempre la solita velocità, quindi si avrà una distribuzione di portanza costante.
Di conseguenza le pale ruoteranno di un angolo a0, fino a quando le forze di natura
inerziale non saranno in grado di equilibrare le forze aerodinamiche. Tale fenomeno è detto anche coning e l'angolo a0 prende il nome di angolo di coning.
Se l'elicottero è invece in volo orizzontale, oltre alla rotazione dovuta al coning, vi sarà una variazione dell'angolo di flappeggio dovuta alla distribuzione asimmetrica della portanza, che sarà quindi funzione della posizione occupata dalla pale durante la rotazione.
L'espressione dell'angolo di flappeggio β in funzione dell'angolo di azimuth Ψ può essere rappresentata come serie di Fourier, in cui è possibile trascurare i termini di ordine superiore al primo [9]:
=a0a1cosb1sin (1.1)
Figura 1.11: Tipico collegamento pala-rotore: si possono riconoscere la cerniera di flappeggio (Flapping Hinge), la cerniera di variazione del passo (Feathering Hinge) e la cerniera di brandeggio (Lagging Hinge), [1].
Il flappeggio delle pale, e quindi l'inclinazione del disco del rotore, può essere governata dal pilota imponendo delle variazioni dell'angolo di assetto delle pale tramite i comandi di passo collettivo e passo ciclico.
Il comando di passo collettivo consente al pilota, o al sistema automatico di controllo, di poter aumentare o diminuire l'angolo di assetto delle pale in modo costante rispetto all'angolo Ψ, aumentando o diminuendo di conseguenza la spinta totale fornita dal rotore.
Il comando di passo ciclico consente invece di ottenere una variazione dell'angolo di assetto delle pale che sia funzione dell'angolo Ψ, tale comando permette sostanzialmente di governare l'inclinazione della spinta del rotore rispetto all'asse del rotore.
Analogamente a quanto fatto per l'angolo di flappeggio β, anche l'angolo di assetto delle pale θ può essere espresso come serie di Fourier:
=0LonsinLatcos (1.2)
dove con θ0 viene indicato il passo collettivo, e con θLon e θLat rispettivamente il passo
ciclico longitudinale e laterale.
Il rotore principale di un elicottero, data la elevata velocità di rotazione, si comporta come un giroscopio in cui l'angolo di flappeggio delle pale β è in ritardo di 90° rispetto all'angolo di assetto delle pale θ, tale fenomeno è conosciuto con il nome di precessione giroscopica.
Si ponga quindi la necessità di voler inclinare in avanti il disco del rotore di un certo angolo a1 nel piano longitudinale, per fare ciò il pilota dovrà agire sul passo delle pale
con un comando di passo ciclico longitudinale:
=−Lonsin (1.3)
Infatti, nella posizione Ψ=90°, la variazione di angolo di assetto rispetto alla condizione iniziale è massima e pari a -θLon, per effetto di tale variazione vi sarà una riduzione della
portanza e quindi la pala tenderà a flappeggiare verso il basso per compensare tale diminuzione. Il contrario avviene nella posizione Ψ=270°, in cui si ha un incremento positivo +θLon del passo delle pale e quindi un aumento della portanza che sarà
compensato dalle pale flappeggiando verso l'alto.
Come conseguenza della precessione giroscopica, l'angolo di flappeggio delle pale sarà minimo in Ψ=180° e invece massimo in Ψ=360°, comportando quindi un'inclinazione in avanti del disco del rotore. Il comportamento rispetto al piano laterale è perfettamente analogo.
In Fig. 1.13 è riportato un dettaglio della coda di un elicottero, in cui si possono notare le superfici di coda orizzontale e verticale. Analogamente a quanto avviene in un velivolo ad ala fissa, gli impennaggi di coda di un elicottero hanno una funzione stabilizzante. Se la velocità dell'elicottero è abbastanza elevata, le forze aerodinamiche
Figura 1.12: Effetti della precessione giroscopica: la rotazione del disco del rotore avviene con un ritardo di circa 90° rispetto alle variazioni di angolo di passo delle pale [3].
Figura 1.13: Piani di coda dell'elicottero radiocomandato Raptor .90 [16]
1.3 Differenze tra elicotteri full-scale e modelli in scala
Un modello in scala di un elicottero è essenzialmente l'equivalente di un elicottero a grandezza naturale (full-scale) miniaturizzato, con però un certo numero di differenze. La differenza principale nel collegamento tra le pale e l'asse di rotazione del rotore principale. I modelli in scala presentano infatti un rotore di tipo rigido, non dotato quindi delle cerniere di flappeggio (Fig. 1.14). In questo modo i tempi di risposta vengono diminuiti e viene data al pilota una migliore sensibilità sui comandi. Inoltre un rotore di questo tipo consente di compiere particolari manovre, come ad esempio le fasi di volo rovescio, in maniera più semplice rispetto ad un elicottero RC equipaggiato con un rotore articolato [16] [9].
I modelli di elicotteri in scala hanno in genere una elevata velocità di rotazione del rotore principale intorno ai 1500 rpm e risposte dinamiche molto veloci, dovute alla loro bassa inerzia.
Studi in tal senso ([19],[20]), hanno dimostrato che nei modelli in scala, per poter equilibrare il disco del rotore a seguito di variazioni della portanza, e per poter portare a termine tale operazione in meno di un giro del rotore del rotore, sarebbe necessario un
Figura 1.14: Collegamento pale-rotore dell'elicottero radiocomandato X-Cell 60 SE [16]
Per tale motivo nella maggior parte dei modelli in scala è presente un meccanismo che è in grado di aumentare lo smorzamento delle dinamiche del rotore principale.
Tale meccanismo è chiamato barra stabilizzatrice, o flybar, ed è un derivato dell'analogo sistema che si può trovare a bordo di certi elicotteri convenzionali.
Il sistema di stabilizzazione di tipo Bell, sviluppato attorno agli anni '50, consiste in una barra ai cui estremi sono applicati dei pesi. La barra, grazie ai contrappesi, può essere assimilata ad un giroscopio, quindi ruota secondo una traiettoria relativamente stabile nel piano di rotazione del rotore e, essendo collegata con il rotore stesso, ne aumenta la stabilità.
In seguito il sistema venne modificato, sostituendo ai pesi dei profili alari, in grado quindi di generare delle forze portanti atte a stabilizzare il moto, e prese il nome di sistema Bell-Hiller.
Negli anni '70 il sistema Bell-Hiller cominciò ad essere applicato anche ai modelli in scala, dando ottimi risultati, tanto che allo stato attuale praticamente ogni modello radiocomandato è equipaggiato con tale meccanismo.
Secondo recenti studi ([12],[15]), il sistema di stabilizzazione di tipo Bell-Hiller può essere trattato come un rotore secondario fissato all'albero di rotazione del rotore principale.
In particolare, nei modelli in scala di elicotteri, la flybar è utilizzata con la funzione di attuatore dell'angolo di incidenza delle pale del rotore principale.
Il funzionamento è il seguente: quando il pilota da un comando di passo ciclico, questo viene trasmesso direttamente alla barra stabilizzatrice, inclinando il piano del disco di quest'ultima.
Tramite dei collegamenti meccanici, l'inclinazione della flybar comporta quindi una variazione del passo delle pale.
Applicando il passo ciclico alla barra stabilizzatrice e permettendo a questa di applicare un passo ciclico secondario al rotore principale, il carico sugli attuatori è significativamente ridotto rispetto al caso in cui l'input di passo ciclico è applicato direttamente al rotore principale.
Il comando di passo collettivo invece non comporta alcun cambiamento dell'inclinazione della barra stabilizzatrice.
La funzione stabilizzante del sistema Bell-Hiller è inoltre molto utile per contrastare l'azione dei disturbi aerodinamici.
Se una raffica di vento o un altro tipo di disturbo modificano la condizione di equilibrio dell'elicottero, la barra stabilizzatrice tenderà a mantenere il piano di rotazione parallelo a se stesso.
La fusoliera e il rotore principale invece ruotano rispetto alla flybar in seguito al disturbo, come conseguenza di questo fenomeno vi sarà una variazione dell'angolo formato dal disco del rotore e dalla barra stabilizzatrice.
Il sistema Bell-Hiller eserciterà quindi un'azione sul passo collettivo delle pale del rotore principale tendente a riportare il rotore principale stesso nella condizione iniziale di equilibrio.
Figura 1.15: Funzionamento di una barra stabilizzatrice di tipo Bell-Hiller: la flybar è collegata direttamente alla swashplate tramite un collegamento meccanico (denominato pitch link cyclic command); a seguito di un comando la flybar si inclina e trasmette il comando alle pale del rotore
1.4 Stato dell'arte
Per progettare un sistema di tipo autopilota efficiente per un modello in scala di elicottero, occorre prima comprendere appieno la dinamica del velivolo di base e quindi sviluppare un modello matematico che approssimi in maniera fedele il comportamento fisico del sistema in esame.
La dinamica dell'elicottero è stata oggetto di molti studi sia di tipo teorico che di tipo sperimentale ([1] [5] [6] [7]). I principali problemi nello studio della dinamica degli elicotteri sono dovuti al fatto che tale dinamica è fortemente non-lineare, accoppiata, instabile con input ed output multipli (MIMO, Multiple Input Multiple Output).
Il velivolo è inoltre esposto a disturbi non stazionari, dovuti ad esempio a raffiche di vento, ed agli effetti di interazione tra la scia del rotore principale e gli altri elementi costituenti l'elicottero come la fusoliera o il rotore di coda. Nei suoi studi sulla meccanica del volo e sulla dinamica degli elicotteri, Padfield (1996) ha descritto i differenti gradi di complessità dei modelli sviluppati per lo studio del rotore principale, suddivisi nei tre livelli indicati in Tab. 1.1.
Tabella 1.1: Modelli matematici per lo studio della dinamica degli elicotteri con complessità crescente dal Livello 1 al Livello 3. I modelli del Livello 1 possono essere utilizzati per valutare le prestazioni e le qualità di volo dell'elicottero; i modelli più complessi, ad esempio quelli del Livello 3, consentono la progettazione e lo studio del rotore ed analisi vibrazionali. [2]
Per gli scopi di questa tesi, si è scelto di sviluppare un modello della dinamica sulla base degli studi di Gavrilets e Mettler (2006) [9] [15] relativi agli RUAV.
In tale modello l'elicottero è considerato come un corpo rigido con sei gradi di libertà nello spazio, la dinamica del velivolo può essere studiata risolvendo quindi le classiche equazioni di Newton per un corpo rigido, a cui vanno aggiunte le equazioni che governano la dinamica del rotore principale e della barra stabilizzatrice.
È stato dimostrato che la dinamica del rotore principale e la dinamica della flybar possono essere condensate in un'unica dinamica a due stati, relativa al rotore principale stesso, in cui i due stati sono gli angoli longitudinale e laterale di inclinazione del disco del rotore [9] [15].
Nello sviluppo del modello sono state fatte diverse semplificazioni dovute alle ridotte dimensioni degli elicotteri in scala rispetto agli elicotteri convenzionali, ad esempio sono stati trascurati gli effetti dell'aeroelasticità.
Per quanto riguarda il controllo degli elicotteri, negli ultimi anni sono state effettuate diverse ricerche utilizzando differenti approcci che possono sostanzialmente essere raggruppati nelle seguenti categorie:
• Teoria classica
• Linear Quadratic Regulation • Assegnazione degli autovalori • Teoria del controllo robusto
• Modelli più complessi per la dinamica del rotore
Tutti questi metodi sono stati utilizzati per sviluppare sistemi di controllo per elicotteri in scala ridotta, e presentano diversi gradi di complessità. Allo stato attuale, la teoria
Tale approccio si basa sullo studio di un modello linearizzato della dinamica del RUAV, e sull'implementazione del sistema di controllo mediante controllori semplici di tipo Proporzionale-Integrale-Derivativo (PID).
Vi sono tuttavia due importanti limitazioni riguardanti l'applicazione della teoria classica.
In primo luogo, il modello linearizzato è un'ulteriore approssimazione della dinamica, e non permette di avere tutte le informazioni contenute nel modello non-lineare.
Inoltre, il modello linearizzato può essere applicato fintanto che rimane valida l'ipotesi di “piccole perturbazioni”. Pertanto si possono avere dei risultati soddisfacenti solamente in un intorno del punto di progetto.
Nel caso in esame, si vuole progettare un sistema autopilota che sia in grado di controllare l'elicottero UAV in condizioni di hovering e di volo a bassa velocità. Per tale motivo si è scelto di utilizzare un approccio di tipo classico.
In conclusione, si è visto come il modello della dinamica di un elicottero UAV possa essere ricavato sulla base dei modelli per elicotteri convenzionali, applicando poi le dovute modifiche, relative alle ridotte dimensioni del velivolo in scala ed alla presenza di elementi aggiuntivi come la barra stabilizzatrice.
Il prossimo passo nello sviluppo del sistema autopilota sarà quindi lo studio più nel dettaglio del modello fisico sviluppato per il caso in esame.
Il modello è stato ricavato dagli studi di Mettler (2006) riguardanti la dinamica di elicotteri UAV, si tratta di un modello relativamente semplice ma che è in grado di rappresentare le dinamiche tipiche di un RUAV in un'ampia regione attorno al punto di progetto, ed è stato provato in diversi test di simulazione[15] [16].
![Figura 1.4: Forze agenti sull'elicottero in condizioni di volo avanzante, laterale e retrocedente [3].](https://thumb-eu.123doks.com/thumbv2/123dokorg/7371538.95491/7.892.165.723.153.868/figura-forze-agenti-elicottero-condizioni-avanzante-laterale-retrocedente.webp)
![Figura 1.5: Forze agenti sull'elicottero in condizione di volo verticale e hovering [3].](https://thumb-eu.123doks.com/thumbv2/123dokorg/7371538.95491/8.892.282.611.312.944/figura-forze-agenti-elicottero-condizione-volo-verticale-hovering.webp)
![Figura 1.6: Funzionamento del rotore di coda [3].](https://thumb-eu.123doks.com/thumbv2/123dokorg/7371538.95491/10.892.234.660.155.464/figura-funzionamento-del-rotore-di-coda.webp)
![Figura 1.9: Regione di flusso invertito nel lato retrocedente [1].](https://thumb-eu.123doks.com/thumbv2/123dokorg/7371538.95491/12.892.335.572.182.413/figura-regione-flusso-invertito-lato-retrocedente.webp)
![Figura 1.10: Distribuzione della portanza sul disco del rotore: nel caso (a) le pale del rotore non possono flappeggiare (rotore rigido), mentre nel caso (b) è consentito il flappeggio delle pale [16].](https://thumb-eu.123doks.com/thumbv2/123dokorg/7371538.95491/13.892.204.673.171.468/figura-distribuzione-portanza-rotore-possono-flappeggiare-consentito-flappeggio.webp)
![Figura 1.11: Tipico collegamento pala-rotore: si possono riconoscere la cerniera di flappeggio (Flapping Hinge), la cerniera di variazione del passo (Feathering Hinge) e la cerniera di brandeggio (Lagging Hinge), [1].](https://thumb-eu.123doks.com/thumbv2/123dokorg/7371538.95491/14.892.266.588.166.349/collegamento-riconoscere-flappeggio-flapping-variazione-feathering-cerniera-brandeggio.webp)