Università degli studi di Napoli Federico II
Facoltà di Ingegneria
Corso di Laurea Specialistica in
Ingegneria Elettronica
(Classe delle Lauree in Ingegneria dell’Informazione)
Dipartimento di Ingegneria Elettrica
Tesi di Laurea
Sincronizzazione di Circuiti Caotici di Chua:
Analisi di Robustezza
Relatori
Ch.mo Prof.
Massimiliano de Magistris
Ch.mo Prof.
Mario Di Bernardo
Candidata
Paola Della Corte
Matr. 884/162
Anno Accademico 2008‐2009
Indice
Introduzione ___________________________________________________ v Capitolo 1 ______________________________________________________ 1 Il Caos Deterministico ___________________________________________ 1 1.1 Introduzione ____________________________________________________ 1 1.2 Generalità sui Sistemi Dinamici __________________________________ 3 1.2.1 Nozioni di base _____________________________________________ 3 1.2.2 Sistemi autonomi e non autonomi ____________________________ 6 1.2.3 Stabilità delle soluzioni _____________________________________ 8 1.2.4 Mappe di Poincaré _________________________________________ 10 1.2.5 Esponenti di Lyapunov _____________________________________ 12 1.3 La Teoria del Caos Deterministico ________________________________ 16 1.4 Caos per la Sicurezza delle Comunicazioni ________________________ 29 Capitolo 2 _____________________________________________________ 31 Il Circuito di Chua _____________________________________________ 31 2.1 Perchè il Circuito di Chua? ______________________________________ 31 2.2 Analisi del Circuito _____________________________________________ 33 2.3 Morfologia della Dinamica ______________________________________ 36 Capitolo 3 _____________________________________________________ 44 Sincronizzazione di Dinamiche Caotiche _________________________ 44 3.1 Introduzione ___________________________________________________ 44 3.2 Generalità sulle Reti di Sistemi __________________________________ 453.3 Sincronizzazione delle Dinamiche di Circuiti Caotici ______________ 46 3.4 Esempi d’Interesse in Letteratura _________________________________ 51 3.5 Particolarizzazione del Modello di Accoppiamento per i Casi di Studio _________________________________________________________ 56 3.6 Cenno sui Sistemi Ipercaotici ____________________________________ 59 3 Capitolo 4 ___________________________________________________ 60 4 Realizzazione, Simulazioni e Verifiche Sperimentali _____________ 60 4.1 Definizione del Lay‐out ________________________________________ 60 4.1.1 L’induttore ________________________________________________ 62 4.1.2 Il diodo di Chua ___________________________________________ 63 4.1.3 Componenti e tolleranze ____________________________________ 68 4.2 Simulazione e Realizzazione Hardware della Topologia Scelta _____ 69 4.3 Simulazioni SPICE della Sincronizzazione ________________________ 75 4.3.1 Coppia di circuiti __________________________________________ 76 4.3.2 Tris di circuiti _____________________________________________ 80 4.3.3 Considerazioni sulle simulazioni ____________________________ 91 4.4 Risultati Sperimentali ___________________________________________ 92 4.4.1 Coppia di circuiti __________________________________________ 94 4.4.2 Tris di circuiti ____________________________________________ 104 4.4.3 Analisi dei Risultati ______________________________________ 124 4.5 Conclusioni ___________________________________________________ 127 Riferimenti Bibliografici ______________________________________ 129
Introduzione
Negli ultimi decenni un interesse sempre crescente della comunità scientifica per le dinamiche dei sistemi non lineari ha portato allo sviluppo della teoria del Caos Deterministico, la quale pone limiti definiti alla prevedibilità dell’evoluzione dei sistemi complessi. Questa imprevedibilità, strettamente legata ad un fattore di incertezza sulle condizioni iniziali del sistema, si pone alla base di un “nuovo mondo” costituito dalle dinamiche caotiche del sistema stesso, e che permette numerosi esempi nella vita quotidiana: basti pensare al cuore umano. E’ stato sperimentalmente provato che l’andamento del battito cardiaco di una persona sana è intrinsecamente caotico, ed anzi la periodicità è sintomo di disfunzioni e patologie. Ancora, numerosi sistemi biologici complessi, come quelli cellulari, mostrano una intrinseca capacità di sincronizzazione. La sincronizzazione di sistemi caotici complessi, oltre alla sua massiccia presenza in natura, trova spazio nel mondo “artificiale”, quale quello delle tecnologie. Tra le diverse applicazioni, ricordiamo quella che permette di realizzare, mediante la definizione di un apposito schema crittografico, un canale di comunicazione sicuro da intrusioni esterne. Ciò può essere ottenuto proprio a partire dalla possibilità sincronizzare fra loro due o più sistemi di tipo caotico, per mascherare il messaggio e garantirne la non intellegibilità a terzi.
Per poter studiare le dinamiche di sincronizzazione è necessario anzitutto disporre di un sistema caotico, dotato cioè di alta
impredicibilità dell’uscita in funzione dei parametri di ingresso. Dal punto di vista circuitale la via migliore sotto molti punti di vista prevede l’utilizzo del circuito di Chua. Esso costituisce il più semplice esempio di circuito caotico ed inoltre è economicamente accessibile e semplice da realizzare.
Obiettivo della tesi è lo studio preliminare, numerico e sperimentale, delle dinamiche di sincronizzazione di più circuiti di Chua, al fine di analizzare le condizioni che ne garantiscano la robustezza (qualora esse esistano).
L’analisi è stata effettuata attraverso due fasi temporali, una prima di studio teorico dell’argomento e della letteratura d’interesse, ed una successiva che consiste nelle verifiche sperimentali. Tale suddivisione dell’operato è altresì riscontrabile nel presente elaborato, che consta quindi di due parti.
La prima parte, costituita da tre capitoli, affronta lo studio della teoria del caos, con richiami a concetti chiave della dinamica dei sistemi, nonché presenta spunti applicativi della stessa. Successivamente si analizza in dettaglio la topologia e le dinamiche del circuito di Chua, “protagonista” del lavoro. Infine, nel terzo capitolo, vengono introdotti i concetti di sincronizzazione, e sincronizzazione di reti di sistemi caotici, con una particolare attenzione alla sincronizzazione di circuiti caotici di Chua tramite lo studio di esempi presenti in letteratura.
La seconda parte dell’elaborato è di carattere implementativo: in essa vengono presentati il modello matematico linearizzato che descrive il problema in esame, la soluzione topologica adottata per la realizzazione dei circuiti, e i risultati delle analisi effettuate al calcolatore delle dinamiche degli stessi nonché dei tentativi di sincronizzazione, effettuati mediante l’ausilio dei software SwCad e MatLab. Infine, alla verifica al calcolatore si aggiunge la prova sperimentale vera e propria: i circuiti di Chua sono stati realizzati presso il Laboratorio di Elettrotecnica del Dipartimento di Ingegneria Elettrica dell’Università Federico II, ed è stato verificato il loro
funzionamento e la capacità di sincronizzazione. L’elaborazione dei dati sperimentali è avvenuta con il supporto del software LabView. Nel corso del lavoro sono stati analizzati diversi possibili scenari, per i quali sono state identificate le condizioni parametriche necessarie a garantire sincronia al sistema complessivo. Ciò si pone come fondamento per successivi studi di robustezza della sincronizzazione per reti complesse di circuiti caotici.
C
APITOLO
1
I
L
C
AOS
D
ETERMINISTICO
1.1
I
NTRODUZIONEʺUna goccia dʹacqua che si spande nellʹacqua, le fluttuazioni delle popolazioni animali, la linea frastagliata di una costa, i ritmi della fibrillazione cardiaca, lʹevoluzione delle condizioni meteorologiche, la forma delle nubi, la grande macchia rossa di Giove, gli errori dei computer, le oscillazioni dei prezzi. Sono fenomeni apparentemente assai diversi, che possono suscitare la curiosità di un bambino o impegnare per anni uno studioso, con un solo tratto in comune: per la scienza tradizionale, appartengono al regno dellʹinforme, dellʹimprevedibile dellʹirregolare. In una parola al caos. Ma da due decenni, scienziati di diverse discipline stanno scoprendo che dietro il caos cʹè in realtà un ordine nascosto, che dà origine a fenomeni estremamente complessi a partire da regole molto semplici.ʺ (J.Gleick, Chaos – La nascita di una nuova scienza)
Risultati recenti dellʹevoluzione della fisica degli ultimi venti anni hanno ultimato probabilmente in modo definitivo quel lavoro di distruzione della visione Laplaciana della realtà fisica come ʺuniverso‐ orologioʺ e del mondo come retto da perfette e perfettamente conoscibili leggi dʹevoluzione, iniziato alla fine del secolo scorso. Se la
meccanica quantistica introduceva il caso in un modo per così dire
esterno e a priori, lʹevoluzione della teoria dei sistemi dinamici lo
scopriva a posteriori dentro teorie, là dove era sempre stato, passando inosservato o quasi. Naturalmente il caso quantistico e quello
deterministico dei sistemi caotici sono due ʺcasiʺ diversi. Il primo è posto
come un attributo della realtà fisica in sé, il secondo continua ad essere frutto, classicamente, della finitezza dei nostri mezzi. Ma ciò che risulta oltremodo significativo è che le conseguenze di questa finitezza sono assai di più vasta portata di quanto si potesse a prima vista sospettare: essa finisce per impedire in linea di principio previsioni affidabili sul comportamento della realtà fisica, anche la più banale, o meglio confina queste previsioni entro un orizzonte temporale ristretto, spesso sorprendentemente ristretto. Il Caos, in questo significato artificiale della teoria delle reti elettriche e della teoria dei sistemi, è appunto lʹesistenza di un orizzonte finito di predicibilità dei sistemi, effetto di una sensibilità alle condizioni iniziali che amplifica lʹindeterminazione iniziale, per quanto piccola essa sia, sulla conoscenza del sistema. I sistemi non sono dunque buoni: non conservano, ma amplificano, gli errori.
Come per il caos, anche la complessità ci si presenta oggi come un concetto emergente e denso di significato. ʺComplessoʺ indica qualcosa di molto articolato, di composto di molte parti interagenti tra loro, certo in maniera non banale, in modo cioè che le parti abbiano tutte un certo grado di autonomia l’una dall’altra, ma siano anche dipendenti lʹuna dallʹaltra. C’è un nesso tra complessità e caos? Il caos è forse nientʹaltro che il frutto della complessità?
La risposta, come sappiamo, è no. Sono caotici anche sistemi piuttosto semplici, anche molto semplici, come un pendolo, ad esempio. Viceversa, non è detto che un sistema complesso mostri necessariamente un comportamento caotico. Quello che però avviene sicuramente in un sistema caotico è che se si esplora lo spazio delle possibili evoluzioni a partire da un insieme ristretto e ʺsempliceʺ di possibilità iniziali, si ottiene qualcosa di molto complesso, cioè di dotato
di molti dettagli e popolato di molte parti e alternative. Eʹ da lì che nasce appunto, lʹimpossibilità di una previsione. Lʹuniverso delle possibili evoluzioni diventa sempre più complesso, man mano che ci si spinge in là con il tempo.
1.2
G
ENERALITÀ SUIS
ISTEMID
INAMICIVengono introdotte qui alcune nozioni e alcuni risultati necessari per lo svolgimento di questo lavoro.
1.2.1 Nozioni di base
Cominciamo col definire un sistema dinamico dal punto di vista analitico: un sistema dinamico è un sistema di equazioni differenziali della forma:
( , )
x f x t
Con f U: Rn, e con U aperto su Rn ×R e x dx
dt
.
Lo spazio delle variabili dipendenti è il cosiddetto spazio delle fasi o
degli stati.
Per soluzione del sistema dinamico si intende una mappa φ : U → Rn , con
I intervallo su R. Si può interpretare φ come una curva nello spazio delle fasi, con f campo di vettori tangenti alla curva.
È necessario ricordare il classico risultato del teorema di esistenza e unicità:
supponendo che f sia di classe Cr su di U, ( f Cr (U) ) e che per t1, t2
siano I1 = {t R : t0 − t1 < t< t0 + t1} e I2 = {t R : t0 − t2 < t <t0 + t2}, allora
vale il seguente:
Teorema (di esistenza e unicità)
Sia (x0,t0) U, allora per un t1 sufficientemente piccolo esiste una soluzione φ1
del sistema dinamico tale che φ1 : I1 → Rn,φ1(t0)= x0.
Se f Cr(U), r ≥ 1, ed esiste φ2 : I2 → Rn, φ2(t0)= x0, allora φ1 = φ2, t I3, con
I3 = {t R : t0 − t3 < t < t0 + t3} e t3 = min(t1,t2).
Osservazione
Si utilizza qui una versione del teorema di esistenza e unicità con ipotesi più forti su f, dato che la natura di f non è mai un problema nelle applicazioni che tratteremo.
Altro importante risultato nelle applicazioni è il seguente:
Teorema
Se f Cr (U) allora la soluzione φ(t, t0, x0) è di classe Cr per le variabili t, t0, x0.
Osservazione
Questo permette di fare lo sviluppo di Taylor di una soluzione nellʹintorno di una data condizione iniziale.
Definizione
Sia I un intervallo aperto e A una funzione A : I → Mn×n e siano le funzioni u1,...,un una base di soluzioni del sistema lineare omogeneo:
v Av
Si indica con
1
1 ( ) n k( ) k , , k . k u t u t c u u c
Nel caso in cui i coefficienti A siano costanti, la matrice Z
u1, , un
viene detta matrice risolvente quando Z(0) = Id.
Osservazione
Se i coefficienti sono costanti, posta R = Z(t)Z−1(0), la soluzione al
problema omogeneo è:
u(t)= R(t − t0).
Il teorema di esistenza ed unicità garantisce la soluzione solo per un piccolo intervallo. Per enunciare il teorema che consente di estendere la soluzione, è necessaria la seguente:
Definizione
Sia φ1 una soluzione del sistema dinamico definita su I1 e φ2 una
soluzione del medesimo sistema definita su I2. Si definisce φ2 un
prolungamento di φ1 se I1 I2 e φ2 = φ2 su I1. Una soluzione è detta non
prolungabile se il suo prolungamento non esiste, ed in tal caso viene definito l’intervallo massimo di esistenza.
Teorema
Sia f Cr(U) e φ una soluzione del sistema dinamico, allora esiste un prolungamento di φ fino ad un intervallo di massima esistenza. Inoltre, se (t1,t2) è un intervallo massimo di esistenza, allora (φ(t),t) tende al bordo di U
per t → t1, t → t2.
1.2.2 Sistemi autonomi e non autonomi
I sistemi dinamici possono essere caratterizzati dal fatto che il campo vettoriale dipenda in maniera esplicita o meno dal parametro indipendente t (tempo).
Sistemi autonomi
Un sistema autonomo di equazioni differenziali ordinarie è caratterizzato dallʹespressione :
xֹ= f (x)
con f : U → Rn con U aperto su Rn e φ una soluzione del sistema. Si verifica facilmente che la soluzione di un sistema autonomo è indipendente da un incremento del parametro indipendente, cioè se
φ(t) è una soluzione, allora lo è anche φ(t + τ ) τ R. Seguono due
importanti proprietà dei sistemi autonomi.
Proprietà 1
Sia f Cr(U), r ≥ 1, φ1 una soluzione del sistema dinamico autonomo
definita su I1 e φ1 una soluzione del medesimo sistema definita su I2 ,
Proprietà 2
Sia f Cr(U), r ≥ 1, φ una soluzione del sistema dinamico autonomo
definita su I. Supponiamo esistere due valori t1,t2 I tali che φ(t1)= φ(t2),
allora la soluzione φ(t) esiste t R ed è periodica in t di periodo T = t2
− t1, ovvero φ(t)= φ(t + T ) t R.
Queste due proprietà dicono che due soluzioni qualsiasi (e quindi tutte le orbite) non possono coincidere su di uno stesso punto senza coincidere nel loro intervallo di definizione.
Sistemi non autonomi
Un sistema si dice non autonomo se il suo campo di vettori dipende in maniera esplicita dalla variabile indipendente tempo. Quindi la sua espressione è:
xֹ= f (x, t)
con f : U → Rn, con U aperto su Rn × R e φ soluzione del sistema non
autonomo. Le proprietà espresse per i sistemi autonomi non valgono per quelli non autonomi, ma è sempre possibile scrivere un sistema non autonomo in forma di sistema autonomo. Per la regola della catena: ( , ) 1 dx dx ds f x t dt ds dt È allora possibile scrivere il sistema nel nuovo parametro indipendente s:
' ( , ) ' 1 dx x f x t dt dt t ds
Si definisce il nuovo vettore delle variabili di stato y =[x, t], quindi il sistema non autonomo diviene:
' ( ) [ ( ),1]
y g y f y
che risulta autonomo nella variabile s. Infatti ad una soluzione φ del sistema non autonomo che passa per (x0,t0), corrisponde una soluzione
ϕ(s) del sistema autonomo dallʹespressione ϕ(s)=[φ(s+t0), t(s)= s+t0], con
s0 =0.
Questo banale accorgimento consente di tenere conto solo dei sistemi autonomi nei risultati che seguiranno.
1.2.3 Stabilità delle soluzioni
La nozione di stabilità (o di instabilità) è molto importante nello studio di una soluzione, infatti la stabilità garantisce in qualche modo una proporzionalità tra la perturbazione dellʹingresso di un sistema dinamico e la sua perturbazione. In linea di principio una soluzione stabile di un sistema dinamico se leggermente perturbato varia di poco la sua evoluzione.
Si definisce in maniera analitica questa forte proprietà con la definizione dovuta a Lyapunov:
Sia φ(t, 0, x0) una soluzione del sistema dinamico autonomo definita
nellʹintervallo massimale destro I+, che si può sempre supporre come [0, +∞)
Definizione (stabilità secondo Lyapunov)
La soluzione φ(t, 0, x0) si dice stabile (secondo Lyapunov) se t > 0, δ =
δ(t) tale che:
se x0 x0 allora la soluzione
( )t
( ,0, )t x0 è definita in [0, +∞) e ||ψ(t) − φ(t)|| < t t [0, +∞).Se inoltre ||ψ(t) − φ(t)|| → 0 per t →∞, φ si dice asintoticamente stabile.
In pratica per una soluzione stabile secondo Lyapunov, se si da origine ad un orbita sufficientemente vicino al x0, essa rimarrà confinata nelle
vicinanze di φ(t). Unʹorbita che non è stabile è detta instabile.
Metodo di linearizzazione
Il metodo di linearizzazione consente di determinare la stabilità locale di un sistema dinamico nellʹintorno di una data soluzione.
Si consideri il sistema autonomo
y = f (y, t)
con f C1 (Ω), Ω aperto su Rn e tale che f(0) = 0 e sia Df(0) non singolare.
Sviluppiamo nellʹorigine la nostra f, che ricordiamo essere (almeno) C1: ( ) (0) ( ). f y Df y o y Si ponga A ≡ Dyf(0) e si consideri il sistema (sistema linearizzato) :
z Az
Vale il seguente risultato, del quale si omette la dimostrazione:Teorema
Se lʹorigine è asintoticamente stabile per il sistema
z Az
, allora lo è anche per y f y( ) Teorema (di stabilità lineare) La soluzione nulla del sistema non lineare non autonomo ( ) ( , ) z A t z o x t è asintoticamente stabile se: 0 ( , ) ) lim 0 ) ( ) limitatac) se la soluzione per è asintoticamente stabile t
x o x t a t x b A t z Az Risulta ovvio ricondursi al teorema precedente trasformando il sistema non autonomo in un sistema autonomo.
1.2.4 Mappe di Poincaré
La mappa di Poincaré è una tecnica che consente di trasformare un sistema di equazioni differenziali in un sistema discreto, comportando una serie di vantaggi, tra i quali la riduzione delle dimensioni del problema, senza nulla perdere in termini di interpretabilità dei risultati ottenuti. Lʹidea di fondo di questa tecnica è, dato un sistema dinamico autonomo, prendere una varietà Σ, n − 1‐dimensionale, nello spazio delle fasi, tale che sia trasversale al campo dei vettori nel punto
x
, ovvero tale che:( ) ( ) 0
n x f x
Supponiamo di avere una soluzione γ di periodo T per il nostro sistema dinamico. Allora si posizioni Σ su di un punto di questa orbita. Eʹ possibile trovare su Σ un sottoinsieme aperto V , tale che x V , il tempo che impiega un orbita originata da x a ritornare in Σ è prossimo al periodo T . Chiamiamo questo tempo di ritorno con τ : V → R. Allora si definisce la mappa di Poincaré P come la mappa che relaziona un punto su V con il punto in cui lʹorbita da esso generata incide su Σ la prima volta. Quindi: : ( ( ), ) P V x x x
Eʹ legittimo chiedersi come, data lʹarbitrarietà delle superfici di Poincaré, le mappe varino al variare delle superfici. Eʹ possibile dimostrare che, prese due superfici Σ1, Σ2 e di conseguenza due mappe
P1 e P2, esse siano localmente coniugate, cioè una funzione h tale che:
P1 ◦ h = h ◦ P2
Con h un difeomorfismo di classe Cr (mappa di classe Cr con una inversa anchʹessa di classe Cr) , tale che:
h(Σ1)=Σ2
È possibile estendere questa idea ad un sistema dinamico autonomo, effettuando una cosiddetta mappatura stroboscopia. Tale tecnica consiste nel prendere un orbita φ(t, x0) e posizionare delle superfici
trasversali alla traiettoria scelta con periodo T . Quindi creare una mappa: 1 : ( ( ), ) k k P x x x
Questa mappatura ci servirà per poter trovare agevolmente gli esponenti di Lyapunov per un sistema continuo.
1.2.5 Esponenti di Lyapunov
Ora per trattare questo fondamentale argomento nellʹambito dei sistemi dinamici utilizzerà un approccio intuitivo, cercando di generalizzare a partire dal semplice caso di una equazione di ricorrenza. Si consideri, allʹinizio, unʹequazione di ricorrenza: 1 ( ) k k x f x E si prenda una sua traiettoria, originata da x0:
x x x0, , ,...1 2
e la traiettoria originata da x0 sottoposto ad una perturbazione, che
chiameremox0:
x x x 0, , ,...1 2
.Per poter apprezzare di quanto varia la dinamica del sistema sotto lʹeffetto della perturbazione, si vuole valutare il valore e1 x1 x1
attraverso uno sviluppo lineare. Assumendo che e0 sia piccolo 1 1 1 ( )0 ( )0 '( )0 0 ( )0 e x x f x f x f x e o e . Dopo t istanti si ha che: 0 1 ' 0 0 0 0 0 0 0 0 ( ) ( ) ( ) ( ) t ( ) ( ) t t t t k k x d e f x f x f x e o e f x e o e dx
. Trascurando i termini o(e0):1 1 ' ' 0 0 0 0 ( ) exp ln ( ) . t t t t t t k k k k e f x e t f x e
Per t →∞: ( )0 0 L x t t e e e ,dove x0 è l’esponente di Lyapunov relativo all’orbita generata da x0 e la
sua definizione è: 1 ' 0 1 ( ) lim lno t ( )k t k L x f x t
Esso può essere interpretato, in analogia alla teoria dei sistemi dinamici lineari, come la costante di tempo della dinamica dellʹevoluzione del sistema, se ne viene perturbata un’orbita, per t →∞. Se L(x0) < 0 lʹorbitasi allontana indefinitamente, se L(x0)=0 la distanza rimane costante,
mentre per L(x0) > 0 la perturbazione si esaurisce riportando lʹorbita
perturbata su quella originale. Per un sistema monodimensionale, se la sua orbita è non periodica, il valore dellʹesponente non può essere calcolato esattamente, ma viene iterata la sua definizione finché non converge.
Tale concetto può essere generalizzato per un sistema, sempre discreto, ma di dimensione n.
Si supponga di avere un sfera n‐dimensionale di raggio infinitesimo con condizioni iniziali nello spazio delle fasi. Se si trasforma la sfera sotto lʹazione di una trasformazione lineare, la sfera diviene un ellisse, i cui semiassi, diretti lungo le direzioni principali, sono lunghi (considerando il raggio della sfera di partenza unitario) al tempo t,
1( ) 2( ) ... n( ) r t r t r t A partire da questi valori, si definiscono gli esponenti di Lyapunov per la direzione i‐esima: 1 ( ) lim lnt ( ) lim ln ( ) i o t i t i L x r t r t t
Quindi per come abbiamo ordinato le lunghezze e per come abbiamo definito gli esponenti:
1( ) 2( ) ... n( )
L t L t L t
Alternativamente gli esponenti di Lyapunov possono essere calcolati con la seguente definizione: 1 1 0 0 0 1 ( ) lim ln ( ) ( ) T t t i t i k k k k L x D x D x t
Indicando con λi{•} lʹautovalore i‐esimo della matrice in argomento, e
definendo: 1 1 0 0 ( ) ( ) T t t k k k k M D x D x
, si nota come la matrice sia simmetrica e di come valga, di conseguenza, il risultato del teorema spettrale.Anche qui lʹesponente di Lyapunov esprime il tasso medio al quale la distanza di un orbita converge o diverge, diretta lungo la direzione indicata dallʹautovettore corrispondente. Come detto, la matrice M è simmetrica e quindi grazie al teorema spettrale i suoi autovalori sono reali e gli autovettori formano una base ortonormale dellʹautospazio. Si può quindi dire che lʹesponente di Lyapunov L1(x0) indica la direzione
di maggior crescita, mentre in generale lʹi‐esimo esponente Li(x0) indica
la direzione di maggiore crescita tra quelle ortogonali alle direzioni che lo precedono nellʹordinamento indicato (quindi, ad esempio, il terzo esponente è la direzione di maggiore crescita nello spazio ortogonale alla prima e alla seconda direzione, e così via). Lungo una generica direzione e0 ( che può essere vista come combinazione degli
autovettori considerati ) anche la divergenza dellʹorbita può essere vista come combinazione dei moti proiettati lungo gli autovettori. Per una quantità di tempo sufficientemente elevata i moti relativi agli altri esponenti diventeranno trascurabili rispetto a quello relativo a L1(x0).
Allora per t→∞: 1( )0 0 L x t t e e e .
Lʹesponente maggiore quindi, a lungo andare, caratterizza la dinamica del sistema.
Sistemi tempo‐continui
Per un sistema a tempo continuo lʹidea di esponente di Lyapunov rimane sostanzialmente la stessa, cioè il tasso medio di divergenza delle orbite perturbate. Per un sistema a tempo continuo è possibile definire una mappa stroboscopica di periodo T che associa al punto x la sua posizione a dopo T istanti:
x((k + 1)T )= P (x(kT )) T > 0
e poi calcolare gli esponenti di Lyapunov L xi( )o per la mappa
stroboscopica. Gli esponenti di Lyapunov del sistema continuo originale possono essere trovati sapendo che: ( ) ( ) i o i o L x L x T . Osservazione
Benchè la scelta di T sia arbitraria, è sempre conveniente prende T piccolo, perché una scelta di T grande indurrebbe molti errori nelle simulazioni numeriche. Infatti le definizioni degli esponenti di Lyapunov nel caso n> 1 sono numericamente divergenti.
Esistono comunque molti algoritmi convergenti per il calcolo degli esponenti.
1.3
L
AT
EORIA DELC
AOSD
ETERMINISTICOIl 29 dicembre 1979, il fisico Edward Lorenz presentò alla Conferenza annuale dellʹAmerican Association for the Advancement of Science, una relazione in cui ipotizzava come il battito delle ali di una farfalla in Brasile, a séguito di una catena di eventi, potesse provocare una tromba dʹaria nel Texas[14]. Lʹinsolita quanto suggestiva relazione, diede il nome al cosiddetto butterfly effect, effetto farfalla.
Nel corso di un programma di simulazione del clima, Lorenz fece unʹinaspettata quanto importante scoperta. Una
delle simulazioni climatiche si basava su dodici variabili, incluse relazioni non lineari. Lorenz scoprì che, ripetendo la stessa simulazione con valori leggermente diversi, una serie di dati veniva prima arrotondata a sei cifre decimali, e successivamente a tre, lʹevoluzione del clima elaborata dal computer si discostava nettamente dai risultati precedenti: a quella che si configurava appena una perturbazione, dopo unʹeffimera somiglianza iniziale, si sostituiva un modello climatico completamente diverso. Queste osservazioni hanno portato allo
sviluppo della Teoria del Caos che pone limiti definiti alla prevedibilità dellʹevoluzione di sistemi complessi non lineari.
Nei sistemi lineari, una piccola variazione nello stato iniziale di un sistema fisico, chimico, biologico, o economico provoca una variazione corrispondentemente piccola nel suo stato finale: per esempio, colpendo leggermente più forte una palla da biliardo, questa andrà più lontano.
Al contrario, sono non lineari le situazioni di un sistema in cui piccole differenze nelle condizioni iniziali producono differenze non prevedibili nel comportamento successivo.
Un sistema può anche comportarsi in modo caotico in certi casi e in modo non caotico in altri. Per esempio, da un rubinetto non chiuso le gocce cadono in una sequenza regolare, variando leggermente lʹapertura del rubinetto, si può far sì che le gocce cadano invece in modo irregolare, appunto caotico.
Eʹ impossibile prevedere il comportamento che un sistema caotico avrà dopo un intervallo di tempo anche piuttosto breve. Infatti, per calcolare il comportamento futuro del sistema, anche se descritto da unʹequazione molto semplice, è necessario inserire i valori delle condizioni iniziali.
Dʹaltra parte, nel caso di un sistema complesso non lineare, data la grande sensibilità del sistema agli agenti che lo sollecitano, un piccolo errore nella misura delle condizioni iniziali, oppure una modifica apparentemente irrilevante dei dati immessi ed ovviamente anche il loro successivo arrotondamento durante il calcolo, cresce esponenzialmente con il tempo, producendo un radicale cambiamento dei risultati.
Questo significa che i dati relativi alle condizioni iniziali dovrebbero essere misurati con unʹaccuratezza teoricamente infinita, ma ciò é praticamente impossibile.
Quanto detto spiega perché le previsioni meteorologiche, sebbene descritte con le equazioni deterministiche della fisica, fluidodinamica e termodinamica, ed elaborate
con raffinate tecniche di calcolo eseguite da super computer, producono risultati molto approssimativi. Per rappresentare lʹatmosfera sono necessari sei milioni di numeri e questo comporta i problemi connessi alle misurazioni. Gli strumenti a terra sono molto accurati, ma le sonde in quota possono rilevare la temperatura con un errore di un grado; i satelliti pagano lo scotto di sondare spazi altrimenti irraggiungibili con errori anche di due gradi.
Lʹeffetto farfalla in conclusione, sottolinea come nella maggior parte dei sistemi biologici, chimici, fisici, economici e sociali, esistano degli elementi che, apparentemente insignificanti, sono in grado, interagendo
fra loro, di propagarsi e amplificarsi provocando effetti catastrofici. Questi elementi, e perché trascurati, e perché imprevedibili, e perché non individuabili, costituiscono il dilemma del nostro secolo giacché, come visto, possono condurci a conclusioni errate.
Ecco il motivo per cui molto spesso, ad esempio, per spiegare il comportamento di un sistema come la crescita della popolazione, lʹeutrofizzazione delle coste marine, o le variazioni climatiche, si ricorre ad un modello.
Un modello è una riproduzione semplificata della realtà, ossia unʹastrazione che considera solamente le principali caratteristiche di quello che è il reale oggetto di studio. Tuttavia, un modello, sebbene possa sembrare limitato, in quanto non riproduce completamente la realtà, permette di esaminare gli aspetti più importanti di un problema. Dalla scoperta di Lorenz molto cammino è stato compiuto in tutte le branche del sapere. Tra tutte le definizioni create sul 1900, una sembra la più significativa: il 1900 è il secolo delle Rivoluzioni. Dopo la Relatività e la Meccanica Quantistica, la rivoluzione più importante è la scoperta della teoria del Caos.
Essa ha investito spazi come quello dei matematici, una volta isolati e gelosi delle proprie scoperte, dei fisici, dagli studiosi della meccanica dei liquidi, agli astronomi, dei chimici e degli studiosi di etologia, degli informatici e di quanti si occupano di crittografia, dei cardiologi, degli analisti, dei chirurghi, degli studiosi del comportamento nellʹorganizzazione aziendale, nella comunicazione o nella geriatria. In tutte le discipline lo studio del Caos ha dato conferme sorprendenti e sorprendenti ne sono state finora le conseguenze applicative. Gli studi di tutti gli scienziati dimostrano che il comportamento naturale dei fenomeni è non lineare.
I comportamenti della maggioranza dei fenomeni della natura e dellʹuomo non procedono con ritmi che si ripetono, ma, dopo un periodo regolare, presentano in modo inaspettato una biforcazione in un punto critico che si moltiplica fino a generare una turbolenza. Un flusso regolare si scompone in vortici e mulinelli. Strutture irregolari
interrompono la continuità del confine tra fluido e solido, per esempio quando il liquido si ghiaccia [15].
La turbolenza genera entropia: mescolanza, disordine, casualità. Tuttavia, le parti scomposte, i vortici nel moto dei fluidi, non fuggono via, ma restano vicini, pur seguendo regole proprie.
Ciò avviene per un fenomeno che dà luogo ai cosiddetti attrattori strani. In poche parole la turbolenza si produce restando tuttavia allʹinterno di
una fase.
Alla fine dellʹintero processo si produce unʹautoorganizzazione in una situazione nuova, che a sua volta può riprodurre un altro momento caotico e così via.
Ciò, come già detto, è impredicibile, sebbene si sappia che avviene in forma rigorosa e deterministica.
Uno degli aspetti più interessanti dello studio della dinamica dei sistemi non lineari è lʹorganizzazione che emerge spontaneamente dallʹinterazione di molte componenti elementari [16]. Un classico esempio è quello di un fluido riscaldato dal basso dove in presenza di opportune condizioni al contorno i moti convettivi delle molecole si dispongono secondo le cosiddette colonne di Bénard, che sono formazioni verticali a nido dʹape. Si instaura cioè unʹinattesa cooperazione tra molecole laddove sarebbe atteso semplicemente un aumento del disordine molecolare. I sistemi complessi reagiscono alle modificazioni dellʹambiente esterno riorganizzandosi in modo da esibire proprietà innovative. Lʹautoorganizzazione, infatti, è una struttura spazio‐temporale che non è imposta dallʹesterno ma emerge spontaneamente dallʹevoluzione del sistema stesso come funzione della sua dinamica. Lʹorganizzazione emergente è osservabile ad una scala spazio‐temporale diversa, molto maggiore, da quella molecolare.
La costruzione di modelli matematici per tali sistemi evidenzia che le equazioni che li reggono sono in genere estremamente sensibili alle
condizioni iniziali, in modo che fluttuazioni estremamente piccole danno
Questo indeterminismo di fatto, ma non di principio, non è eliminabile, dato che in un sistema numerico è comunque necessario fissare un certo grado di precisione non infinito e qualsiasi grado anche più alto di precisione produrrà storie dinamiche differenti. Questo è il cosiddetto
caos deterministico, dove il sistema ha un comportamento
complessivamente regolare ma irregolare nel dettaglio, e quindi è impossibile prevedere il suo comportamento negli istanti futuri.
Si definisce allora il Caos come un comportamento non predicibile di un
sistema dinamico deterministico a causa della sua sensibilità alle condizioni iniziali [15].
Più precisamente, un insieme S esibisce sensibilità ai valori iniziali se esiste una ρ tale che, per ogni ε > 0 e per ogni x in S, esiste un y tale che |x ‐ y | < ε , e |xn ‐ yn |> ρ per n > 0. Allora esiste una distanza fissa r
tale che, per quanto precisamente si specifichi uno stato iniziale, ci sono stati vicini che alla fine si allontanano di una distanza r.
Questo è ciò che avviene nei sistemi caotici. Un sistema caotico esibirà quindi sensibilità alle condizioni iniziali, comportandosi in modo complesso.
Non linearità e sistemi dinamici
In natura, molti sistemi sono lineari o approssimabili alla linearità, e grazie alla trasformata di Fourier per cui ogni funzione matematica periodica può essere rappresentata da una serie di onde sinusoidali pure, si è giunti alla modellizzazione di moltissimi fenomeni naturali. Per alcuni sistemi fisici la linearità non è sostenibile, e la loro modellizzazione diviene estremamente complessa: quasi tutti i sistemi dinamici sono caotici, quindi intrinsecamente deterministici, e di fatto non predicibili [12] [13].
Le funzioni lineari si comportano in modo tale che: f(ax+by) = af(x) + bf(y). Nei casi in cui non vale questa eguaglianza, e qui entra in gioco la non linearità, tutto diviene matematicamente più difficile. Ad esempio se: f(x) = 0 e f(y) = 0 per ogni a e b non vale più f(ax+by) = 0, perciò la soluzione va cercata con metodi particolari.
Nessun modello reale è veramente lineare, ma spesso si può approssimare ad una funzione lineare. I sistemi non lineari esibiscono effetti complessi non deducibili con metodi lineari, caratteristica particolare dei sistemi dinamici. Tuttavia, introducendo delle approssimazioni, essi possono essere linearizzati e risolti numericamente con tecniche tipiche dei sistemi lineari.
Come già anticipato nel paragrafo precedente, un sistema si dice sistema dinamico quando esprime la variabilità di uno stato, ossia un punto in uno spazio vettoriale, nel tempo: ( , ) (*) : n n differenziabile dX F X t dt F W R R
La soluzione del sistema è lʹinsieme delle traiettorie in funzione delle condizioni iniziali. Un sistema dinamico è completamente definito da uno spazio delle fasi o degli stati, le cui coordinate lo descrivono in ogni istante, e da una regola che specifica lʹandamento futuro di tutte le variabili di stato. I sistemi dinamici sono deterministici se esiste un unico conseguente per ciascuno stato, stocastici se ne esistono diversi con una certa distribuzione di probabilità come il classico lancio di una moneta.
Lo spazio delle fasi è la collezione di tutti i possibili stati di un sistema dinamico. Può essere finita, come nel caso della moneta in cui si hanno due stati, o infinita se le variabili sono numeri reali.
Matematicamente, un sistema dinamico è descritto da un problema ai valori iniziali. La curva nello spazio delle fasi tracciata da una soluzione di un problema ai valori iniziali è chiamata traiettoria del sistema dinamico.
Si definisce traiettoria costante una soluzione costante x(t) = x(0) di (*), ossia un vettore x(0) per il quale ciascuna componente della parte destra di (*) è zero.
Una traiettoria costante è detta stabile se sono soddisfatte le seguenti condizioni:
a) deve esistere un numero positivo ε tale che, ogni traiettoria che parte allʹinterno di ε di x(0), deve avvicinarsi asintoticamente a x(0),
b) per ogni numero positivo ε, deve esistere un numero positivo
δ(ε), tale che, una traiettoria sia garantita stare entro di x(0)
semplicemente richiedendo che abbia inizio entro δ(ε) di x(0),
c) lʹinsieme di tutti i punti che possono essere stati iniziali di traiettorie che si avvicinano asintoticamente ad una traiettoria stabile è detto regione di attrazione della traiettoria stabile.
Si definisce ciclo limite, o attrattore ciclico, una curva chiusa nello spazio n‐dimensionale con le seguenti proprietà:
a) nessuna traiettoria costante è contenuta nel ciclo limite,
b) qualsiasi traiettoria che abbia inizio in un punto nel ciclo limite deve stare entro il ciclo limite anche in seguito,
c) deve esistere un numero positivo ε tale che ciascuna traiettoria che abbia inizio entro δ(ε) del ciclo limite deve avvicinarsi asintoticamente al ciclo limite,
d) per ogni numero positivo ε deve esistere un numero positivo
δ(ε) tale che una traiettoria sia garantita stare entro e del ciclo
limite semplicemente richiedendo che abbia inizio entro δ(ε) del ciclo limite.
In sintesi, se alcune traiettorie convergono in qualche punto, lʹinsieme degli stati iniziali di tali traiettorie generate è detto regione di attrazione del punto. Una regione di attrazione è in definitiva un insieme di punti nello spazio degli stati di diametro finito tale per cui ogni traiettoria entra e non esce più.
Lʹattrattore, allora, può essere visto come una generalizzazione della nozione di equilibrio, e rappresenta ciò su cui si arresta, o verso cui è attratto il comportamento di un sistema.
Prendiamo un comune pendolo che si muove sottostando a forze dʹattrito che lo rallentano fino a farlo fermare. Si può descrivere il movimento del pendolo utilizzando il cosiddetto diagramma di fase, o di stato, in cui vengano rappresentati su un asse lʹangolo del pendolo con la verticale e sullʹaltro la velocità con cui cambia lʹangolo. Il moto oscillante del pendolo è allora rappresentato da un punto che gira intorno allʹorigine del diagramma di fase; man mano che il pendolo perde energia, il punto si avvicina a spirale allʹorigine dove infine va a fermarsi. In questo caso lʹorigine sembra attrarre il punto in movimento del diagramma di fase.
Questo è il tipo più semplice di attrattore, il cosiddetto attrattore a punto
fisso che descrive, visto, un sistema che evolve sempre verso un singolo
stato. Si passa poi alla forma più complessa di attrattore, detta ciclo
limite. Esso corrisponde ad un sistema, pendolo ideale senza attriti, che
evolve verso uno stato periodico. Nello stato delle fasi vicino al ciclo limite le traiettorie seguono un percorso regolare che può essere circolare o ellittico.
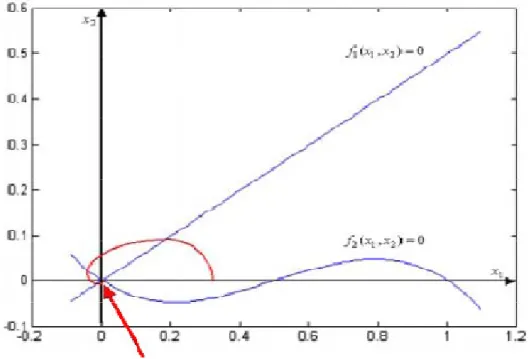
Altri attrattori, definiti semplicemente attrattori strani, descrivono sistemi che non sono né statici né periodici. Nello spazio delle fasi vicino a un attrattore strano, due traiettorie che presentano condizioni iniziali praticamente identiche divergono rapidamente e su lunghe distanze temporali divengono molto differenti. Un sistema la cui descrizione presenta attrattori strani è caotico ed un tipico esempio sono le equazioni di Lorenz. Ma vediamo più in dettaglio le caratteristiche delle diverse tipologie di attrattore. Attrattori puntuali Lʹattrattore è una figura geometrica nello spazio degli stati cui converge il vettore di stato di un sistema dinamico, esaurito il transitorio. Linearizzando nellʹintorno del punto di equilibrio si può dimostrare che gli autovalori della matrice Jacobiana hanno parte reale negativa e quindi tale punto è un attrattore puntuale. Scegliendo qualunque stato
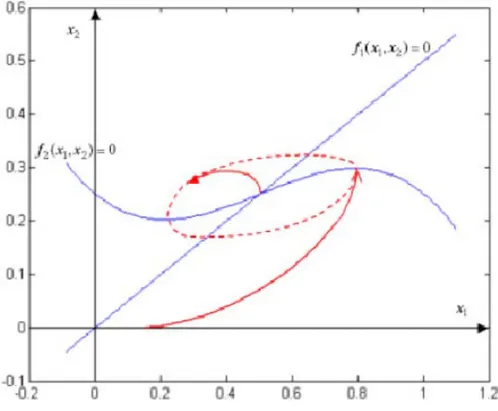
iniziale la traiettoria conseguente converge verso lʹattrattore seguendo una linea di flusso dellʹenergia. Attrattori periodici Se lo stesso sistema precedente viene polarizzato in modo diverso, per esempio sommando un opportuno valore costante alla seconda curva isoclina, il punto di equilibrio diventa instabile.
Esiste tuttavia unʹorbita o ciclo‐limite, verso cui tendono le traiettorie di stato a partire sia dallʹinterno sia dallʹesterno. Una volta raggiunta lʹorbita, questa viene ripercorsa periodicamente allʹinfinito.
La pendenza positiva nel tratto intermedio della seconda curva isoclina destabilizza il punto di equilibrio per questa particolare polarizzazione; tuttavia, la pendenza della curva è negativa allʹesterno del tratto intermedio e questo è sufficiente a garantire la stabilità in senso lato del sistema, pur non essendo asintoticamente stabile. Attrattori caotici o strani
Il fatto di avere un punto di equilibrio instabile, accoppiato ad una stabilità alla Lyapunov in senso lato, non implica necessariamente la presenza di un attrattore periodico.
Si consideri, ad esempio, il sistema dinamico non lineare di ordine 3 (sistema di Lorenz):
1 2 3 ( , , ) ( ) ( , , ) ( , , ) dx f x y z y x dt dy f x y z rx xz y dt dz f x y z xy bz dt
Il sistema è costituito di tre equazioni differenziali di primo ordine in forma normale nelle variabili x, y e z. Lo spazio delle fasi è tridimensionale, e le variabili (x,y,z) non sono variabili spaziali, ma legate ai campi di velocità e temperatura di un fluido in moto convettivo (σ, b e r sono parametri idrodinamici che possono assumere solo valori positivi).
Durante lo studio del sistema precedente, Lorenz si accorse di un andamento non periodico, mentre allora si riteneva che il comportamento tipico di un sistema di equazioni differenziali fosse quello periodico. Volendo ricontrollare i dati ottenuti fino allʹistante T, decise di ripetere lʹintegrazione numerica, e per risparmiare tempo non scelse la condizione iniziale (x (0), y (0), z (0)), ma un punto intermedio
tʹ < T, le cui coordinate erano già state stampate dal calcolatore.
Ovviamente si aspettava di ritrovare gli stessi punti già ottenuti nellʹintervallo [tʹ,T], ma ciò non si verificò. Con suo grande stupore constatò infatti che la causa di questa discrepanza non era attribuibile a errori di integrazione, bensì soltanto a valori iniziali leggermente diversi: mentre nella prima integrazione il punto (x(tʹ), y(tʹ), z(tʹ)) era stato memorizzato con sei cifre significative, nel ripetere lʹintegrazione, la seconda volta, Lorenz ne ricopiò soltanto tre.
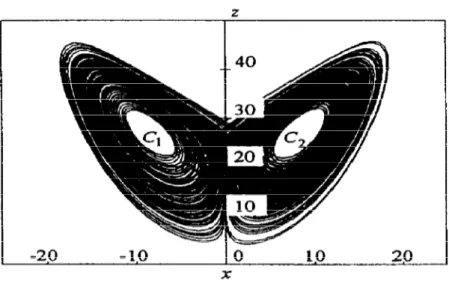
In figura 1.4 (pag. seguente) è mostrato il tipico attrattore di Lorenz, come proiezione della traiettoria nel piano x.
I punti C1 e C2 rappresentano punti instabili per il sistema considerato.
La soluzione si muove con percorso a spirale attorno ad uno dei due punti fissi, per poi passare ad avvolgersi attorno all’altro sempre con moto a spirale. Tale andamento si ripete all’infinito, ed il numero di rivoluzioni attorno ad un punto fisso, prima di alternarsi, varia in maniera apparentemente randomica.
Figura 1.4: Attrattore caotico di Lorenz
Riassumendo: un particolare sistema deterministico può generare un comportamento caotico inteso come comportamento aperiodico, duraturo nel tempo, delle proprie traiettorie. In tal caso, a causa della dipendenza sensibile dalle condizioni iniziali, si possono avere traiettorie che non raggiungono punti di equilibrio e non si chiudono su cicli limite, ma continuano a muoversi nello spazio di stato presentando oscillazioni non periodiche non determinabili a priori. In base alle condizioni iniziali degli elementi il sistema può volgere verso una certa direzione lungo le traiettorie ed evolvere verso la stabilità o l’instabilità. In un circuito elettronico autonomo, come quello di Chua oggetto del presente lavoro, questo comportamento non è dovuto a fattori forzanti esterni ma è una proprietà intrinseca del sistema caotico.
1.4 C
AOS PER LAS
ICUREZZA DELLEC
OMUNICAZIONI
Come appena visto, una delle caratteristiche più conosciute di un sistema caotico è la sua sensibilità alle condizioni iniziali. Si rivelò quindi sorprendente la scoperta ottenuta da Pecora e Carroll, i quali per primi mostrarono che sistemi caotici possono essere sincronizzati inviando solo una parte delle informazioni relative allo spazio di stato da un sistema all’altro [25]. Dopo poco fu suggerito di usare questo risultato per creare chiavi crittografiche, costruite con le informazioni dello spazio di stato non inviate per la sincronizzazione; un primo utilizzo di quest’idea avvenne per l’equazione di Lorenz. L’idea alla base è che accedere al messaggio risulta impossibile senza conoscere i tre parametri dell’equazione, e per questo motivo tale insieme è detto
super‐chiave.
Tuttavia questo sistema si rivela facilmente violabile e la super‐chiave si può determinare rapidamente dal segnale di sincronizzazione. Altre soluzioni che rendono più efficace e sicuro questo sistema da attacchi
esterni sono state studiante del corso degli anni [22] [23][24], ed esse si basano sulla riduzione della durata del segnale di sincronizzazione, fornendolo periodicamente nel tempo; ciò comporta tuttavia un ritardo nel raggiungimento della condizione di sincronizzazione.
Il requisito di sicurezza, fondamentale nella crittografia, rientra naturalmente anche nella crittografia caotica, e costituisce una motivazione importante per la ricerca nel campo della comunicazione
caotica. Pertanto, diverse tecniche sono state supposte e sviluppate,
quali masking con segnale caotico aggiuntivo, switching caotico, e
modulazione con portante caotica. Questo per sistemi a tempo continuo.
Sviluppi in ambito dell’elettronica digitale sono stati altresì proposti, primo fra tutti l’utilizzo di sistemi caotici per generare sequenze numeriche random (RNG) utilizzabili come chiavi o maschere del testo in chiaro. Tuttavia, l’implementazione numerica non gode di particolari vantaggi rispetto al caso analogico. Poiché i calcolatori sono in grado di rappresentare le cifre con una precisione finita, qualunque tipo di orbita di un attrattore caotico, in uno spazio delle fasi a dimensione finita sarà necessariamente periodica. In altre parole, non è possibile generare il caos con sistemi a stati finiti. Si avrà pertanto una periodicità del sistema (e da qui la definizione di PRNG, pseudo‐random numbers generator), e quindi una maggiore vulnerabilità da attacchi esterni.
C
APITOLO
2
I
L
C
IRCUITO DI
C
HUA
2.1 P
ERCHÈ ILC
IRCUITO DIC
HUA?
Il circuito di Chua è un circuito elettronico non lineare, e sin dal suo sviluppo nel 1983 ad opera del prof. Leon
O.Chua (figura 2.1 ), docente dell’università della California, Berkeley, è stato oggetto di numerose attività di ricerca scientifica. Esso ha il pregio di essere l’unico circuito autonomo in cui la presenza del caos è stata provata in maniera analitica, tanto da essere definito a universal paradigm for chaos.
Prima del 1983, nessun circuito elettronico autonomo aveva mostrato comportamento caotico, nonostante gli
sforzi del prof. Matsumoto di realizzare un circuito analogico a partire dalle equazioni di Lorenz. Nel 1984 fu lo stesso Matsumoto a
dimostrare l’intriseca caoticità di un circuito realizzato dal suo collega, e da lui stesso battezzato circuito di Chua, mediante simulazioni al calcolatore ( [1] e [2] ). La verifica sperimentale del comportamento caotico arrivò pochi mesi dopo, ad opera di Zhong ed Ayrom [3].
Nel corso degli anni, e fino ai giorni nostri, sono stati sviluppati diversi modelli e varianti del circuito in questione. Una delle soluzioni più gettonate è quella di realizzare il componente non lineare (il cosiddetto Diodo di Chua, che consente il comportamento caotico del circuito), in maniera semplice ed economica mediante una coppia di amplificatori operazionali e sei resistori di polarizzazione [4].
Grazie al basso costo ed alla efficienza pratica il circuito di Chua è divenuto il circuito di riferimento per applicazioni che richiedono una sorgente di segnale caotico robusta ed economica. Figura 2.2: Il circuito di Chua
2.2 A
NALISI DELC
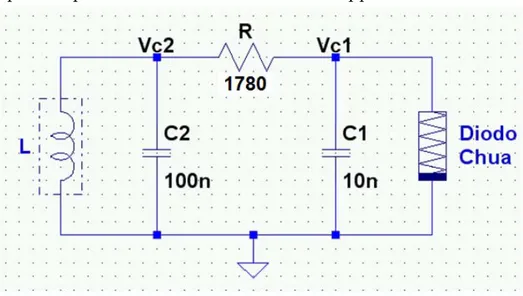
IRCUITOIl circuito di Chua contiene quattro elementi lineari (due condensatori, un induttore ed un resistore) ed un resistore non lineare. Ha pertanto i requisiti minimi necessari (ma non sufficienti) affinchè presenti comportamento caotico:
almeno tre componenti dinamici, almeno un componente non lineare, almeno un componente attivo.
La sua peculiarità di essere un circuito autonomo fa sì che non sia necessario pilotarlo mediante una tensione ac. Partendo dal presupposto che il resistore R, l’induttore L, e i condensatori C1 e C2
assumano valori nominali positivi, risulta necessario che, affinchè il circuito oscilli o esibisca comportamento caotico, l’elemento non lineare sia attivo.
Ciò vuol dire richiedere che la sua caratteristica tensione‐corrente appartenga almeno per alcuni tratti al secondo e quarto quadrante, dove il prodotto v*i risulta negativo, e quindi che l’elemento in considerazione fornisca energia agli elementi passivi. Però, visto che nessun dispositivo fisico è in grado di fornire una quantità di potenza infinita, la scelta di una caratteristica v*i fisicamente realizzabile deve ricadere sulla caratteristica di un bipolo asintoticamente passivo.
Il circuito di Chua rappresentato in figura potrà allora esibire comportamento caotico. In particolare, modificando il valore del resistore lineare, sarà possibile scorrere la gamma delle possibili dinamiche di questo circuito, che esibisce una varietà di biforcazioni e di andamenti caotici.
Il circuito sopra mostrato è caratterizzato da tre variabili di stato, e pertanto può essere descritto dalle seguenti equazioni circuitali:
Figura 2.3: Caratteristica del diodo di Chua
1 2 1 1 2 2 1 2 1 2 1 1 [ ( )] 1 1 [ ] 1 C C C C C C C L L C dv v v f v dt C R dv v v i dt C R di v dt L dove: − vC1 rappresenta la tensione ai capi del condensatore C1, − vC2 rappresenta la tensione ai capi del condensatore C2, − iL rappresenta la corrente passante attraverso l’induttore L,− f(vC1) rappresenta la caratteristica tensione‐corrente del
componente non lineare, approssimata come detto con una spezzata lineare a tratti.
Quest’ultima ha la seguente espressione, con l’andamento riporato in figura:
1 ( ) 2 b a b f v G v G G v E v EA partire da tali equazioni, è possibile adiamensionalizzare il sistema per poterlo trattatare in unaforma più maneggevole nel seguente modo: