4
Sintesi degli autopiloti
4.1
Aspetti generali
Il velivolo del “Progetto SCAUT” e con esso il modello UAV in scala del LMV, oggetto del seguente studio, hanno quale principale obiettivo quello del monitoraggio di definite porzioni di territorio a partire da vari valori di quota e velocit`a, potendo effettuare particolari tipologie di manovre.
Da questi presupposti si comprende come il compito attribuito alla gestione automatica del volo assuma un ruolo di fondamentale importanza al fine di eseguire le specifiche di missione.
Per far fronte a queste esigenze sono stati quindi sviluppati diversi autopiloti relativi ai piani longitudinale e laterodirezionale.
Nel presente Capitolo verranno descritte in dettaglio tutte le sintesi riguar-danti ogni singolo autopilota; in seguito sar`a sviluppata un’attenta analisi della loro integrazione nel FMS e di possibili combinazioni di accensione. Strumenti fondamentali per lo studio delle f.d.t. in ciclo aperto e per l’analisi e la sintesi delle strutture dei controllori si individuano nei luoghi delle radi-ci e nei diagrammi di Bode generalizzati relativi alle f.d.t. interessate dalla retroazione stessa.
Perci`o `e stato necessario utilizzare un modello linearizzato del sistema in va-riabili di stato, non direttamente estratto dal modello Simulinkr, sebbene ci`o sia possibile anche se con pi`u laboriosa attuazione come descritto in [3], ma determinato dalle equazioni linearizzate del moto ricavate utilizzando esclu-sivamente l’insieme di routines Matlabr contenute nel FDT (Flight Dynamic
Toolbox ) allegato a [11].
L’insieme di tali routines consente di costruire facilmente in ambiente Matlabr i modelli matematici necessari per lo studio della dinamica del velivolo, sia in ciclo aperto che in ciclo chiuso.
L’analisi di tutti i sistemi di controllo effettuata in questo lavoro di tesi `e stata realizzata per diverse condizioni di volo di seguito definite, scelte in maniera arbitraria al fine di creare un range variazionale significativo. In particolare la CV 1 rappresenta quella tipica di crociera.
Si individua nella pressione dinamica DP il parametro di volo fondamentale per la regolazione dei guadagni di chiusura dei vari sistemi di controllo, la cui struttura, in termini di zeri e di poli, si mantiene invece inalterata. Gli altri parametri necessari per la ricerca delle diverse condizioni di trim, per mezzo del file Trimmer.m, si lasciano invece uguali per tutte: cio`e pendenza della traiettoria γ nulla e peso W pari a quello di decollo.
CV H [m] V [m/s] DP [Pa] γ [deg] W [Kg] 0 1000 60 2000.95 1 1000 52 1502.90 2 800 45 1147.80 3 600 40 924.78 0 50.02 4 400 35 721.90 5 200 30 540.74 6 100 25 379.15
Tabella 4.1: Condizioni di volo
I guadagni di chiusura, variabili con la pressione dinamica DP, si scelgono in ogni caso tali da soddisfare le specifiche richieste di un sistema di tipo autopilota, che possono essere cos`ı riassunte:
• Errore asintotico nullo per ingresso a gradino. • Margine di fase > 60◦.
• Margine di fase > 6 dB.
• Banda passante minima accettabile.
• Risposta in frequenza in ciclo chiuso piatta fino alla frequenza di taglio, a meno di un errore compreso tra ± 7 dB.
4 – Sintesi degli autopiloti
4.2
Autopiloti del piano longitudinale
La dinamica del velivolo sul piano longitudinale risulta sostanzialmente ca-ratterizzata dai due seguenti modi:
• Modo di corto periodo, che `e essenzialmente l’oscillazione del velivolo intorno all’incidenza di equilibrio; coinvolge quindi l’angolo di inciden-za α, l’angolo di assetto θ, la velocit`a angolare di beccheggio q e la pendenza della traiettoria γ; possono invece ritenersi trascurabili le va-riazioni di velocit`a orizzontale u.
La dinamica del velivolo `e caratterizzata da una coppia di poli complessi coniugati con elevata pulsazione ωSP e relativamente alto smorzamento
ξSP.
• Modo di lungo periodo o fugoide, caratterizzato principalmente da va-riazioni dell’angolo di incidenza α trascurabili rispetto a quelle di velo-cit`a u e di angolo di assetto θ.
La dinamica del velivolo `e caratterizzata in generale da una coppia di poli complessi coniugati con bassa pulsazione ωP e basso smorzamento
ξP.
Per comprendere meglio le scelte effettuate per gli autopiloti e per avere una migliore visione della dinamica nel suo insieme, di seguito vengono evidenziati i valori dei poli che caratterizzano la dinamica longitudinale in ciclo aperto del velivolo:
Corto periodo Lungo periodo CV ωSP [rad/s] ξSP ωP [rad/s] ξP 0 13.7302 0.4494 0.2190 0.2516 1 11.8963 0.4492 0.2524 0.2117 2 10.4035 0.4528 0.2911 0.1874 3 9.3441 0.4564 0.3271 0.1753 4 8.2587 0.4598 0.3735 0.1683 5 7.1460 0.4629 0.4357 0.1682 6 5.9710 0.4636 0.5239 0.1783
4.2.1
Pitch Damper
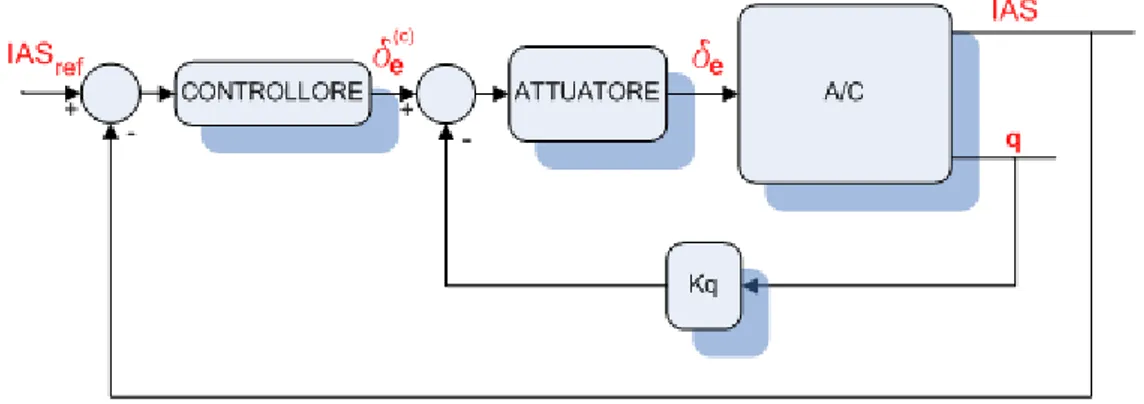
I sistemi di controllo oggetti del presente lavoro di tesi si realizzano tutti tra-mite sistemi multiloop costituiti da uno o pi`u SAS (Stability Augmentation System) e dall’autopilota propriamente detto.
In particolare, relativamente al piano longitudinale, lo schema generale se-guito `e quello di sintetizzare un sistema di aumento della stabilit`a SAS detto pitch damper avente lo scopo di incrementare lo smorzamento dei poli di corto periodo al fine di migliorare le qualit`a di volo.
Il nome del dispositivo deriva dal fatto che viene appunto aumentato lo smor-zamento in pitch, cio`e in beccheggio, del velivolo.
Tale sistema costituisce il loop interno del sistema M.I.M.O. (Multi Input Multi Output ) e le sue caratteristiche rimangono le stesse per ogni autopilo-ta.
I valori desiderati del coefficiente di smorzamento di corto periodo ξSP
pos-sono essere ottenuti misurando la variazione della velocit`a angolare di bec-cheggio q attraverso un giroscopio e portando in retroazione il segnale cor-rispondente, il quale viene amplificato con il guadagno Kq e sommato con
l’ingresso diretto da parte del pilota, ottenendo cos`ı l’angolo di deflessione di equilibratore δe richiesto in ingresso al sistema comprensivo di attuatore,
come mostrato in Figura 4.1.
L’ipotesi assunta, a carattere del tutto generale, `e che gli strumenti di misu-razione delle varie grandezze possano essere equiparati a sensori ideali cio`e con f.d.t. unitarie.
4 – Sintesi degli autopiloti
La procedura seguita `e quindi quella di ricercare, per mezzo degli strumenti definiti al §4.1, i valori dei guadagni Kq che rendano massimi i valori degli
smorzamenti ξSP per ogni condizione di volo CV.
I risultati ottenuti, in termini di guadagni e di poli di lungo e di corto periodo modificati, sono riportati in Tabella 4.3:
Corto periodo Lungo periodo CV Kq [s] ωSP [rad/s] ξSP ωP [rad/s] ξP 0 -0.00738 14.6340 0.4668 0.2165 0.2534 1 -0.02750 14.9141 0.5153 0.2437 0.2159 2 -0.04460 14.5025 0.5915 0.2772 0.1915 3 -0.06030 13.2291 0.6866 0.3082 0.1791 4 -0.07480 11.0761 0.6995 0.3499 0.1712 5 -0.08540 8.9956 0.6835 0.4083 0.1698 6 -0.10600 7.2720 0.6855 0.4896 0.1790
Tabella 4.3: Guadagni di chiusura del pitch damper
Si consideri, ad esempio, la tipica CV 1: la funzione di trasferimento q/δe
in ciclo aperto comprensiva di attuatore `e espressa da q
δe
= −50764.0769 · s · (s + 3.592) · (s + 0.09122)
(s2+ 0.1068s + 0.06368) · (s2+ 10.69s + 141.5) · (s2+ 31.36s + 490.2)
dove si nota al numeratore lo zero nell’origine (q = ˙θ), uno zero 1/Tθ1 =
0.09122 di bassa frequenza ed uno zero 1/Tθ2 = 3.592 di frequenza medio
-alta; al denominatore, oltre i poli di corto e di lungo si notano quelli propri dell’attuatore del comando di equilibratore, la cui f.d.t. determinata in [5] `e:
Attδe(s) =
0.95345
0.00204s2+ 0.06398s + 1 =
467.38 s2+ 31.36s + 490.2
Le Figure 4.2 e 4.3 mostrano il luogo delle radici relativo alla funzione di trasferimento sopra descritta in modo da evidenziare, tramite marcatura dei poli in ciclo chiuso, la chiusura del sistema in corrispondenza del guadagno Kq definito in Tabella 4.3.
Infine, in ciclo chiuso si ottiene: qcc
Figura 4.2: Luogo delle radici di q/δe con attuatore: alta frequenza
4 – Sintesi degli autopiloti
4.2.2
Autothrottle
Un ulteriore sistema di aumento della stabilit`a preso in esame `e il cosiddetto autothrottle, ovvero il controllo automatico della manetta.
Per mezzo della retroazione della variazione della velocit`a longitudinale u si va ad intervenire su una particolare derivata aerodinamica (Xu), la quale
ca-ratterizza la posizione dello zero di bassa frequenza (1/Th1) della f.d.t della
quota su equilibratore (h/δe) rispetto al’asse immaginario: il sistema agisce
in maniera tale da modulare la manetta al fine di non instabilizzare lo zero sopra citato.
Se questo fose consentito si avrebbe la perdita, in ciclo aperto, della corrispon-denza intuitiva tra l’angolo di assetto e quello della pencorrispon-denza di traiettoria e perci`o molto utile al pilota; in ciclo chiuso ci`o potrebbe portare a problemi di instabilizzazione del sistema di controllo.
In effetti tale dispositivo si inserisce solamente per l’autopilota della velocit`a verticale e per quello della quota, in quanto direttamente interessati dalla f.d.t coinvolta.
Nella Figura seguente si mostra come la posizione dello zero in questione stia ad indicare su quale ramo della curva della trazione necessaria il velivolo risulti trimmato e come, a seguito di variazioni di equilibratore richieste per compiere determinate manovre, l’autothrottle agisca tramite compensazione della manetta.
Infatti, se le condizioni iniziali di trim sono troppo vicine a quelle di efficien-za massima o il velivolo tendesse ad oltrepassarle per soddisfare le richieste dell’autopilota in caso di salita (Vzref > 0), l’aumento di manetta
contraste-rebbe questa tendenza.
Se al contrario, la condizione di partenza `e troppo vicina a quella di massima velocit`a o il velivolo ci si avvicina per soddisfare le richieste dell’autopilota in caso di discesa (Vzref < 0), la diminuzione di manetta limiterebbe l’aumento
Figura 4.4: Effetti dell’autothrottle
Figura 4.5: Schema dell’autothrottle
La procedura seguita `e quella di ricercare i valori dei guadagni Ku che
rendano massimi i valori degli smorzamenti ξP dei poli di lungo periodo al
fine di aumentare il modulo della derivata Xu per ogni condizione di volo
CV.
I risultati ottenuti, in termini di guadagni e di poli di lungo e di corto periodo modificati, sono riportati in Tabella 4.4: si pu`o notare come lo smorzamento dei poli di corto periodo non sia diminuito per effetto di questa retroazione e come i polo di lungo periodo siano stati avvicinati verso l’asse reale.
4 – Sintesi degli autopiloti
Corto periodo Lungo periodo CV Ku [s/m] ωSP [rad/s] ξSP ωP [rad/s] ξP 0 0.080 14.6234 0.4658 0.235 0.962 1 0.090 14.8796 0.5135 0.237 0.960 2 0.110 14.4495 0.5862 0.307 0.968 3 0.130 13.2717 0.6818 0.345 0.973 4 0.155 11.0865 0.6957 0.397 0.970 5 0.185 8.9954 0.6790 0.473 0.963 6 0.220 7.2640 0.6788 0.585 0.966
Tabella 4.4: Guadagni di chiusura dell’autothrottle
Il sistema gi`a comprensivo di pitch damper (§4.2.1) viene chiuso quindi con un’ulteriore loop riguardante la velocit`a longitudinale u con comando di ma-netta.
La f.d.t. dell’attuatore del motore `e data da: Attδth(s) =
0.818
0.00345s2+ 0.06917s + 1 =
237.1
s2+ 20.05s + 289.9
La f.d.t. in ciclo aperto interessata dalla retroazione, comprensiva di attua-tore e sempre relativamente alla CV 1 di studio, risulta:
u δth = 1249.6602 · (s + 0.02492) · (s 2+ 26.36s + 326.8) (s2+ 0.1052s + 0.05939) · (s2+ 26.68s + 334.4)· · (s 2+ 16.12s + 230.9) (s2+ 20.05s + 289.9) · (s2+ 15.37s + 222.4)
Le Figure 4.6 e 4.7 mostrano il luogo delle radici relativo alla funzione di trasferimento sopra descritta in modo da evidenziare, tramite marcatura dei poli in ciclo chiuso, la chiusura del sistema in corrispondenza del guadagno Ku definito in Tabella 4.4.
Infine, in ciclo chiuso si ottiene: u δth cc = 1249.6602 · (s + 0.02492) · (s 2+ 26.36s + 326.8) (s2+ 0.5118s + 0.0711) · (s2+ 26.69s + 334.3) · · (s 2+ 16.12s + 230.9) (s2+ 19.72s + 283.5) · (s2+ 15.28s + 221.4)
Figura 4.6: Luogo delle radici di u/δth con attuatore: alta frequenza
4 – Sintesi degli autopiloti
4.2.3
Analisi e sintesi dell’autopilota della IAS
(Indicated Air Speed )
La IAS (Indicated Air Speed ) `e la velocit`a indicata rispetto all’aria misurata a bordo del velivolo tramite una capsula barometrica che registra la differenza di pressione tra quella di arresto al suo interno e quella statica dell’ambiente esterno ([10]). Solo nel caso in cui le condizioni ambientali corrispondano a quelle standard di taratura dello strumento la IAS indica anche la vera velocit`a di volo V rispetto all’aria; in ogni altro caso vale la relazione:
IAS = V ·r ρ ρ0
(4.1)
Il sistema modificato dalla retroazione descritta al §4.2.1 viene ora ad essere chiuso da un’ulteriore loop esterno riguardante la IAS al fine di definirne il sistema di autopilotaggio.
La Figura 4.8 mostra il sistema completo multiloop.
Figura 4.8: Schema dell’autopilota della IAS
La f.d.t. interessata dalla retroazione risulta, sempre per la CV 1: IAS δe = −177.4846 · (s − 1183) · (s 2+ 4.722s + 8.135) (s2+ 0.1052s + 0.05939) · (s2 + 26.68s + 334.4) · (s2+ 15.37s + 222.4) (4.2) La struttura della rete di compensazione ([12]) `e tale da soddisfare le speci-fiche richieste dell’autopilota:
Gcon(s) = KIAS· (s
Infatti, l’introduzione della coppia di zeri complessi 1/TE1,2 = -0.0526±0.238i,
che si elide con quella dei poli di lungo (ωP = ωE), e dei poli di bassa
fre-quenza 1/TE3 = 0.66 e nell’origine, i quali terminano verso gli zeri complessi
della (4.2), permette il controllo della zona di bassa frequenza stessa por-tando l’eventuale instabilizzazione, verso lo zero di altissima frequenza della (4.2), a riguardare i poli di corto periodo pi`u lontani dall’asse immaginario: ci`o consente di chiudere con guadagni sufficientemente elevati da garantire, oltre ai margini di fase e di guadagno richiesti, anche una rapida risposta del sistema, assieme naturalmente ad errore asintotico nullo.
Il segno del guadagno KIAS `e scelto positivo dall’analisi delle singolarit`a
sull’asse reale e del guadagno della (4.2): la fase critica risulta ±180◦. Con analoga metodologia si determinano i guadagni relativi a tutte le condi-zioni di volo, lasciando inalterata la struttura del controllore. Si rimanda alla Tabella 4.5 per la visione numerica dei guadagni stessi, dei margini di fase PM e di guadagno GM e del tempo di salita tR della risposta in ciclo
chiuso (tra il 10% ed il 90% del valore a regime) a seguito di ingresso unitario a gradino di IAS stessa.
La rappresentazione grafica di quanto sopra descritto, sempre relativamente al caso CV 1, `e riportata nelle seguenti Figure che descrivono il luogo delle radici, il diagramma di Bode generalizzato ed in ciclo chiuso, le risposte tem-porali nei tempi caratteristici di corto e di lungo periodo delle uscite del piano longitudinale a seguito di step unitario di IAS ed a partire dalle condizioni iniziali proprie di CV 1. Infine se ne riporta la f.d.t. in ciclo chiuso:
IAS IASref
= −15.0862 · (s − 1183) · (s
2+ 4.722s + 8.135)
(s2+ 1.379s + 1.736) · (s2 + 9.83s + 192.8) · (s2+ 31.5s + 433.5)
CV KIAS [rad·s/m] PM [deg] GM [dB] tR [s]
0 0.085 60.18 14.33 0.853 1 0.085 61.30 12.90 0.979 2 0.090 60.20 15.10 1.050 3 0.100 60.90 15.20 1.060 4 0.110 62.10 15.40 1.100 5 0.110 63.50 16.40 1.260 6 0.110 66.70 17.70 1.640
4 – Sintesi degli autopiloti
Figura 4.9: Luogo delle radici di IAS/δe: alta frequenza
4 – Sintesi degli autopiloti
4 – Sintesi degli autopiloti
Verifica sul Simulatore
Il sistema autopilota ottenuto `e stato implementato nel Simulatore Stand Alone, descritto al §3.2.1, al fine di verificarne la compatibilit`a col modello non lineare.
A tal proposito, secondo quanto suggerito in [13], il sistema di controllo `e stato modellizzato all’interno del blocco D del Simulatore.
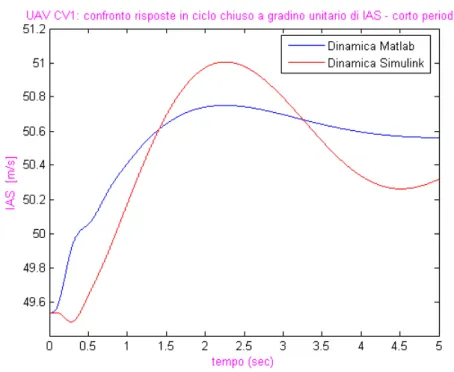
Il valore della deflessione dell’equilibratore in uscita dall’autopilota viene inviato, tramite i blocchi goto e from, all’interno del blocco B dove viene passato all’attuatore e sommato al valore della deflessione iniziale proveniente dal blocco A dei comandi; si vedano a proposito le Figure 4.15, 4.16 e 4.17. Per provare la corrispondenza tra il modello linearizzato e quello non lineare del Simulatore si riportano su uno stesso grafico le risposte temporali per entrambi i modelli, sia della IAS che dell’equilibratore stesso, al gradino unitario di velocit`a indicata ed a partire dagli stati iniziali della CV 1. Le Figure 4.18 - 4.21 ne mostrano gli andamenti.
Si noti che in questa verifica si considera anche la saturazione del comando che nel modello di Simulatore del rack viene ripetuta nel Sottosistema di controllo del volo del FMS al momento della costruzione del segnale per l’attuatore, ottenuto sommando alla variazione imposta dall’autopilota il valore congelato proveniente dal joystick, e che per regolare l’appropriato valore dei guadagni Kq e KIAS sono state utilizzate altrettante Lookuptables che hanno come
4 – Sintesi degli autopiloti
4 – Sintesi degli autopiloti
Figura 4.18: Autopilota IAS: confronto risposte della IAS nel corto periodo
4 – Sintesi degli autopiloti
Figura 4.20: Autopilota IAS: confronto risposte di δe nel corto periodo
4.2.4
Analisi e sintesi dell’autopilota della velocit`
a
ver-ticale V
zLa velocit`a di salita o di discesa lungo l’asse verticale locale ZV `e regolata,
per una data velocit`a di volo V0, dalla relazione:
Vz = V0· γ =
dh
dt (4.3)
come si rappresenta in Figura 4.22.
Figura 4.22: Velocit`a verticale Vz
Il sistema gi`a comprensivo di pitch damper (§4.2.1) e di autothrottle (§4.2.2) si chiude ora con un’ulteriore loop esterno riguardante la Vz al fine
di definirne il sistema di autopilotaggio.
La Figura 4.23 mostra il sistema completo multiloop.
4 – Sintesi degli autopiloti
La f.d.t. in ciclo aperto interessata dalla retroazione risulta, sempre per la CV 1 di riferimento, di cui si riportano i risultati anche in forma grafica:
Vz δe = 7227.4469 · (s − 36.16) · (s + 36.07) (s2+ 0.5118s + 0.0711) · (s2+ 15.28s + 221.4)· · (s + 0.4763) · (s 2 + 19.65s + 281.9) (s2+ 26.69s + 334.3) · (s2+ 19.72s + 283.5) (4.4)
Si pu`o notare, come ci si aspettava osservando la (4.3), la presenza di due zeri pressoch`e opposti 1/Th2,3 e dello zero di bassa frequenza 1/Th1 = 0.6164.
La struttura del compensatore ([12]) `e di tipo PI:
Gcon(s) = KVz · (s + 0.19)
s
L’introduzione dello zero stabile di bassa frequenza 1/TE = 0.19 arrira il polo
nell’origine introdotto per annullare l’errore asintotico per ingresso a gradino; la zona di bassa frequenza rimane nel semipiano negativo, mentre l’eventuale instabilizzazione, verso lo zero instabile di alta frequenza della (4.4), interes-sa i poli di corto periodo pi`u lontani dall’asse immaginario: ci`o permette di scegliere guadagni di chiusura sufficientemente elevati da garantire, oltre ai margini di fase e di guadagno richiesti, anche una rapida risposta del sistema, assieme naturalmente ad errore asintotico nullo.
Il segno del guadagno di chiusura KVz si prende negativo dopo aver osservato
la disposizione delle singolarit`a sul’asse reale ed il segno del guadagno della (4.4): si determina cos`ı una fase critica di 0◦.
I guadagni relativi ad ogni condizione di volo si determinano tutti con la stes-sa metodologia e lasciando inalterata la struttura del controllore; in Tabella 4.6 sono numericamente elencati i guadagni stessi, i margini di fase PM e di guadagno GM ed il tempo di salita tR della risposta in ciclo chiuso (tra il
10% ed il 90% del valore a regime) a seguito di ingresso unitario a gradino di Vz stessa.
La rappresentazione grafica di quanto sopra descritto, sempre relativamente al caso CV 1, `e riportata nelle seguenti Figure che descrivono il luogo delle radici, il diagramma di Bode generalizzato ed in ciclo chiuso, le risposte tem-porali nei tempi caratteristici di corto e di lungo periodo delle uscite del
piano longitudinale a seguito di step unitario di Vz ed a partire dalle
condi-zioni iniziali proprie di CV 1.
Infine se ne riporta la f.d.t. in ciclo chiuso: Vz Vzref = −144.5489 · (s + 36.07) · (s − 36.16) (s + 4.258) · (s + 0.5197) · (s + 0.1874) · (s2+ 11.94s + 106.8)· · (s + 0.4763) · (s + 0.19) · (s 2+ 19.65s + 281.9) (s2 + 25.61s + 385.4) · (s2+ 19.69s + 281.9) CV KVz [rad·s/m] PM [deg] GM [dB] tR [s] 0 -0.017 63.00 8.43 0.272 1 -0.020 64.20 9.92 0.362 2 -0.025 63.70 10.34 0.404 3 -0.028 64.60 11.20 0.473 4 -0.035 63.80 11.60 0.510 5 -0.049 61.00 9.80 0.465 6 -0.066 61.20 9.53 0.534
4 – Sintesi degli autopiloti
Figura 4.24: Luogo delle radici di Vz/δe: alta frequenza
4 – Sintesi degli autopiloti
4 – Sintesi degli autopiloti
Verifica sul Simulatore
Il sistema autopilota ottenuto `e stato quindi implementato nel Simulatore Stand Alone, descritto al §3.2.1, al fine di verificarne la compatibilit`a col modello non lineare.
A tal proposito, secondo quanto suggerito in [13], il sistema di controllo `e stato modellizzato all’interno del blocco D del Simulatore.
I segnali della deflessione dell’equilibratore e quello della variazione di ma-netta in uscita dall’autopilota vengono inviati, tramite i blocchi goto e from, all’interno del blocco B dove sono passati ai rispettivi attuatori e sommati ai valori iniziali provenienti dal blocco A dei comandi: si vedano a proposito le Figure 4.30, 4.31 e 4.32.
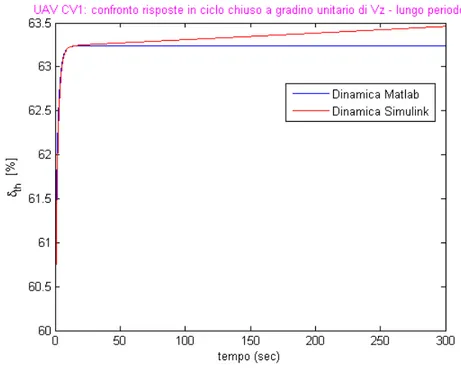
Per testare la corrispondenza tra il modello linearizzato e quello non lineare del Simulatore si riportano su uno stesso grafico le risposte temporali per entrambi i modelli, sia della Vz che dei comandi stessi, al gradino unitario di
velocit`a verticale ed a partire dagli stati iniziali della CV 1. Le Figure 4.33 - 4.38 ne mostrano gli andamenti.
Come per l’autopilota della IAS, si ricorda che in questa verifica si conside-ra anche la satuconside-razione dei comandi che nel modello di Simulatore del conside-rack viene ripetuta nel Sottosistema di controllo del volo del FMS al momento del-la costruzione dei segnali per gli attuatori, ottenuti sommando alle variazioni imposte dall’autopilota i valori congelati provenienti dal joystick, e che per regolare l’appropriato valore dei guadagni Kq, Ku e KVz sono state utilizzate
4 – Sintesi degli autopiloti
4 – Sintesi degli autopiloti
Figura 4.33: Autopilota Vz: confronto risposte della Vz nel corto periodo
4 – Sintesi degli autopiloti
Figura 4.35: Autopilota Vz: confronto risposte di δe nel corto periodo
Figura 4.37: Autopilota Vz: confronto risposte di δth nel corto periodo
4 – Sintesi degli autopiloti
4.2.5
Analisi e sintesi dell’autopilota della quota H
Il sistema qui descritto serve per il raggiungimento e successivo mantenimento di una desiderata quota di volo H e pu`o essere utilizzato ad esempio durante una fase di crociera di tipo step cruise.
Il comando utilizzato per il controllo `e l’equilibratore ed il sistema si chiude come in Figura 4.39:
Figura 4.39: Schema dell’autopilota della quota H
Anche per tale autopilota si utilizzano sia il pitch damper che l’autothrottle per i motivi gi`a spiegati nel §4.2.2. Quindi la f.d.t. in ciclo aperto interessata dal feedback pi`u esterno risulta, sempre per la CV 1 di studio:
H δe = 7227.4469 · (s − 36.16) · (s + 36.07) s · (s2+ 0.5118s + 0.0711) · (s + 0.4763) · (s 2+ 19.65s + 281.9) (s2+ 26.69s + 334.3) · (s2+ 15.28s + 221.4) · (s2+ 19.72s + 283.5) (4.5)
Si nota, rispetto alla (4.4), la presenza in pi`u del polo nell’origine che annulla l’errore asintotico per ingresso a gradino; di conseguenza, la struttura del controllore `e stata scelta di tipo PD, con un polo di altissima frequenza per rendere propria la f.d.t:
Gcon(s) = KH · 50 · (s + 0.45) s + 50
CV KH [rad/m] PM [deg] GM [dB] tR [s] 0 -0.010 61.10 12.40 0.557 1 -0.010 60.70 15.20 0.809 2 -0.011 60.10 16.50 0.980 3 -0.012 60.10 17.60 1.170 4 -0.018 60.30 15.90 1.010 5 -0.026 60.60 14.40 0.936 6 -0.041 60.80 12.70 0.848
Tabella 4.7: Caratteristiche dell’autopilota della quota H
Lo zero del controllore 1/TE = 0.45 attira uno dei due poli di lungo periodo
verso l’asse reale; l’eventuale instabilit`a, verso lo zero instabile di alta fre-quenza della (4.5), `e ritardata e va ad interessare i poli di corto.
Dall’osservazione delle singolarit`a sull’asse reale e del guadagno della (4.5) si sceglie di chiudere il sistema con guadagni negativi, determinando una fase critica di 0◦.
I risultati ottenuti per ogni condizione di volo sono riepilogati in Tabella 4.7. Il luogo delle radici, il diagramma di Bode generalizzato ed in ciclo chiuso, le risposte temporali nei tempi caratteristici di corto e di lungo periodo delle uscite del piano longitudinale a seguito di step unitario di quota H ed a par-tire dalle condizioni iniziali proprie di CV 1 sono rappresentati nelle Figure che seguono.
Infine si scrive la f.d.t. in ciclo chiuso: H Href = −3613.7235 · (s − 36.16) · (s + 36.07) · (s + 0.4763) (s + 50.03) · (s + 0.3833) · (s2+ 1.643s + 0.9197) · · (s + 0.45) · (s 2+ 19.65s + 281.9) (s2+ 16.25s + 166.5) · (s2 + 19.73s + 282) · (s2+ 24.17s + 344)
4 – Sintesi degli autopiloti
Figura 4.40: Luogo delle radici di H/δe: alta frequenza
4 – Sintesi degli autopiloti
4 – Sintesi degli autopiloti
Verifica sul Simulatore
Il sistema autopilota ottenuto `e stato successivamente implementato nel Si-mulatore Stand Alone, descritto al §3.2.1, al fine di verificarne la compatibi-lit`a col modello non lineare.
Come per gli altri autopiloti gi`a analizzati, il sistema di controllo `e stato modellizzato all’interno del Blocco D del Simulatore.
I valori delle variazioni di equilibratore e di manetta in uscita dall’autopilota vengono portati, tramite i blocchi goto e from, all’interno del Blocco B dove sono passati agli attuatori e sommati ai valori iniziali provenienti dal Blocco A dei comandi; si vedano a proposito le Figure 4.46, 4.47 e 4.30.
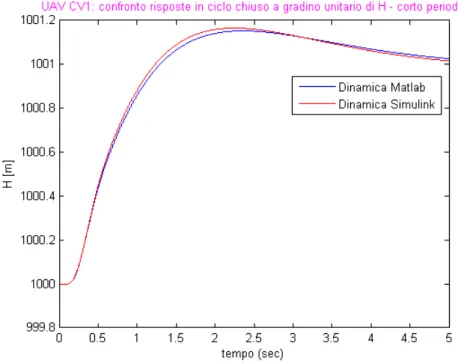
Per provare la corrispondenza tra il modello linearizzato e quello non lineare del Simulatore si riportano su uno stesso grafico le risposte temporali per entrambi i modelli, sia della quota H che dei comandi, al gradino unitario di quota ed a partire dagli stati iniziali della CV 1.
Le Figure 4.48 - 4.53 ne mostrano gli andamenti.
Si noti che in questa verifica si considerano anche le saturazioni dei comandi stessi che nel modello di Simulatore del rack vengono ripetute nel Sottosis-tema di controllo del volo del FMS al momento della costruzione dei segnali per gli attuatori, ottenuti sommando alle variazioni imposte dall’autopilota i valori congelati provenienti dal joystick, e che per regolare l’appropriato va-lore dei guadagni Kq, Ku e KH sono state utilizzate altrettante Lookuptables
4 – Sintesi degli autopiloti
Figura 4.48: Autopilota H : confronto risposte della H nel corto periodo
Figura 4.50: Autopilota H : confronto risposte di δe nel corto periodo
4 – Sintesi degli autopiloti
Figura 4.52: Autopilota H : confronto risposte di δth nel corto periodo
4.3
Autopiloti del piano latero-direzionale
La dinamica del velivolo sul piano latero-direzionale risulta caratterizzata dai tre seguenti modi:
• Modo di rollio, caratterizzato da variazioni non oscillatorie dell’angolo φ e della velocit`a angolare p.
Il contributo dominante `e collegato alla variabile φ e pu`o pertanto as-similarsi ad un moto di rotazione attorno all’asse XB del velivolo. La
dinamica `e contraddistinta da un polo reale di elevato valore 1/TR.
• Modo spirale, caratterizzato da lente variazioni di β, r e φ.
Pu`o essere assimilato quindi ad una virata lentamente variabile. La dinamica `e contraddistinta da un polo reale di valore molto piccolo 1/TS.
• Modo di dutch roll, caratterizzato principalmente da variazioni dell’an-golo β e della velocit`a angolare r, con ulteriore contributo dell’angolo φ. Si tratta perci`o di un moto oscillatorio a 3 gradi di libert`a, durante il quale l’aereo pu`o derapare lungo YB, ruotare attorno a ZB e oscillare
secondo XB. La dinamica `e rappresentata in generale da una coppia
di poli complessi coniugati con pulsazione ωDR relativamente elevata e
smorzamento ξSP dipendente dalle condizioni di volo.
Per comprendere meglio le scelte effettuate per gli autopiloti e per avere una migliore visione della dinamica nel suo insieme, di seguito vengono evidenziati i valori dei poli che caratterizzano la dinamica latero-direzionale in ciclo aperto del velivolo:
Rollio Spirale Dutch Roll
CV −1/TR [1/s] −1/TS [1/s] ωDR [rad/s] ξDR 0 -21.1691 0.0071 6.7452 0.0761 1 -18.3575 0.0081 5.8623 0.0751 2 -16.2057 0.0093 5.1422 0.0753 3 -14.6934 0.0104 4.6331 0.0755 4 -13.1168 0.0117 4.1154 0.0751 5 -11.4751 0.0134 3.5899 0.0739 6 -9.6778 0.0157 3.0447 0.0703
4 – Sintesi degli autopiloti
4.3.1
Yaw Damper
I sistemi di controllo oggetti del presente lavoro di tesi si realizzano tramite sistemi multiloop costituiti da un SAS (Stability Augmentation System) e dall’autopilota propriamente detto.
In particolare, relativamente al piano latero-direzionale, lo schema generale seguito `e quello di sintetizzare un sistema di aumento della stabilit`a SAS detto yaw damper avente lo scopo di incrementare lo smorzamento dei poli di dutch roll al fine di migliorare le qualit`a di volo.
Il nome del dispositivo deriva dal fatto che viene appunto aumentato lo smor-zamento in yaw, cio`e in imbardata, del velivolo.
Poich`e la pulsazione di dutch roll e quindi la rigidezza in imbardata ad es-sa correlata (ωDR =
q
Nβ0 + Yv · Nr0) `e gi`a sufficientemente elevata in ciclo
aperto e non viene pregiudicata dal SAS sopra descritto, si `e ritenuto non necessario operare una ulteriore retroazione al fine di incrementarla oppure ripristinarla: la virata risulta coordinata.
Tale sistema costituisce quindi il loop interno del sistema M.I.M.O. (Multi Input Multi Output ) e le sue caratteristiche rimangono le stesse per ogni au-topilota.
I valori desiderati del coefficiente di smorzamento di dutch roll ξDR possono
essere ottenuti misurando la variazione della velocit`a angolare di imbardata r attraverso un giroscopio e portando in retroazione il segnale corrispondente, il quale viene filtrato alle alte frequenze dal blocco denominato wash out, amplificato con il guadagno Kr e sommato con l’ingresso diretto da parte del
pilota, ottenendo cos`ı l’angolo di deflessione di timone δr richiesto in ingresso
al sistema comprensivo di attuatore, come mostrato in Figura 4.54. L’ipotesi assunta, a carattere del tutto generale, `e che gli strumenti di misurazione delle varie grandezze possano essere equiparati a sensori ideali cio`e con f.d.t. unitarie mentre quella del filtro di wash out `e stata presa uguale a s/(s+0.4). La procedura seguita `e quindi quella di ricercare, per mezzo degli strumenti definiti al §4.1, i valori dei guadagni Kr che rendano massimi i valori degli
smorzamenti ξDR per ogni condizione di volo CV.
I risultati ottenuti, in termini di guadagni e di poli di rollio, spirale e di dutch roll modificati, sono riportati in Tabella 4.9.
Figura 4.54: Schema dello Yaw Damper
Rollio Spirale Dutch Roll
CV Kr [s] −1/TR [1/s] −1/TS [1/s] ωDR [rad/s] ξDR 0 -0.282 -20.3546 0.0055 9.9712 0.9932 1 -0.343 -17.2770 0.0061 8.5240 0.9911 2 -0.411 -14.9851 0.0066 7.0124 0.9928 3 -0.471 -13.5277 0.0071 5.8621 0.9907 4 -0.547 -12.1232 0.0077 4.7291 0.9921 5 -0.642 -10.7309 0.0084 3.6195 0.9921 6 -0.762 -9.1994 0.0093 3.0029 0.9960
Tabella 4.9: Guadagni di chiusura dello Yaw Damper
Si consideri, ad esempio, la tipica CV 1: la funzione di trasferimento r/δr in
ciclo aperto comprensiva di attuatore `e espressa da r δr = −9030.476 · (s + 18.82) · (s 2+ 0.008251s + 0.7263) (s + 18.36) · (s − 0.008091) · (s2+ 0.8805s + 34.37)· · 1 (s2+ 31.36s + 490.2)
dove si notano al numeratore uno zero 1/Tr1 = 18.82 di alta frequenza ed una
coppia di zeri complessi stabile 1/Tr2,3 = -0.00413±0.0852i di bassa frequenza;
al denominatore, oltre i poli caratteristici di rollio, spirale e dutch roll, quelli propri dell’attuatore del comando di timone, la cui f.d.t. ([5]) risulta:
Attδr(s) =
0.95345
0.00204s2+ 0.06398s + 1 =
467.38
s2+ 31.36s + 490.2 (4.6)
Le Figure 4.55 e 4.56 mostrano il luogo delle radici relativo alla funzione di trasferimento sopra descritta in modo da evidenziare, tramite marcatura dei
4 – Sintesi degli autopiloti
poli in ciclo chiuso, la chiusura del sistema in corrispondenza del guadagno Kr definito in Tabella 4.9. Infine, in ciclo chiuso si ottiene:
r δr cc = −9030.476 · (s + 0.4) · (s + 18.82) · (s 2+ 0.008251s + 0.7263) (s + 17.277) · (s + 0.6136) · (s − 0.0061) · (s2+ 16.9s + 72.66)· · 1 (s2+ 16.21s + 214.7)
Figura 4.55: Luogo delle radici di r/δr con attuatore: alta frequenza
4.3.2
Analisi e sintesi dell’autopilota dell’angolo di prua
Ψ (Heading )
L’angolo di prua ψ (heading) `e l’angolo che l’asse longitudinale del velivolo XB forma con la direzione del Nord XV, come mostrato nella Figura 4.57
dove si rappresenta anche l’angolo di derapata β (sideslip) tra la direzione dell’asse corpo XB e quella del vettore velocit`a V.
Il requisito fondamentale per controllare la prua del velivolo `e quello di
Figura 4.57: Angoli di prua ψ e di derapata β
poter virare cio`e indurre la nascita di un angolo di rollio φ non nullo con conseguente componente della portanza nel piano orizzontale e curvatura della traiettoria.
Il comando principale risulta quindi l’alettone la cui f.d.t. di attuazione `e identica alla (4.6).
Il sistema modificato dalla retroazione descritta al §4.3.1 viene ora ad essere chiuso da un’ulteriore loop esterno riguardante la ψ al fine di definirne il sistema di controllo.
4 – Sintesi degli autopiloti
La Figura 4.58 mostra il sistema completo multiloop.
Figura 4.58: Schema dell’autopilota della ψ
La f.d.t. interessata dalla retroazione risulta, sempre per la CV 1: ψ δa = 5379.6769 · (s − 22.11) · (s − 2.586) s · (s + 17.277) · (s + 0.6136) · (s − 0.0061)· · (s + 0.4) (s2+ 16.9s + 72.66) · (s2+ 16.21s + 214.7) (4.7)
Il controllore `e di tipo PD in quanto `e gi`a presente in ciclo aperto un polo nell’origine che annulla l’errore asintotico per ingresso a gradino.
Gcon(s) = Kψ· 100 · (s + 0.29) (s + 100)
Lo zero introdotto 1/TE = 0.29 `e di frequenza relativamente bassa e stabile
e perci`o alza subito il diagramma della fase consentendo una buona rapidit`a di risposta del sistema ai guadagni di chiusura scelti per soddisfare i requisiti sui margini di stabilit`a; il polo di alta frequenza serve per rendere propria la f.d.t.
Il segno del guadagno Kψ `e scelto positivo dalla osservazione delle
singola-rit`a sull’asse reale e del guadagno della (4.7) determinando una fase critica di ±180◦.
Il polo spirale risulta stabilizzato dalla retroazione; l’eventuale instabilit`a va a riguardare, in maniera asintotica, i poli dell’attuatore del timone, gi`a
modificati dallo Yaw Damper ed i poli di dutch roll attratti dagli zeri reali instabili della (4.7).
Con analoga metodologia si determinano i guadagni relativi a tutte le condi-zioni di volo, lasciando inalterata la struttura del controllore; si rimanda alla Tabella 4.10 per la visione numerica dei guadagni stessi, dei margini di fase PM e di guadagno GM e del tempo di salita tR della risposta in ciclo chiuso
(tra il 10% ed il 90% del valore a regime) a seguito di ingresso unitario a gradino di ψ stesso.
La rappresentazione grafica di quanto sopra descritto, sempre relativamente al caso CV 1, `e riportata nelle seguenti Figure che descrivono il luogo delle radici, il diagramma di Bode generalizzato ed in ciclo chiuso, le risposte temporali nei tempi brevi e lunghi delle uscite del piano laterodirezionale a seguito di step unitario di ψ ed a partire dalle condizioni iniziali proprie di CV 1. Infine se ne riporta la f.d.t. in ciclo chiuso:
ψ ψref = 123194.6 · (s − 22.11) · (s − 2.586) · (s + 2.522) (s + 99.75) · (s + 28.31) · (s + 0.9548) · (s2+ 0.4644s + 0.1026)· · (s + 0.4) · (s + 0.29) (s2+ 3.889s + 19.45) · (s2+ 17.63s + 383) CV Kψ PM [deg] GM [dB] tR [s] 0 0.233 61.60 6.02 1.49 1 0.242 62.00 6.04 1.45 2 0.252 62.20 6.10 0.816 3 0.260 61.80 6.01 0.693 4 0.260 61.80 6.07 0.719 5 0.254 62.30 6.09 0.788 6 0.255 62.20 6.05 0.782
4 – Sintesi degli autopiloti
Figura 4.59: Luogo delle radici di ψ/δa: alta frequenza
4 – Sintesi degli autopiloti
4 – Sintesi degli autopiloti
Verifica sul Simulatore
Anche l’autopilota ottenuto `e stato implementato come gli altri nel Simula-tore Stand Alone, descritto al §3.2.1, al fine di verificarne la compatibilit`a col modello non lineare.
Secondo quanto suggerito in [13], il sistema di controllo `e stato modellizzato all’interno del blocco D del Simulatore.
Il valore della deflessioni dell’alettone e del timone in uscita dall’autopilota vengono trasmessi, tramite i blocchi goto e from, al Blocco B dove sono pas-sati agli attuatori e sommati ai propri valori iniziali provenienti dal Blocco A dei comandi; si vedano a proposito le Figure 4.65, 4.66 e 4.67.
Per provare la corrispondenza tra il modello linearizzato e quello non lineare del Simulatore si riportano su uno stesso grafico le risposte temporali per entrambi i modelli, sia della ψ che dell’alettone stesso, al gradino unitario di ψ ed a partire dagli stati iniziali della CV 1.
Le Figure 4.68 - 4.71 ne mostrano gli andamenti.
In questa verifica si considera anche la saturazione dei comandi che nel mo-dello di Simulatore del rack vengono ripetute nel Sottosistema di controllo del volo del FMS al momento della costruzione dei segnali per gli attuatori, ottenuti sommando alle variazioni imposte dall’autopilota i valori congelati provenienti dal joystick, e che per regolare l’appropriato valore dei guadagni Kr e Kψ sono state utilizzate altrettante Lookuptables che hanno come input
4 – Sintesi degli autopiloti
4 – Sintesi degli autopiloti
Figura 4.68: Autopilota ψ: confronto risposte della ψ nei tempi brevi
4 – Sintesi degli autopiloti
Figura 4.70: Autopilota ψ: confronto risposte di δa nei tempi brevi
4.3.3
Analisi e sintesi dell’autopilota dell’angolo di
rot-ta η (Course)
L’angolo di rotta η `e l’angolo formato dalla direzione del Nord XV e dalla
di-rezione del vettore velocit`a V, come mostrato in Figura 4.72. Analiticamente `
e dato dalla somma dell’angolo di prua ψ e dell’angolo di derapata β: η = ψ + β
Il sistema di partenza `e quello gi`a comprensivo di Yaw Damper.
Figura 4.72: Angolo di rotta η
La correzione della rotta avviene tramite il comando di timone che quindi risulta l’unico interessato per tale autopilota. Lo schema completo multiloop `
4 – Sintesi degli autopiloti
Figura 4.73: Schema dell’autopilota della η con δr
La f.d.t. interessata dalla retroazione risulta, sempre per la CV 1: η δr = 43.8957 · (s − 5.677) · (s + 17.59) s · (s + 17.277) · (s + 0.6136) · (s − 0.0061)· · (s + 0.4) · (s 2+ 6.416s + 28.17) s2+ 16.9s + 72.66) · (s2+ 16.21s + 214.7) (4.8)
Il controllore `e di tipo PD in quanto `e gi`a presente in ciclo aperto un polo nell’origine che annulla l’errore asintotico per ingresso a gradino.
Gcon(s) = Kη/δr · 100 · (s + 0.38)
(s + 100)
Lo zero introdotto 1/TE = 0.38 `e di relativamente bassa frequenza e stabile
e perci`o alza subito il diagramma della fase consentendo una buona rapidit`a di risposta del sistema ai guadagni di chiusura scelti per soddisfare i requi-siti sui margini di stabilit`a e contenere le variazioni iniziali del comando di timone; il polo di alta frequenza serve per rendere propria la f.d.t.
Il segno del guadagno Kη/δr `e scelto negativo dalla osservazione delle
singo-larit`a sull’asse reale e del guadagno della (4.8) determinando una fase critica di 0◦.
Il polo spirale risulta stabilizzato dalla retroazione; l’eventuale instabilit`a va a riguardare i soli poli dell’attuatore del timone attratti sull’asse reale dallo zero reale instabile della (4.8).
Con analoga metodologia si determinano i guadagni relativi a tutte le condi-zioni di volo, lasciando inalterata la struttura del controllore; si rimanda alla Tabella 4.11 per la visione numerica dei guadagni stessi, dei margini di fase PM e di guadagno GM e del tempo di salita tR della risposta in ciclo chiuso
(tra il 10% ed il 90% del valore a regime) a seguito di ingresso unitario a gradino di η stesso.
Quanto sopra descritto, sempre relativamente al caso CV 1, si rappresenta nelle seguenti Figure che descrivono il luogo delle radici, il diagramma di Bode generalizzato ed in ciclo chiuso, le risposte temporali nei tempi brevi e lunghi delle uscite del piano laterodirezionale a seguito di step unitario di η ed a partire dalle condizioni iniziali proprie di CV 1. Infine se ne riporta la f.d.t. in ciclo chiuso: η ηref = −5925.9237 · (s − 5.677) · (s + 17.59) · (s + 0.38) (s + 99.17) · (s + 4.516) · (s + 0.8312) · (s2 + 0.4955s + 0.1382)· · (s + 0.4) · (s 2+ 6.416s + 28.17) (s2+ 35.2s + 311.6) · (s2+ 10.78s + 157.9) CV Kη/δr PM [deg] GM [dB] tR [s] 0 -1.35 60.30 12.30 1.92 1 -1.35 60.20 14.00 1.90 2 -1.40 60.90 15.50 1.81 3 -1.40 61.10 16.80 1.77 4 -1.45 61.70 18.00 1.66 5 -1.45 62.20 19.50 1.58 6 -1.55 62.90 15.30 1.38
4 – Sintesi degli autopiloti
Figura 4.74: Luogo delle radici di η/δr: alta frequenza
4 – Sintesi degli autopiloti
4 – Sintesi degli autopiloti
Verifica sul Simulatore
Come per gli altri autopiloti anche questo si implementa nel Simulatore Stand Alone, descritto al §3.2.1, al fine di verificarne la compatibilit`a col modello non lineare.
Secondo quanto suggerito in [13], il sistema di controllo `e stato modellizzato all’interno del blocco D del Simulatore.
Il valore della deflessione del timone in uscita dall’autopilota viene inviato, tramite i blocchi goto e from, al Blocco B dove `e passato all’attuatore e sommato al propro valore iniziale proveniente dal Blocco A dei comandi; si vedano a proposito le Figure 4.80, 4.81 e 4.82.
Per provare la corrispondenza tra il modello linearizzato e quello non lineare del Simulatore si riportano su uno stesso grafico le risposte temporali per entrambi i modelli, sia della η che del timone stesso, al gradino unitario di η ed a partire dagli stati iniziali della CV 1.
Le Figure 4.83 - 4.86 ne mostrano gli andamenti.
Si noti che in questa verifica si considera anche la saturazione del comando che nel modello di Simulatore del rack viene ripetuta nel Sottosistema di controllo del volo del FMS al momento della costruzione del segnale per l’attuatore, ottenuto sommando alla variazione imposta dall’autopilota il valore congelato proveniente dal joystick, e che per regolare l’appropriato valore dei guadagni Kre Kη/δr sono state utilizzate come per gli altri casi altrettante Lookuptables
4 – Sintesi degli autopiloti
Figura 4.83: Autopilota η: confronto risposte della η nei tempi brevi
4 – Sintesi degli autopiloti
Figura 4.85: Autopilota η: confronto risposte di δr nei tempi brevi
4.3.4
Analisi e sintesi dell’autopilota del Circling
Tra le caratteristiche dei velivoli della classe UAV assume particolare impor-tanza quella di poter monitorare una certa porzione di territorio utilizzando particolari tipologie di manovre: ad esempio il circling, ovvero la capacit`a di effettuare una traiettoria circolare sul piano orizzontale attorno ad un punto, ottenuta tramite inserimento, nell’apposito display dell’autopilota, del valore del raggio di curvatura desiderato.
In Figura 4.87 `e disegnata una manovra del tipo suddetto.
Figura 4.87: Manovra di circling
La traiettoria appartiene al piano orizzontale ad esempio quando si compie una virata in volo livellato: tale manovra viene generalmente effettuata in-clinando il velivolo nel piano orizzontale di un angolo φ come mostrato in Figura 4.88.
A causa di tale inclinazione si crea una componente di portanza giacente sul piano orizzontale che provoca la curvatura della traiettoria.
Il raggio di curvatura R si ricava dalla condizione di equilibrio tra la suddet-ta forza e quella centrifuga, nell’ipotesi che sia nulla la risulsuddet-tante delle forze aerodinamiche agenti secondo l’asse laterale YB del velivolo.
4 – Sintesi degli autopiloti
La virata effettuata in tali condizioni ed inoltre a velocit`a e quota costan-ti `e detta corretta e per essa `e possibile valutarne il raggio di curvatura direttamente dalla relazione:
R = V
2
g · tan φ (4.9)
Figura 4.88: Manovra di virata
Impostato sulla strumentazione il valore desiderato del raggio R, il controllo che si esegue `e sull’angolo di inclinazione φ: esso deve inseguire il riferimento
φref = arctan
V2
g · R
che non `e costante come per tutti gli autopiloti fin qui considerati ma varia, come ovvio, con la velocit`a di volo V.
Il comando interessato `e l’alettone.
Il sistema di partenza `e quello gi`a comprensivo di Yaw Damper. Lo schema completo multiloop `e di seguito riportato.
Figura 4.89: Schema dell’autopilota del circling
La f.d.t. interessata dalla retroazione risulta, sempre per la CV 1 di studio: φ δa = 138405.8368 · (s + 9.555) · (s + 5.996) · (s + 0.436) (s + 17.277) · (s + 0.6136) · (s − 0.0061) · (s2+ 16.21s + 214.7)· · (s 2 + 16.91s + 234.3) (s2+ 16.9s + 72.66) · (s2+ 31.36s + 490.2) (4.10)
Il controllore `e di tipo PI in quanto non `e presente in ciclo aperto un polo nell’origine che annulli l’errore asintotico per ingresso a gradino.
Gcon(s) = Kφ· (s + 0.23) s
Lo zero introdotto 1/TE = 0.23 `e di relativamente bassa frequenza e stabile
e perci`o alza subito il diagramma della fase consentendo una buona rapidit`a di risposta del sistema ai guadagni di chiusura scelti per soddisfare i requisiti sui margini di stabilit`a.
Il segno del guadagno Kφ`e scelto positivo dalla osservazione delle singolarit`a
sull’asse reale e del guadagno della (4.10) determinando una fase critica di ±180◦.
Il polo spirale risulta stabilizzato dalla retroazione; l’eventuale instabilit`a va a riguardare i poli di dutch roll in maniera asintotica.
I guadagni relativi a tutte le condizioni di volo sono ricavati con la stessa me-todologia e lasciando inalterata la struttura del controllore; la Tabella 4.12
4 – Sintesi degli autopiloti
riporta numericamente i guadagni stessi, i margini di fase PM e di guadagno GM ed il tempo di salita tR della risposta in ciclo chiuso (tra il 10% ed il
90% del valore a regime) a seguito di ingresso unitario a gradino di φ stesso. Quanto sopra descritto, sempre relativamente al caso CV 1, si rappresenta graficamente nelle seguenti Figure che descrivono il luogo delle radici, il dia-gramma di Bode generalizzato ed in ciclo chiuso, le risposte temporali nei tempi brevi e lunghi delle uscite del piano laterodirezionale a seguito di step unitario di φ ed a partire dalle condizioni iniziali proprie di CV 1.
Infine se ne riporta la f.d.t. in ciclo chiuso: φ φref = 45673.9262 · (s + 9.555) · (s + 5.996) · (s + 0.436) (s + 9.916) · (s + 4.602) · (s + 0.3913) · (s + 0.259)· · (s + 0.23) · (s 2+ 16.91s + 234.3) (s2+ 9.539s + 99.34) · (s2+ 17.89s + 225.7) CV Kφ PM [deg] GM [dB] tR [s] 0 0.332 61.80 10.00 0.206 1 0.330 61.00 10.20 0.252 2 0.345 61.70 10.90 0.241 3 0.350 62.90 11.70 0.272 4 0.380 61.70 12.10 0.288 5 0.405 61.20 12.80 0.319 6 0.420 61.30 13.90 0.393
Figura 4.90: Luogo delle radici di φ/δa: alta frequenza
4 – Sintesi degli autopiloti
4 – Sintesi degli autopiloti
4 – Sintesi degli autopiloti
Verifica sul Simulatore
Nella implementazione dell’autopilota nel Blocco D del Simulatore Stand Alone, secondo quanto proposto in [13], si nota in particolare la costruzione del segnale di riferimento φref in funzione della velocit`a V ed in
corrispon-denza di un desiderato raggio R e la ricostruzione in uscita del raggio stesso nella variabile denominata circling .
Il valore della deflessioni dell’alettone e del timone in uscita dall’autopilota vengono trasmessi, tramite i blocchi goto e from, al Blocco B dove sono pas-sati agli attuatori e sommati ai propri valori iniziali provenienti dal Blocco A dei comandi; si vedano a proposito le Figure 4.96, 4.97 e 4.67.
Poich`e la determinazione nel modello linearizzato delle risposte temporali ad un ingresso variabile in funzione di un altro parametro di volo non `e pos-sibile, si riportano solamente quelle del modello non lineare del Simulatore a seguito di ingresso a gradino del raggio del circling pari a 1000 m, circa uguale a quello che permette, alla velocit`a iniziale della CV 1, un giro com-pleto nel tempo standard di due minuti; in particolare si rappresentano il raggio di curvatura R, l’angolo φ ed il comando di alettone, nei tempi brevi e nei tempi lunghi, ed a partire dagli stati iniziali della CV 1.
Le Figure che seguono ne mostrano gli andamenti.
In questa verifica si considera anche la saturazione dei comandi che nel mo-dello di Simulatore del rack vengono ripetute nel Sottosistema di controllo del volo del FMS al momento della costruzione dei segnali per gli attuatori, ottenuti sommando alle variazioni imposte dall’autopilota i valori congelati provenienti dal joystick; per regolare l’appropriato valore dei guadagni Kr e
Kφ sono state utilizzate altrettante Lookuptables che hanno come input la
4 – Sintesi degli autopiloti
Figura 4.98: Autopilota φ: risposta del raggio del circling nei tempi brevi
Figura 4.99: Autopilota φ: risposta del raggio del circling nei tempi lunghi
Si noti che partendo da una traiettoria appartenente al piano verticale con φ nullo il valore del raggio di curvatura iniziale `e teoricamente infinito secondo la (4.9).
4 – Sintesi degli autopiloti
Figura 4.100: Autopilota φ: risposta di φ nei tempi brevi
Figura 4.102: Autopilota φ: risposta di δa nei tempi brevi
4 – Sintesi degli autopiloti
Tale manovra come detto implica la rotazione della portanza con conse-guente perdita di quota come mostrato in Figura 4.104.
Figura 4.104: Autopilota del circling: quota
Se non viene in alcun modo utilizzato il comando di equilibratore non `e possi-bile recuperare la perdita di portanza dovuta alla inclinazione φ del velivolo; dunque la traiettoria che ne consegue risulta un moto elicoidale attorno al centro di curvatura, come schematizzato in Figura 4.105.
Figura 4.105: Autopilota del circling: traiettoria elicoidale
Inoltre come si vede in Figura 4.88 se si aumenta il φ richiesto a seguito di una virata piu stretta, cio`e con raggio R minore, l’aumento cui deve andare soggetta la portanza L per riuscire a dare una componente verticale uguale e contraria al peso W cresce rapidamente in modo proporzionale al coseno di φ stesso.
Perci`o in tali situazioni, per mantenere la quota si deve far aumentare la por-tanza o tramite un aumento di incidenza ottenuto tirando la barra, o con un ripristino a zero dell’angolo di pendenza della traiettoria tramite un aumento di potenza.
Oppure si pu`o agire simultaneamente sull’equilibratore e sulla manetta. Poich`e una delle richieste principali dei velivoli UAV `e quella di poter sor-volare specifiche zone di territorio per lungo tempo senza perdere quota, si prova a risolvere il problema suddetto simulando in ciclo chiuso l’inserimento contemporaneo di due diversi autopiloti: quello appunto del circling agente sul piano laterodirezionale e quello della velocit`a verticale impostando il va-lore della Vz di riferimento a zero, il quale lavora sul piano longitudinale
del velivolo. Quest’ultimo autopilota infatti interviene aumentando
l’inci-Figura 4.106: Monitoraggio del territorio
denza col comando di equilibratore se l’inclinazione dell’ala non `e eccessiva, incrementando la spinta se l’intervento del solo equilibratore non bastasse, a seguito di richiesta di virata stretta, e fosse necessario un aumento di inci-denza tale da far diminuire troppo la velocit`a, come spiegato nel §4.2.2. Nelle Figure seguenti si mostrano le risposte temporali del sistema per le va-riabili dei comandi, della quota, della Vz, del raggio R e dell’angolo φ di bank
dopo il doppio inserimento dell’autopilota del circling con valore di inizia-lizzazione come nel caso precedente (R = 1000 m) e di quello della velocit`a verticale Vz impostato a zero, partendo dalle condizioni di trim proprie della
4 – Sintesi degli autopiloti
Figura 4.107: Autopilota circling e Vz: risposta del raggio nei tempi lunghi
Figura 4.108: Autopilota circling e Vz: risposta di H nei tempi lunghi (H0 =
Figura 4.109: Autopilota circling e Vz: risposta della Vz nei tempi lunghi
4 – Sintesi degli autopiloti
Figura 4.111: Autopilota circling e Vz: risposta di δa nei tempi lunghi
4.3.5
Analisi e sintesi dell’autopilota di navigazione
verso un WP (WayPoint )
La navigazione radiogoniometrica ([14]), cio`e l’insieme dei sistemi e delle tec-niche di impiego dei radiogoniometri per la guida della navigazione aerea `e resa possibile dal fatto che le onde radio si propagano dal punto di emissione in tutte le direzioni e in linea retta.
Grazie a ci`o, conoscendo la posizione del punto di emissione e la rotta seguita dalle onde radio per giungere a un aereo in volo, o viceversa, si pu`o determi-nare la posizione dell’aereo e lo si pu`o guidare durante la navigazione. Gli angoli che le traiettorie rettilinee di propagazione delle onde radio for-mano con la direzione del Nord prendono il nome di rilevamenti.
Un rilevamento, o azimut (bearing), `e l’angolo formato da una direzione pre-sa come riferimento e dalla linea congiungente il punto dal quale si effettua il rilevamento con l’oggetto da rilevare.
L’angolo viene sempre misurato in senso orario partendo dalla linea di rife-rimento.
Nella navigazione aerea la direzione che si prende come riferimento `e quella del Nord.
A causa della declinazione magnetica per`o esistono rilevamenti veri (Rilv ), riferiti alla direzione del Nord vero, e rilevamenti magnetici (Rilm), riferiti alla direzione del Nord magnetico.
Quando il rilevamento di un aereo in volo viene effettuato da una stazione a terra gli angoli di rilevamento vero e magnetico sono detti diretti; quando invece `e un aereo in volo che rileva una stazione a terra gli angoli di rileva-mento sono detti inversi.
La differenza fra un rilevamento diretto e il corrispondente rilevamento in-verso `e di 180◦.
Ogni linea congiungente una stazione a terra con un aereo in volo costituisce una linea di posizione: l’aereo che `e stato rilevato o che ha effettuato il rile-vamento sa infatti di trovarsi su un punto di questa linea.
Un concetto importantissimo per la navigazione radiogoniometrica `e che l’orientamento dell’asse longitudinale dell’aereo rispetto alla linea di posi-zione non influenza assolutamente il valore del rilevamento da e per la sta-zione.
4 – Sintesi degli autopiloti
Il termine oggi pi`u diffuso per fare riferimento ai rilevamenti magnetici, anche se non sempre appropriato, `e radiale.
La diffusione del termine `e dovuta alla grande popolarit`a acquisita dal VOR che `e l’ausilio standard ICAO per la navigazione a corto e medio raggio. Invece un altro tipo di rilevamento, che `e specificamente riferito all’uso di strumenti come ADF o HSI, `e quello denominato polare o RilPo (relative bearing) ed `e su questo che si basa il funzionamento del sistema di controllo della navigazione verso un waypoint.
Come illustra la figura 4.113, il valore del RilPo viene preso da bordo facen-do riferimento all’asse longitudinale dell’aereo, e misuranfacen-do l’angolo con esso formato dalla congiungente fra l’aereo e la stazione da rilevare.
Figura 4.113: Rilevamento polare
Secondo quanto esposto in [15] ed in [16] circa i sistemi di controllo di tracking di un velivolo, l’angolo su cui si effettua la correzione rispetto al rilevamento polare desiderato o, equivalentemente, alla radiale da intercet-tare `e quello di prua ψ: comunque, per assicurare che il sistema completo lavori correttamente anche in presenza di una severa componente di vento trasversale, ci deve essere un termine integrale o nella legge di controllo o in ciclo aperto.
Se il sistema `e tale da correggere la prua rispetto ad un rilevamento po-lare continuamente aggiornato per poter portare il velivolo esattamente sul
waypoint selezionato (homing), la traiettoria che ne risulta `e la cosiddetta “curva del cane” ([14]): se pu`o essere tollerata durante il volo a vista, essa risulta inaccettabile per la condotta del volo strumentale, in quanto, oltre ad allungare il percorso, pu`o portare l’aereo ad urtare ostacoli del terreno o ad interferire con la rotta di altri aerei e comunque man mano che ci si avvicina al punto di arrivo fa aumentare la sensibilit`a del sistema e richiede correzioni della prua sempre pi`u significative ([16]) e quindi angoli di bank e deflessioni del comando di alettone sempre pi`u sostenuti.
Per questi motivi si `e deciso di sviluppare un sistema di controllo che congela il rilevamento polare di riferimento all’istante di accensione dell’autopilota per fare in modo che il velivolo giunga a destinazione sul waypoint, dopo un breve transitorio, con traiettoria rettilinea coincidente con la retta AB (Figura 4.114), evitando cos`ı le forti variazioni finali; inoltre si `e scelto di controllare l’angolo di rotta η piuttosto che la prua ψ, essendo comunque la virata coordinata anche in ciclo chiuso e con vento laterale.
Secondo questa logica di funzionamento dell’autopilota in effetti il velivolo centra esattamente il punto di arrivo; raggiunto il punto di destinazione si richiede l’inserimento di un nuovo waypoint o lo spegnimento dell’autopilota, altrimenti si costringerebbe il velivolo a virare di 180◦ per tornare indietro.
Il calcolo del rilevamento polare viene eseguito con le convenzioni e per
Figura 4.114: Navigazione verso un waypoint
4 – Sintesi degli autopiloti
Riassumendo, nota la posizione del punto di arrivo B le cui coordinate sono inserite nel display della periferica Mappa e misurate quelle attuali del punto A tramite GPS, si ha: αRILP O = atan2(X,Y ) X = (LON B) − (LON A) Y = (LAT B) − (LAT A) In defintiva il sistema di controllo impone che si abbia:
η = αRILP O0 − Kcorr· (αRILP O0 − αRILP O) (4.11)
dove αRILP O0 `e congelato nell’istante in cui si vuole rendere attivo l’autopilota
cio`e, come descritto nel §5.2.2, quando sia l’interruttore generale del quadro autopiloti che quello particolare della navigazione verso un waypoint sono entrambi accesi.
Il termine aggiuntivo indica la correzione, proporzionale alla differenza tra il rilevamento polare iniziale e quello attuale, necessaria per portare la rotta a coincidere con la semiretta AB. Il coefficiente Kcorr `e stato scelto pari a 15,
secondo quanto descritto in [16].
Lo schema completo multiloop `e di seguito riportato.
Figura 4.116: Schema dell’autopilota della navigazione verso un waypoint
Con riferimento alla CV 1 di cui si riportano anche i risultati in forma grafica, la f.d.t. interessata dalla retroazione risulta:
η δa = −65.8575 · (s + 20.03) · (s + 5.35) · (s + 0.4437) s · (s + 17.277) · (s + 0.6136) · (s − 0.0061) · (s2+ 16.21s + 214.7)· · (s − 408.7) · (s 2+ 8.512s + 118.9) (s2+ 16.9s + 72.66) · (s2+ 31.36s + 490.2) (4.12)
Il controllore `e di tipo PD in quanto `e gi`a presente in ciclo aperto un polo nell’origine che annulla l’errore asintotico per ingresso a gradino.
Gcon(s) = Kη/δa· 100 · (s + 0.18) (s + 100)
Lo zero introdotto 1/TE = 0.18 `e di bassa frequenza e stabile e perci`o alza
subito il diagramma della fase consentendo una buona rapidit`a di risposta del sistema ai guadagni di chiusura scelti per soddisfare i requisiti sui margini di stabilit`a e limitare le variazioni iniziali del comando di alettone; il polo di alta frequenza serve per rendere propria la f.d.t.
Il segno del guadagno Kη/δa `e scelto positivo dalla osservazione delle
singola-rit`a sull’asse reale e del guadagno della (4.12) determinando una fase critica di ±180◦.
Il polo spirale risulta stabilizzato dalla retroazione; l’eventuale instabilit`a va a riguardare i soli poli dell’attuatore del timone, gi`a modificati dallo Yaw
4 – Sintesi degli autopiloti
Damper, attratti sull’asse reale dallo zero reale instabile di alta frequenza della (4.12).
Con analoga metodologia si determinano i guadagni relativi a tutte le condi-zioni di volo, lasciando inalterata la struttura del controllore; si rimanda alla Tabella 4.13 per la visione numerica dei guadagni stessi, dei margini di fase PM e di guadagno GM e del tempo di salita tR della risposta in ciclo chiuso
(tra il 10% ed il 90% del valore a regime) a seguito di ingresso unitario a gradino di η stesso.
Quanto sopra descritto, sempre relativamente al caso CV 1, si rappresenta nelle seguenti Figure che descrivono il luogo delle radici, il diagramma di Bode generalizzato ed in ciclo chiuso, le risposte temporali nei tempi brevi e lunghi delle uscite del piano laterodirezionale a seguito di step unitario di η ed a partire dalle condizioni iniziali proprie di CV 1.
La f.d.t. in ciclo chiuso risulta: η ηref = −2173.2985 · (s + 20.03) · (s + 5.35) · (s + 0.4437) (s + 100) · (s + 18.06) · (s + 1.11) · (s2+ 0.4708s + 0.07014)· · (s + 0.18) · (s − 408.7) · (s 2+ 8.512s + 118.9) (s2+ 13.28s + 52.77)(s2+ 15.32s + 228.3) · (s2+ 34.09s + 533.3) CV Kη/δa PM [deg] GM [dB] tR [s] 0 0.320 77.80 27.80 1.90 1 0.330 79.20 27.30 1.89 2 0.330 81.10 26.70 1.98 3 0.340 83.10 25.80 2.00 4 0.350 85.30 25.00 2.05 5 0.360 88.40 24.10 2.16 6 0.380 92.60 23.00 2.30
Figura 4.117: Luogo delle radici di η/δa: alta frequenza
4 – Sintesi degli autopiloti
4 – Sintesi degli autopiloti
4 – Sintesi degli autopiloti
Verifica sul Simulatore
L’autopilota ottenuto `e stato implementato come gli altri nel Simulatore Stand Alone, descritto al §3.2.1, e secondo quanto suggerito in [13], il siste-ma di controllo `e stato modellizzato all’interno del blocco D.
Il valore delle deflessioni dell’alettone e del timone in uscita dall’autopilota vengono trasmessi, tramite i blocchi goto e from, al Blocco B dove sono pas-sati agli attuatori e sommati ai propri valori iniziali provenienti dal Blocco A dei comandi; si vedano a proposito le Figure 4.123 - 4.127 e 4.67.
In particolare nel Blocco D.1 si calcolano il rilevamento polare e la rotta se-guita; nel Blocco D.2 si congela il valore del rilevamento polare e nel Blocco D.3 si crea il riferimento per l’angolo η per portare il velivolo sulla semiretta congiungente AB, secondo la relazione (4.11).
La corrispondenza tra il modello linearizzato e quello non lineare del Simula-tore rimane provata anche in tal caso; qui si ritiene pi`u significativo graficare i risultati ottenuti col modello non lineare relativamente alla rotta η, alla quo-ta, al comando di alettone, alla distanza dal waypoint selezionato di arrivo B ed alla traiettoria seguita: le Figure che seguono ne mostrano gli andamenti. La simulazione parte dagli stati iniziali della CV 1.
Punto A di partenza LAT A [deg] LON A [deg]
43.683 10.395
Punto B di arrivo LAT B [deg] LON B [deg]
43.800 10.490
Distanza iniziale 0.002626 [rad]
In questa verifica si considera anche la saturazione dei comandi che nel mo-dello di Simulatore del rack vengono ripetute nel Sottosistema di controllo del volo del FMS al momento della costruzione dei segnali per gli attuatori, ottenuti sommando alle variazioni imposte dall’autopilota i valori congelati provenienti dal joystick; per regolare l’appropriato valore dei guadagni Kr e
Kη/δa sono state utilizzate altrettante Lookuptables che hanno come input la