Scuola di Design
Scuola di Ingegneria Industriale e dell'Informazione Corso di laurea magistrale in Design&Engineering
4P-K: Design of a Passive Polycentric
with Pressure measurement Prosthetic
Knee joint
Relatore:
Prof. Giuseppe Andreoni
Tesi di laurea di: Veronica Guenzi
01
02
03
04
L'articolazione ginocchio...13 Configurazione anatomica...15 Analisi cinematica...19 Analisi dinamica...22La protesi di arto inferiore...25
Alcuni numeri...27
Amputazioni di arto inferiore...29
Classificazione del livello di mobilità...32
Protesi di arto inferiore...34
Estetica e psicologia...44
Le protesi di ginocchio...49
Ginocchia monocentriche...51
Ginocchia policentriche...58
Confronto ginocchio naturale e protesico...73
Confronto cinematico...76
Confronto dinamico...80
Confronto biomeccanico...84
Assenza di push off: soggetti responsabili...97
Asimmetria stance-swing...100
Modello per il calcolo dell’efficienza...103
05
06
07
08
09
Nuovo modello cinematico...107Definizione del nuovo cinematismo...109
Sistema di ammortizzamento del carico assiale...131
Dimensionamento dei componenti e scelta dei materiali...136
Sistema di ammortizzazione...145
Elementi di trasmissione del moto e minuteria...150
Cover...155
Proposta di invaso sensorizzato...171
Manifattura...185
Conclusioni...191
Appendice Bibliografia Ringraziamenti
Parte 2: Sviluppo progettuale
Parte 1: Analisi bibliografica
Abstract
In the knee joint prosthetic field there's a continuos research aimed at improving amputees' life quality. The models have evolved from the simplest single axis to the most complex electronically controlled, but retaining a kinematic chain strcucture and aiming at the similarity of the trajectories of the natural and prosthetic center of rotation. This project proposes the development of a new pro-duct following an innovative strategy, using the trajec-tory of a significant point of the femur as a parameter. The bibliographic analysis made it possible to determine the kine-matic and dynamic parameters of reference and the geometry of the surfaces whose relative movement causes the complex natural joint motion. Since this is a complex motion on several planes, sim-plifications have been introduced that allow it to be recreated while not giving up fundamental aspects such as the presence of two axes of rotation, the overall rototranslatory movement and the presence of two different motion periods. An axial load damping mechanism is also proposed that emulates the function of the menisci.
A special integrated cover was designed with the aim of being an accessory means of expression of the user's identity, facilitating the acceptance of a new self-image. The materials allow a coherent inte-gration and the satisfaction of some of the requirements found to be among the most crucial for users but not addressed by the products on the market.
Finally, the development of a sensorized socket is proposed aiming at increasing the pressure data available at the socket-liner-stump interface which can be at the same time a means of evaluating the efficiency of the designed aid and verifying users' deambulation.
Nel mondo delle ginocchia protesiche si riscontra una costante ricer-ca volta a migliorare la qualità di vita dell’utente amputato. I model-li si sono evoluti dai più sempmodel-lici a singolo asse fino ai più complessi controllati elettronicamente ma conservando una struttura a catena cinematica e mirando alla similitudine delle traiettorie del centro di rotazione naturale e protesico.
Questo progetto propone lo sviluppo di un nuovo prodotto seguendo una strategia innovativa, utilizzando come nuovo parametro la traiet-toria di un punto significativo del femore.
L’analisi bibliografica ha permesso di determinare i parametri cinema-tici e dinamici di riferimento e la geometria delle superfici il cui mo-vimento relativo determina il complesso moto caratteristico dell’ar-ticolazione naturale.Trattandosi di un moto complesso su più piani, sono state introdotte semplificazioni che permettessero di ricrearlo pur non rinunciando ad aspetti fondamentali quali la presenza di due assi di rotazione, il movimento complessivamente rototraslatorio e la presenza di due periodi di moto differenti.
Viene inoltre proposto un meccanismo di ammortizzamento del cari-co assiale che emuli la funzione dei menischi.
Un’apposita cover integrata è stata progettata con l’obiettivo di esse-re un accessorio mezzo di espesse-ressione dell’identità dell’utente, facili-tando l’accettazione di una nuova immagine di sé. I materiali scelti ne permettono una coerente integrazione e il soddisfacimento di alcuni dei requisiti risultati essere fra i più cruciali per gli utilizzatori ma non affrontati dai prodotti in commercio.
Infine, si propone lo sviluppo di un invaso sensorizzato volto ad incre-mentare i dati disponibili sui valori di pressione all’interfaccia inva-so-liner-moncone che possa essere allo stesso tempo mezzo di valu-tazione dell’efficienza dell’ausilio progettato e di verifica della corretta deambulazione dell’utente.
01
1.1 Configurazione anatomica
>> Fig. 1.1: classificazio-ne delle articolazioni: artrodia, articolazione condiloidea, ginglimo angolareUn’articolazione è per definizione una struttura che mantiene in reciproca contiguità due o più superfici ossee (1). Il concetto stesso di articolazione rimanda all’idea di movimento così come di forze scambiate, internamente ed esternamente.
Per prima cosa si è quindi ritenuto necessario approcciare il tema con un’indagine dal punto di vista cinematico, dinamico, anatomico e biomeccanico. Una prima parte di analisi dell’articolazione naturale sarà seguita da una corrispettiva dell’articolazione protesica. Un confronto finale è necessario per individuarne i limiti e definire i campi ancora inesplorati dalla tecnologia attualmente disponibile sul mercato.
Spesso definita come una delle articolazioni più complesse del corpo umano, risulta di difficile classificazione. Ne fanno parte femore, tibia e rotula e potrebbe essere ricondotta ad un’artrodia se si analizzasse il solo rapporto che intercorre tra femore e rotula. Tuttavia, estendendo l’analisi alla relazione tra femore e tibia risulta evidente la somiglianza, per alcuni tratti, alle articolazioni condiloidee e, per altri, ai ginglimi angolari.
É una delle articolazioni più resistenti del corpo umano: la sua mobilità permette la flesso-estensione dell’arto inferiore consentendo quindi di camminare e stare seduti così come correre e mantenere la posizione eretta. La sua resistenza d’altro canto permette all’articolazione di farsi carico del peso del corpo.
Per poter raggiungere una visione d’insieme il più completa possibile, l’analisi deve prendere in considerazione anche la struttura muscolare e legamentosa che fa parte di questo sistema complesso.
Le strutture tendinee legamentose hanno come compito principale quello di limitare i movimenti dell’articolazione. Possono essere divise in tre categorie: legamenti crociati, collaterali e legamento traverso.
I legamenti crociati costituiscono il pivot centrale sul quale ruota l’articolazione. Inoltre, il legamento crociato anteriore mantiene la stabilità dell’articolazione, limita la rotazione interna e l’iperestensione e riduce lo spostamento anteriore della tibia rispetto ai condili femorali durante la flessione. Il legamento crociato posteriore invece contribuisce al controllo della rotazione e riduce lo spostamento posteriore della tibia rispetto ai condili femorali durante l’estensione. I legamenti collaterali bloccano i movimenti di inclinazione laterale della tibia sul ginocchio. Le loro estremità raggiungono la massima estensione a ginocchio esteso, mentre si allentano durante la flessione.
Infine, il legamento traverso ha funzione stabilizzatrice permettendo la permanenza in posizione eretta anche per lungo tempo senza ricorrere all’uso dei muscoli estensori. All’azione legamentosa-tendinea si affianca quella muscolare di trasmissione di coppie e forze. ln questo caso possiamo riferirci alle due macrocategorie di muscoli
>> Fig. 1.2: struttura tendinea - legamentosa
Legamento collaterale mediale Legamento collaterale laterale Legamento crociato anteriore Tensore fascia lata Retto
femorale femoraleRetto
Vasto laterale Tratto ileo-tibiale Tibiale anteriore Estensore delle dita
Medio gluteo Medio gluteo
Menisco laterale Legamento crociato posteriore Tendine del quadricipite Patella Condilo femorale Condilo femorale Tendine rotuleo
Grande gluteo Grande gluteo
Adduttori Vasto laterale Tibiale anteriore Semitendinoso Peroneo lungo Gastrocnemio Gastrocnemio Semimembranoso Sartorio Vasto mediale Soleo Soleo Menisco mediale
flessori ed estensori.
Fa parte dei muscoli estensori il quadricipite, che racchiude il vasto laterale, mediale ed intermedio, il cui compito è quello di estendere la gamba e contribuire insieme al retto femorale alla flessione della coscia.
Il gruppo dei muscoli flessori è invece composto da bicipite femorale, semi membranoso, semitendinoso, sartorio e muscolo popliteo. Essi proteggono il legamento crociato da possibili lesioni. Il muscolo sartorio, contraendosi, provoca la flessione e la rotazione del femore a livello dell’anca. Il popliteo invece flette e ruota la gamba sul piano mediale. Si può quindi riassumere il compito della struttura legamentosa nell’apporto di stabilità statica, mentre alla struttura muscolare è attribuito quello di garantire stabilità dinamica.
Infine, un ruolo importante è ricoperto da menischi e cartilagine: il componimento, la collocazione strategica e il funzionamento sinergico permettono di salvaguardare i rapporti articolari.
Entrambe le strutture limitano la compressione in direzione verticale quando sottoposte a carichi assiali. In particolar modo i menischi consentono di scaricare dal 30% al 70% del peso gravante sulla cartilagine articolare stessa stabilizzando così il ginocchio.
La composizione cartilaginosa dei menischi permette di convertire gli sforzi assiali in sforzi circonferenziali, sfruttando così una maggiore superficie: a parità di sforzo, l’ampliamento della superficie interessata corrisponde ad un contributo di forza locale minore. Inoltre, permette di adattarsi ai movimenti relativi articolari contribuendo a ridurre le componenti di attrito: si osserva infatti uno spostamento antero-posteriore fino a 3 mm in zona
1.2 Analisi cinematica
L’articolazione naturale del ginocchio è un cinematismo complesso dotato di 6 gradi di libertà nello spazio. Le componenti di moto possibili sono sia di tipo rotatorio sia di tipo traslatorio.
Con riferimento ai piani ed assi utilizzati usualmente nella trattazione anatomica, possiamo distinguere le seguenti componenti rotatorie:
- roto-traslazione sul piano sagittale, con asse di rotazione che arretra all’avanzare del grado di flessione. Il movimento flessorio attivo naturale è di circa 120°, ma è possibile raggiungere fino a 160° in forma passiva. Il movimento estensorio attivo è di 0°, di massimo 5° quello passivo.
- piccoli movimenti di massimo 6°- 8° in valgo-varizzazione sul piano frontale, solo quando in estensione
- discrete rotazioni fino a massimo 25° - 30° sul piano mediale, solo in flessione.
e le seguenti componenti traslatorie: - antero-posteriore fino a 5-10 mm. - medio-laterale fino a 1-2 mm.
- di compressione fino a 2-5 mm.
Il movimento complessivo è riconducibile ad una roto-traslazione, come può essere dedotto dall’analisi delle contro-ipotesi.
mediale, di circa 9 mm in zona laterale durante un intero ciclo flessorio (2).
Contro-ipotesi 1: ipotesi di puro scivolamento del femore sulla tibia
Contro-ipotesi 2: ipotesi di puro rotolamento del femore sulla tibia
Il puro movimento traslatorio prevede che il punto di contatto fra due corpi in movimento relativo, cioè il punto di contatto del femore con la tibia nel caso in esame, non possa cambiare. Tuttavia, se ciò avvenisse, si avrebbe un urto nella zona evidenziata in Fig.1.4. Questo sarebbe dovuto alla concavità della tibia in prossimità del condilo.
Il puro movimento rotatorio prevede che i punti di contatto varino al variare dell’angolo di rotazione. Tuttavia, nel caso del ginocchio, dopo pochi gradi di flessione non si avrebbe più contatto fra femore e tibia (Fig. 1.5).
>> Fig. 1.4: punto di contatto tibia-femore nell’ipotesi di puro rotolamento. >> Fig. 1.5: perdita di contatto tibia-femore nel caso di puro rotolamento.
Le ipotesi qui sopra discusse permettono di affermare che il moto naturale dell’articolazione è quindi combinato. In una completa flesso-estensione il rapporto fra le componen-ti di rotolamento e strisciamento è variabile. In parcomponen-ticola- particola-re, nell’arco di una completa flessione la cinematica è così composta:
- fra 0° e 15°/ 20° circa: puro rotolamento senza stri-sciamento.
- oltre i 20°: si assiste ad un progressivo allontanamen-to dei punti di contatallontanamen-to. Si riduce quindi la componente di rotolamento in favore di quella di strisciamento.
- negli ultimi gradi: la flessione termina in realtà con un movimento di puro rotolamento.
La particolare anatomia dei condili porta ad un’ulteriore considerazione: essendo asimmetrici lo slittamento avvie-ne in un primo momento solo sul condilo mediale, per poi trasferirsi al condilo laterale. Tale fenomeno, screw home
mechanism, ha come diretta conseguenza la generazione di
una componente di extra-rotazione della tibia in estensione e quindi di intra-rotazione nella successiva flessione.
Quanto riportato permette di comprendere che l’asse istantaneo di flesso estensione non si trovi sempre comple-tamente incluso nel piano frontale, né tantomeno sia sem-pre perpendicolare al piano sagittale. Bensì si muove nello spazio tridimensionale secondo una traiettoria ad elica (Fig. 1.6).
Ai fini della successiva trattazione è utile identificare il cen-tro di istantanea rotazione (CIR) del cinematismo, corri-Quantificazione della roto-traslazione
1.3 Analisi dinamica
L’articolazione del ginocchio sostiene il peso del corpo uma-no, permette il mantenimento della posizione eretta e con-sente tutte le attività di locomozione. Questo implica uno scambio di forze e coppie su più piani. Per analizzarle è ne-cessario imporre le condizioni di equilibrio all’articolazione e considerare il vettore forza peso, la reazione vincolare che si ha al contatto del piede con il terreno, il momento all’anca a cui è correlata la flesso-estensione del ginocchio e le com-ponenti inerziali dovute alla massa non nulla delle parti. In Fig.1.7 una classificazione secondo i piani ed assi anatomici comunemente utilizzati.
spondente al punto di intersezione dei legamenti crociati. Secondo quanto discusso in (3) nemmeno il ClR avrebbe una posizione fissa sul piano frontale. ln condizioni di de-ambulazione leggera viene spesso osservato in posizione laterale rispetto la tibia, mentre altri studi in condizioni di deambulazione non standard dimostrano una traslazione dello stesso verso il fronte mediale.
Inoltre, la riduzione della componente rotatoria in favore di quella traslatoria comporta uno spostamento in direzione posteriore dello stesso, meccanismo detto femoral roll back. Nell’articolazione naturale il complesso cinematismo de-scritto permette di ridurre drasticamente l’attrito fra le par-ti, essendo frazionato in volvente e radente.
>> Fig. 1.6: classificazione delle coppie e forze agenti sull’articolazione ginocchio secondo i relativi piani ed assi anatomici di azione
>> Fig. 1.7: classificazione delle coppie e forze agenti sull’articolazione ginocchio secondo i relativi piani ed assi anatomici di azione.
Asse mediale - laterale
Le componenti di forza si oppongono alla/ inducono la traslazione relativa della ossa. I momenti resistono o inducono la flesso estensione.
Asse antero - posteriore Le forze in questa direzione si oppongono alla/inducono la traslazione relativa delle ossa. I momenti resistono inducono abduzione e adduzione
Asse prossimale - distale
Forze di compressione si oppongono alla compenetrazione.
Forze di trazione si oppongono all’allontanamento delle parti (distrazione).
Le coppie resistono o inducono la rotazione mediale e laterale
02
2.1 Alcuni numeri
L’Organizzazione Mondiale della Sanità, nella sua ultima indagine nel campo condotta nell’anno 2015, ha stimato la presenza di 40 milioni di amputati nel mondo (4).
I numeri forniti dalla banca dati INAIL (5) rivelano che nel 2019 sull’intero territorio nazionale siano stati registrati 110.141 nuovi casi di disabilità dovuti a lesioni all’arto infe-riore. Di questi, se si suppongono costanti gli ultimi tassi di-sponibili resi noti nel 2015, circa il 10% ha comportato l’am-putazione dell’arto inferiore sebbene nella maggior parte dei casi sia limitata alla sola parte del piede.
Negli Stati Uniti più di due milioni di persone hanno subito amputazione di almeno uno degli arti inferiori. Si stima che siano circa 180.000 le amputazioni effettuate annualmente e la tendenza sembrerebbe condurre ad un raddoppio dei casi entro il 2050 (6).
Ai numeri qui riportati vanno sommati i casi di amputazio-ne che si verificano quotidianamente in Paesi in cui ci siano conflitti tuttora in corso. Se si analizza il solo specifico caso delle mine antiuomo inesplose, nel 2018 sono rimaste gra-vemente ferite 3.837 persone di cui il 54% bambini.
Nei paesi sviluppati economicamente, e in particolar modo in Italia, solo un ridotto tasso percentuale della totalità dei casi di amputazione registrati è da ricondurre ad infortuni sul lavoro: nell’anno 2005, ad esempio, il tasso era pari al 5% (7). Alcune delle cause principali sono invece diabete, malattie vascolari periferiche, coaguli sanguigni o la neces-sità di intervenire chirurgicamente per la rimozione di tu-mori alle ossa e ai muscoli (8). Sono infine da considerare gli
eventi traumatici estranei al luogo di lavoro.
Le amputazioni causate da problemi di diabete di frequente richiedono di intervenire anche sul secondo arto, spesso nel secondo o terzo anno successivo alla prima amputazione. La perdita di un arto rappresenta sempre un evento dram-matico nella vita dell’individuo e comporta un cambiamen-to radicale imposcambiamen-to delle proprie abitudini quotidiane. L’e-sperienza dell’amputazione causa modificazioni sia sotto il profilo fisico che sotto quello psicologico, di cui si tratterà in dettaglio in [3.5] e successivi. Quest’ultimo aspetto non è assolutamente trascurabile, poiché influisce in modo consi-derevole anche sul percorso riabilitativo. «Spesso la condi-zione psicologica del paziente è peggiorata dalla percecondi-zione alterata di sé che scaturisce dal contrasto tra un’immagine corporea interiore integra, precedente all’amputazione, rafforzata dalla presenza dell’arto fantasma, ed un’immagi-ne esteriore acquisita, che il soggetto non riconosce e non accetta.» (9) .
L’arto protesico dovrebbe quindi presentarsi come un au-silio amico in grado di permettere il recupero della propria parziale o totale indipendenza nello svolgimento delle nor-mali attività e della deambulazione.
Dai primi modelli risalenti al 1500 se ne hanno ora a disposi-zione di ultima generadisposi-zione, dotati di sensoristica in grado di interagire con la biomeccanica caratteristica dell’utente che li indossa.
Una buona protesi dovrebbe quindi poter mettere a proprio agio l’utilizzatore sia dal punto di vista fisico, permettendo il recupero delle funzionalità, sia dal punto di vista psicolo-gico. Grande importanza dovrebbe essere data a questo ultimo punto, spesso trascurato rispetto agli avanzamenti tecnologici osservati nel campo. Una protesi non può
esse-2.2 Amputazioni di arto inferiore
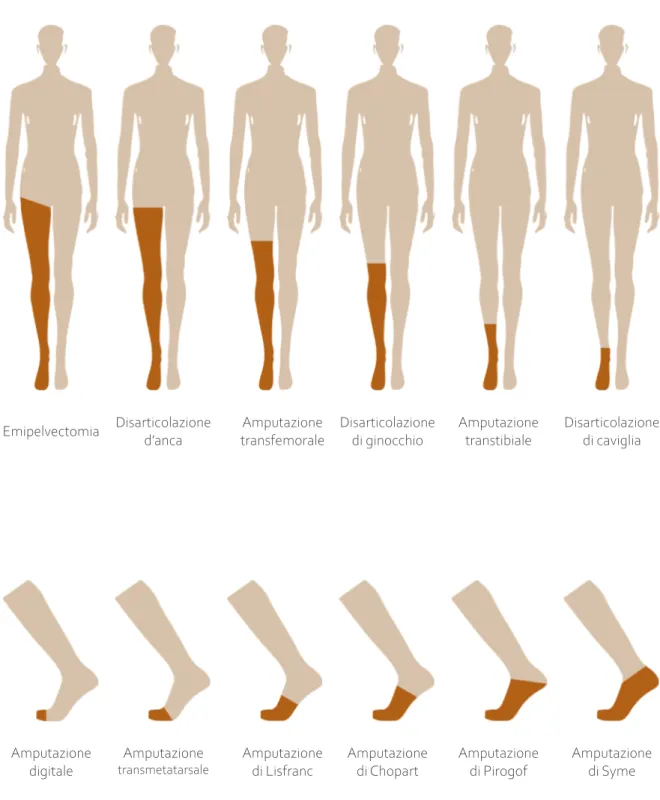
Qui di seguito viene proposta una breve classificazione del-le tipologie di amputazioni di arto inferiore, con maggiore attenzione alle caratteristiche dell’amputazione transfemo-rale.
Le amputazioni vengono in genere classificate a seconda dell’ampiezza della parte rimossa. Si definiscono minori le amputazioni che interessano una sezione poco estesa, come ad esempio le dita. Al contrario si definiscono mag-giori le amputazioni che consistono nella rimozione di am-pie sezioni.
Più dettagliatamente si distingue fra amputazioni parziali e disarticolazioni a seconda che l’articolazione venga rispetti-vamente conservata oppure no.
Fra le amputazioni di arto inferiore è possibile distinguere (10):
- amputazione digitale ovvero amputazione delle dita del piede.
- amputazione parziale del piede. Transmetatarsale se eseguita a livello del terzo medio delle diafisi metatarsali; di Lisfranc se al di sopra del livello del terzo medio delle diafisi metatarsali; di Chopart se a livello dell’articolazione fra cu-boide-scafoide e calcagno-astragalo.
- amputazione completa del piede. Di Pirogof se viene escluso il terzo posteriore del calcagno; di Syme se si pro-cede con la disarticolazione della caviglia e rimozione del malleolo tibiale e del perone.
- disarticolazione della caviglia.
re in grado di svolgere efficientemente il compito per cui è stata progettata se non è altrettanto in grado di permettere all’utente di sentirsi a proprio agio indossandola.
- amputazione transtibiale, spesso riferita come am-putazione sotto al ginocchio.
- disarticolazione del ginocchio.
- amputazione transfemorale, anche riferita come amputazione sopra al ginocchio.
- disarticolazione dell’anca.
- emipelvectomia.
L’amputazione transfemorale avviene di solito al terzo me-dio. Può essere ulteriormente categorizzata come corta se eseguita vicino alla testa femorale, intermedia se a livello della diafisi femorale.
Compatibilmente con le finalità dell’intervento l’ampiezza dell’amputazione viene stabilita in modo da permettere sempre la migliore irrorazione arteriosa della parte residua. Quest’ultima deve infatti essere sufficiente per evitare com-plicanze ed ulteriori interventi. Inoltre, il punto in cui prati-care l’amputazione deve consentire l’applicazione corretta dell’ausilio protesico così come garantirne un uso efficace. Il moncone ideale dovrebbe quindi avere un buon trofismo muscolare, mantenere un’efficiente circolazione sanguigna e non risultare dolente.
Fig. 2.1: classificazione delle amputazioni di arto inferiore.
Emipelvectomia Amputazione digitale Disarticolazione d’anca Amputazione transmetatarsale Amputazione transfemorale Amputazione di Lisfranc Disarticolazione di ginocchio Amputazione di Chopart Amputazione transtibiale Amputazione di Pirogof Disarticolazione di caviglia Amputazione di Syme
2.3 Classificazione del livello di mobilità
Determinare il livello di mobilità dell’utente utilizzatore di protesi è uno dei parametri fondamentali per scegliere la tipologia di ausilio a lui più adatto.
La classificazione MFCL ideata dall’amministrazione finan-ziaria degli Stati Uniti per l’assistenza sanitaria è la più nota nonché utilizzata, tanto da essere stata adottata da
Medi-care nel 1995. Questa classificazione distingue 5 differenti
livelli, ognuno dei quali è rappresentativo di una diversa ca-pacità di deambulazione dell’utente [Tab 2.1].
Seguendo il metodo MFCL il tecnico ortopedico “può stabi-lire la capacità dell’utente di raggiungere un certo stato fun-zionale entro un certo periodo di tempo” (11). Tuttavia, tale decisione è una valutazione soggettiva della condizione attuale del paziente, del quadro clinico presente e passato, della fisiologia del moncone residuo, di problemi concomi-tanti e del desiderio di mobilità del paziente.
Al fine di fornire una valutazione il più possibile oggettiva è stato proposto il metodo alternativo AMP, ideato e svilup-pato da Gailey et al (12).
Il soggetto amputato è invitato a svolgere una serie di pro-ve la cui valutazione oggettiva è stata testata e dimostra-ta essere cosdimostra-tante e ripetibile nel tempo. Per ogni prova il tecnico ortopedico o personale competente è invitato ad attribuire un punteggio, seguendo una griglia che distingue in maniera oggettiva il possibile esito della prova richiesta. Così facendo, sommando il punteggio ottenuto in ogni sin-golo test, si ottiene un valore compreso fra 0 e 47. Esiste una correlazione diretta fra il risultato del test AMP e le catego-rie del sistema MFCL [Fig. 2.3].
A seconda del livello di mobilità del paziente sono perciò definite le caratteristiche della protesi a lui dedicata.
Key - Level K0 K1 K2 K3 K4 Descrizione
L’amputato non ha l’abilità di muoversi in maniera indi-pendente ed usa la protesi
solo a fini estetici L’amputato può camminare
lentamente in ambienti domestici su superfici piane,
per brevi spostamenti L’amputato, in ambienti esterni, riesce ad accelerare
la deambulazione e percor-rere superfici lievemente
dissestate L’amputato affronta gior-nalmente percorsi di varia natura con deambulazione alternata per superare vari
ostacoli sul terreno L’amputato va oltre le
clas-siche attività di vita quoti-diana, associando attività sportive e attività ricreative
Tipologia di piede e caviglia
Non idoneo all’utilizzo di alcuna protesi
Chiglia esterna, piede SACH, caviglia o piede a singolo
asse
Piede a chiglia flessibile e piaede/caviglia a multiplo
asse
Piede e sistema di cammi-namento flessibile, piede ad accumulo di energia, piede/
caviglia a multiplo asse o piede a risposta dinamica
Qualsiasi tipologia di piede o caviglia
Tipologia di ginocchio
Non idoneo all’utilizzo di alcuna protesi
Ginocchio a singolo asse, a frizione costante, bloccato
Ginocchio a singolo asse, a frizione, policentrico
Ginocchio a controllo idraulico o pneumatico
Qualsiasi tipologia di ginocchio
>> Tab. 2.1: descrizione dei Key-Level secondo il metodo MFCL.
MCFL 0/1
2.4 Protesi di arto inferiore
Si vuole qui introdurre una panoramica delle tipologie di protesi di arto inferiore descrivendone i principali elementi che compongono il sistema.
Innanzitutto, va precisato che l’arto protesico, ginocchio o piede nel caso di amputazioni di arto inferiore, è solo uno dei tanti elementi che compongono il sistema modulare di interesse. Il termine modulare vuole appunto specificare come il sistema sia composto da diversi elementi la cui con-figurazione permette di adattarsi al meglio alla fisionomia e biomeccanica dell’utente finale.
L’invasatura, realizzata a immagine della fisionomia del moncone residuo, è il primo elemento di congiunzione fra corpo e sistema artificiale e per questo una delle parti più critiche che compongono il sistema. L’invaso deve cal-zare in maniera efficiente, garantire un’adeguata distri-buzione dei carichi e assicurare stabilità e controllo.
Si consideri che i problemi relativi all’interfaccia moncone - invaso sono una delle principali cause per cui molti amputati decidano di smettere di indossare una protesi, rinunciando così ad una maggiore indipendenza e qualità di vita.
Per ottenere l’invaso per prima cosa si realizza il negativo della porzione di arto residuo. Questo è poi riempito con gesso per ottenere lo stampo positivo.
Inizia ora la parte più complessa, detta rettifica, in cui un tecnico esperto procede rimuovendo materiale nelle zone critiche che potrebbero rappresentare dei punti localizzati a pressione maggiore e causare disconforto e/o dolore
dossando l’invaso. Ad operazione terminata si procede con la realizzazione dell’invaso definitivo per mezzo di lamina-zione con fibra di carbonio e resina oppure fibra di vetro o nylon.
Si osservi come l’operazione di rettifica sia prettamente artigianale nonché altamente personalizzata e si basi sulla sola esperienza del tecnico, sebbene recentemente siano state sviluppate soluzioni che cerchino di proporre un pro-dotto standard in grado di adattarsi alle diverse fisionomie degli utenti (Fig. 2.3).
Il metodo di realizzazione dell’invaso appena descritto pre-vede che prima della laminazione del modello definitivo vengano realizzati degli invasi provvisori intermedi, sotto-posti a numerose prove di fitting sull’utente. Questo per-mette di apportare ulteriori modifiche al calco positivo del moncone in caso siano riscontrati problemi. La conseguen-za è un processo lungo che può richiedere mesi prima di giungere alla forma definitiva.
Una soluzione alternativa è stata proposta dall’azienda
Os-sur: il sistema brevettato Modular Socket System permette di
ottenere immediatamente l’invaso definitivo modellandolo direttamente sulla porzione di arto residua (13). Il processo è facile e veloce, ma poco accessibile a causa del costo ele-vato.
Esistono due diverse principali tipologie di forma di invaso per amputati transfemorali: invaso a quadrilatero e a con-tenimento ischiatico. La differenza principale risiede nella porzione a cui viene demandato di sostenere il carico dovu-to al peso corporeo.
Nel primo caso si tratta della porzione ischiatica di cui viene
retta di carichi.
Nel secondo caso il carico è distribuito su tutta la superficie del moncone in maniera indifferenziata, garantendo un migliore comfort e maggiore controllo della protesi da parte dell’uten-te.
L’aderenza fra invaso e moncone è garantita dalla generazio-ne di una pressiogenerazio-ne generazio-negativa generazio-nel momento in cui l’invaso viegenerazio-ne calzato. Qualora il contributo di pressione negativa non fosse sufficiente, esistono sistemi di sospensione che possono esse-re integrati.
Fra moncone e invaso viene sempre interposto un ulteriore elemento: il liner. Si tratta di un'interfaccia morbida la cui fun-zione principale è quella di assorbire le forze generate dalla deambulazione, proteggere la pelle del moncone e permette-re all’utente di calzapermette-re la protesi in maniera confortevole per lungo tempo. Spesso è disegnata con una matrice specifica in grado di distribuire gli sforzi normali su zone più ampie e ridur-re gli sforzi di taglio.
Sebbene esistano diverse tipologie di liner, la forma e dimen-sione è generalmente standard. Tuttavia, possono esserne re-alizzati di specifici su misura in caso di moncone dalla forma atipica o con particolari sporgenze ossee.
I materiali più utilizzati sono silicone, poliuretano compatibile e gel elastomerico termoplastico. La superficie esterna è gene-ralmente foderata in tessuto.
All’interfaccia invaso - liner - moncone le condizioni sono tutt’altro che stabili: variazioni della temperatura e dell’umidi-tà, dei valori di pressione esercitati sulla pelle, degli sforzi di ta-glio, contributi di scorrimento, fluttuazioni di volume sono tutti
fenomeni facilmente riscontrabili nella maggior parte degli utilizzatori di protesi.
Questi cambiamenti possono essere critici e rappresentano un limite per la maggior parte dei liner tradizionali, sebbene gli ultimi sviluppi abbiano permesso il lancio sul mercato di prodotti studiati specificatamente per risolvere almeno una delle condizioni critiche elencate sopra. Si faccia riferimen-to, ad esempio, ai prodotti Silcare Breathe Liner di Endolite e
Smart Temp liner di Ohio Willow Wood (Fig. 2.5).
>> Fig. 2.5: Silcare
Brea-the Liner, Endolite. Liner
con microfori realizzate a laser per una migliore traspirabilità della pelle.
Protesi transtibiali
Dopo aver realizzato l’invaso, è possibile comporre il siste-ma per mezzo di adattatori e tubolari che permettono di congiungere l’invaso con il piede e consentirne la regolazio-ne al firegolazio-ne di un corretto alliregolazio-neamento.
Esistono diverse macrocategorie di protesi transtibiali la cui scelta, come anticipato, dipende dalle caratteristiche dell’u-tilizzatore: lunghezza del moncone, età, livello di mobilità, stabilità richiesta, attività tipiche giornaliere e ritmi in gene-re sostenuti.
fonda-mentali che la protesi deve rispettare, mentre per utenti più dinamici a volte acquista maggiore importanza un design ad alto impatto ed efficienza. In entrambi i casi è comunque molto importante considerare il ritorno energetico garan-tito dal piede in modo da non affaticare l’utente eccessiva-mente durante le operazioni di deambulazione e minimiz-zare l’impatto sul resto del corpo.
Sono disponibili cover cosmetiche in PVC o silicone dall’ef-fetto naturale per protesi dall’aspetto poco antropomorfo in grado di garantire maggiore comfort estetico all’utilizza-tore.
Qui di seguito una panoramica delle principali tipologie di piedi protesici:
- piede SACH il cui acronimo, Solid Ankle Cushion Heel, indica la condizione ricreata di tallone comprimibile in gra-do di permette la flessione pseugra-do plantare. Non è gra-dotato di alcun cinematismo, si tratta di un prodotto economico ma a bassa efficienza ed è adatto ad utenti con basso livello di mobilità.
- piede rigido dinamico costituito da una struttura si-mile al piede SACH ma con la differente presenza di seg-menti elastici a diversa densità che permettono una
flessi-bilità maggiore.
- piede articolato a singolo asse costituito da una semplice cerniera installata in prossimità dell’altezza della caviglia naturale o appena sotto questa. Questo semplice giunto permette i movimenti di dorsiflessione e plantarfles-sione. Dei paracolpi in genere situati nella parte posteriore del giunto permettono di assorbire e ammortizzare gli urti, specie durante la fase di trasferimento del peso.
- piede articolato pluriassiale in grado di garantire mo-bilità anche sul piano trasversale e frontale. A differenza del piede articolato a singolo asse, oltre ai movimenti di dor-siflessione e plantarflessione sul piano sagittale, garantisce anche i movimenti di eversione/inversione e rotazione in-terna/esterna sugli altri due piani di riferimento.
- piede a reazione dinamica, anche definito a restitu-zione di energia, così chiamato perché in grado di accumu-lare energia durante la fase di carico e restituirla nella fase di spinta grazie alla sua realizzazione in fibra di carbonio volta a sfruttarne le proprietà meccaniche.
Protesi transfemorali
Come nel caso di protesi transtibiali, ad invaso realizzato è possibile comporre il sistema per mezzo di adattatori e tu-bolari che permettono di congiungere l’invaso prima con il ginocchio e poi con il piede e consentirne la regolazione al fine di un corretto allineamento.
Anche in questo caso è possibile distinguere delle macroca-tegorie all’interno delle quali i prodotti si differenziano per efficienza e possibilità di movimento garantita così come sensazione di stabilità e sicurezza ricreata o dinamismo e adattabilità permessi.
>> Fig. 2.6: esempi di protesi transtibiali.
Nel caso di protesi transfemorali i criteri di classificazione sono multipli. Dal punto di vista cinematico si distingue fra:
- ginocchio bloccato basato su un semplice
meccani-smo a cerniera il cui unico movimento consentito è quello di rotazione intorno all’asse della protesi.
- ginocchio a singolo asse a frizione in cui viene sfrutta-to lo stesso meccanismo cinematico delle ginocchia blocca-te ma con maggiore gioco fra le parti e la presenza di com-ponenti di attrito relativo per il controllo della cinematica. - ginocchia policentriche caratterizzate da catene ci-nematiche da quattro a sei barre. Garantiscono una miglio-re mobilità così come una maggiomiglio-re possibilità di gestione della stabilità della protesi tramite controllo della posizione del centro di istantanea rotazione del cinematismo con ri-spetto all’asse di applicazione della forza di reazione vinco-lare a terra.
Una seconda classificazione può essere proposta distin-guendo fra protesi meccaniche e protesi assistite. Mentre le prime si basano sulle pure caratteristiche cinematiche e dinamiche del cinematismo, le seconde sono dotate di un controllo della flesso-estensione dato da elementi passivi
o attivi. Nel caso di controllo passivo ci si riferisce alla pre-senza di attuatori idraulici o penumatici che in genere co-stituiscono uno dei segmenti della catena cinematica e la cui azione è legata alla variazione dei parametri cinematici e dinamici del sistema. Nel caso di controllo attivo ci si rife-risce invece alle così dette protesi intelligenti, cioè dotate di sensoristica in grado di identificare la fase del passo in cui si trova l’utente ed innescare attivamente l’azione dei compo-nenti idraulici o pneumatici.
La classificazione qui sopra riportata è sommaria e ha il solo scopo di identificare le macrocategorie di prodotti, che ver-ranno trattate ampiamente con maggiore dettaglio di se-guito.
Giunti al termine di questa panoramica introduttiva si vuole ricordare che le protesi non sono prodotti customizzati ma bensì standard e che non tengono in considerazione la fisio-nomia e la particolare biomeccanica del singolo paziente. Per questo motivo sono dotate di regolazioni al fine di poter individuare il migliore assetto possibile compatibilmente con le condizioni dell’utente.
>> Fig. 2.7: ginocchio a singolo asse e policen-trico.
2.5 Estetica e psicologia
Per essere efficace a tutti gli effetti un ausilio protesico non può essere funzionale esclusivamente dal punto di vista meccanico. La perdita di un arto costituisce un evento trau-matico della vita dell’individuo e sebbene la protesi sia un valido e razionalmente riconosciuto aiuto per riappropriarsi dell’indipendenza nell’esecuzione di gesti e movimenti quo-tidiani, l’accettazione di una nuova immagine e condizione di sé è sempre una prova psicologica molto difficile.
In questo delicato contesto è stato dimostrato che un aspet-to più gradevole dell’ausilio costituisce un grande aiuaspet-to nella fase di accettazione della propria nuova immagine e dell’ausilio stesso. Al contrario, nelle situazioni in cui perma-ne uno stato di disconforto, è frequente giungere al rifiuto di utilizzare l’ausilio seppur consapevoli di perdere in questo modo gran parte della propria indipendenza.
L’importanza dell’aspetto estetico di protesi ed ortesi è messo in luce anche dagli studi condotti su campi differen-ti da quello strettamente legato al mondo degli amputadifferen-ti. Nel caso di protesi acustiche la maggior parte degli utenti di giovane età mostra rifiuto nell’indossare un prodotto che ritiene antiestetico e che porta a concepire sé stessi come soggetti disabili.
L’aspetto estetico della protesi non è un problema relega-to ai soli utenti più giovani, già normalmente in difficoltà nell’accettazione dell’immagine di sé specie in fase adole-scenziale. Al contrario, anche fra gli utenti adulti la tenden-za riscontrata è un tentativo di nascondere il più possibile l’ausilio. Fra gli aggettivi più utilizzati nel descrivere la sen-sazione di disagio che si prova nel dover indossare un appa-recchio acustico quotidianamente, si legge: “asettico”, “ri-corda gli strumenti di una sala operatoria”, “impersonale”.
pre essere nascosto dall’abbigliamento.
Con questa breve introduzione alle problematiche legate all’aspetto estetico della protesi si è voluto mettere in luce quanto il design scelto possa essere impattante sull’utente finale. Il problema verrà trattato in maggiore dettaglio nel capitolo [6], insieme alla definizione dei requisiti di maggio-re importanza emersi da interviste sugli utenti stessi. Nel caso di giovani utenti, la divergenza fra l’apprensione
parentale e il sollecito ad indossare l’ausilio e la sensazione di disagio del giovane utilizzatore è una concreta minaccia alla costruzione del rapporto genitore-figlio.
Là dove il design non viene incontro all’utente, sono gli utenti stessi a reinventarsi designer per trovare soluzioni migliorative: sono numerose le community on-line di utenti che condividono consigli ed esperienze su come abbellire la propria protesi acustica, dove trovare materiale opportuno e quali tecniche utilizzare. Analoghi risultati sono stati otte-nuti intervistando utenti che utilizzano tutori correttori per scoliosi. Ai tutori tradizionali è contestato - oltre all’aspetto estetico non gradito - di essere ingombranti, fastidiosi e im-possibili da adattare facilmente ai capi di abbigliamento de-siderati. In entrambi i casi il design del prodotto funzionale è stato messo in discussione e ripensato da team eterogenei in cooperazione con gli utenti finali, partendo dai bisogni e dalle mancanze emersi. L’aspetto estetico della protesi o ortesi è risultato di maggiore incidenza sull’accettazio-ne personale e dell’ausilio quanto più sono le ore di utilizzo giornaliere.
Nel campo delle protesi per amputati l’approccio al design dell’ausilio è differente anche fra arto superiore ed inferio-re. La ricerca condotta sull’arto superiore è sicuramente maggiore e più evoluta. Alla mancanza di arto inferiore è per lo più strettamente correlata l’impossibilità di deambu-lare, mentre la mancanza di uno o entrambi gli arti supe-riori limita maggiormente l’indipendenza del soggetto nello svolgimento di un più vasto numero di funzioni. Secondo i ricercatori il motivo della differente evoluzione di design ri-siede inoltre nel fatto che l’arto superiore è più visibilmente esposto dell’arto inferiore, mentre quest’ultimo può
sem-03
3.1 Ginocchia monocentriche
Le protesi monocentriche sono il primo modello ad esse-re stato sviluppato per semplicità costruttiva, ma tuttavia ancora in commercio perché ben si adattano ad un elevato numero di utenti a mobilità ridotta. Il cinematismo che le caratterizza è quello di una cerniera semplice. La semplicità cinematica deve tuttavia essere compensata da un mag-giore sforzo muscolare, con particolare lavoro richiesto ai muscoli estensori dell’anca. Inoltre, si tratta di una molto lontana approssimazione della cinematica del ginocchio naturale in quanto permette la rotazione ma senza alcuna componente traslatoria: la conseguenza è quindi una man-cata sinergia con l’arto sano che innesca la nascita di asim-metrie e meccanismi di compensazione dovuti a differenti componenti cinematiche e dinamiche tra i due arti.
A questo meccanismo è possibile interporre un terzo ele-mento al fine di impedire la rotazione relativa fra le parti (Fig.3.1). A seconda del prodotto il blocco può essere attiva-to manualmente o auattiva-tomaticamente in fase stance.
La logica di funzionamento è articolata nei seguenti passi: - in full extension un perno è vincolato nella sede del blocco da una molla in condizione di riposo. L’interposizio-ne del perno all’asse di rotazioL’interposizio-ne del ginocchio impedisce la flessione e obbliga la permanenza in completa estensione.
- per potersi sedere o compiere un movimento che prevede la flessione del ginocchio è necessario tirare una corda che determini la rotazione della leva che permetta l’innalzamento del perno, liberandolo dalla sede vincolata, e che comprima la molla. Al contempo è necessario iniziare la flessione altrimenti il ginocchio tornerà nella condizione precedente.
- nel momento in cui si intraprende la flessione e la tensione alla corda viene rilasciata, la molla torna ad esten-dersi.
- all’inizio dell’estensione il perno scivola sul corpo in-feriore e comprime la molla, fino a quando l’inclinazione non è tale da riallinearlo con la sede del blocco e rilassare gradualmente la molla. A questo punto il perno torna in posizione e la molla alla condizione di riposo, impedendo il movimento verticale del perno.
In alcuni modelli il blocco avviene automaticamente in fase stance per mezzo di molle che, compresse a ginocchio fles-so, spingono in sede il perno bloccante tornando alla lun-ghezza a riposo.
La rimozione del blocco è quasi sempre manuale: il cavo è incernierato ad un gancio fissato sull’invaso. La
rotazio->> Fig. 3.1: meccanismo di funzionamento di un ginocchio a singolo asse con blocco.
ne del gancio controlla la tensione o allentamento del cavo. In alcuni modelli (14) la rimozione del blocco può avvenire per mezzo di pressione sulla patella che funge da copertura estetica del meccanismo. In altri modelli il blocco non si atti-va automaticamente, ma a discrezione dell’utente: è quindi possibile deambulare senza avere l’articolazione bloccata e attivare manualmente il blocco nelle sole situazioni più cri-tiche - quali ad esempio l’ascesa di scale per garantire mag-giore sicurezza.
Infine, nel modello Prosedo 3R81 (15) un cilindro idraulico of-fre resistenza nel momento dello sblocco, permettendo un movimento per la seduta più fluido, e maggiore sicurezza. In via generale, nei modelli più semplici di ginocchia mono-centriche si osservano le seguenti caratteristiche:
- assenza di controllo della fase stance: se non viene in-serito il blocco manuale, il ginocchio va incontro a buckling. - assenza di decelerazione e aiuto alla completa esten-sione in swing.
Lo sviluppo di cinematismi monocentrici con l’introduzione di elementi interferenti ha portato sul mercato l’offerta di ausili che non obbligano all’estensione totale in fase stan-ce. In questi modelli si sfrutta l’attrito fra gli elementi che compongono la cerniera per offrire una forza resistente e impedire buckling (Fig.3.2). Tuttavia, la stessa componente di attrito agisce anche in swing e smorza la flessione ma allo stesso tempo sfavorisce l’estensione completa. Per questo motivo vengono utilizzate una o più o molle.
L’attrito fornito è fisso e costante o, in alcuni casi, può essere variato all’interno di un intervallo di possibili regolazioni per mezzo di un grano. In entrambi i casi si sfrutta una pressio-ne costante esercitata su una superficie rotante. Per questo motivo il paziente, nel momento in cui varierà la velocità di
Un ulteriore avanzamento è stato raggiunto nei modelli che permettono un controllo della fase stance attivato da peso: qui l’attrito non è più costante ma è direttamente propor-zionale alla componente verticale della forza peso.
La forza peso causa la variazione della posizione relativa fra due parti dello stesso componente da cui dipende la varia-zione del diametro del foro relativo all’asse del ginocchio (Fig. 3.3). L’apparente diminuzione del foro causa un au-mento dell’attrito fra i componenti in moto relativo.
Dal momento che il meccanismo frenante è attivato dal peso scaricato sul ginocchio, per poter passare dalla fase stance a quella swing il peso deve essere completamente spostato sull’arto controlaterale.
Durante la fase di swing l’entità dell’attrito dipende unica-cammino, otterrà una risposta poco fisiologica dell’articola-zione.
Dal momento che la forza vincolare a terra aumenta all’au-mentare della velocità di cammino, questo meccanismo non si adatta a tali cambiamenti: il ginocchio naturale rea-gisce infatti con una diminuzione dell’angolo di flessione a causa dell’aumento dell’attrito fra le parti.
>> Fig. 3.2: meccanismo di funzionamento di ginoc-chio a singolo asse a frizio-ne costante.
>> Fig. 3.3: meccanismo di funzionamento di gi-nocchio a singolo asse a frizione variabile dipen-dente dal peso.
mente dal movimento relativo fra i componenti, essendo nulla la componente di forza peso. L’affiancamento di molle può assistere la completa estensione.
L’aumento dell’attrito all’aumentare della GRF (e quindi, in-direttamente, all’aumentare della velocità di cammino) per-mette di simulare la diminuzione dell’angolo di flessione e di adattare il cammino alle variazioni di velocità, emulando meglio l’articolazione naturale.
Tutti i dispositivi, sia che siano a singolo asse o policentrici, per potersi correttamente adattare a variazioni di velocità del cammino devono essere assistiti fluidodinamicamen-te, con pistoni pneumatici o idraulici.
Nei modelli con pistone pneumatico, quando l’utente au-menta la velocità del cammino, il cilindro limita la quantità di aria e permette al ginocchio di flettere più velocemente. All’opposto, quando l’utente diminuisce la velocità di cam-mino, il cilindro incrementa la portata di aria e obbliga l’arti-colazione a flettere più lentamente.
Durante il movimento del pistone, le valvole di controllo forniscono vari gradi di resistenza a seconda dell’angolo di flessione del ginocchio. Questi sistemi, così facendo,
per-mettono di avere una rigidezza variabile e dipendente dalla fase del cammino.
Nei modelli con pistone idraulico viene utilizzata la stessa logica di funzionamento ma sfruttando la portata di un flu-ido. Tendenzialmente si tratta di olio di silicone: l’utilizzo di un fluido non newtoniano permette di sfruttare il compor-tamento variabile a seconda dello sforzo di taglio applicato. Fra le due proposte l’assistenza pneumatica è considerata più performante sebbene, di contro, sia caratterizzata da un peso maggiore.
>> Fig. 3.4: definizione del centro di istantanea rotazione nell’articola-zione naturale.
3.2 Ginocchia policentriche
La configurazione del ginocchio naturale suggerirebbe l’uti-lizzo di un cinematismo a quadrilatero incrociato. Tuttavia, si tratterebbe di un quadrilatero a lati di lunghezza variabile se si prendesse in considerazione il comportamento elasti-co dei legamenti durante la flesso-estensione.
Inoltre, essendo il CIR individuabile dal punto di intersezione delle aste oblique replicanti i legamenti, in un quadrilatero articolato sarebbe sempre nel mezzo del quadrilatero stes-so (Fig. 3.4).
In un ginocchio protesico la posizione relativa CIR - retta di carico incide molto sulla stabilità dell’utente e sulla possibi-lità di controllo della flesso-estensione. Nella configurazio-ne a quadrilatero articolato si troverà sempre prossimo alla linea di carico e molto in basso, diminuendo drasticamente la capacità di controllo da parte dell’utente.
Lo sviluppo nell’ambito ha visto un tentativo di avvicinamen-to alla conformazione naturale accanavvicinamen-tonando il problema dei segmenti a lunghezza variabile e ovviando a quello della
posizione di difficile controllo del CIR con l’introduzione di catene cinematiche semplici. Questi cinematismi, da qua-drilateri articolati a catene fino a sei segmenti, permettono di ottenere un moto complesso con entrambi le componen-ti rotatorie e traslatorie ricercate a seconda della lunghezza che si impone ai segmenti e, al contempo, consentono di traslare il CIR in posizione più elevata così come di spostare la linea di carico anteriormente o posteriormente al ginoc-chio secondo quanto richiesto dalla condizione di moto o stazionarietà.
Un’analisi delle potenzialità e dei limiti delle possibili confi-gurazioni di un quadrilatero semplice è di seguito riportata. Nell’analisi va considerato che in generale il telaio del cine-matismo rappresenta la tibia; la biella è il femore di cui va quindi ricercata una rototraslazione sulla tibia stessa.
Secondo il teorema di Grashof per la classificazione dei quadrilateri, se la somma dei lati minore e maggiore risul-ta minore della somma dei resrisul-tanti due lati allora il lato più corto è una manovella. Si possono quindi ottenere tre diver-se configurazioni:
- a doppia manovella se il lato più corto è il telaio. - a doppio bilanciere se il lato più corto è opposto al telaio.
- a manovella-bilanciere se il lato più corto è adiacente al telaio.
In tutti e tre i casi la biella è soggetta a rototraslazione. I quadrilateri non di Grashof sono tutti a doppio bilanciere e soggetti ad inversione di moto, ma anch’essi permettono di ottenere rototraslazone.
>> Fig. 3.5: quadrilateri articolati e loro traiettorie.
Infine, nel caso particolare in cui i due membri della relazio-ne di Grashof siano equivalenti, si ricade relazio-nei casi di:
- parallelogramma articolato a due manovelle, che causano la sola traslazione della biella. Verrebbe quindi a mancare la componente rotatoria.
- Anti-parallelogramma articolato, cioè il cinemati-smo più simile all’articolazione naturale ma che limita la po-sizione del CIR inferiormente con conseguenti difficoltà di controllo del movimento.
- Parallelogramma isoscele con una manovella e un bi-lanciere, che regolano la rototraslazione della biella.
Come visto, sono molte le configurazioni che permettono la rototraslazione della biella sebbene nessuna permetta la semplice rotazione all’inizio del moto come nel cinemati-smo naturale.
Tuttavia, se si confrontassero le traiettorie caratteristiche delle configurazioni sopra discusse con quella dell’articola-zione naturale, risulterebbero tutte molto differenti.
Nonostante i problemi teorici qui sopra riscontrati, tutti i modelli policentrici possono vantare alcuni aspetti miglio-rativi rispetto agli antecedenti monocentrici:
- la cinematica raggiungibile è più simile a quella del ginocchio naturale.
- garantiscono migliore controllabilità della protesi a fronte di uno sforzo energetico e muscolare minore, grazie allo spostamento verticale del CIR rispetto al centro di rota-zione di meccanismi a singolo asse.
>> Fig. 3.6: policentrismi a quattro segmenti e loro CIR.
elevati in swing, grazie al maggiore apparent shank shorte-ning permesso. Tutto questo si riflette in minore probabilità di inciampo e di caduta.
Volendo analizzare in maggiore dettaglio la capacità di controllo della protesi in funzione della posizione del CIR, si consideri la figura Fig. 3.6 in cui vengono riportati differenti modelli di ginocchia policentriche e relativi CIR. La differen-te inclinazione dei segmenti ladifferen-terali incide sulla posizione del CIR anteriore o posteriore alla linea di carico e sulla quo-ta verticale dello stesso.
Indagando i due aspetti appena citati separatamente, si
Durante un intero ciclo del passo in qualsiasi cinematismo policentrico si osserva uno spostamento del CIR da zona posteriore ad anteriore alla linea di carico: questo sposta-mento è fondamentale per permettere la flessione dell’arti-colazione.
La linea di carico è per definizione la linea congiungente il centro di rotazione dell’articolazione anca e il centro di pressione del piede (16). In un soggetto non amputato se il centro di rotazione dell’articolazione ginocchio è posteriore alla linea di carico, l’articolazione sarà costretta in completa estensione. Solo quando la linea di carico si sposterà in po-sizione posteriore al centro di rotazione del ginocchio sarà possibile flettere l’articolazione.
Allo stesso modo, in un soggetto amputato transfemorale, consideri ora la problematica della quota verticale del CIR. Come anticipato, l’amputazione transfemorale riduce la leva scheletrica utile. Pertanto, un CIR basso richiederà maggiore sforzo energetico da parte della muscolatura del-la coscia rispetto ad un CIR in posizione più elevata (Fig. 3.7).
>> Fig. 3.7: leva richiesta per differenti configura-zioni cinematiche.
fintanto che il CIR del cinematismo risulti posizionato po-steriormente alla linea di carico il ginocchio sarà stabile e bloccato in completa estensione. Spostando il CIR anterior-mente l’articolazione non è più stabile e un momento mu-scolare all’anca può indurre la flessione del ginocchio. Inoltre, affinché il momento muscolare sia sufficiente per contrastare la reazione vincolare a terra e garantire con-trollo volontario della flessione del ginocchio, è necessario che la retta di azione della reazione vincolare ricada all’in-terno di un cono detto zona di controllo volontario (Fig. 3.8).
>> Fig. 3.8: la flessione è impedita dalla posizione del CIR posteriore alla linea di carico. La zona arancione delimita il cono a controllo volon-tario.
La superficie delimitata dal cono di controllo volontario ha vertice nel centro di pressione della reazione vincolare, an-che detto COP. L’asse è coincidente con la linea an-che passa attraverso il COP e il centro dell’anca, e l’ampiezza è tale per cui l’angolo al vertice risulti pari a due volte αmax. Per deter-minare αmax è necessario risolvere l’equazione Eq. 3.1, dove
Mmax è il massimo momento esercitabile all’anca e l la di-stanza fra COP e centro dell’anca.
Mmax=GRF * l * sen(αmax) Eq(3.1)
I modelli policentrici più diffusi sono a quattro barre, ma ne esistono modelli fino a sei barre.
Con riferimento a quanto appena riportato è possibile di-stinguere tre categorie di policentrismi a quattro barre con rispetto alla particolare posizione caratteristica del CIR. Policentrismi a quattro barre con CIR elevato
Policentrismi a quattro barre iper stabilizzati
Sono generalmente caratterizzati da un lungo segmento anteriore e un corto segmento posteriore. Sono dispositivi che apportano beneficio ad amputati geriatrici o amputa-ti con limitata stabilità tramite controllo atamputa-tivo e volontario della muscolatura della coscia dell’arto amputato. In questa configurazione il CIR, in fase stance, è ben posteriore alla linea di carico e ad una quota verticale elevata.
La caratteristica posizione del CIR in posizione decisamente posteriore alla linea di carico in fase di contatto del tallone garantisce elevata stabilità. L’articolazione è forzata e assi-curata in completa estensione senza alcun momento mu-scolare richiesto.
L’elevata quota verticale del CIR permette di intraprendere la fase di swing e consentire la flessione dell’articolazione con un momento muscolare richiesto di entità contenuta.
L’aggettivo iper stabilizzato si riferisce alla particolare posi-zione estremamente posteriore del CIR sia in fase di contat-to iniziale che push-off. Sebbene nella fase iniziale del pas-so questa categoria di ginocchia policentriche si comporti come la precedente, la differenza è notevole nella fase
suc->> Fig. 3.9: schema cinematico e condizione di stabilità di un policentrismo a quattro barre con CIR elevato.
cessiva: nel momento di push-off non si assiste ad uno spo-stamento del CIR anteriormente alla linea di carico. Il CIR permane invece in posizione posteriore e impedisce la fles-so-estensione, comportandosi di fatto come un ginocchio a singolo asse bloccato per tutto il ciclo del passo. Questa condizione persiste fintanto che l’arto è caricato dal peso corporeo.
Per questo tali prodotti ben si adattano ad utenti con limita-te capacità muscolari o che percepiscono insicurezza. Tut-tavia, si tratta di un grosso limite per lo svolgimento delle più comuni attività di deambulazione quotidiane che posso-no includere la necessità di salire o scendere scale o sedersi. Policentrismi a quattro barre con controllo volontario
Policentrismi a cinque e sei barre
Quest’ultima categoria di ginocchia policentriche a quat-tro barre è caratterizzata da una posizione del CIR che, fin dall’istante del contatto iniziale, è molto prossima alla linea di carico. Questo implica che sia sufficiente una piccola per-turbazione del sistema per spostare il CIR anteriormente alla linea di carico e permettere la flessione dell’articolazio-ne.
Questi dispositivi richiedono un elevato controllo musco-lare attivo ma hanno il vantaggio di poter permettere una lieve flessione in fase stance, che avviene anche nell’arti-colazione naturale e che risulta necessaria per un migliore controllo della fase stessa.
I meccanismi a cinque barre introducono il vantaggio di consentire una ridotta flesso-estensione in early stance ad arto carico, permettendo così di ammortizzare e trasferire il
>> Fig. 3.11: schema cinematico e condizione di stabilità di un policentrismo a controllo volontario.
peso sull’arto in maniera graduale e al contempo di limitare un eccessivo innalzamento ed oscillazione del centro di gra-vità con la conseguenza di un minore dispendio energetico e un maggiore senso di stabilità. [30]
I policentrismi a sei barre offrono la possibilità di avere in un qualsiasi istante più punti inattivi o IIJ (Instant Inactive Joints). I punti IIJ si osservano ogni qual volta due segmenti collegati da un vincolo a cerniera hanno stessa velocità an-golare: in un policentrismo a quattro segmenti si può avere un solo IIJ, in un policentrismo a sei barre ce ne sono sempre almeno quattro. La stabilità in fase stance è strettamente legata al numero di IIJ. L’incremento del numero di punti inattivi comporta ulteriore maggiore avvicinamento alla ci-nematica naturale in fase swing e stabilità in fase stance. Controllo delle fasi stance e swing
Nei cinematismi policentrici il controllo della fase stance di-pende dalla posizione relativa fra l’asse anterodistale, il CIR e il vettore della reazione vincolare a terra. L’asse anterodi-stale è il centro di rotazione durante la fase stance, il CIR è il centro di rotazione del cinematismo durante la fase swing. L’early stance flexion occorre ogni qual volta la reazione vin-colare a terra è inclusa fra il CIR e l’asse anterodistale. Nei policentrismi a cinque barre il quinto elemento permet-te di controllare la posizione del CIR rispetto a quella dell’as-se anterodistale per fare in modo che la reazione vincolare a terra cada, nei primi gradi di flessione, all’interno del cono individuato da questi due assi. In genere il quinto elemento è controllato nella sua rotazione da un cilindro idraulico, che ne delimita la corsa. Dopodiché a fase swing intrapresa il ci-nematismo agisce come un normale policentrico a quattro barre.
Durante la fase swing la flesso-estensione del ginocchio dipende dalla presenza di un elemento elastico, dall’unità idraulica o pneumatica predisposta e dall’inerzia della pro-tesi stessa.
La capacità della protesi di adattarsi alla velocità di cammi-no dell’utente dipende, come nel gicammi-nocchio a singolo asse, dalla presenza di un elemento idraulico o pneumatico. Il controllo della portata all’interno dell’elemento predisposto avviene ancora una volta per mezzo di sensori che ricono-scono la fase in corso della camminata.
Infine, il controllo della rigidezza della protesi può avvenire anche per mezzo di ammortizzatori magnetoreologici. Le informazioni fornite dalla sensoristica - funzione deman-data in genere a giroscopi - permettono di rilevare in quale fase del passo si trovi l’utente e innescare, moderare o disin-nescare un campo magnetico per il controllo delle proprietà di fluidi magnetoreologici, in grado di offrire resistenza va-riabile al variare del campo stesso.
Il campo magnetico necessario è generalmente controllato applicando corrente ad un solenoide, il che implica la pre-senza di batterie e la necessità di ricaricarle. Potrebbe esse-re innescato e controllato sfruttando il movimento esse-relativo di un magnete permanente, ma comporterebbe dei ritardi nei tempi di risposta.
L’utilizzo di fluidi magnetoreologici comporta in genere pro-blematiche legate alla sedimentazione e alla forte capacità abrasiva, deleteri soprattutto in presenza di guarnizioni.
04
Confronto ginocchio
naturale e protesico
Con riferimento a (17) e (18) da cui sono tratti i grafici in fi-gura Fig 4.1, Fig. 4.2, Fig. 4.4, sono stati analizzati i dati di gait analysis ottenuti da osservazioni condotte su soggetti sani e amputati, senza per ora focalizzarsi sulla tipologia di protesi calzata.
Lo scopo del confronto vuole essere quello di capire quan-to la camminata naturale differisca da quella di un paziente amputato valutando gli angoli di flesso-estensione alle ar-ticolazioni di anca e ginocchio e l’entità dei momenti forni-ti, così come il rispetto della durata fisiologica delle fasi di stance e swing e la muscolatura convolta.
La prima osservazione dedotta dall’analisi di Farahmand et al., seppur non confermata da quella condotta da Serous-si et al., è un viSerous-sibile ritardo nell’inizio della fase di swing - o prolungamento eccessivo della fase di stance - da parte dell’arto sano del paziente amputato.
A tale proposito un’osservazione generale riguarda la dura-ta media, negli utenti sani, delle fasi stesse: circa il 60% del passo per la fase di stance, e quindi il rimanente 40% circa per la fase di swing. Si tratta perciò di due fasi non simme-triche, la prima ha una durata temporale maggiore.
Inoltre, se si osserva il movimento flessorio del ginocchio in swing, l’articolazione si flette dei primi 30° in un lasso tem-porale pari a circa il 20% della durata del passo, per poi rico-prire un’escursione angolare simile in un intervallo tempo-rale quasi dimezzato. Questo è possibile solo per mezzo di una diminuzione del raggio di curvatura.
Qui di seguito un confronto dettagliato dell’analisi cinema-tica e dinamica di ginocchio sano e articolazione protesica osservati durante un ciclo completo del passo. Si procede con analisi elettromiografica e successiva indagine sui
mu->> Fig. 4.1: risultati cinematici da gait analysis condotta su utenti normali e soggetti amputati, osservati sia all’arto intatto sia all’arto amputato. Grafici ricostruiti con i dati tratti da (17).
scoli responsabili della flesso-estensione al fine di compren-dere la variazione del comportamento nell’utente amputa-to e dedurne una modellazione semplice ma efficace ai fini della progettazione del nuovo cinematismo.
In un paziente sano la curva cinematica del ginocchio ripor-ta una lieve flesso-estensione in fase sripor-tance a cui segue la vera flessione che segna il passaggio da fase stance a fase swing e che termina con una estensione di ritorno al punto iniziale per il successivo passo. Flessione ed estensione sono perfettamente simmetriche in entrambe le occasioni. Inoltre, l’articolazione ad inizio passo è già leggermente flessa e sembra non esserci mai distensione totale per tutta la durata dello stesso.
Nell’arto sano del paziente amputato, al momento zero del ciclo del passo, il ginocchio risulta completamente diste-so. La flesso-estensione in fase stance è molto ridotta e prolungata, con conseguente ritardo dell’inizio della fase di swing.
Una possibile spiegazione è la tendenza da parte dell’ampu-tato di permanere più a lungo nella fase ritenuta più stabi-le, in quanto l’avvio dello swing implica lo spostamento del peso sull’arto protesico.
Nell’arto amputato, sebbene a livello dell’articolazione si re-gistri una partenza in leggera flessione, si ha assenza totale di flesso-estensione in fase stance e un’entità della stessa nettamente minore in fase swing. In genere quindi l’entità della flesso-estensione è talmente minore da essere prati-Confronto cinematico all’articolazione ginocchio
camente nulla nella prima fase.
Il motivo in questo caso è da ricercare nell’assenza di pu-sh-off dovuta alla scelta costruttiva di molti piedi protesici.
Soggetti non amputati, al contatto iniziale, mostrano l’arti-colazione flessa al valore massimo registrato in un ciclo del passo. Inizia quindi un’ampissima estensione che culmina in prossimità della fine della fase stance. Segue quindi una flessione per tornare alla condizione di partenza.
Nel lato sano del paziente amputato l’anca, in partenza, ri-sulta meno flessa. L’estensione è visibilmente prolungata causando una riduzione dei tempi utili per la flessione che registra anche un’escursione angolare minore. In generale quindi possiamo parlare di incremento del tempo comples-sivo in cui l’anca è estesa.
La causa potrebbe essere il contributo dell’articolazione per lo svolgimento della fase di swing nell’arto protesico. La conseguenza è però un eccessivo sovraccarico dell’arto sano ed un’eccessiva plantarflessione alla caviglia.
Nell’arto amputato si riscontrano le stesse dinamiche ri-portate per l’arto controlaterale, aggravate da una minore entità dell’estensione: più l’estensione è ampia, più l’utente contribuisce a spostare il CIR anteriormente alla linea di ca-rico e a rendere possibile la flessione del ginocchio. In que-sto caso l’utente, sul lato amputato, attua un meccanismo di compensazione al fine di mantenere il CIR il più possibile posteriore o, al più, anteriore ma molto prossimo alla linea di carico. Inoltre, va aggiunto che l’assenza di propulsione da parte del piede protesico non aiuta a compensare la fles-sione.
Confronto cinematico all’articolazione anca
La caviglia di un paziente sano all’istante zero del passo ri-sulta leggermente plantarflessa. A questa condizione inizia-le segue un’estesa dorsifinizia-lessione che prosegue fino a quasi la fine della fase di stance. Segue una plantarflessione ben oltre lo zero angolare. Un’ulteriore dorsiflessione permette il ritorno alla posizione neutra, ma è seguita da un’ultima plantarflessione per consentire il rientro alla posizione an-golare di inizio del passo successivo.
Nell’arto sano del paziente amputato si riscontra la tenden-za opposta all’inizio del passo: al contatto iniziale si registra una leggera dorsiflessione invece che plantarflessione. Il successivo ciclo di dorsiflessione - plantarflessione è tem-poralmente prolungato, a tal punto da ritardare quello atte-so nella fase di swing. Tuttavia al raggiungimento della fase di swing, nonostante il ritardo, la plantarflessione mantiene la stessa durata e la successiva dorsiflessione è più estesa nel tempo.
Come osservato nell’analisi del passo del paziente non am-putato, il ciclo si conclude con una plantarflessione per per-mettere il ritorno alla condizione di partenza.
La dorsiflessione prolungata in fase stance è sintomo dell’accorciamento della fase di swing dell’arto amputato, nonchè della condizione che all’utente risulta più instabile e insicura.
Come anticipato, l’articolazione nell’arto amputato registra una dorsiflessione più prolungata e meno intensa in fase stance e una plantarflessione di entità ridotta in fase swing. Questo secondo aspetto è dovuto all’assenza - o molto in-feriore entità - dell’effetto propulsivo nell’articolazione pro-tesica.