Capitolo 4
Realizzazione del modello CAD per l’analisi
cinematica
Per poter definire univocamente le geometrie del modello si è utilizzato il programma ProEngineer Wildfire2.0. Le coordinate dei punti della sospensione sono soggette a variazioni proporzionali alla corsa misurata a centro ruota (punto 16), o che è lo stesso, rispetto al punto a terra del pneumatico (punto D).
4.1 Costruzione del modello cad Wildfire 2.0 per lo studio delle sospensioni Il modello cad è stato costruito partendo dai punti del modello schematizzato in figura 3.1. La posizione degli attacchi al telaio è stata definita dai relativi progettisti e, una volta disegnatone lo scheletro, si sono importati i punti dello schema cinematico S.G.S-2. Si sono quindi disegnati gli assi dei tubi dei triangoli direttamente in ambiente di assieme (Assembly) come facenti parte di un nuovo particolare. Si sono quindi aperte le singoli parti dell’assieme per andare a costruire la geometria vera e propria dei triangoli (figure 4.1 e 4.2). A questo punto si sono disegnati i piani di simmetria dei bilancieri in modo che questi contenessero il centro del giunto di estremità del relativo triangolo inferiore nella posizione statica della vettura. Facendo così l’asse del pushrod interseca il centro del giunto e pone in flessione solo una ridotta parte del triangolo. Non solo, in questo modo la forza che trasmette al rocker giace prevalentemente sul suo piano rendendo possibile la minimizzazione delle forze che questo scambia col perno di collegamento al telaio (figura 4.1). Si sono quindi disegnati i bilancieri in modo da far si che la rette congiungenti attacco telaio-attacco pushrod fossero perpendicolari a quest’ultimo in configurazione statica. Questo al fine di rendere simmetrico il movimento del rocker rispetto al sollevamento ed all’abbassamento del centro ruota. Per lo stesso motivo, si è cercato di ottenere perpendicolarità tra la congiungente attacco telaio-attacco gruppo molla ammortizzatore (figura4.1).
Al fine di determinare la posizione dei punti di interesse al variare della corsa della sospensione è stato importato il modello in ambiente Mechanism Design ProEngineer Wildfire 2.0® (illustrato in Figura 4.1) tramite la modalità Applications/Mechanism.
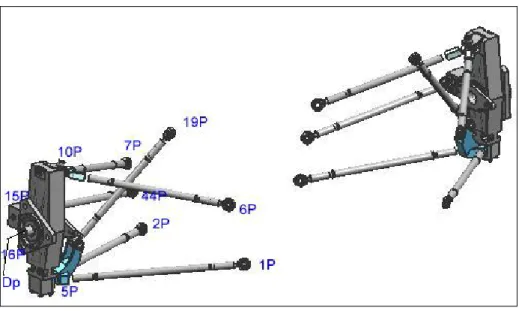
4.1. Modello CAD Wildfire 2.0 sospensioni anteriore e posteriore Maserati MC12.
Il modello è composto da sei corpi rigidi di cui: uno è la ruota, con il cerchio e il sistema frenante( non modellato nella figura). Cinque corpi rigidi (senza contare la cassa veicolo, che costituisce il telaio a cui tutti gli elementi sono collegati) compongono il cinematismo della sospensione: il triangolo inferiore; il porta mozzo; il triangolo superiore; il puntone che collega il triangolo inferiore al bilanciere (rocker) ed infine il tirante di sterzo. La sospensione ha un grado di libertà alla traslazione, con direzione di spostamento verticale. Nel modello sono state imposte separatamente due condizioni di vincolo:
• al fine di determinare la traiettoria dei punti di interesse della sospensione è stato imposto uno spostamento lineare travel wheel - escursione ruota,
da ±40mm del punto a terra ruota-suolo (punto D Figura 3.1.) in direzione concorde alla coordinata Z (motion) per eliminare il grado di libertà alla traslazione.
• Per determinare successivamente la forza agente sul puntone, un vettore forza, composto da tre componenti, può essere applicato sul pneumatico, nel punto a terra D. I valori delle componenti saranno quelli della forza longitudinale, della forza laterale e del trasferimento di carico verticale.
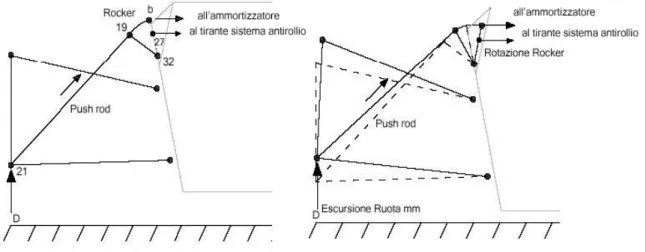
4.1.1 Schema della sospensione La MC12 è equipaggiata con push rod. I push rod sono collegati al bilanciere. Il bilanciere può ruotare in funzione della escursione della ruota. Questo è mostrato schematicamente nella Figura 4.2.
Figura 4.2. Rappresentazione schematica del bilanciere in entrambe le posizioni limite.
Ci sono due situazioni distinte, il puro Bumping e il Rollio puro, mostrate nelle figure 4.3. e 4.4. Le rispettive rigidezze sono rese così indipendenti. Un sistema di sospensioni in cui entrambe le rigidezze possono essere regolate indipendentemente è tuttavia preferito. Tuttavia la presenza del sistema antirollio costituito dal terzo bilanciere centrale e dai due ammortizzatori, ovvia a questo problema.
Figura 4.3 Schema del sistema più comunemente diffuso, quello con due ammortizzatori.
Figura 4.4 Schematizzazione a) rotazione rocker in puro Bumping.
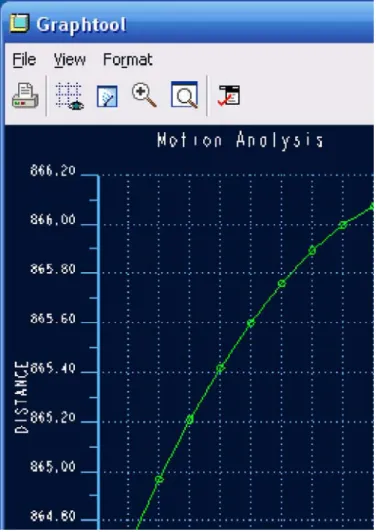
Converrebbe posizionare il terzo bilanciere verticalmente, in maniera che esso possa ruotare secondo un asse orizzontale, in modo che tutti gli assi di rotazione siano paralleli, così facendo tutte le forze applicate e le rispettive reazioni vengono a trovarsi in un unico piano. Comunque con il bilanciere posizionato orizzontalmente, data la simmetria dello schema sospensivo, il sistema lavora in maniera simmetrica. I valori reali della sospensione anteriore verranno mostrati nel prossimo paragrafo e le coordinate dei punti inseriti, verranno raccolti nella tabella 4.1: questi sono stati ricavati in ambiente Mechanism Design, all’interno del software ProEngineer Wildfire 2.0®, nel quale sono state create una serie di Features di analisi-Measure, atte a rilevare le distanze dei vari snodi (uniball-joint ball) e le lunghezze dei principali componenti delle sospensioni. Tali Features di analisi serviranno poi per effettuare le misurazioni durante le analisi cinematiche effettuate di seguito. In seguito si mostra la schermata di uno dei grafici generati dall’analisi cinematica: variazione della semicarreggiata con scuotimento ±40mm.
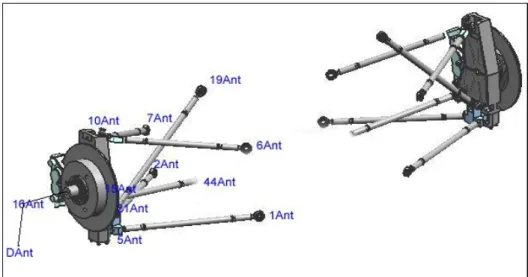
4.2 Descrizione del modello Wildfire 2.0 per lo studio della sospensione anteriore Per la realizzazione del modello cad si è partiti dallo schema realizzato nel modello definito S.G.S.-2 (Suspension Geometry Simulator-2) di Figura 3.1. e si è proceduto quindi a inserire i valori iniziali dei punti caratteristici, tramite le coordinate dei punti di fissaggio dei vari snodi (uniball) in cui sono definiti i joint axis.
Figura 4.7. Modello cad sospensione anteriore.
Tabella. 4.1 - Dimensione Elementi Reali Misurati della Sospensione Anteriore
Elem. Descrizione Elemento da a mm
I Interasse joint ball triangolo inferiore 1 2 312.3
II Lunghezza braccio anteriore triangolo inferiore 1 5 445.4
III Lunghezza braccio posteriore triangolo inferiore 2 5 415.4
IV Interasse joint ball triangolo superiore 6 7 246.2
V Lunghezza braccio anteriore triangolo superiore 6 10 322.6
VI Lunghezza braccio posteriore triangolo superiore 7 10 294.0
VII Distanza vertici triangoli inferiore e superiore 5 10 319.6
VIII Geometria porta mozzo (attacco sterzo-vertice inferiore) 5 15 225.7
IX Geometria porta mozzo (attacco sterzo-vertice superiore) 10 15 185.5
X Lunghezza push rod 19 21 348.1
XI Lunghezza braccio verticale bilanciere 19 b 70.0
XII Lunghezza braccio orizzontale bilanciere b c1c2 76.0
XIII Lunghezza perno bilanciere c1 c2 63.6
XIV Lunghezza ammortizzatore (Static set-up) a b 388.0
XV Lunghezza tirante sistema antirollio 27 31 510.0
Maserati MC12 Static Setup Parameters. Introduzione dati Tabella. 4.2.Coordinate dei punti descritti nello schema S.G.S.-2
Coordinate punti Sospensione Anteriore SX
Punto X Y Z 1 212.0 406.0 65.5 2 -100.0 398.0 79.0 5 5.3 799.5 94.9 15 119.1 787.4 289.5 44 87.8 465.0 255.4 D 0.0 866.1 -59.3 6 141.9 472.0 368.4 7 -104.2 472.0 368.4 10 -16.8 749.7 409.8 11 0.0 0.0 215.6 16 0.0 849.4 260.1 19 13.8 557.6 429.7 21 6.7 761.4 147.5 31 -46.5 15.8 499.8 27 -46.1 525.8 503.1 29 13.9 0.003 423.8 29P 20.8 0.1 423.8 a 13.8 120.0 475.8 b 13.8 507.9 479.0 c1 14.0 490.0 390.8 c2 -49.6 490.0 390.8 32 13.8 0.001 522.3
N.B. I dati evidenziati sono utilizzati solo se si analizza un pushrod
Regolazione lunghezza ammortizzatore anteriore (solo per sospensioni che utilizzano un push-rod) : Range: Iniziale 388.000 ; Finale 397.000 (possibile regolazione della lunghezza Δ=9.000 mm) Regolazione lunghezza puntone anteriore :
Cerni era a nteri ore trian gol o in feriore Cerni era p oste riore tria ngo lo i nferior e Attacco triang ol o infer iore p orta mozzo Cerni era a nteri ore trian gol o super iore Cerni era p oste riore tria ngo lo super iore Attacco triang ol o sup erior e po rta mozzo
Centro ruota Punto a terra c
entro ruota Ti rante sterzo l ato ruota Ti rante sterzo l ato ruota
Push rod lato bilanciere Push rod l
ato ruota sul tria
ng olo i nferior e Attacco monoammorti zzatore sul telaio Attacco monoammortizza tore sul bil anc iere
Attacco tirante sistema antir
oll io sul tel aio L EGENDA P
UNTI SOSPENSIONE ANTERIORE
SX 1 2 5 6 7 10 16 D 15 44 19 21 a b 31 Figura 4.8– R ilievo misu re sospen sione anteriore - top view
Cerni era a nteri ore trian gol o in feriore Cerni era p oste riore tria ngo lo i nferior e Attacco triang ol o infer iore p orta mozzo Cerni era a nteri ore trian gol o super iore Cerni era p oste riore tria ngo lo super iore Attacco triang ol o sup erior e po rta mozzo
Centro ruota Punto a terra c
entro ruota Ti rante sterzo l ato ruota Ti rante sterzo l ato telai o
Push rod lato bilanciere Push rod l
ato ruota sul tria
ng olo i nferior e Attacco monoammorti zzatore sul telaio Attacco monoammortizza tore sul bil anc iere
Attacco tirante sistema antir
oll io sul tel aio L EGENDA P
UNTI SOSPENSIONE ANTERIORE
SX
1 2 5 6 7 10 16 D 15 44 19 21 a b 31
Figura 4.9 –
Rilievo misure sosp
ensione anterio
Cerni era a nteri ore trian gol o in feriore Cerni era p oste riore tria ngo lo i nferior e Attacco triang ol o infer iore p orta mozzo Cerni era a nteri ore trian gol o super iore Cerni era p oste riore tria ngo lo super iore Attacco triang ol o sup erior e po rta mozzo
Centro ruota Punto a terra c
entro ruota Ti rante sterzo l ato ruota Ti rante sterzo l ato telai o
Push rod lato bilanciere Push rod l
ato ruota sul tria
ng olo i nferior e Attacco monoammorti zzatore sul telaio Attacco monoammortizza tore sul bil anc iere
Attacco tirante sistema antir
oll io sul tel aio L EGENDA P
UNTI SOSPENSIONE ANTERIORE
SX
1 2 5 6 7 10 16 D 15 44 19 21 a b 31
Figura 4.10 –
Rilievo misure sosp
ensione anterio
4.3 Descrizione del modello Wildfire 2.0 per lo studio della sospensione posteriore Per la realizzazione del modello cad si è partiti per analogia al paragrafo 4.2. dalle coordinate dei punti di fissaggio dei nodi caratteristici. I valori reali della sospensione posteriore sono mostrati nella tabella 4.3.
Figura 4.11. Modello cad sospensione posteriore.
Tabella 4.3 Dimensione Elementi Reali Misurati della Sospensione Posteriore.
Elem. Descrizione Elemento da a mm
I Interasse cerniere triangolo inferiore 1 2 360.5
II Lunghezza braccio anteriore triangolo inferiore 1 5 464.5
III Lunghezza braccio posteriore triangolo inferiore 2 5 494.4
IV Interasse cerniere triangolo superiore 6 7 200.1
V Lunghezza braccio anteriore triangolo superiore 6 10 268.9
VI Lunghezza braccio posteriore triangolo superiore 7 10 298.4
VII Distanza vertici triangoli inferiore e superiore 5 10 238.6
VIII Geometria porta mozzo (attacco sterzo-vertice inferiore) 5 15 176.8 IX Geometria porta mozzo (attacco sterzo-vertice superiore) 10 15 276.0
X Lunghezza push rod 19 21 359.0
XI Lunghezza braccio orizzontale bilanciere 19 b 74.9
XII Lunghezza braccio verticale bilanciere b c1c2 82.9
XIII Lunghezza perno bilanciere c1 c2 50.0
XIV Lunghezza monoammortizzatore a b 366.0
XV Lunghezza tirante sistema antirollio 27 31 474.0
Maserati MC12 Static Setup Parameters. Introduzione dati
Tabella. 4.4.Coordinate dei punti descritti nello schema S.G.S. - 2 Coordinate punti Sospensione Posteriore SX
Punto X Y Z 1 201.1 366.2 146.4 2 -151.5 294.1 127.9 5 -25.0 772.0 139.5 15 151.4 763.0 148.4 44 191.7 441.7 146.7 D 0.0 860.9 -80.1 6 105.0 481.0 358.0 7 -90.5 441.6 343.2 10 -5.0 726.0 372.8 11 0.0 0.0 249.2 16 0.0 854.8 264.1 19 -98.5 521.6 514.7 21 -83.7 748.0 236.4 31 -165.0 21.5 615.0 27 -158.5 495.4 609.1 29 -98.6 0.0 555.7 29P -108.0 0.1 555.7 a -98.5 120.0 581.5 b -98.5 486.0 580.7 c1 -98.4 444.5 484.2 c2 -148.5 444.5 484.2 32 -98.49 0.001 647.5
N.B. I dati evidenziati sono utilizzati solo se si analizza un pushrod; il tirante di convergenza è montato sul braccio inferiore
Regolazione lunghezza ammortizzatore posteriore (solo per sospensioni che utilizzano un push-rod) : Range: Iniziale 366.001 ; Finale 370.000 (possibile regolazione della lunghezza Δ=3.999 mm)
Regolazione lunghezza puntone posteriore : Range: Iniziale 359.033 ; Finale 368.000 (possibile regolazione della lunghezza Δ=8.967 mm)
Cerni era a nteri ore trian gol o in feriore Cerni era p oste riore tria ngo lo i nferior e Attacco triang ol o infer iore p orta mozzo Cerni era a nteri ore trian gol o super iore Cerni era p oste riore tria ngo lo super iore Attacco triang ol o sup erior e po rta mozzo
Centro ruota Punto a terra c
entro ruota Ti rante sterzo l ato ruota Ti rante sterzo l ato telai o
Push rod lato bilanciere Push rod l
ato ruota sul tria
ng olo i nferior e Attacco monoammorti zzatore sul telaio Attacco monoammortizza tore sul bil anc iere
Attacco tirante sistema antir
oll io sul tel aio L EGENDA P
UNTI SOSPENSIONE POSTERIORE
SX
1 2 5 6 7 10 16 D 15 44 19 21 a b 31
Figura 4.12 –
Rilievo misure sosp
Cerni era a nteri ore trian gol o in feriore Cerni era p oste riore tria ngo lo i nferior e Attacco triang ol o infer iore p orta mozzo Cerni era a nteri ore trian gol o super iore Cerni era p oste riore tria ngo lo super iore Attacco triang ol o sup erior e po rta mozzo
Centro ruota Punto a terra c
entro ruota Ti rante sterzo l ato ruota Ti rante sterzo l ato telai o
Push rod lato bilanciere Push rod l
ato ruota sul tria
ng olo i nferior e Attacco monoammorti zzatore sul telaio Attacco monoammortizza tore sul bil anc iere
Attacco tirante sistema antir
oll io sul tel aio L EGENDA P
UNTI SOSPENSIONE POSTERIORE
SX
1 2 5 6 7 10 16 D 15 44 19 21 a b 31
Figura 4.13 –
Rilievo misure sosp
ensione posteriore. Front vie
46 Cerni era a nteri ore trian gol o in feriore Cerni era p oste riore tria ngo lo i nferior e Attacco triang ol o infer iore p orta mozzo Cerni era a nteri ore trian gol o super iore Cerni era p oste riore tria ngo lo super iore Attacco triang ol o sup erior e po rta mozzo
Centro ruota Punto a terra c
entro ruota Ti rante sterzo l ato ruota Ti rante sterzo l ato telai o
Push rod lato bilanciere Push rod l
ato ruota sul tria
ng olo i nferior e Attacco monoammorti zzatore sul telaio Attacco monoammortizza tore sul bil anc iere
Attacco tirante sistema antir
oll io sul tel aio L EGENDA P
UNTI SOSPENSIONE POSTERIORE
SX
1 2 5 6 7 10 16 D 15 44 19 21 a b 31
Figura 4.14 –
Rilievo misure sosp
ensione anterio
47
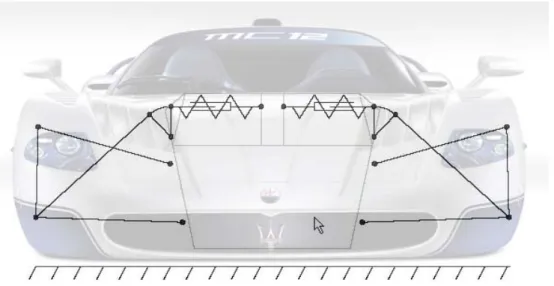
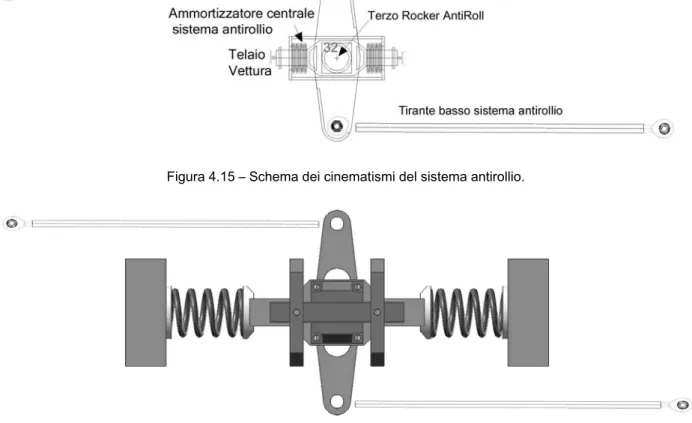
4.4 Descrizione del modello Wildfire 2.0 per lo schema del sistema antirollio Lo schema con cui è realizzato il sistema antirollio è molto semplice e geniale come soluzione, perché riesce in maniera molto semplice a svincolare la rigidezza a rollio della vettura dalla rigidezza allo scuotimento. E’ composto da un terzo bilanciere centrale costituito da una parte orizzontale montata fra cuscinetti, libera di ruotare intorno ad un asse verticale, che ha inoltre la possibilità di oscillare trasversalmente, intorno ad un asse parallelo all’asse X, individuato dai punti 29 e 29P, all’interno del telaietto di alluminio imbullonato sul telaio e viene precaricato da due ammortizzatori centrali fissati sul telaio. Il bilanciere centrale è collegato ai due tiranti, quello basso e quello alto che lo collegano ai due bilancieri (destro e sinistro) connessi ai puntoni della sospensione posizionati in parallelo agli ammortizzatori. Tutti insieme questi elementi realizzano il sistema antirollio descritto nelle figure 4.15 e 4.16.
Figura 4.15 – Schema dei cinematismi del sistema antirollio.
Figura 4.16 – Modello cad semplificato del sistema antirollio.
4.5 Analisi di varie geometrie Per poter ottimizzare la cinematica di ogni sottosistema ed il layout del veicolo ed al tempo stesso ottenere una legge lineare tra il movimento della cassa e la variazione di forza a terra, si sono studiate diverse configurazioni. A titolo di esempio si riportano alcune delle geometrie studiate.
48
• static set-up: in una analisi di tipo Statico ( denominata Static Generic) • travel wheel -±40mm per la sospensione anteriore- analisi cinematica • travel wheel -±40mm per la sospensione posteriore- analisi cinematica
4.6 Simulazioni Mechanism Design per l’analisi cinematica delle sospensioni Una serie di simulazioni è stata effettuata per validare il modello cinematico in ambiente Mechanism Design di ProEngineer Wildfire 2.0®. Ne ricordiamo qui alcune.
4.6.1 Analisi statica Per definire l’analisi si utilizza il comando Meccanismo(Mechanism)>Analisi(Analyses) in ambiente Mechanism Design. La statica come è noto è un ramo della meccanica che si occupa delle forze che agiscono su un corpo in equilibrio ( non si considera l’inerzia). Utilizzando questo tipo di analisi è possibile determinare lo stato di un meccanismo soggetto a una serie di forze conosciute. Mechanism Design cerca di individuare una configurazione in cui tutti i carichi e le forze presenti nel meccanismo siano in equilibrio oppure una in cui l’energia potenziale del sistema in oggetto sia uguale a zero. Questo tipo di analisi è molto semplice e pratica per stabilire velocemente la configurazione del sistema a riposo, poiché nei calcoli eseguiti non viene tenuto conto della velocità. Quando si esegue un’analisi statica, viene visualizzato un grafico dell’accelerazione al variare del numero di iterazioni che indica l’accelerazione massima delle entità del meccanismo. Durante il processo di calcolo dell’analisi, la visualizzazione grafica e quella del modello vengono modificate in base alle posizioni intermedie elaborate durante il calcolo. Quando l’accelerazione massima del meccanismo raggiunge il valore zero, la configurazione del meccanismo è statica. Tutte le misure calcolate sono relative ai tempi e alle posizioni finali del meccanismo e non è disponibile uno storico temporale per il processo di sistemazione.
4.6.2 Analisi cinematica Si può utilizzare il comando Meccanismo (Mechanism)> Analisi (Analyses) in ambiente Mechanism Design per definire l’analisi. La cinematica è un ramo della meccanica che si occupa degli aspetti del movimento dei corpi a prescindere dalla massa e dalle forze che generano il moto. Si utilizza una analisi cinematica per calcolare il movimento di un meccanismo basato su servomotori. E’
49
possibile utilizzare qualsiasi servomotore applicato ai Joint Axis (giunti di connessione) dotato di un profilo che generi una accelerazione finita. Un’analisi cinematica simula il movimento del meccanismo in base ai requisiti dei profili dei servomotori e alle caratteristiche dei Joint Axis. In un’analisi cinematica non vengono tenute in considerazione le forze, quindi non è possibile utilizzare le forze motrici e non è necessario specificare le proprietà di massa del meccanismo. Le entità dinamiche presenti eventualmente nel modello, ad esempio le molle, gli smorzatori, la gravità, le forze, le coppie e le forze motrici, non hanno alcuna influenza in un’analisi cinematica. In genere i servomotori hanno profili continui, ma se così non fosse, Mechanism Design tenta di renderlo continuo prima di eseguire un’analisi cinematica. Se il sistema non è in grado di rendere continuo il profilo, il motore non viene utilizzato per l’analisi.
4.7 Principali parametri caratteristici I parametri oggetto delle misurazioni sono elencati di seguito. Solo alcuni saranno analizzati nel dettaglio perché molto rilevante ai fini della guidabilità è la loro variazione in funzione dell’escursione della ruota e dell’angolo di sterzo.
• Variazione angoli di Camber-Caster-Kingpin (col movimento verticale del veicolo) molti progettisti verificano la variazione anche con la rotazione dello sterzo. • Variazione della convergenza Toe-in, divergenza Toe-out .
• Variazione avancorsa (BTL o Caster Trail) e scrub radius ( BTT o offset). • Variazione delle semicarreggiate .
• Variazione corsa ammortizzatore ( verificare se varia o meno linearmente con l’affondamento).
• Lunghezza triangolo superiore sosp ant. • Lunghezza triangolo inferiore sosp ant. • Lunghezza triangolo superiore sosp post. • Lunghezza triangolo inferiore sosp post. • Inclinazione triangolo superiore sosp ant. • Inclinazione triangolo inferiore sosp ant. • Inclinazione triangolo superiore sosp post. • Inclinazione triangolo inferiore sosp post.
50
4.7.1 Risultati delle misurazioni Le misurazioni possono aiutare a comprendere e analizzare i risultati del movimento di un meccanismo e fornire informazioni utili per migliorarne la progettazione. Prima di poter calcolare e visualizzare i risultati delle misurazioni in Mechanism Design, bisogna aver eseguito o salvato e ripristinato i risultati di una o più analisi del meccanismo in Mechanism Design. E’ possibile creare i seguenti tipi di misure:
• Misure di posizione, di separazione della distanza, di velocità, di accelerazione o di camma in Mechanism Design mediante la finestra di dialogo Misura risultati (Measure Results). E’ possibile creare anche misure di sistema e dei corpi che non necessitano di una definizione della massa, tipo parti ( skeleton-schema modello) costituite solo da assi e punti.
• In Mechanism Design Option, è possibile creare diversi tipi di misure dinamiche utilizzando la finestra di dialogo Misura risultati (Measure Results)
• Feature di misurazione di analisi mediante il comando Analisi (Analysis)>Misura (Measure). Le analisi di misurazione delle distanze e degli angoli sono i tipi di analisi di riferimento più utili per riprodurre graficamente i risultati delle misure in Mechanism Design.
Le misure create in Mechanism Design sono utilizzate come parametri per l’esecuzione di analisi di movimento mediante BMX (Behavioral Modeling Extension). E’ possibile rappresentare graficamente i risultati di una misurazione per una o più analisi specifiche di Mechanism Design. Si può anche recuperare un file dei risultati salvati, salvare i risultati della misurazione in un file di tabella o anche stamparli. Normalmente è più efficiente creare misure prima di eseguire un’analisi. Le misure create dopo l’esecuzione di un’analisi richiedono un tempo maggiore, poiché prima di creare il grafico è necessario calcolare le valutazioni. La rappresentazione grafica consente di effettuare il plottaggio di una misura in funzione del tempo o rispetto a un’altra misura. Si ha anche la possibilità di creare un grafico che visualizzi più curve di misurazione per un insieme di risultati d analisi oppure esaminare la variazione di una sola misura con più insiemi di risultati. Infine si possono rappresentare graficamente più misurazioni eseguendo più analisi.
51
per ciascun tipo di analisi in ambiente Mechanism Design di ProEngineer WildFire 2.0 .
Analisi Misure
Cinematica Posizione, velocità, accelerazione Separazione (Interferenza ) FEATURE PRO/ENGINEER Gradi di libertà Ridondanze Tempo Distanza
Orientamento dei corpi
Velocità e accelerazione angolare dei corpi
Statica Posizione (Position)
Reazione di connessione Tutte le misure di sistema Tutte le misure dei corpi FEATURE PRO/ENGINEER
Assieme ripetuto
NB. nelle Release precedenti
veniva chiamata KINEMATIC ANALYSIS
Posizione (Position) Separazione (distanza) Gradi di libertà Ridondanze Tempo
Orientamento dei corpi
Velocità e accelerazione angolare dei corpi FEATURE PRO/ENGINEER
4.9 Simulazione dello scuotimento Per simulare lo scuotimento è stato aggiunto un servo motor tra il punto D del porta mozzo e la strada ed è stato imposto un movimento verticale (in funzione del tempo) in modo da far muovere la ruota per tutta l’escursione utile degli ammortizzatori. Uno scuotimento di ±40 mm è ragionevole viste le contenute
52
altezze da terra dell’avantreno e del posteriore. Per poter stabilire un riferimento per le analisi cinematiche, si sono creati dei piani orizzontali paralleli al terreno; a questi è stato dato un certo offset per poter impostare la posizione iniziale delle simulazioni. Da queste poi sono stati catturati degli Snapshot che sono stati utilizzati poi per fissare le condizioni iniziali (INITIAL CONDITIONS) delle analisi.
4.10 Simulazione della sterzata E’ possibile inoltre analizzare la legge di sterzata e come variano tutti gli angoli caratteristici al variare della rotazione dello sterzo, mediante la variazione della coordinata Y dei punti 44 -15 del tirante di sterzo. Il modello, in continuo aggiornamento durante il tirocinio in Maserati, è risultato alla fine essere composto da 45 corpi e 84 vincoli di vario tipo.
4.11 Risultati ottenuti Tale modello è stato via via sviluppato per ottenere ogni tipo di informazione necessaria alla verifica della cinematica del sistema. Lavorando così sul modello di calcolo parametrico è stato possibile adeguare il sistema a tutte le specifiche richieste del Reparto Corse. Tutti i dettagli sul modello e le entità presenti sono mostrati nell’appendice C.