5. Controllo dell’attuatore di carico
L’effettuazione di simulazioni Real-Time/Hardware In The Loop del sistema dei comandi di volo di un moderno velivolo Fly-by-wire, prevista nei laboratori DIA, è attuabile solo se si riproducono in simulazione le reali condizioni di funzionamento dell’attuatore velivolo. Per fare ciò è necessario applicare sull’attuatore-velivolo i carichi derivanti dalla generica manovra calcolati in tempo reale dal sistema di simulazione. Tutto questo è realizzato mediante un apposito banco prova, prodotto dall’azienda inglese Dowty.
In questo capitolo viene realizzato un modello lineare del sistema di applicazione del carico, analizzando l’effetto delle logiche di controllo diverse da quella impiegata realmente sul banco e l’influenza della velocità dell’attuatore velivolo sull’andamento del carico applicato.
I test sperimentali per la messa a punto del banco sono stati eseguiti, impiegando esclusivamente un controllore di tipo proporzionale sia sulla retroazione della forza che della velocità dell’attuatore-velivolo, con velocità di quest’ultimo di 20-40-60 mm/sec e con un valore della forza impostata pari a 12 kN.
Le simulazioni sono state eseguite con valori della velocità dell’attuatore-velivolo di 20-40-60 mm/sec e con un valore della forza impostata pari a 12 kN. Il valore del guadagno relativo al controllo sulla retroazione della velocità viene scelto in modo da minimizzare l’errore alla velocità dell’attuatore di 40 mm/sec.
Nella tabella 5.1 sono elencati i parametri relativi ai test sperimentali effettuati sul banco prova alle simulazioni eseguite.
Tabella 5.1: Tabella riassuntiva delle simulazioni e dei test effettuati nel capitolo 5
5.1 Simbologia
A Superficie del pistone del martinetto di carico m massa dello stelo del martinetto di carico m* massa della struttura del banco
c smorzamento del martinetto di carico Simulazioni Simulazione V1 mm/sec Controllore Kp Retroazione velocità Kv Forza Impostata (kN) Kq Fig.
1 0 Proporzionale 7E-7 No 0 20±2.5 costante 5.23 2 40 Proporzionale 7E-7 Si 0 12 costante 5.24 3 40 Proporzionale 7E-7 Si 0.1 12 costante 5.25 4 40 Proporzionale 7E-7 Si 0.15 12 costante 5.26 5 40 Proporzionale 7E-7 Si 0.195 12 costante 5.27 6 20 Proporzionale 7E-7 Si 0.195 12 costante 5.28 7 60 Proporzionale 7E-7 Si 0.195 12 costante 5.29 8 20 Proporzionale 7E-7 Si 0.195 12 Variabile 5.33 9 60 Proporzionale 7E-7 Si 0.195 12 Variabile 5.34 Test Sperimentali test V1 Mm/sec Controllore Retroazione velocità Forza Impostata (kN) Fig. 1 40 Proporzionale Si 12 5.30 2 20 Proporzionale Si 12 5.31 3 60 Proporzionale Si 12 5.32
c* smorzamento della struttura del banco
x1 Spostamento dello stelo dell’attuatore velivolo
x2 Spostamento dello stelo del martinetto di carico
x1* Spostamento della cella di carico
v1 velocità dell’attuatore velivolo
v2 Perturbazione di velocità del martinetto di carico
P0 Presione nella linea di mandata della servovalvola
PS Presione allo scarico
P1 Pressione nella camera 1 del martinetto di carico
P2 Pressione nella camera 1 del martinetto di carico
p Perturbazione di pressione nella singola camera del martinetto Q1 Portata verso la camera 1 del martinetto di carico
Q2 Portata verso la camera 2 del martinetto di carico
q Perturbazione di portata
V1 Volume della camera 1 del martinetto di carico
V2 Volume della camera 2 del martinetto di carico
V0 Volume iniziale delle camere del martinetto di carico
F’ forza agente sullo stelo del martinetto di carico
f’ perturbazione di forza agente sullo stelo del martinetto di carico f perturbazione di forza agente sullo stelo dell’attuatore velivolo β bulk modulus del fluido idraulico
Kq guadagno di portata della servovalvola
Kc guadagno di portata/pressione della servovalvola
i corrente di comando alla servovalvola Klc rigidezza della cella di carico
5.2 Applicazione dei carichi simulati sull’attuatore velivolo
I carichi sull’attuatore velivolo sono applicati per mezzo di un martinetto idraulico servocomandato. Esso è montato in linea con l’attuatore velivolo e sfrutta per il suo funzionamento una apposita linea idraulica separata dalle due destinate all’attuatore.
Per la misura della forza applicata è impiegata una cella di carico modello Sensotec 41-0571-04, posta fra gli steli del martinetto di carico e dell’attuatore velivolo, in grado di rilevare carichi fino a 15000 lb sia in compressione che in trazione.
Lo schema dell’interfaccia banco Dowty/attuatore velivolo è riportato in Fig 5.1.
5.3 Modello linearizzato del loop di carico
5.3.1 Dinamica del martinetto di carico
Il martinetto di carico utilizzato nel banco Dowty per riprodurre i carichi sull’attuatore velivolo è di tipo a singola unità idraulica ed è controllato da una servovalvola proporzionale flapper nozzle a 4 vie.
La dinamica del martinetto viene descritta mediante un modello linearizzato a partire dalle condizioni di pistone posto a mezzeria e carico nullo, con riferimento allo schema riportato in Fig 5.2
I valori delle variabili che definiscono le condizioni iniziali del sistema sono:
= = = = = = + = + = 0 2 1 2 ' 2 1 0 2 0 1 ; 0 ; 0 ; 0 ; 0 ; 2 ; 2 V V V x F Q Q P P P P P P EQ EQ EQ EQ EQ EQ S EQ S EQ
dove P0 è la pressione nella linea di mandata e PS la pressione allo scarico.
Per la modellizzazione è stata fatta l’ipotesi che la geometria del martinetto e della servovalvola sia perfettamente simmetrica. Con questa ipotesi, partendo da una posizione centrata del pistone del martinetto e dello spool della servovalvola, si può assumere che la variazione di pressione in ognuna delle due camere (p) del martinetto sia uguale in modulo e di segno opposto.
P1 , V1 F’ X2 m Camera 1 A A P2 , V2 Camera 2 Q1 Q2
Figura 5.2 Schema del martinetto di carico
Il pistone di massa m è soggetto alla forza esterna F’ , positiva nel verso indicato in Fig 5.2, ed alla differenza tra le pressioni presenti nelle camere 1 e 2, l’equazione del moto risulta pertanto:
(
P p) (
A P p)
A F f' x c x m EQ EQ 2 EQ 1 2 2 + & + − − + = + & & (5.1)e tenuto conto delle condizioni iniziali
' f Ap 2 x c x
m&&2 + &2 − = (5.2)
essendo 2p la perturbazione di pressione totale. Il volume di fluido nelle due camere è:
+ = − = 2 0 2 2 0 1 Ax V V Ax V V (5.3)
L’equazione di continuità della massa per la camera 1 è: p V x A q dt dP V dt dV q & & β β 0 2 1 1 1 + ⇒ ≅ + = (5.4)
avendo trascurato i trafilamenti ed avendo indicato con q la variazione di portata.
Analogamente per la camera 2 si ha:
p V x A q dt dP V dt dV q 2 0 2 2 2 & & ß ß ⇒ ≅ + + = (5.5)
che come si vede è identica alla (5.4).
La variazione di portata q è data dalla seguente:
p K 2 i K q = q − c (5.6)
dove i rappresenta la corrente di comando alla servovalvola mentre Kq e Kc
sono rispettivamente il guadagno di portata ed il guadagno di portata/pressione. I valori dei coefficienti Kq e Kc sono stati ricavati dalla curva che lega la
pressione alla portata per la servovalvola in esame secondo i dati riportati in Appendice 4.
Le tre equazioni differenziali (5.2), (5.5) e (5.6) consentono di ricavare le tre incognite x2, q e p, note la forza f’(t) e la corrente i(t).
Per ricavare le funzioni di trasferimento che legano lo spostamento x2 dello
stelo del martinetto alle variabili f ed i si possono utilizzare la (5.5) e la (5.6) in modo da ottenere un’unica equazione differenziale che contiene le incognite p e x2:
i V K x V A p V K 2 p 0 q 2 0 0 cß + ß = ß + & & (5.7)
Posto x&2 =v2 (dove v2 è la velocità dello stelo) si ottiene, dalle (5.2) e (5.7), il
seguente sistema nello spazio di stato:
+ − − = = + + − = i V K v V A p V K p v x m f p m A v m c v q c 0 2 0 0 2 2 2 2 2 ' 2 β β β & & & (5.8)
Tale sistema può essere espresso in forma matriciale ottenendo:
[ ]
[ ]
⋅ + ⋅ = i ' f B p x v A p x v 2 2 2 2 & & & (5.9)e l’unica uscita del sistema, x2, può essere scritta come:
{ }
[ ]
[ ]
⋅ + ⋅ = i f D p x v C x 2 ' 2 2 (5.10) − − − = 0 c 0 V K 2 0 V A 0 0 1 m A 2 0 m c A ß ß ; = ⋅ 0 q V K 0 0 0 0 m 1 B ß ;
[
0 1 0]
= C ;[
0 0]
= D .Applicando la Trasformata di Laplace alla (5.9) si ottiene:
⋅ β = ⋅ β + β − − + ⋅ i f V K m p x v V K s V A s m A m c s q c ' 0 0 0 0 1 2 0 0 1 2 0 0 2 2 0 0 (5.11)
0 0 0 0 2 2 0 0 1 2 0 2 0 0 0 1 2 1 ' V K s V A s m A m c s V K s V A m A m m c s f x c c β + β − ⋅ − + β + β − ⋅ − + = ; 0 0 0 0 0 2 2 0 0 1 2 0 2 0 0 1 2 0 V K s V A s m A m c s V K s V K V A m A m c s i x c c q β + β − ⋅ − + β + β β − ⋅ − + = da cui si ottiene:
( )
(
)
+ + + + = = c 2 0 0 c 2 0 q 1 2 cK A mV 2 s V K 2 m c s s mV A K 2 s G i x ß ß ß ; (5.12)( )
(
)
+ + + + + = = c 2 0 0 c 2 0 c 2 2 cK A mV 2 s V K 2 m c s s V K 2 s m 1 s G ' f x ß ß ß (5.13)Lo spostamento dello stelo è dato quindi da:
( )
si G( )
s f' Gx2 = 1 + 2 (5.14)
La dinamica linearizzata del martinetto di carico perciò può essere rappresentata dal diagramma riportato in figura 5.3.
x
2i
f ’
G
1(s)
G
2(s)
Figura 5.3 Rappresentazione schematica della dinamica del martinetto di carico
Come si può vedere dallo schema di Fig 5.1 la forza f’, applicata sul martinetto di carico del banco prova Dowty, è trasmessa attraverso un’apposita cella di carico, il cui funzionamento è rappresentabile con una molla di costante elastica Klc. Il valore di Klc è stato ricavato utilizzando i dati presenti in Appendice 4. Il
(
2 1)
' K x x
f =− lc − (5.15)
Con riferimento allo schema di Fig 5.4, si possono dunque ricavare le funzioni di trasferimento di interesse per l’analisi del loop di carico: f’/x1 ed f’/i.
x
2i
G
1(s)
G
2(s)
+
-x
1K
lcf '
f '
Figura 5.4 Rappresentazione schematica del sistema martinetto di carico/cella di carico
Dove x1 è lo spostamento dello stelo dell’attuatore velivolo.
Sostituendo l’espressione di x2 che si ottiene dalla (5.15) nell’equazione (5.14)
si ottiene per f’ l’espressione:
1 2 lc lc 2 lc 1 lc 1 4 3 x 1 ) s ( G K K i 1 ) s ( G K ) s ( G K x ) s ( G i ) s ( G ' f + ⋅ + + ⋅ ⋅ = + = (5.16)
( )
0 lc c lc 0 c 0 2 2 0 c 3 0 lc q 3 mV K K 2 s K V cK 2 V A 2 m 1 s V K 2 m c s mV AK K 2 s G ß ß ß ß ß + + + + + + − = (5.17)( )
(
)
0 lc c lc 0 c 0 2 2 0 c 3 c 2 0 0 c 2 lc 4 mV K K 2 s K V cK 2 V A 2 m 1 s V K 2 m c s cK A mV 2 s V K 2 m c s sK s G ß ß ß ß ß ß + + + + + + + + + + = (5.18)Il sistema dinamico martinetto di carico-cella di carico è rappresentato schematicamente con un unico blocco in Fig 5.5.
f '
i
G
3(s)
G
4(s)
x
1Figura 5.5 Rappresentazione schematica del sistema
Nel modello appena illustrato non si è tenuto conto della dinamica della struttura posta fra martinetto di carico ed attuatore velivolo, mentre questa in generale può avere un ruolo importante. Per descrivere questo effetto si è fatto riferimento allo schema di Fig 5.6, in cui la struttura del banco è rappresentata da una massa m*, una rigidezza K* e da uno smorzamento c*.
(
)
(
)
(
*)
1 2 1 * 1 * 1 * 1 * * 1 * x x k x x k x x c xm && + & − & + − = lc − (5.19)
m
*Stelo martinetto di
carico
Stelo attuatore
velivolo
x
2x
1*x
1Cella di carico
k
*
c
*
Struttura banco
Figura 5.6 Schema della struttura del banco Dowty
Dalla (5.19) si possono ricavare le funzioni di trasferimento che legano lo spostamento x allo spostamento dello stelo del martinetto di carico e a quello 1* dell’attuatore velivolo:
( )
1 s 2 s 1 k k k s G x x * * 2 2 * lc * lc * A 2 * 1 + + + = ? ? ? (5.20)( )
1 s 2 s 1 k k k s 2 s G x x * * 2 2 * lc * * * * * B 1 * 1 + + + + = = ? ? ? ? ? (5.21)con lc k k m + = ω * * 2 * 1 ; lc k k c + = ω ζ * * * * 2 .
Il valore della rigidezza della struttura (k*) è stato assunto di un’ordine di grandezza superiore rispetto alla rigidezza della cella di carico.
Nella Fig 5.7 si può vedere come si modifica lo schema di Fig 5.4:
x
2i
G
1(s)
G
2(s)
+
-x
1*K
lcf '
G
A*(s)
G
B*(s)
x
1f '
Figura 5.7 Rappresentazione schematica del sistema martinetto di carico/cella di carico e della struttura del banco
Lo schema di Fig 5.5 resta valido se si sostituiscono a G3(s) e G4(s) le seguenti:
( )
( ) ( )
( )
[
[
( )
]
]
s G 1 s G k 1 1 s G s G k s G * A 2 lc * A 1 lc * 3 − + − = (5.22)( )
( )
[
( )
( )
]
s G 1 s G k 1 s G k s G * A 2 lc * B lc * 4 − + = (5.23)f '
i
G
3*(s)
G
4*(s)
x
1Figura 5.8 Rappresentazione schematica del sistema
5.4 Loop per il controllo sul carico applicato
Il martinetto di carico viene comandato attraverso una servovalvola (modello Star hydraulics 890-0013) di tipo flapper nozzle.
Tale componente non viene modellizzato nel presente lavoro, ma si tiene conto del suo comportamento dinamico con una funzione di trasferimento del II° ordine Gsv(s) che lega la corrente comandata (ii) alla corrente effettiva (i):
( )
1 s 2 s 1 1 s G i i SV SV 2 2 SV SV i + + = = ? ? ? (5.24)Il valore dei parametri ωSV e ζSV è stato ricavato dai dati riportati in Appendice
4.
Il sistema dinamico servovalvola/struttura banco/cella di carico è illustrato in Fig 5.9.
x2 i
G
1(s)
G
2(s)
+
-Klc f ' GSV(s) ii Cella di carico Martinetto di carico Servovalvola di comandodel Martinetto di carico
x1*
G
A*(s)
G
B*(s)
x1
Struttura di collegamento cella di carico-attuatore velivolo f '
Figura 5.9 sistema dinamico servovalvola/struttura banco/cella di carico
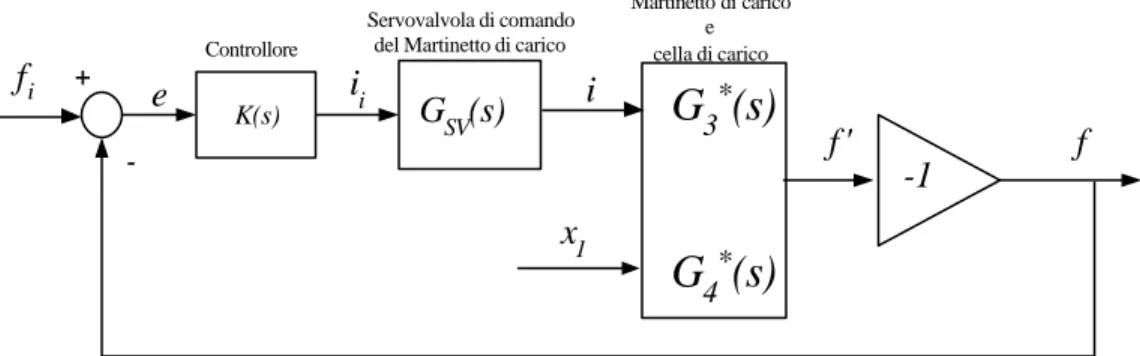
Il loop di controllo sul carico applicato sull’attuatore velivolo f è rappresentato in figura 5.10.
Va osservato che la forza applicata sull’attuatore velivolo è assunta positiva nel caso che tenda ad estrarre lo stelo dell’attuatore. Nella schematizzazione presentata si ha quindi:
f
f '=− (5.25)
Per tale motivo nello schema di ciclo chiuso è stato inserito un guadagno (-1) prima della retroazione.
i
G
3 *(s)
G
4*(s)
x1 f ' GSV(s) ii Martinetto di carico e cella di carico Servovalvola di comandodel Martinetto di carico
K(s) fi + -e Controllore f -1
Figura 5.10 Loop di controllo sul carico
La forza f applicata sull’attuatore velivolo è data da:
( )
s f G( )
s sx1 G f = α i + β (5.26) dove( )
( )
( )
( )
( )
s G( )
s G( )
s K s G s G s K s G SV SV * 3 * 3 1− − = α (5.27)( )
( ) ( ) ( )
s s G s G s K G s G SV 1 1 3* * 4 − − = β (5.28)Si osservi che si è scelto di evidenziare la dipendenza dalla forza applicata dalla velocità dell’attuatore velivolo, piuttosto che dallo spostamento di quest’ultimo, anticipando le considerazioni che in seguito verranno esposte. Il polo
nell’origine messo in evidenza nella (5.28) cancella uno zero posto a numeratore.
5.5 Progetto del controllore
Per il progetto del controllore K(s) si assume che lo spostamento x1 sia nullo,
come in effetti avviene nella realtà, durante la messa a punto dell’hardware, in cui questa condizione viene ottenuta sostituendo all’attuatore velivolo una barra d’acciaio di lunghezza pari a quella dell’attuatore con il pistone in mezzeria in modo da mantenere fisso il punto in cui esso viene incernierato.
In questo modo il blocco Martinetto di carico e cella di carico si modifica secondo lo schema di Fig 5.11.
f
i
iMartinetto di carico/cella di carico
K(s)
f
i +-e
Controllore G(s)Figura 5.11 Schema usato per la sintesi del controllore
dove la funzione di trasferimento G(s) è data da:
( )
s G( )
s G( )
sG SV *
3 −
= . (5.29)
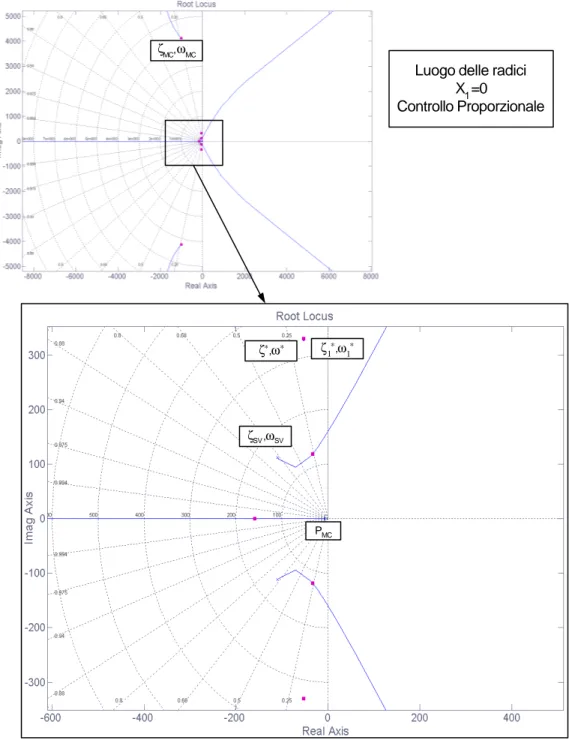
La funzione di trasferimento G(s) è caratterizzata da tre coppie di poli complessi coniugati e da un polo reale tutti stabili. Delle coppie di poli complessi coniugati, una è rappresentativa della dinamica oscillatoria di
altissima frequenza del martinetto di carico (ωMC), una è caratteristica della
dinamica della servovalvola (ωSV) ed una della dinamica della massa m* (ω*) Il
polo reale PMC è invece rappresentativo della dinamica della pressione nelle
camere del martinetto di carico. Nella tabella 5.1 sono riportati i poli e gli zeri della G(s) ⋅⋅ ⋅ + + + + + + = 1 2 1 2 1 2 ) ( 2 2 2 2 * 1 * 1 2 * 1 2 s s s s s s K s G SV SV SV MC MC MC G ω ζ ω ω ζ ω ω ζ ω + + + ⋅⋅ ⋅ 1 1 2 1 * * 2 * 2 MC P s s s ω ζ ω (5.30) Guadagno della FdT
Denominazione Valore del guadagno
KG - 2.1525E+007 N/A
Zeri della FdT
Denominazione Valore dello zero Frequenza (rad/sec) Smorzamento
ζ1*, ω1* -52.5±3.2956E2i 333.72 0.16 Poli della FdT
Denominazione Valore del polo Frequenza (rad/sec) Smorzamento
PMC -6.056 6.056 1
ζSV, ωSV -109.96±112.18i 157.08 0.7 ζ*
, ω* -53.091±329.8i 334.24 0.158
Tabella 5.1
La funzione di trasferimento f/fi risulta infine:
( ) ( )
( ) ( )
s G s K s G s K f f i + = 1 (5.31) 5.5.1 Controllo proporzionaleNell’ipotesi di applicare un controllo proporzionale si ha
( )
s KPK =
e la scelta del valore del guadagno KP viene effettuata utilizzando il criterio del
margine di fase, imponendo che ΦM≥45°.
La sintesi del controllore è stata effettuata per mezzo del toolbox di Matlab SISOtool che consente, data la funzione di trasferimento del sistema in ciclo aperto G(s), di inserire la funzione di trasferimento del controllore e di verificare automaticamente le caratteristiche del sistema in ciclo chiuso.
Il diagramma di Bode in ciclo aperto è riportato in Fig 5.12.
Tale diagramma viene tracciato assumendo, sul diagramma dei moduli, la retta di chiusura come origine dell’asse delle ordinate (retta a 0 dB), in questo modo il valore asintotico assunto dalla G(jω) per ω→0 permette di dare una stima dell’errore che, in ciclo chiuso, si ottiene a seguito di un ingresso a gradino.
X1=0 Controllo Proporzionale
Figura 5.12 Diagramma di Bode in ciclo aperto nel caso di controllo proporzionale
Con riferimento al set di dati riportati in Appendice 2, con un guadagno del controllore pari a:
N
A
E
K
P=
7
−
7
si ottiene un margine di fase pari a:deg 9 . 44
=
PM ed un margine di guadagno di: GM =7.87dB. L’errore asintotico sulla risposta a gradino di ciclo chiuso è invece pari a:
065 . 0 ) 0 ( 1 1 = + = G K errore P (5.32)
Nelle Fig 5.13 e 5.14 si riportano rispettivamente il luogo delle radici, nel quale la posizione dei poli in ciclo chiuso è evidenziata in rosso, ed il diagramma di Bode in ciclo chiuso.
Luogo delle radici X1=0 Controllo Proporzionale ζMC,ωMC ζ∗,ω∗ ζSV,ωSV PMC ζ1∗,ω1∗
Ciclo chiuso: X1=0 Controllo Proporzionale
Figura 5.14 Diagramma di Bode in ciclo chiuso con controllore Proporzionale
Guadagno della FdT f/fi in ciclo chiuso
9.383E-1 Zeri della FdT f/fi in ciclo chiuso
Autovalore Frequenza (rad/sec) Smorzamento
-52.5±3.2956E2i 333.72 0.16
Poli della FdT f/fi in ciclo chiuso
Autovalore Frequenza (rad/sec) Smorzamento
-33.4±118i 123 0.272
-159 159 1
-53.1±330i 334 0.159
5.5.2 Controllo proporzionale integrale
Per eliminare l’errore a regime della risposta in ciclo chiuso è possibile utilizzare un controllore di tipo proporzionale-integratle (PI) la cui funzione di trasferimento è del tipo:
( )
+ = + = s 1 K K s K s K K s K I P I I P (5.33)Lo zero del controllore viene posizionato tra il polo nell’origine ed il polo reale relativo al martinetto di carico (Pm c = -6.056 ) in modo da non influenzare
troppo l’andamento del luogo delle radici ed evitare over-shoot sulla risposta.:
sec / 4 1 rad K K T P I E = = .
Il valore del guadagno è stato scelto ancora una volta in modo da ottenere un margine di fase in ciclo chiuso ΦM≥45°.
6 5 . 2 − = E KI
A seguito di queste scelte si sono ottenuti, come si può vedere dal diagramma di Bode in ciclo aperto riportato in Fig 5.15, i seguenti valori del margine di fase e del margine di guadagno:
PM = 47.5 deg
X1=0
Controllo Proporzionale Integrale
Figura 5.15 Diagramma di Bode in ciclo aperto con controllore PI
Nella Fig 5.16 è riportato il luogo delle radici relativo al caso di controllore PI mentre in Fig 5.17 si può vedere il diagramma di Bode in ciclo chiuso.
Luogo delle radici X1=0
Controllo Proporzionale Integrale ζMC,ωMC
ζ∗,ω∗ ζ1∗,ω1∗
ζSV,ωSV
1/TE
Ciclo Chiuso: x1=0
Controllo Proporzionale Integrale
Guadagno della FdT f/fi in ciclo chiuso
1.003 Zeri della FdT f/fi in ciclo chiuso
Autovalore Frequenza (rad/sec) Smorzamento
-4 4 1
-52.5±3.2956E2i 333.72 0.16
Poli della FdT f/fi in ciclo chiuso
Autovalore Frequenza (rad/sec) Smorzamento
-3.9 3.9 1
-37±112i 118 0.314
-148 148 1
-53.1±330i 334 0.159
Figura 5.17Diagramma di Bode in ciclo chiuso con controllore PI
5.5.3 Controllo proporzionale integrale derivativo
Il controllore analizzato nel paragrafo precedente consente di annullare l’errore a regime nel caso di ingresso a gradino, ma come si vede dalla Fig 5.17 la banda passante non migliora di molto rispetto a quella relativa al controllore proporzionale. Per fare in modo che questa aumenti, senza diminuire troppo lo smorzamento del sistema, si può utilizzare un controllore di tipo Proporzionale Integrale Derivativo (PID):
( )
+ + = + + = + + = 1 1 1 2 1 2 E E I I D I P I D I P T s T s s K s K K s K K s K s K s K K s K (5.34)I guadagni della K(s) sono stati scelti in modo che vi siano due zeri reali, uno a –4 rad/sec (paragrafo 5.4.2) e l’altro a –40 rad/sec. La scelta relativa alla posizione di quest’ultimo zero è stata fatta osservando che il comportamento del sistema in alta frequenza è fortemente influenzato dai poli complessi coniugati della servovalvola e dal polo reale PMC.
Infatti, la coppia di poli complessi relativi all’attuatore sono di altissima frequenza, quindi ininfluenti, mentre la coppia di zeri della funzione di trasferimento G(s) è molto vicina alla coppia di poli complessi relativi alla dinamica della massa m* annullandone l’effetto (cancellazione). Se si osserva la figura 5.16, il luogo delle radici del sistema presenta tre asintoti posti a 120 gradi con i poli complessi coniugati relativi alla servovalvola che attraversano l’asse immaginario ed instabilizzano il sistema. L’aggiunta del secondo zero del controllore PID abbassa di uno la differenza d’ordine del sistema, che nella gamma di frequenze di interesse, presenta due asintoti verticali. La posizione di
questo zero influenza la posizione del baricentro degli asintoti che è data dalla (equazione riportata in [5]): m n P Z x n n m m b − − =
∑
∑
(5.35)dove xb è la posizione del baricentro degli asintoti sull’asse reale, Zm è il valore
dello zero m-esimo, Pn quello del polo n-esimo, n è il numero dei poli e m
quello degli zeri. Nel nostro caso risulta:
2 2 2 SV SV b Z x ≅ − ζ ω (5.36)
Come si può vedere se si posiziona lo zero del controllore nell’origine, cancellando il polo del controllore PI, la posizione degli asintoti coincide con quella dei poli complessi della servovalvola ed il sistema risulta più stabile. In questo modo però si annulla l’azione del controllo integrale. Per non influenzare l’azione integrale del controllore si è quindi deciso di posizionare lo zero a distanza di una decade rispetto allo zero di bassa frequenza. Il valore di KI è stato stabilito in modo da ottenere un margine di fase ΦM≥45°:
6 25 . 3 − = E KI
In seguito a tali scelte si ottiene:
PM = 45.5 deg;
Nelle figure seguenti si possono vedere il diagramma di Bode in ciclo aperto, il luogo delle radici ed il diagramma di Bode, assieme al valore dei poli, in ciclo chiuso.
x1=0
Controllo Proporzionale Integrale Derivativo
Luogo delle radici X1=0
Controllo Proporzionale Integrale Derivativo
ζMC,ωMC
1/TE1 PMC
ζSV,ωSV
1/TE2
Ciclo Chiuso: x1=0
Controllo Proporzionale Integrale Derivativo
Guadagno della FdT f/fi in ciclo chiuso
9.9908E-1 N/A Zeri della FdT f/fi in ciclo chiuso
Autovalore Frequenza (rad/sec) Smorzamento
-4 4 1
-40 40 1
-52.5±3.2956E2i 333.72 0.16
Poli della FdT f/fi in ciclo chiuso
Autovalore Frequenza (rad/sec) Smorzamento
-3.92 3.92 1
-31.6 31.6 1
-90.7±276i 291 0.312
-54.2±330i 334 0.162
Figura 5.20Diagramma di Bode in ciclo chiuso per controllore PID
5.6 Effetto della velocità dell’attuatore velivolo sul carico applicato
Nel seguito del capitolo si considera soltanto il caso di controllore proporzionale in quanto il controllore impiegato effettivamente nel banco prova è di questo tipo. In questo modo si potranno effettuare dei confronti fra i risultati dell’analisi teorica e dalla modellizzazione, che verrà svolta più avanti, ed i risultati ottenuti durante la messa a punto dell’hardware.
L’espressione di Gβ(s) (vedi equazione (5.28)), della quale si riportano i valori dei poli e degli zeri nella tabella 5.2, risulta:
( )
⋅ ⋅⋅ + + + + + + + + = 1 2 1 2 1 1 1 2 2 2 2 2 2 1 1 2 1 2 2 1 2 2 s s s s Z s Z s s s K s G cc cc cc cc cc cc G G SV SV SV G ω ζ ω ω ζ ω ω ζ ω β β β β + + + + ⋅⋅ ⋅ 1 1 2 1 4 3 3 2 3 2 3 cc cc cc cc G P s s s Z s ω ζ ω β (5.37)Come anticipato nel paragrafo precedente la forza applicata sull’attuatore velivolo dipende, tramite la funzione di trasferimento Gβ(s) dalla velocità con cui questo si muove. Di conseguenza, con una forza impostata Fi costante, l’
andamento della forza f segue l’andamento della velocità dell’attuatore velivolo.
Tabella 5.2
La soluzione adottata per risolvere tale problema è quella di retroazionare il segnale di velocità v1 (rilevato da un apposito trasduttore posto sull’attuatore
velivolo), moltiplicato per un opportuno guadagno (Kv), sommandolo al valore
di spostamento richiesto in ingresso alla servovalvola che comanda il martinetto di carico secondo lo schema di Fig 5.21.
Guadagno della FdT Gβ(s)
Denominazione Valore del guadagno
KGβ -6.9284E+003 mN/mm/sec
Zeri della FdT Gβ(s)
Denominazione Valore dello zero Frequenza (rad/sec) Smorzamento
ζSV,ωSV -110±112i 157 0.7 ZGβ3 -312 312 1 ZGβ2 -1060 1060 1 ZGβ1 -1690 1690 1 Poli della FdT Gβ(s) Denominazione
Valore del polo Frequenza (rad/sec) Smorzamento
ζcc3,ωcc3 -33.4±118i 123 0.272
Pcc4 -159 159 1
ζcc2,ωcc2 -53.1±330i 334 0.159
i
G
3*(s)
G
4*(s)
x1 f ' GSV(s) ii Martinetto di carico e cella di carico Servovalvola di comandodel Martinetto di carico
K(s) fi + -e Controllore f -1 v1 1/s Kv + + ei
Figura 5.21Schema del sistema in ciclo chiuso con retroazione della velocità dell'attuatore
In questo modo la forza f è data da:
( )
( )
1 ~ ~ sx s G f s G f = α i + β (5.38) con( )
( )
( )
( )
( )
s G( )
s G( )
s K s G s G s K s G SV SV * 3 * 3 1 ~ − − = α ; (5.39)( )
( ) ( ) ( )
( ) ( ) ( )
s G s G s K 1 s G s G s K s G s G~ SV * 3 SV * 3 v * 4 − + − = ß (5.40)Come si può vedere dalla 5.28 risulta:
( )
( )
( ) ( )
( )
s G s K s G K s G s G v + + = β β 1 ~ (5.41) ovvero( )
( )
( )
( )
s s N K s N s G cc v ∆ + = β β ~ (5.42)dove con N(s) si è indicato il numeratore della funzione di trasferimento G(s) (equazione (5.29)), con Nβ(s) il numeratore di Gβ(s) e con ∆cc(s) il
denominatore di in ciclo chiuso. Nβ(s) è un polinomio del quinto ordine in s il cui termine noto può essere annullato, come si vede dalla (5.42) scegliendo un opportuno valore di Kv.
In questo modo nella funzione di trasferimento G~β
( )
s rimane uno zero nell’origine con l’effetto di avere un errore nullo sulla forza a regime in seguito ad un ingresso di velocità a gradino.5.7 Modello Simulink del sistema
Per valutare l’effetto del controllo in velocità di cui si è parlato nel paragrafo precedente è stato realizzato un modello lineare del sistema in ambiente Matlab-Simulink comprendente il martinetto di carico, la servovalvola, il controllore (di tipo proporzionale) e la cella di carico. Il top-level di tale modello, denominato controllo_sul_carico.mdl, è visibile in Fig 5.22 mentre il modello completo è riportato in appendice 1. Come si vede, il modello riproduce lo schema del sistema in ciclo chiuso di Fig 5.21 con l’aggiunta dei blocchi di comando della forza impostata (fi) e dei blocchi contenenti
l’andamento della velocità comandata all’attuatore velivolo. Quest’ultima può assumere un valore che varia tra 20 mm/sec, 40 mm/sec e 60 mm/sec come nei test effettuati sul banco prova.
5.7.1 Risultati della simulazione con spostamento x1 nullo
Questa simulazione è stata effettuata imponendo un valore di x1 nullo ed
utilizzando il valore del guadagno del controllore proporzionale ricavato nel paragrafo 5.4.1. Nella Fig 5.23 è visibile l’andamento del comando, in rosso, e la forza fornita dal martinetto di carico (curva blu).
Comando a gradino f=20 kN onda quadra± 2.5 kN
X1=0
Controllo Proporzionale
5.7.2 Risultati della simulazione con disturbo indotto dalla velocità v1
Per la scelta del valore di Kv si prende come riferimento la condizione in cui la
velocità dell’attuatore velivolo è 40 mm/sec (valore intermedio fra quelli utilizzati nei test). Nella Fig 5.24 si può vedere il risultato della simulazione con un valore nullo di Kv, quindi senza retroazione sulla velocità, ed una forza
impostata (fi) pari a 12 kN. Come si può vedere l’andamento della forza è molto
influenzato dall’andamento di v1 ed in particolare si nota che per velocità
positive il valore della forza è minore di quello desiderato e viceversa.
Simulazione Forza impostata 12 kN (a trazione) V1= 40 mm/sec Controllo Proporzionale Controllo in velocità Kv= 0
Nelle figure 5.25-5.27 si possono vedere i risultati ottenuti al variare di Kv, si
nota che all’aumentare di questo l’errore a regime diminuisce fino quasi ad annullarsi per Kv=0.195. Questo valore è stato mantenuto durante le
simulazioni alle velocità di 20 mm/sec e 60 mm/sec.
Simulazione Forza impostata 12 kN (a trazione) V1= 40 mm/sec Controllo Proporzionale Controllo in velocità Kv= 0.1
Simulazione Forza impostata 12 kN (a trazione) V1= 40 mm/sec Controllo Proporzionale Controllo in velocità Kv= 0.15
Simulazione Forza impostata 12 kN (a trazione) V1= 40 mm/sec Controllo Proporzionale Controllo in velocità Kv= 0.195
Simulazione Forza impostata 12 kN (a trazione) V1= 20 mm/sec Controllo Proporzionale Controllo in velocità Kv= 0.195
Simulazione Forza impostata 12 kN (a trazione) V1= 60 mm/sec Controllo Proporzionale Controllo in velocità Kv= 0.195
Figura 5.29Andamento della forza generata dal martinetto con Kv=0.195 e v1=60mm/s
Come si vede dalle figure 5.28 e 5.29 il valore di Kv scelto fornisce dei risultati
accettabili a tutte le v1 considerate.
5.7.3 Risultati sperimentali con disturbo indotto dalla velocita v1
Nelle figure 5.30-5.32 viene fatto un confronto fra i risultati delle simulazioni ed i risultati ottenuti durante i test sperimentali, svolti per la messa a punto del banco Dowty, con velocità dell’attuatore velivolo rispettivamente di 40 mm/sec, 20 mm/sec e 60 mm/sec.
Si può osservare, dal confronto di Fig 5.30, una buona corrispondenza tra i risultati sperimentali ed i risultati ottenuti dalla simulazione.
Simulazione Forza impostata 12 kN (a trazione) V1= 40 mm/sec Controllo Proporzionale Controllo in velocità Kv= 0.195 7HVWVSHULP HQWDOH )RU]DLP SRVWDWDN1 WUD]LRQH 9 P P VHF &RQWUROOR3URSRU] LRQDOH &RQWUROORLQYHORFLWj .Y 7%'
7HVWVSHULP HQWDOH )RU]DLP SRVWDWDN1 WUD] LRQH 9 P P VHF &RQWUROOR3URSRU]LRQDOH &RQWUROORLQYHORFLWj . Y 7 %'
7HVWVSHULP HQWDOH ) RU]DLP SRVWDWDN1
WUD]LRQH 9 P P VHF &RQWUROOR3 URSRU]LRQDOH &RQWUROORLQYHORFLWj .Y 7 %'
Figura 5.32Andamento della forza generata dal martinetto durante il test con v1=60mm/s
Dai risultati dei test effettuati con velocità di 20 mm/sec (Fig 5.31) e 60 mm/sec (Fig 5.32) si nota una discrepanza con quanto ottenuto dalle simulazioni svolte con il modello lineare e riportate nelle figure 5.28 e 5.29. In particolare si nota che nel test a velocità di 20 mm/sec la risposta risulta sottocompensata, mentre a velocità di 60 mm/s è sovracompensata. Questa differenza tra i risultati della simulazione e quelli dei test può essere spiegata considerando che, a differenza di quanto avviene nella realtà, il valore del guadagno di portata Kq nel modello
è stato considerato costante.
Per tener conto della variazione di tale parametro al variare delle condizioni di lavoro della servovalvola si è inserita, all’interno del blocco Modello martinetto
di carico, una look-up table (visibile in appendice 1) che correla il valore di Kq
all’apertura dello spool della servovalvola. Nelle figure 5.33 e 5.34 si possono vedere i risultati ottenuti, con il modello così modificato, alle velocità rispettivamente di 20 mm/sec (Fig 5.31) e 60 mm/sec, che dimostrano come il modello di simulazione riesce a riprodurre in modo soddisfacente il comportamento del sistema reale.
7HVWVSHULP HQWDOH )RU]DLP SRVWDWDN1 WUD] LRQH 9 P P VHF &RQWUROOR3URSRU]LRQDOH &RQWUROORLQYHORFLWj . Y 7 %' Simulazione Forza impostata 12 kN (a trazione) V1= 20 mm/sec Controllo Proporzionale Controllo in velocità Kv= 0.195 Valore di Kq modificato
Figura 5.33Andamento della forza generata dal martinetto con Kv=0.195 e v1=20mm/s Kq diminuito
7HVWVSHULP HQWDOH )RU]DLP SRVWDWDN1 WUD]LRQH 9 P P VHF &RQWUROOR3 URSRU]LRQDOH &RQWUROORLQYHORFLWj . Y 7 %' Simulazione Forza impostata 12 kN (a trazione) V1= 60 mm/sec Controllo Proporzionale Controllo in velocità Kv= 0.195 Valore di Kq modificato
Figura 5.34Andamento della forza generata dal martinetto con Kv=0.195 e v1=60mm/s Kq aumentato