CAPITOLO 3
TENSORE DI DIFFUSIONE E SUOI INVARIANTI:
IMMAGINI DTI
Le immagini DWI e le mappe ADC costituiscono due esempi importanti per lo studio dei processi di diffusione cerebrale. Nelle prime il contrasto tra le differenti regioni anatomiche ed eventuali lesioni risulta relativamente più marcato rispetto alle mappe ADC: ciò è dovuto all’andamento esponenziale del segnale misurato (eq. 2.29). Tuttavia le mappe ADC non risentono della pesatura in e consentono una descrizione quantitativa dei processi di diffusione molecolare.
2
T
Il limite delle immagini DWI e delle mappe ADC rimane comunque la direzionalità: entrambe le rappresentazioni dipendono inevitabilmente dalla direzione del gradiente di diffusione applicato. Questo comporta che particolari lesioni, a seconda della direzione del gradiente di diffusione, possono non risultare chiaramente evidenziate nelle immagini DWI, e la stessa informazione quantitativa contenuta nelle mappe ADC è strettamente correlata alla direzione di applicazione di tale gradiente.
Per eliminare questi problemi è necessario avere la conoscenza per ogni voxel del “tensore di diffusione” (§ 2.1.4), che permette una descrizione completa dei processi di diffusione molecolare.
Una rappresentazione del tensore di diffusione consiste nella realizzazione di mappe di opportuni suoi “invarianti”.
3.1 Tensore di diffusione: definizione
Riprendendo una formula vista in un capitolo precedente si ha:
( )
( )
⎟⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ − =∑∑
= = 3 1 i 3 1 j j i j i D b exp 0 S S b (3.1)dove S(0) è il segnale misurato per b≡0, gli elementi appartengono al tensore di diffusione
j i D
D e gli elementi bij della matrice b sono dati da:
=
∫
( ) ( )
(3.2) TE 0 dt' t' k t' k bij i j con:( )
=γ∫
( )
(3.3) t 0 dt' t' t G kdove TE è il tempo di eco e G(t) la sommatoria dei gradienti di diffusione e di imaging applicati.
Il tensore di diffusione che analizzeremo è caratterizzato dall’essere simmetrico, cioè dall’avere sei elementi indipendenti. Proprio per questo motivo per la determinazione di tale tensore sarà necessario registrare sei immagini DWI lungo sei direzioni non collineari ed un’immagine non pesata in diffusione (per l’individuazione di S(0)): in genere è opportuno scegliere le sei direzioni in modo da campionare uniformemente lo spazio
tridimensionale. Risolvendo quindi un sistema di 6 equazioni in 6 incognite derivante dalla (3.1) si ottengono i valori dei coefficienti Dij.
L’applicazione di tale metodo di calcolo consente di quantificare esattamente la “diffusione” in ogni punto (voxel), sia in termini di ampiezza assoluta che di direzione e verso. Il metodo risulta inoltre indipendente dalla direzione di applicazione dei gradienti, dal valore di b-value e dall’orientamento delle sezioni anatomiche acquisite, tendendo quindi ad avvicinarsi ad una misura “assoluta” della diffusione.
3.2 Traccia del tensore di diffusione
Le informazioni contenute nel tensore di diffusione possono essere visualizzate mediante mappe di “invarianti” che siano funzione degli elementi . Un invariante rispetto a trasformazioni rigide (traslazioni, rotazioni e scaling) che si presta molto bene per caratterizzare i processi di diffusione molecolare è la “traccia”, che è data da:
j i D
∑
(3.4) = = 3 1 i i Tr λdove i sono i tre autovalori del tensore di diffusione. Questi ultimi possono essere considerati come i coefficienti ADC lungo le direzioni individuate dagli assi principali dell’ellissoide di rotazione associato al tensore (vedere appendice A). La traccia risulta quindi proporzionale al coefficiente di diffusione medio lungo tre determinate direzioni mutuamente ortogonali, corrispondenti a quelle individuate da una base ortonormale di autovettori del tensore.
i
Da quanto detto possiamo dedurre come la traccia rappresenti una sorta di ADC indipendente dalla direzione di applicazione dei gradienti di diffusione e senza alcun limite di direzionalità, essendo essa invariante per rotazione.
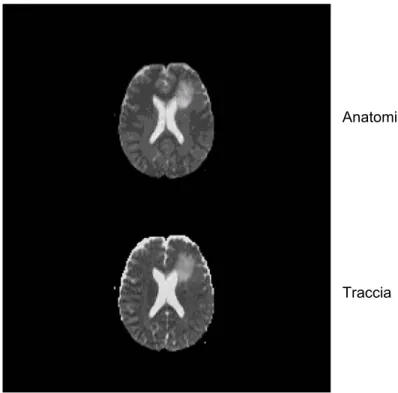
Vediamo un esempio di traccia nei due casi di 6 e 25 direzioni di acquisizione.
Anatomica
Traccia
Figura 3.1: Immagine anatomica (pesata in T2 ) e relativa mappa di traccia a bvalue = 1000 sec/mm2. Le
immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm , matrice 128x128 , spessore slice 4 mm , spaziatura tra slice 1 mm , 24 slice , 1 acquisizione , 6 direzioni di acquisizione , Gd=20 mT/m).
Anatomica
Traccia
Figura 3.2: Immagine anatomica (pesata in T2 ) e relativa mappa di traccia a bvalue = 1000 sec/mm 2
. Le immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm , matrice 128x128 , spessore slice 4 mm , spaziatura tra slice 1 mm , 9 slice , 1 acquisizione , 25 direzioni di acquisizione , Gd=20 mT/m).
Dalle figure precedenti si notano vari aspetti riguardanti le mappe di traccia.
Innanzitutto le zone a maggiore diffusione risultano iperintense: i valori massimi di traccia si ritrovano, infatti, nel liquor (che è, sostanzialmente, acqua libera) e sono dell’ordine di 9 x 10-3 sec/mm2.
Nelle mappe di traccia risulta ben evidenziato il CSF, mentre è minimo il contrasto tra materia grigia e materia bianca: quest’ ultimo aspetto limita notevolmente le applicazioni delle mappe di traccia nell’ambito dello studio e della differenziazione delle strutture anatomiche cerebrali.
Un altro aspetto facilmente ricavabile dalle figure 3.1 e 3.2 riguarda l’evidente correlazione tra alterazione dei valori di traccia e presenza di lesioni o patologie.
3.3 Altri invarianti del tensore di diffusione
In campo neurofisiologico riveste particolare interesse lo studio dei fasci di fibre di sostanza bianca (FSB). Una precisa descrizione anatomica delle diramazioni dei singoli fasci porterebbe all’individuazione di mutue connessioni tra i diversi centri funzionali del sistema nervoso centrale; tali fasci, inoltre, possono essere coinvolti in modo diretto o indiretto nella maggior parte dei quadri patologici dell’encefalo. Purtroppo le conoscenze in tale ambito sono ancora incomplete, ma, come vedremo nell’ultima parte del lavoro, esistono opportuni programmi che permettono la visualizzazione (seppur approssimativa) della traccia di tali fibre di sostanza bianca: e questo grazie all’utilizzo di immagini DTI (Diffusion Tensor Imaging) opportunamente elaborate, sfruttando la caratteristica strutturale dei fasci FSB di essere anisotropi rispetto al fenomeno della diffusione molecolare.
L’idea è quella di visualizzare mappe di opportuni indici invarianti (per rotazione) del tensore di diffusione, i quali descrivano il grado di anisotropia delle varie strutture dal punto di vista della diffusione molecolare.
Il primo indice di anisotropia proposto è il Volume Ratio (VR), definito come:
[
(
)
]
3[
( )
( )
]
3 Tr Det 27 3 VR D D = + + = 3 2 1 3 2 1 λ λ λ λ λ λ (3.5)dove Det
( )
D è dato da:
( )
∏
= = 3 1 i i Det D λ (3.6)Il parametro VR ha un’interpretazione geometrica: esso rappresenta, infatti, il rapporto tra il volume di un ellissoide (associato al tensore D ) avente semiassi maggiori ed il volume di una sfera con raggio pari ad un terzo della traccia del tensore di diffusione. Deduciamo che questo indice di anisotropia è compreso tra 0 (massima anisotropia) ed 1 (assenza di anisotropia).
i
λ
L’indice di anisotropia più importante nel campo del fiber tracking è la Fractional
Anisotropy (FA), che, a differenza del precedente, analizza il fenomeno soltanto da un
punto di vista matematico. Il parametro FA ha la seguente espressione:
(
) (
) (
)
2 3 2 2 2 1 2 3 2 2 2 1 D D D 2 3 FA λ + λ + λ > < − λ + > < − λ + > < − λ = (3.7) dove: Tr( )
D 3 1 D>= < (3.8)Come si può notare la FA rappresenta la frazione di anisotropia contenuta nel tensore D . In particolare fornisce informazioni riguardo la forma dell’ellissoide di rotazione associato al tensore: partendo dal valore nullo per FA, in cui la forma è sferica (diffusione isotropa), per valori maggiori del parametro la forma risulta sempre più allungata, fino a raggiungere la linearità per FA = 1 (massima anisotropia).
I due indici esaminati sono di tipo “intravoxel”, nel senso che per ogni singolo voxel i loro valori dipendono soltanto da quelli degli elementi del tensore di diffusione relativo al voxel in esame. Essi non utilizzano, perciò, tutte le informazioni presenti in D : in particolare
viene trascurata l’informazione spaziale contenuta nei tre autovettori mutuamente ortogonali associati al tensore.
Per spiegare meglio quest’ultimo concetto consideriamo una generica regione in cui la diffusione molecolare sia isotropa: ciò significa che l’ellissoide di rotazione associato al tensore per ogni voxel dovrebbe degenerare in una sfera. In verità, a causa del rumore di fondo, non avremo esattamente una sfera. Se però la diffusione è isotropa l’orientamento dei singoli ellissoidi sarà scorrelato rispetto a quello degli ellissoidi dei voxel adiacenti. Al contrario, in una regione a diffusione anisotropa ogni ellissoide avrà una direzione privilegiata, correlata con quella degli ellissoidi dei voxel confinanti.
Un indice di anisotropia che tiene conto di quest’ultimo effetto di correlazione è il Lattice
Index (LI), che è appunto un indice “intervoxel” che misura il grado di coerenza direzionale
dell’ellissoide di un voxel rispetto a quello dei voxel adiacenti. Per quanto detto sopra l’immagine del parametro LI sarà caratterizzata da un SNR più elevato rispetto a quello degli indici “intravoxel”. L’espressione, alquanto complessa, di LI è la seguente:
( )
∑
∑
= = = 8 1 n 8 1 n n n n a LI a LI (3.9) dove:( )
( ) ( )
( ) ( )
n n n n n n n n : : Tr Tr 3 1 : 4 3 : Tr Tr 3 1 : 8 3 LI D D D D D D D D D D D D D D − + − = (3.10)∑∑
= = ⎟⎠ ⎞ ⎜ ⎝ ⎛ λ λ = 3 ⋅ 1 i 3 1 k ' i i k k ' :D ε 'ε D (3.11)ed è il versore dell’autovettore associato all’autovalore εi λ . i
L’indice della sommatoria nella (3.9) fa riferimento agli 8 voxel adiacenti al voxel di riferimento rispetto a cui viene calcolato il parametro LI ed a cui è associato il tensore D . I coefficienti an sono fattori di peso che assumono valore uguale ad 1 per i voxel vicini aventi in comune con il voxel di riferimento una faccia ed uguale a 1 2 per quelli che
condividono con esso soltanto un vertice. Il range di valori ammessi per l’indice LI va da 0 (assenza di anisotropia) ad 1 (massima anisotropia).
Altri indici di anisotropia utilizzati sono il Close Linear ( ), il Close Planar ( ) ed il
Close Spherical ( ), che hanno la seguente espressione: L C CP S C 1 2 1 L C λ λ − λ = (3.12) 1 3 2 P C λ λ − λ = (3.13) 1 3 S C λ λ = (3.14)
6.4 Mappe di indici di anisotropia
Per la realizzazione di mappe degli indici di anisotropia si utilizza il pacchetto software DPTools.
Le immagini DWI utilizzate sono acquisite nello stesso modo visto nel capitolo precedente.
Anatomica
Mappa FA
Figura 3.3: Immagine anatomica (pesata in T2 ) e relativa mappa di FA a bvalue = 1000 sec/mm2. Le
immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm , matrice 128x128 , spessore slice 4 mm , spaziatura tra slice 1 mm , 24 slice , 1 acquisizione , 6 direzioni di acquisizione , Gd=20 mT/m).
Anatomica
Mappa FA
Figura 3.4: Immagine anatomica (pesata in T2 ) e relativa mappa di FA a bvalue = 1000 sec/mm2. Le
immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm , matrice 128x128 , spessore slice 4 mm , spaziatura tra slice 1 mm , 9 slice , 1 acquisizione , 25 direzioni di acquisizione , Gd=20 mT/m).
Anatomica
Mappa LI
Figura 3.5: Immagine anatomica (pesata in T2 ) e relativa mappa di LI a bvalue = 1000 sec/mm 2
. Le immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm , matrice 128x128 , spessore slice 4 mm , spaziatura tra slice 1 mm , 24 slice , 1 acquisizione , 6 direzioni di acquisizione , Gd=20 mT/m).
Anatomica
Mappa LI
Figura 3.6: Immagine anatomica (pesata in T2 ) e relativa mappa di LI a bvalue = 1000 sec/mm2. Le
immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm , matrice 128x128 , spessore slice 4 mm , spaziatura tra slice 1 mm , 9 slice , 1 acquisizione , 25 direzioni di acquisizione , Gd=20 mT/m).
Anatomica
Mappa VR
Figura 3.7: Immagine anatomica (pesata in T2 ) e relativa mappa di VR a bvalue = 1000 sec/mm 2
. Le immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm , matrice 128x128 , spessore slice 4 mm , spaziatura tra slice 1 mm , 24 slice , 1 acquisizione , 6 direzioni di acquisizione , G=20 mT/m).
Anatomica
Mappa VR
Figura 3.8: Immagine anatomica (pesata in T2 ) e relativa mappa di VR a bvalue = 1000 sec/mm2. Le
immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm , matrice 128x128 , spessore slice 4 mm , spaziatura tra slice 1 mm , 9 slice , 1 acquisizione , 25 direzioni di acquisizione , Gd=20 mT/m).
Anatomica Mappa FA
Mappa LI Mappa VR
Figura 3.9: Immagine anatomica (pesata in T2 ) e relative mappe di FA, LI e VR a bvalue = 1000 sec/mm2.
Le immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm , matrice 128x128 , spessore slice 4 mm , spaziatura tra slice 1 mm , 24 slice , 1 acquisizione , 6 direzioni di acquisizione , Gd=20 mT/m).
Mappa FA Anatomica
Mappa LI Mappa VR
Figura 3.10: Immagine anatomica (pesata in T2 ) e relative mappe di FA, LI e VR a bvalue = 1000 sec/mm 2
. Le immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm, matrice 128x128 , spessore slice 4 mm , spaziatura tra slice 1 mm , 9 slice , 1 acquisizione , 25 direzioni di acquisizione , Gd=20 mT/m).
Il confronto fra le mappe di VR, FA e LI evidenzia come la prima sia molto affetta da rumore rispetto alle altre. La mappa di FA ha un rapporto segnale-rumore accettabile ed in essa sono ben evidenziati i fasci di fibre di sostanza bianca (FSB). Nella mappa di LI il valore del rapporto segnale-rumore è ancora migliore e l’anatomia dei singoli fasci è ben definita: ciò è in relazione al fatto che nel Lattex Index vengono utilizzate tutte le informazioni contenute nel tensore di diffusione, al contrario di quello che accade per gli altri indici esaminati fin qui. Le mappe di LI forniscono, oltre ad un’informazione qualitativa sull’anatomia dei fasci di fibre, anche un’informazione quantitativa che specifica il grado di diffusione anisotropa.
Anatomica Mappa CL
Mappa CS Mappa CP
Figura 3.11: Immagine anatomica (pesata in T2 ) e relative mappe di CL , CP e CS a bvalue = 1000
sec/mm2. Le immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm , matrice 128x128 , spessore slice 4 mm , spaziatura tra slice 1 mm , 24 slice , 1 acquisizione , 6 direzioni di acquisizione , Gd=20 mT/m).
Anatomica Mappa CL
Mappa CP Mappa CS
Figura 3.12: Immagine anatomica (pesata in T2 ) e relative mappe di CL , CP e CS a bvalue = 1000
sec/mm2. Le immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm , matrice 128x128 , spessore slice 4 mm , spaziatura tra slice 1 mm , 9 slice , 1 acquisizione , 25 direzioni di acquisizione , Gd=20 mT/m).
Le mappe di CL e CP possono, a prima vista, sembrare di scarso significato. Esse rappresentano, rispettivamente, la tendenza dei moti molecolari diffusivi ad assumere un’unica direzione spaziale o una qualsiasi direzione appartenente ad un piano nello spazio. Il fatto che la regione del liquor risulti ipointensa conferma comunque la consistenza di tali mappe, essendo essa una zona in cui la diffusione assume un carattere altamente isotropo, come del resto è confermato dall’iperintensità del liquor nella mappa di CS .
Poiché gli indici VR e CS sono entrambi legati al grado di isotropia dei moti diffusivi (al contrario degli altri indici esaminati, correlati al grado di anisotropia), vediamo un loro confronto diretto:
Mappa VR Mappa CS
Figura 3.13: Mappe di VR e di CL elaborate a bvalue = 1000 sec/mm 2
. Le immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm , matrice 128x128 , spessore slice 4 mm , spaziatura tra slice 1 mm , 24 slice , 1 acquisizione , 6 direzioni di acquisizione , Gd=20 mT/m).
Mappa VR Mappa CS
Figura 3.14: Mappe di VR e di CL elaborate a bvalue = 1000 sec/mm 2
. Le immagini si riferiscono ad un’unica slice di uno stesso paziente. (TR = 6000 ms , FOV =24x24 cm , matrice 128x128 , spessore slice 4
Possiamo notare come nelle mappe di CS il rapporto segnale-rumore sia ancora più basso che nelle mappe di VR e quindi le varie strutture anatomiche risultano ancora meno definite.