Capitolo 2
Definizione dello scenario e simulazione dei campioni del
segnale ricevuto
Il progetto CLEARAD è rivolto alla simulazione e alla produzione di un on-vehicle long-range radar con funzionalità estese alla rivelazione e al tracking dei bersagli su percorso extraurbano. La funzione principale del sistema è quella del “Collision Warning”. Lo scopo è di garantire una riduzione della probabilità d’impatto frontale delle autovetture con particolare riferimento alle condizioni di limitata visibilità per il conducente.
Figura 2.2: Diagrammi di radiazione e funzionalità per sistemi di sensori di tipo short e long range.
La valutazione delle prestazioni di un radar è notevolmente semplificata dalla disponibilità di un accurato modello matematico dell’apparato e dell’ambiente nel quale esso dovrà operare. La simulazione software dello scenario, delle caratteristiche geometriche e cinematiche dei bersagli - e dell’intera fase di elaborazione introdotta dal dispositivo - costituisce uno strumento flessibile ed economico per indagare, in dettaglio, sulle caratteristiche di ciascun sottosistema.
Le espressioni dei campioni ricevuti sono esplicitate in funzione delle RCS misurate per bersagli e clutter. Il modello dello scenario, che include la caratterizzazione del beampattern desiderato per l’antenna del sistema CLEARAD e della cinematica dei target e dei clutter patch, viene completamente caratterizzato, allo scopo di valutare le prestazioni del sistema simulato in un insieme di possibili condizioni operative.
Il presente capitolo definisce la struttura, le funzioni e le caratteristiche del programma ECOSIM che ha lo scopo di generare lo scenario simulato per testare le funzionalità e l’efficienza del sistema CLEARAD in condizioni analoghe a quelle operative.
Inoltre, viene presentata la definizione dello scenario relativo ad un sistema radar animato da un moto rettilineo uniforme o uniformemente accelerato, la tipologia e
l’espressione del segnale trasmesso – che utilizza una codifica di Barker di ordine 7 – ed infine viene determinata l’espressione dei campioni dei segnali ricevuti dal clutter e dai bersagli e presenta la struttura del programma ECOSIM.
2.1
Beampattern dell’antenna per il sistema radar CLEARAD
In questo paragrafo si descrivono le caratteristiche desiderate per il sistema radiante del CLEARAD. Si fa l’ipotesi che l’antenna, in ricezione, utilizzi due subarray con i rispettivi beampattern orientati in due direzioni separate dall’angolo di squint, ψ , per ottenere due fasci simultanei e parzialmente sovrapposti (vedi Figura 2.3).
Figura 2.3: Rappresentazione dei beampattern in azimuth separati dell’angolo di squint ed utilizzati per la tecnica monopulse.
Si fa riferimento ad un diagramma di radiazione la cui apertura a -3 dB occupa l’intervallo [-10°, +10°]. L’apertura del fascio può essere modificata in funzione delle dimensioni caratteristiche dell’array (del numero degli elementi e dell’interelement spacing) e dello squint angle.
Il simulatore ECOSIM permette la modifica di tali parametri con riferimento ad un array planare e di forma rettangolare. In Figura 2.5 si rappresentano i beampattern
normalizzati relativi all’array rettangolare costituito da due righe di elementi e
rappresentato in
30
N =
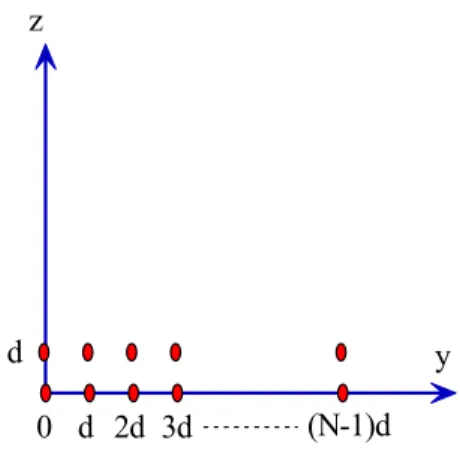
y 0 d 2d 3d (N-1)d z d
Figura 2.4: Array costituito da due righe di N elementi sul piano yz.
La spaziatura tra due elementi adiacenti è 1.960[mm]
2
d =λ = (interelement spacing)
sui due assi y e z. Tutti gli elementi hanno un diagramma di radiazione del tipo a coseno quadrato:
( )
cos2( )
g θ = θ (2.1) Il calcolo è stato effettuato solo sul piano orizzontale (piano xy) e per un azimut
45 θ 45
− ° ≤ ≤ ° rispetto al broadside. L’angolo di squint è ψ = : il beamsteering del 4
subarray formato dalla riga superiore è, rispetto al broadside, in direzione , il beamsteering della riga inferiore avviene per
(
θ =2 ,φ =0)
(
θ = −2 ,φ =0)
.Figura 2.5: Rappresentazione dei beampattern dopo il beamsteering in direzione +2° e -2° (angolo di squint 4°).
La Figura 2.6 rappresenta i fasci (normalizzati) somma (Σ ) e differenza ( ). La Δ Figura 2.7 e la Figura 2.8 mostrano i risultati ottenuti utilizzando una finestra di Blackman di
ordine per lo shading dei beampattern sulle due righe. Dalle immagini risulta
evidente l’attenuazione dei lobi laterali ed il corrispondente allargamento del lobo principale.
30
N =
Figura 2.6: Beampattern normalizzati per i fasci somma e differenza.
Figura 2.7: Rappresentazione dei beampattern dopo lo shading con una finestra di Blackman (N=30, angolo di squint 4°).
Figura 2.8: Beampattern normalizzati per i fasci somma e differenza dopo lo shading con una finestra di Blackman (N=30, angolo di squint 4°).
La definizione di array planari (composti da più linee lungo l’asse z) - che permettono il controllo dell’apertura del beampattern anche sul piano x-z (angolo di elevazione) – è importante per la riduzione delle ampiezze degli echi prodotti
- dalla segnaletica verticale, - dalla segnaletica luminosa, - dai cavalcavia,
- dai raccordi verticali convessi (passaggio da un tratto in salita ad un tratto in discesa), - dai raccordi verticali concavi (passaggio da un tratto in discesa ad un tratto in salita),
dalle gallerie o trafori.
Il programma ECOSIM permette di definire i parametri • d (interelement spacing),
• N (numero di elementi per ciascuna riga),
• g
( )
ϕ (diagramma di radiazione in potenza per ciascun elemento dell’array),• θ (squint angle) e
• Nrighe (numero di righe dell’array).
Il numero delle righe, , assume un valore pari per ottenere una ripartizione
simmetrica dei subarray destinati ad alimentare i canali
righe
N
Σ e Δ in ricezione. Nei
base relativi al beamforming ed allo shading del beampattern. Le tecniche considerate saranno quindi applicate alla definizione del beampattern per un automotive radar ed alla determinazione dei campioni del segnale ricevuto.
2.2
Array lineare, broadside beam
Si consideri inizialmente un array lineare di elementi uniformemente spaziati (uniform linear array, ULA), come quello costituito dagli elementi sulla riga inferiore in Figura 2.4. Si ipotizza che l’onda elettromagnetica si propaghi in un mezzo omogeneo, che vi sia un’unica sorgente del segnale in campo lontano, e che ciascun ricevitore sia ideale (si lavora in assenza di rumore). In queste condizioni il segnale che raggiunge l’array è un’onda piana.
Si consideri, ad esempio, un’onda piana a frequenza f (ma le stesse considerazioni
possono essere estese ai segnali a banda stretta) che si sposta verso l’array da una direzione individuata dagli angoli di azimut e di elevazione - in questo caso indicati rispettivamente come e θs Φs - come rappresentato in Figura 2.9.
Figura 2.9: Rappresentazione di un’onda piana che si sposta verso l’array da una direzione individuata dagli angoli di azimut e di elevazione θs e Φs.
L’istante al quale l’onda piana raggiunge il punto x u y z ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦
è dato dal rapporto ds
c ,
c è la velocità di propagazione nel mezzo considerato (si assume 3 108
[ ]
c= ⋅ m s )
ds =xcos
( ) ( )
θs sin φs +ysin( ) ( )
θs sin φs +zcos( )
φs (2.2)Si definisce cos sin 2 sin sin cos s s s s s s k θ φ π θ φ λ φ ⎡ ⎤ ⎢ = ⎢ ⎢ ⎥ ⎣ ⎦ ⎥ ⎥ , (2.3) dove λ è la lunghezza d’onda. Si ha allora
T 2
[
cos sin sin sin cos]
2 ss s s s s s x d k u y z π π θ φ θ φ φ λ λ ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥= ⎢ ⎥ ⎣ ⎦ . (2.4) Il modello matematico dell’onda piana ha espressione
( )
, exp{
(
T)
}
s
f t u = ⋅α j ωt+k u , (2.5) Dove ω=2 fπ e ks è il vettore d’onda del segnale (signal wavevector).
Si indicano con 2 , 1, , righe j j j j N K N x u y j z = × ⎡ ⎤ ⎢ ⎥ =⎢ ⎥ = ⎢ ⎥ ⎣ ⎦ … K , (2.6)
rispettivamente il numero degli elementi e le coordinate del j-esimo elemento del subarray
⊗
1/N+
⊗
1/N⊗
1/N⊗
1/N(
0, ,)
y θ θ t N x 1 x 2 x 3 x Fr ont e d' ond aCome rappresentato in Figura 2.10, i segnali in arrivo dagli N ricevitori vengono sommati dopo essere stati moltiplicati per il fattore 1 N . I segnali che arrivano dalla direzione ortogonale all’antenna (broadside) si sommano in fase determinando un massimo per il segnale
y
(
θ θ0, ,t)
. (2.7) Nella (2.7):• θ0 indica la direzione di steering (in questo caso il broadside); • θ indica la direzione di arrivo dell’onda piana.
I segnali che arrivano da direzioni diverse dal broadside non si sommano in fase e il segnale di uscita assume valori minori rispetto al valore massimo.
L’esempio riportato in Figura 2.10 si riferisce ad una tecnica di beamforming convenzionale: il sistema è anche noto con il nome di add-squarer. Il segnale di uscita corrispondente è detto broadside beam.
In questo paragrafo si assume che tutti i ricevitori siano omnidirezionali (diagramma di radiazione sferico), identici tra loro e che la geometria del sistema sia perfettamente nota. I risultati sono riferiti a segnali di tipo onda piana, ma possono essere considerati validi anche per segnali a banda stretta.
Sia x tn
( )
il segnale di uscita dal j-esimo ricevitore, il broadside beam è
( )
( )
. (2.8) 1 N n n y t x t = =∑
Le coordinate dell’n-esimo elemento del subarray lineare sono
(
)
, (2.9) 0 1 0 n u n d ⎡ ⎤ ⎢ =⎢ − ⎢ ⎥ ⎣ ⎦ ⎥ ⎥y x 0 d 2d 3d (N-1)d Fronte d'onda θs
Figura 2.11: ULA di N elementi, interelement spacing d, direzione di arrivo dell’onda elettromagnetica incidente θs.
Si determina inizialmente la risposta dell’array ad un segnale sinusoidale di tipo onda piana che arriva da una direzione θs sul piano orizzontale (φs =90 ) (vedi Figura 2.11). Il segnale in uscita dall’n-esimo ricevitore è
(
,) ( )
exp(
T)
n s s n
s t θ =s t ⋅ ik u , (2.10) dove s t
( )
=exp( )
i tω è il segnale di uscita dl primo ricevitore (collocato nell’origine). Sostituendo( )
( )
cos 2 sin 0 s s k s θ π θ λ ⎡ ⎤ ⎢ = ⎢ ⎢ ⎥ ⎣ ⎦ ⎥ ⎥, (2.11) si ottiene(
,) ( )
exp 2(
1)
sin( )
s n s i n d s t θ s t π θ λ − ⎛ ⎞ = ⋅ ⎜− ⎝ ⎠⎟ . (2.12)Il segnale che arriva dall’n-esimo ricevitore è
(
n 1)
dsin( )
sc
θ
−
secondi in anticipo rispetto a quello in uscita dal ricevitore nell’origine.
Sia exp i2 dsin
( )
s z π θ λ ⎛ ⎞ = ⎜ ⎝ ⎠⎟ (2.13)( )
exp 2(
1)
sin( )
s n 1 n s i n d v θ π θ λ z − − ⎛ ⎞ = ⎜− = ⎝ ⎠⎟)
(2.14) Si ottiene allora(
,) ( ) (
n s n s s t θ =s t ⋅v θ (2.15)La (2.15) mostra che, per segnali a banda stretta, il segnale s tn
(
,θs)
può esserescomposto nel prodotto di due fattori: la forma d’onda s t
( )
ed un fattore di fase (spatial phase factor). Utilizzando la notazione vettoriale si ottiene:(
, s) ( ) (
s)
s tθ =s t ⋅v θ (2.16) Il vettore v
( )
θs che compare nella (2.16) è anche detto vettore di steering:( ) ( ) ( ) ( ) ( ) 1 2 exp sin 2 exp 2 sin 2 exp 1 sin s s s s i d i v d i N d π θ λ π θ θ λ π θ λ ⎡ ⎤ ⎢ ⎛ ⎞ ⎥ ⎢ ⎜ ⎟ ⎥ ⎢ ⎝ ⎠ ⎥ ⎢ ⎛ ⎢ ⎥ = ⎜ ⎟ ⎢ ⎝ ⎠ ⎥ ⎢ ⎥ ⎢ ⎥ ⎢ ⎛ ⎞⎥ − ⎢ ⎜ ⎟⎥ ⎝ ⎠ ⎣ ⎦ ⎥ ⎞ . (2.17)
In questa analisi semplificata, in assenza di rumore e con un’unica sorgente di segnale, l’uscita del broadside beamformer può essere scritta nella forma y
(
0, ,θs t)
: il pedice sindica la direzione di provenienza del segnale, lo 0 indica il broadside. Calcolando la somma dei segnali ricevuti dai singoli elementi dell’array si ha
(
)
(
)
( )
(
2 1 1 1 0, , , 1 N N s n s n y t s t s t z z z N N θ θ − = =∑
= + + + + 1)
(2.18)Dopo semplici passaggi, ed utilizzando la formula della somma di una serie geometrica, si ottiene
(
)
( )
(
)
( )
( )
( )
sin sin 1 1 0, , exp sin sin sin s s s s N d i N d y t s t d N π θ π λ θ θ π λ θ λ ⎛ ⎛ ⎞⎞ ⎜ ⎟ ⎜ ⎟ − ⎛ ⎞⎜ ⎝ = ⎜ ⎟ ⎛ ⎞ ⎜ ⎟ ⎝ ⎠⎜ ⎜ ⎟ ⎟ ⎝ ⎠ ⎝ ⎠ ⎠ ⎟ . (2.19) La potenza istantanea in uscita risulta(
)
( )
( )
( )
2 2 2 1 sin sin 0, , sin sin s s s N d y t s t d N π θ λ θ π θ λ ⎛ ⎛ ⎞⎞ ⎜ ⎟ ⎜ ⎝ ⎟ ⎜ = ⋅ ⎛ ⎞ ⎜ ⎟ ⎜ ⎟ ⎜ ⎝ ⎠ ⎟ ⎝ ⎠ ⎠ ⎟ . (2.20)Si osserva che y
(
0,0,t)
2 = s t( )
2. Il secondo fattore della (2.20) è indipendente dalla forma d’onda del segnale trasmesso. Tale fattore, normalizzato ad un valore unitario per0
s
θ = , è detto il beampattern dell’array e descrive completamente la risposta dell’array
lineare “broadside beamformer” in funzione della direzione d’arrivo θs:
(
)
(
)
(
)
( )
( )
2 2 2 2 sin sin 0, , 1 0, 0,0, sin sin s s s s N d y t P d N y t π θ θ λ θ π θ λ ⎛ ⎛ ⎞⎞ ⎜ ⎟ ⎜ ⎝ ⎟ ⎜ = = ⎛ ⎞ ⎜ ⎟ ⎜ ⎟ ⎜ ⎝ ⎠ ⎟ ⎝ ⎠ ⎠ ⎟ . (2.21) La (2.21) può essere semplificata osservando che( )
s 2 sin( ) ( )
s cos 0 y k π θ λ = , (2.22) e quindi(
)
( )
( )
2 2 sin 1 2 0, sin 2 s y s s y Nd k P d N k θ ⎛ ⎛ ⎞⎞ ⎜ ⎟ ⎜ ⎝ ⎟ ⎜ = ⎛ ⎞ ⎜ ⎟ ⎜ ⎟ ⎜ ⎝ ⎠ ⎟ ⎝ ⎠ ⎠ ⎟ . (2.23) Nella (2.22) con( )
s yk si indica la componente del vettore d’onda lungo l’asse
dell’array.
Infine, utilizzando la notazione vettoriale si ha:
(
)
( ) ( )
2 2 1 0, H 0 s P v v N s θ = θ , (2.24) Dove l’indice “H” indica il complesso coniugato trasposto (l’Hermitiano) di un vettore e( )
1 1 0 1 1 v ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ . (2.25)La Figura 2.12 rappresenta il beampattern del broadside beamformer costituito da elementi.
30
Figura 2.12: Beampattern del broadside beamformer costituito da N=30 elementi.
Le relazioni precedenti possono essere facilmente estese al caso del beamsteering in una direzione generica, ad ogni possibile direzione di arrivo del segnale e ad una qualsiasi configurazione dell’array.
2.3
Array lineare, beamsteering
Si supponga di voler ricevere un segnale da una direzione θ sul piano orizzontale
diversa dal broadside, e che non sia possibile ruotare fisicamente l’antenna. Il segnale (onda piana) raggiunge gli elementi dell’array ad istanti diversi (come evidenziato anche nella
(
φ =90)
Figura 2.11). Ritardando opportunamente le uscite di ciascun ricevitore prima di sommarle è possibile compensare tali ritardi e massimizzare l’uscita del sistema relativamente alla direzione di arrivo considerata.
Tale processo è anche noto col nome di beamsteering e la generica direzione
(
θ φ,)
èdetta beamsteered direction.
Per i segnali a banda stretta, i ritardi nel tempo equivalgono a ritardi di fase. Pertanto, invece di ritardare le uscite dei canali dell’array, è possibile moltiplicarle per opportuni fattori di fase prima di calcolarne la somma. Tale tecnica di formazione del fascio è anche detta phase shift beamforming.
)
Il segnale di uscita, y
(
θ,t , ha espressione( )
( )
(
)
( )
( ) ( )
1 1 1 , exp 2 1 sin N H n n d y t x t j n v x t N N θ π θ λ = ⎛ ⎞ = ⎜− − ⎟= ⎝ ⎠∑
θ . (2.26)Quando il segnale raggiunge l’antenna dalla direzione θs ed il beamsteering è nella
direzioneθ, l’uscita dell’array subisce un phase shift dovuto al ritardo di propagazione
(relativo alla direzione θs) ed un ritardo di fase prodotto dallo phase shift beamforming (relativo alla direzione θ).
Il segnale rappresenta l’uscita del sistema all’istante t, per un beamsteering
effettuato in direzione
(
, ,sy θ θ t
)
θ e per un’onda piana incidente sull’array dalla direzione θs.
Il vettore delle uscite dagli N canali dell’array in ricezione è dato da
( ) ( ) ( )
s x t =s t ⋅v θ , (2.27) e quindi(
)
( ) ( ) ( )
( )
(
)
( )
( )
1 1 1, , H N exp 2 1 sin sin
s s s n d y t s t v v s t j n N N θ θ θ θ π θ θ λ = ⎧ ⎫ = = ⎨ − ⎡⎣ − ⎤⎦⎬ ⎩ ⎭
∑
(2.28)Il beampattern normalizzato assume l’espressione
(
)
(
( )
( )
)
( )
( )
(
)
2
2
sin sin sin
1 ,
sin sin sin
s s s N d P d N π θ θ λ θ θ π θ θ λ ⎛ ⎡ − ⎤⎞ ⎜ ⎢⎣ ⎥⎦⎟ ⎜ = ⎡ ⎤ ⎜ − ⎟ ⎜ ⎢⎣ ⎥⎦ ⎟ ⎝ ⎠ ⎟ (2.29)
La Figura 2.13 rappresenta il beampattern per un array di N =30 elementi con
Figura 2.13: Beampattern per un array di N=30 elementi, direzione di beamsteering θ =20 .
2.4 Beampattern per array di forma generica e per una qualunque
direzione di steering
Se si correggono i ritardi sperimentati dal segnale per raggiungere i diversi elementi dell’array, le tecniche di beamsteering possono essere estese ad array di forma arbitraria. Considerando ancora una singola onda piana (o un segnale a banda stretta), i ritardi temporali possono essere compensati con opportuni sfasamenti sui campioni dell’inviluppo complesso per ciascun canale in ricezione.
Per la direzione di beamsteering
(
θ φ,)
in azimut e in elevazione, i ritardi di fase sonoespressi dalle relazioni T , dove
n k u
( ) ( )
( ) ( )
( )
cos sin 2 sin sin cos k θ φ π θ φ λ φ ⎡ ⎤ ⎢ = ⎢ ⎢ ⎥ ⎣ ⎦ ⎥ ⎥ (2.30) n n n n x u y z ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ . (2.31)e con n n n x y z ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦
si indicano le coordinate dell’n-esimo ricevitore, n= …1, ,N.
Il segnale di uscita, noto anche come output beam, y k t , è dato da
( )
,( )
( )
(
)
( )
( )
1 1 1 , N exp T H n n n y k t x t jk u v k x t N = N =∑
− = , (2.32)e il vettore di steering ha espressione
( )
(
)
(
)
(
)
1 2 exp exp exp T T T N jk u jk u v k jk u ⎡ ⎤ ⎢ ⎥ ⎢ ⎥ ⎢ = ⎢ ⎥ ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ ⎥. (2.33)L’espressione del beampattern può ottenersi in funzione dell’uscita del beamformer quando il segnale di ingresso è un’onda piana la cui direzione di arrivo è specificata dal vettore ks.
Il vettore dei segnali ricevuti è
( ) ( )
( )
sx t =s t v k . (2.34) Sostituendo la (2.34) nella (2.32) si ottiene
(
)
( )
( ) ( )
( )
(
) (
)
( )
(
)
1 1 1 , , 1 1exp exp exp
H s s N N T T T T n s n s n n y k k t s t v k v k N s t jk u jk u s t j k k u N = N = = = n ⎡ ⎤ =
∑
− =∑
⎣ − ⎦ . (2.35)L’espressione del beampattern (normalizzato) risulta infine
( ) (
)
(
)
( ) ( )
(
)
2 2 2 1 2 2 2 exp , , , , , N T T H s n s s n s j k k u y k k t v k v k P k k N N y k k t = ⎡ − ⎤ ⎣ ⎦ = = =∑
. (2.36)Il beampattern è una superficie tridimensionale espressa in funzione degli angoli θ e φ . La geometria dell’array deve essere scelta in funzione dei seguenti parametri:
- angolo di apertura in azimut, - angolo di apertura in elevazione, - guadagno.
La Figura 2.15 e la figura 2.16 rappresentano il beampattern normalizzato per un array
di trenta righe composte ciascuna di trenta elementi: Nr =N =30 (Beam steered
broadside). Per la riduzione dei lobi laterali si è utilizzata una finestra di Blackman 2-D. La Figura 2.17 e la Figura 2.18 rappresentano il risultato del Beamsteering 2-D in direzione
(
θ = −15 ,φ =110)
.Figura 2.15: Beampattern normalizzato per un array di trenta righe e trenta colonne (Beam steered broadside). Per la riduzione dei lobi laterali si è utilizzata una finestra di Blackman 2-D.
Figura 2.16: Beampattern normalizzato per un array di trenta righe e trenta colonne (Beam steered broadside). Per la riduzione dei lobi laterali si è utilizzata una finestra di Blackman 2-D.
Figura 2.17: Beampattern normalizzato per un array di trenta righe e trenta colonne (Beam steered in direzione
(
θ = −15 ,φ =110)
). Per la riduzione dei lobi laterali si è utilizzata una finestra diBlackman 2-D.
Figura 2.18: Beampattern normalizzato per un array di trenta righe e trenta colonne (Beam steered in direzione
(
θ = −15 ,φ =110)
). Per la riduzione dei lobi laterali si è utilizzata una finestra di2.5
Beampattern di array di ricevitori non omnidirezionali
I risultati ottenuti nei paragrafi precedenti si riferiscono ad array di elementi caratterizzati da diagrammi di radiazione con simmetria sferica.
Nelle antenne reali si utilizzano spesso array di ricevitori non omnidirezionali e l’espressione del beampattern risulta modificata. In Figura si rappresentano i beampattern (broadside beam) per due ULA con ricevitori caratterizzati dallo stesso
numero di elementi, , e dallo stesso interelement spacing d. Si utilizzano
ricevitori omnidirezionali per il primo array e ricevitori con un diagramma di radiazione del tipo a coseno quadrato per il secondo.
30
N =
Si consideri il beampattern di un array di N ricevitori identici e direzionali e sia
( )
rec s s
A k la risposta complessa di ogni ricevitore ad un segnale corrispondente al vettore
numero d’onda ks. Il vettore delle uscite dei ricevitori relativo ad un’onda piana che si propaga verso l’array dalla direzione ks è allora
( ) ( )
rec( ) ( )
s s s
x t =s t A k v k . (2.37) Se si introduce una operazione di beamsteering nella direzione k , l’uscita risulta
( )
1( )
rec( ) ( ) ( )
Hs s
y t s t A k v k v k
N
= s . (2.38)
Il beampattern normalizzato dell’array direzionale è quindi
( )
( ) ( )
( )
( )
( )
(
2 2 2 2 , , H rec s s sdir omni rec ,
)
s s s s rec s v k v k A k P k k P k k P k k N A k = ⋅ = ⋅ s . (2.39)
La relazione (2.39) rappresenta il principio della moltiplicazione dei beampattern.
Il beampattern di un array di identici ricevitori direzionali è il prodotto del beampattern di un array di ricevitori omnidirezionali, con la stessa geometria, con il beampattern dei suoi ricevitori.
L’attenuazione dei lobi laterali evidenziata in Figura può consentire, ad esempio, un incremento della direttività dell’antenna ed una contemporanea riduzione del fenomeno
dei grating lobes per interelement spacing 1
2 d ≥ .
Una diversa applicazione, che può risultare di maggiore utilità nella progettazione del sistema radiante del CLEARAD, consiste nella possibile riduzione del numero degli elementi dell’array. A tale scopo è sufficiente impiegare più ricevitori che presentano un diagramma di radiazione uguale a quello di un sottoinsieme di elementi omnidirezionali.
Ad esempio, un array di otto righe con trenta elementi omnidirezionali su ciascuna riga può essere sostituito:
- da un array equivalente di due righe di trenta elementi direzionali, ciascuno con un diagramma di radiazione equivalente a quello che caratterizza una colonna di quattro elementi omnidirezionali;
- da un array equivalente di due righe di dieci elementi direzionali, ciascuno con un diagramma di radiazione equivalente a quello che caratterizza un sottoinsieme di elementi omnidirezionali costituito da quattro righe e tre colonne.
Figura 2.19: Rappresentazione dei beampattern (broadside beam) per due ULA con ricevitori caratterizzati dallo stesso numero di elementi, N =30, e dallo stesso interelement spacing d. Si utilizzano ricevitori omnidirezionali per il primo array e ricevitori con un diagramma di radiazione
2.6 Considerazioni sulla definizione del Beampattern del sistema
CLEARAD e sulle tecniche di realizzazione dell’antenna
Per un automotive radar, la degradazione delle prestazioni in presenza di un elevato numero di bersagli può essere contenuta solo in parte impiegando tecniche adattive di calcolo della soglia (CFAR). Gli echi prodotti dai bersagli indesiderati, come i guard rail e i cartelli per la segnaletica verticale posti ai lati della carreggiata, eventuali alberi ed edifici posti in prossimità della sede stradale, i cavalcavia, la segnaletica luminosa e gli ingressi delle gallerie e dei trafori, costituiscono un limite imposto alle prestazioni degli algoritmi di signal processing. Gli effetti prodotti da tali interferenti, comunemente indicati nella terminologia radar come clutter discrete and sidelobe targets, devono essere attenuati applicando tecniche mirate ed efficienti di array processing.
La progettazione dell’array e la conseguente definizione del beampattern deve tener conto delle considerazioni riportate di seguito.
- Il guadagno massimo è imposto dalla distanza massima prevista .
( )
max( )
180 m ≤D ≤200 m
- La direzione di massima irradiazione
(
θmax,φmax)
può differire dal broadside perridurre il clutter di superficie. Ad esempio, se l’angolo di apertura del fascio in elevazione risulta pari a 5°, una direzione
(
θmax = °90 ,φmax = °87 .5)
riduce gli effetti del clutter di asfalto sul segnale in ricezione.- Il livello dei lobi laterali deve essere limitato adottando le consuete tecniche di shading del beampattern (nelle pagine precedenti si è utilizzata una finestra di Blackman). - Il diagramma di radiazione dei singoli elementi dell’array deve essere scelto in modo da minimizzarne il numero, prevenire il fenomeno dei grating lobes e ridurre la complessità realizzativa del sistema radiante.
- Si deve tener conto che le tecniche di shading riducono l’ampiezza dei lobi laterali ma allargano il lobo principale e diminuiscono il guadagno nella direzione di massima irradiazione.
- Gli effetti prodotti dalla presenza di ponti stradali, cavalcavia o viadotti sul segnale ricevuto possono essere contenuti impiegando le ben note tecniche di null steering e di notch widening relativamente alle direzioni di arrivo previste.
di un’autovettura o di un furgone è di solito inferiore ai 2 metri. La Figura mostra la distanza alla quale il fascio in elevazione, con apertura Δφ gradi e direzione di massima
irradiazione max 90 , max 90
2 φ θ φ Δ ⎛ = ° = ° − ⎜ ⎝ ⎠ ⎞
⎟, illumina un bersaglio posto ad un’altezza h.
Figura 2.20: Distanza minima di rilevazione delle quote h=2 metri e h=4 metri per un’apertura in elevazione Δφel ed una direzione di massima irradiazione
(
θmax = °90 ,φmax = ° − Δ90 φel 2)
.Se si sceglie un Δφel <2.29°, la presenza di ostacoli posti alla quota minima di 4 metri non è rilevata dal lobo principale per distanze inferiori ai 100 metri, mentre l’intera superficie del bersaglio alto 2 metri cade nel lobo principale per distanze maggiori di 50
metri. Se si sceglie un Δφel ≥2.29°, le tecniche di null steering e di notch widening
2.7
Generazione dei campioni ricevuti per bersagli e clutter
Nei radar ad impulsi la risoluzione in distanza dipende dalla durata dell’impulso trasmesso:
2
p
cT R
Δ = . Quando si vogliono ottenere risoluzioni in range dell’ordine del
metro (o inferiori), la durata dell’impulso trasmesso deve essere ridotta a pochi nanosecondi e la potenza di picco in trasmissione può raggiungere valori eccessivi per le caratteristiche del sistema.
Per ottenere un’elevata risoluzione in distanza è comunque sufficiente garantire che la banda del segnale in trasmissione sia abbastanza larga da assicurare la desiderata durata efficace del segnale in uscita dal filtro adattato (FA). Tale condizione può ottenersi modulando in fase o in frequenza l’impulso trasmesso.
Le metodologie utilizzate sono note come tecniche di compressione d’impulso. Esse
sfruttano il fatto che, all’uscita del FA in ricezione, la durata (efficace) e la banda B
del segnale sono legate dalla relazione
eff
D
1
eff
D ⋅ ≈B . (2.40)
Per le proprietà del filtro adattato, la banda del segnale di uscita è uguale a quella del segnale in ingresso (il sistema è lineare) ed anche a quella del segnale trasmesso dal radar. La durata del segnale di uscita risulta quindi inversamente proporzionale alla banda del segnale trasmesso dall’antenna.
In questo paragrafo si descrivono le procedure di generazione e di elaborazione del segnale che utilizzano tecniche di compressione digitale.
2.7.1 ESPRESSIONE DEL SEGNALE TRASMESSO DAL CLEARAD
L’impulso trasmesso ha espressione
( )
( ) (
0)
1 cos K B k k k s t A p t ω t ϑ = = ⋅∑
+ + Ψ . (2.41)Dato che gli impulsi sono coerenti, Ψè nota e uguale per tutti, pertanto può essere posta
a 0.
Esso viene ottenuto modulando in fase la portante del segnale in trasmissione con un segnale ottenuto da sequenze di tipo binario e costituite da un numero finito di bit. Nella relazione precedente:
-
( )
(
)
( )
1 se 1 0 altrimenti k p k p t T k t k p t τ τ = − < ⎧⎪ ⎨ = ⎪⎩ ≤ ; - Tp è la durata dell’impulso trasmesso;- ϑk∈
{ }
0,π è il termine di modulazione di fase;- 2 t
p
A
P
T = ⋅ è l’ampiezza del segnale in trasmissione;
- è la potenza trasmessa. Pt
Vale inoltre la relazione Tp = ⋅K τ. La banda del segnale sB
( )
t è pari a B=1τ ed il rapporto di compressione introdotto è B T⋅ p =K.La generazione dei segnali radar con codifica a traslazione di fase (PSK) è relativamente semplice e può avvenire commutando l’uscita dell’oscillatore locale su una linea di ritardo che attribuisce al segnale la fase desiderata. Le codifiche binarie
determinano sfasamenti pari a 0 e π radianti per ogni sottointervallo τ dell’impulso
trasmesso (di durata Tp).
Una classe di codifiche Binary Phase Shift Keying (BPSK) molto usata è quella costituita dall’insieme delle sequenze di Barker. Per tali codici la funzione di autocorrelazione presenta un picco nell’origine di ampiezza pari alla lunghezza K della sequenza utilizzata, mentre tutti i lobi laterali assumono ampiezza unitaria.
Il segnale analitico trasmesso dal CLEARAD è costituito da un burst di M impulsi ed assume l’espressione
( )
( )
j 0t s t = ⋅A u t e ω , (2.42) dove( )
1(
)
0 M p m u t u t mT − = =∑
− r}
k (2.43)( )
( )
{
( )
1 exp K p k k u t p t j ϑ = =∑
, (2.44)Si pone e , ma tutti i parametri d’ingresso del simulatore ECOSIM,
relativi alla codifica del segnale trasmesso, possono essere modificati. 7
K = M =128
L’impulso up
( )
t ha durata Tp ed energia unitaria:( )
2 0 1 p T p u t dt=∫
. (2.45)L’energia del segnale trasmesso è allora
( )
2 0 r MT t E =∫
s t dt=M⋅Ep, (2.46) dove 2 p E =A . (2.47)2.7.2 CAMPIONI DELL’ECO RICEVUTO DA UN BERSAGLIO
L’eco del bersaglio è ricevuto, separatamente, da ciascun elemento dell’antenna. Il segnale in ingresso all’n-esimo elemento sulla p-esima riga, sn p,
( )
t , ha espressione( )
(
)
2 ( 0 )( ) , , t n p j f f t n p r n p s t = A u t⋅ −τ e π + −τ , . (2.48) Nella (2.48), Ar è l’ampiezza dell’eco ricevuto e0 2 t t v f λ ⋅ = (2.49) è la frequenza Doppler del bersaglio.
Si definisce frequenza Doppler normalizzata, il parametro
t D t r r f f T f ω = ⋅ = . (2.50)
Nella (2.50) il è il Pulse Repetition Time (PRT) e la Tr f è la Pulse Repetition r
Frequency (PRF).
Il ritardo τ che compare nell’espressione del segnale ricevuto n p, sn p,
( )
t , è la somma didue componenti: τt e τn p׀, . Il primo termine,
2 t
t
R c
τ = , (2.51) rappresenta il ritardo dovuto al doppio percorso compiuto dal segnale tra il radar ed il bersaglio considerato (round trip delay). Il ritardo τn p,
׀ è quello sperimentato dal segnale
rispetto all’elemento dell’array assunto come riferimento di fase per il segnale ricevuto. Si consideri inizialmente il caso più semplice nel quale l’array, ULA, è formato da un’unica riga disposta lungo l’asse y. Il ritardo τn׀ =τn p׀, ha espressione
(
,)
(
,)
sin sin u t t n u t t n t k u n k d d n c c c θ φ θ φ t τ׀ = − ⋅ = − ⋅ = − θ φ , (2.52)dove
( )
( ) ( )
( ) ( )
( )
cos sin , sin sin cos u k θ φ θ φ θ φ φ ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦è il versore del vettore d’onda
( )
( ) ( )
( ) ( )
( )
0 cos sin 2 , sin sin cos k θ φ π θ φ θ λ φ ⎡ ⎤ ⎢ ⎥ = ⎢ ⎥ ⎢ ⎥ ⎣ ⎦ φ .Per rendere le relazioni che seguono più compatte e di più agevole interpretazione, si definisce la frequenza spaziale del bersaglio:
(
)
0 0 , sin sin u t t t k θ φ d d t t ϑ θ λ λ ⋅ = = φ t (2.53) che consente di esprimere il ritardo di fase per l’n-esimo elemento dell’array nella forma:0 n n2
ω τ π
− ׀ = ϑ . (2.54)
Il segnale ricevuto assume l’espressione:
( )
jn2 t(
)
j2 f tt 2 0n r t
s t =A e⋅ πϑu t−τ e π ej πf t. (2.55) Dopo la conversione in banda base il segnale ricevuto dall’n-esimo elemento diviene:
( )
( )
2 0 2(
)
_ t 2 t j f t jn j f t n BB n r t s t =s t ⋅e− π = A e⋅ πϑu t−τ e π . (2.56) L’operazione di campionamento avviene sul segnale dopo la conversione in banda base. Gli istanti di campionamento del segnale sn BB_( )
tK … p K sono:
(
)
, 1 , 1, , , 1, , k m p r t = −l T +kτ+mT m= … M k = . (2.57)Nella (2.57) l’l-esimo range gate (che contiene il bersaglio) occupa la finestra temporale , e K è la lunghezza della codifica di Barker: si prelevano K campioni ogni per gli M impulsi considerati. Si consideri allora il solo range gate che contiene il target:
(
l−1)
Tp ≤ ≤t lT r T _ , , 0, , 1, 1, , t k m r t =kτ+mT m= … M− k = … (2.58)I campioni del bersaglio per l’n-esimo elemento dell’array (e per il range gate che contiene il target) sono
_ , 2 2 2 2 1, , 0, , 1 0, , 1 t t k m k t j f t k t 2 t D j jn j jk f jn jm nmk r r x A e e e A e e e e k K m M n N π ϑ πϑ ϑ π τ πϑ πω = ⋅ = ⋅ = = − = − … … … (2.59)
Nella relazione precedente il segnale di eco prodotto da un bersaglio ha una fase esprimibile in funzione del tempo intercorso tra l’emissione ed il ritorno dell’impulso. L’uscita dal mixer in ricezione presenterà una fase costante soltanto se il segnale trasmesso non è stato codificato e se il bersaglio ha una velocità radiale nulla. Per un segnale codificato le differenze di fase sono variabili.
Se il filtro adattato ad una sequenza codificata viene realizzato in banda base e si campionano le componenti in fase e in quadratura (I t
( )
e Q t( )
) per una sequenza diBarker con e per un eco corrispondente ad una frequenza Doppler identicamente
nulla, si ottiene un segnale discreto complesso i cui campioni, 5 N = n n S = +I jQn, sono dati da
[ ]
(
j0, j0, j0, j , j0 s n = e e e eπ e)
. (2.60)Il filtro adattato a tale sequenza ha risposta impulsiva
[ ]
(
j0, j , j0, j0, jh n = e− e− π e− e− e− 0
)
, (2.61)L’impiego dei codici di Barker (e più in generale dei codici BPSK) è conveniente proprio perché i filtri adattati a tali sequenze hanno coefficienti reali e pari a +1 o -1. Il segnale discreto prodotto in uscita dal filtro adattato è rappresentato in Figura 2.21. L’insieme dei codici di Barker è rappresentato in Tabella 2.1.
Un problema di tutti i ricevitori è individuabile, come risulta dal fattore ejk2π τft nella
(2.59), nel disadattamento prodotto dall’effetto Doppler sul segnale ricevuto.
Se il bersaglio illuminato dall’antenna radar ha velocità radiale relativa nulla, il segnale retrodiffuso è (approssimativamente) una replica ritardata e attenuata del segnale trasmesso.
Se il moto del bersaglio ha una componente radiale non nulla rispetto all’antenna, il segnale subisce una modifica della fase istantanea (effetto Doppler) ed il filtro in ricezione non è più adattato al segnale ricevuto.
La presenza di disadattamento produce gli effetti seguenti:
- il Signal-to-Noise Ratio (SNR) all’uscita dal FA è minore del valore ottimo;
- i lobi secondari del segnale in uscita dal FA hanno ampiezza maggiore di quella desiderata;
- si sperimenta un allargamento dell’impulso in uscita dal FA ed una conseguente riduzione della risoluzione in distanza ottenibile per il sistema.
L’effetto Doppler genera una variazione proporzionale ad f della frequenza portante. t
Se, per segnali BPSK e per un bersaglio con velocità radiale nulla, il segnale ricevuto
agli istanti t + e τ t +2τ ha fasi Φ e Φ +π, in presenza di effetto Doppler esso
presenta, agli stessi istanti, le fasi Φ +2π τft e Φ + + ⋅π 2 2
(
π τft)
. L’entità dell’intervallo tra due campioni successivi determina la possibilità di utilizzare i codici di Barker: se τ è piccolo il ΔΦ =2π τft è trascurabile. Se il segnale ricevuto ha una durata ampia, a parità di intervallo di campionamento τ e di shift Doppler f , il termine tpuò diventare dannoso, potendo alterare la sequenza delle fasi e, al limite, trasformare una fase 0 in
k⋅ΔΦ
π e viceversa.
Nel caso in esame i parametri del segnale trasmesso valgono:
[ ]
70 p T = ns , K =7 e quindi Tp 10[ ]
ns K τ = = .Per una velocità radiale relativa di 250
[
Km h]
=69.4[ ]
m s si ottiene[
]
max 2 2 69.4 35,612 KHz 0.0039 R t v f λ ⋅ ⋅ = = =[
]
[ ]
2π τfD 2.2 mrad 0.1282 deg ΔΦ = = = .Il ΔΦ è piccolo anche per velocità radiali elevate.
Il parametro che compare nella (2.59) è un fattore d’ampiezza aleatorio che può
ottenersi estraendo una realizzazione da un processo aleatorio di Rayleigh con parametro
r
A
2
σ uguale alla potenza ricevuta, che si ottiene direttamente dall’equazione radar in funzione del rapporto segnale-rumore per singolo impulso e per singolo elemento d’antenna in ricezione ξt:
(
) (
)
( )
2 0 3 4 0 , , 4 t p t t t t t t s amb t PT G g N L L R t θ φ θ φ λ σ ξ π = , (2.62) dove:)
- g
(
θ φt, t è il guadagno in ricezione del singolo elemento dell’array nella direzione(
θ φt, t)
;- è la potenza di picco in trasmissione; Pt
- Gt
(
θ φt, t)
è il guadagno in trasmissione dell’array nella direzione(
θ φt, t)
;- N0 è la densità spettrale di potenza del rumore su ogni canale in ricezione;
- L è un fattore di perdita che include le perdite di sistema in trasmissione e in s ricezione;
- Lamb è un fattore di perdita che include le perdite atmosferiche [2]. Codici di Barker Lunghezza Codici 2 0 π 0 0 3 0 0 π 0 π 0 4 0 0 π 0 0 0 0 π 5 0 0 0 π 0 7 0 0 0 π π 0 π 11 0 0 0 π π π 0 π π 0 π 13 0 0 0 0 0 π π 0 0 π 0 π 0
Tabella 2.1: Codici di Barker.
Dall’esame della relazione (2.59) si osserva che uno dei fattori esponenziali dipende dall’indice spaziale n, e l’altro dall’indice temporale m. Il vettore colonna di N elementi, che corrisponde ad un fissato valore dell’indice k,
[
]
, 0, , ; 1, , ; ; 1, , , 1, 2, ,
m k m k m k N m k
x = ⎣⎡x x … x − ⎤⎦ k∈ … K (2.63)
contiene i campioni estratti dagli N canali corrispondenti e relativi al k-esimo range bin. Si ha allora _ , 2 2 2 2 2 2 2 2 1, ; 1, , , t t k m k t k t t D k t D t j f t j jn j jk f jn jm nmk r r j jn jm jk f r k r k r r x A e e e A e e e e A e e e A A e A k K π ϑ πϑ ϑ π τ πϑ πω ϑ πϑ πω π τ = ⋅ = ⋅ = = ⋅ = ⋅ ≈ =1, 2, ,… (2.64)
La somma dei campioni ricevuti dai diversi elementi (somma sull’indice n) costituisce l’operazione di array processing che determina il beamforming. Quando si utilizza un array di p righe ciascuna composta da N elementi, e si impiegano
2 p
righe per il canale e
Σ
2 p
le operazioni di shading, null steering e notch widening sui canali somma e differenza, restituisce le seguenti espressioni per i campioni dell’eco ricevuto da un bersaglio:
2 _ 2 _ 1, , , 1, , k D r k D r j jm mk j jm mk x A e e m M k K x A e e ϑ πω ϑ πω Σ Σ Δ Δ ⎧ = ⋅ ⎧ = ⎪ ⎨ ⎨ = = ⋅ ⎩ ⎪⎩ … … . (2.65) Nella (2.65) r , r j j A β eΨΣ A β e ΨΔ Σ
Σ = ⋅ Δ = Δ⋅ , Ψ e Σ Ψ sono v.a. uniformemente Δ
distribuite tra 0 e 2π (Ψ Ψ ∈Σ, Δ U
[
0,2π)
) ed i parametri d’ampiezza aleatori βΣ e βΔsi ottengono da processi di Rayleigh con parametro σ uguale alle potenze ricevute, 2
rispettivamente, dai fasci somma e differenza
(
)
( )
(
) (
)
( )
2 2 0 _ 3 4 2 0 _ 3 4 , 4 , , 4 t t t t r s amb t t t t t t r s amb t PG P L L R PG G P L L R ϕ θ λ σ π t ϕ θ ϕ θ λ π Σ Σ Σ Δ Δ = = σ . (2.66)Le relazioni precedenti valgono nell’ipotesi che il segnale venga trasmesso sul canale Σ
e ricevuto separatamente sui canali Σ e Δ.
2.7.3 CAMPIONI DELL’ECO RICEVUTO DAL CLUTTER DI SUPERFICIE
Il clutter è definito come l’insieme degli echi ricevuti da tutti gli oggetti che non hanno interesse tattico. Tali caratteristiche per un radar veicolare sono individuabili, ad esempio, negli echi prodotti dalla pavimentazione stradale, o dal terreno fuori dalla sede stradale ed illuminato dall’antenna.
Per approssimare una distribuzione continua ed uniforme di scatteratori, si suddivide ogni cella in distanza in un numero sufficientemente elevato di areole in range e in azimut. Ciascuna areola viene comunemente denominata clutter patch.
La suddivisione in range è resa necessaria dalla relazione intercorrente tra le distanze operative minima e massima del radar e la dimensione della cella di risoluzione in distanza. Il limite inferiore alla distanza operativa del sistema è imposto dalla durata dell’impulso trasmesso: si assume Rmin =10.5
( )
m . Il limite superiore è determinato in funzione della limitata potenza in trasmissione, delle perdite elevate che si sperimentano alle frequenze di funzionamento del sistema e delle scelte progettuali: il valore risultante per questa tipologia di sistemi è nell’intorno dei 200 (m): si assume( )
max 202.5
R = m .
La dimensione di una cella di risoluzione in distanza è 1.5
( )
2 c
R m
B
Δ = = e le
variazioni dell’ampiezza del segnale ricevuto, che è inversamente proporzionale al quadrato della distanza, non risulta trascurabile, ad esempio, nel passaggio da 15 (m) a 16.5 (m). Anche in considerazione delle lunghezze d’onda caratteristiche della banda a
76–77 GHz, c 3.9
(
mmf
λ= ≈
)
, si suddivide il settore angolare in patch con dimensioni( )
1.5 1 R m θ ⎧Δ = ⎨ Δ = ⎩ .Considerando le sole areole nelle quali risulta suddivisa la superficie illuminata dal lobo principale del diagramma di radiazione, si ha un numero di patch in distanza
202.5 10.5 128 1.5 R N = ⎢⎡ − ⎤⎥ ⎢ ⎥= , (2.67)
ed un numero di patch in azimut NAZ =20, per un intervallo in azimuth pari a
10 θ 10
− ° ≤ < ° .
Il numero totale di clutter patch sull’area illuminata dal lobo principale è quindi .
2560
C AZ R
N =N ⋅N =
Si osserva che il clutter non è ambiguo in distanza, perché la massima distanza non ambigua del radar è molto maggiore della massima distanza operativa (Rmax =202.5
( )
m ):( )
1.5 8 17.7 6 2655 2 NA c PRI R = ⋅ = e ⋅ e− = m . (2.68)e gli echi di seconda traccia hanno ampiezza trascurabile.
La distanza di ogni patch si approssima uguale a quella del suo punto centrale dall’antenna: R i
( )
,i=1, 2, ,… NR. (2.69) La suddivisione in azimut è imposta dalla risoluzione (teoricamente) conseguibile con la tecnica monopulse proposta per la realizzazione del sistema. La definizione dei clutter patch consente la discretizzazione del calcolo della componente di clutter del segnale ricevuto, che risulta dalla somma dei contributi di ciascun patch. Si rileva, dalla geometria del sistema, che la posizione di ciascuna areola è individuata sul piano x,y dalle coordinate polari( ) ( )
(
,)
, 1, 2, , 1, 2, , R AZ i N r i j j N θ ⎧⎨ == ⎩ … … . (2.70) Si assume che l’indice j cresca dagli azimut negativi a quelli positivi e che l’indice i cresca dalla distanza minima alla distanza massima. La relazione tra il ground range e lo slant ranger R è espressa dalla relazione
( )
( )
2 2a
r i = ⎡⎣R i ⎤⎦ −h , (2.71) dove è l’altezza dell’antenna dal suolo ha
Lo slant range individua univocamente anche l’angolo di elevazione:
( )
asin( )
2 a h i R i π φ = ⎛⎜⎜ ⎞⎟⎟ ⎝ ⎠+ ec . (2.72) Ogni patch rappresenta un’area limitata, a terra, dalle discretizzazioni introdotte per il range e l’azimut. La RCS dell’ij-esimo clutter patch è data da( ) ( )
(
)
( ) ( )
(
)
( )
( )
0 0 , , s ij ij ij i j A i j R i R σ σ φ θ σ φ θ θ ψ = ⋅ = = ⋅ ⋅ Δ ⋅ Δ ⋅ , (2.73) dove:- il parametro σ φ0
(
( ) ( )
i ,θ j)
, anche noto come coefficiente di scattering differenziale, rappresenta la RCS per unità di superficie illuminata;- Aij è l’area del patch considerato;
- ψ è l’angolo di grazing, cioè l’angolo compreso tra la retta che congiunge l’antenna ij
del radar con l’ij-esimo clutter patch e la tangente alla superficie sull’ij-esimo clutter patch. [4]
Il clutter viene caratterizzato con un processo Auto Regressivo di ordine 1 con coefficiente di correlazione ρ .
Esso ha funzione di autocorrelazione
( )
1 22 m W c R m σ ρ ρ = − ,e densità spettrale di potenza
( )
2 2 1 2 cos(2 W c S f ) f σ ρ ρ π = + − .Figura 2.22: DSP del processo AR(1)
Per ottenere i campioni del processo, si parte dal vettore estratto da un processo Gaussiano bianco w con varianza σ , e si applica la trasformazione W2
c=L w
⋅
, (2.74)dove è la matrice ottenuta tramite la decomposizione di Cholesky dalla matrice di
covarianza , dato che
L
cM
T cM =LL
. (2.75) Variando il valore di ρ , varia la banda doppler del clutter, più ρ è vicino a 1 e più la banda è stretta.L’ RCS di ogni clutter patch viene moltiplicata per l’ampiezza dei campioni così generati. [5]
2.8 Struttura del programma di simulazione ECOSIM
Il programma ECOSIM è un sorgente MATLAB che definisce lo scenario del sistema CLEARAD. Le dimensioni, le posizioni, le velocità, le accelerazioni e il valor medio della RCS di tutti i bersagli (e del clutter “discreto” presente sullo scenario) sono allocati in memoria in vettori composti da undici elementi:
1. lunghezza 2. larghezza 3. altezza 4. coordinata x 5. coordinata y 6. l’angolo di yaw 7. la velocità v x 8. la velocità vy 9. l’accelerazione a x 10. l’accelerazione ay 11. la RCS media
Le componenti delle velocità e delle accelerazioni, unitamente alle coordinate x e y, sono riferite ad un sistema di riferimento solidale all’autovettura che trasporta il sensore. L’angolo di yaw indica la direzione e il verso dello spostamento. Si assume che l’origine sia posizionata sul paraurti anteriore dell’autovettura, ad un’altezza di 40 (cm). I moti dei bersagli vengono specificati rispetto ad un sistema di riferimento fisso (solidale al suolo) e coincidente con il sistema di riferimento solidale all’antenna del CLEARAD all’istante d’inizio osservazione.
X
Y
7.5 (m)
1.875 (m) 5.625(m )
Figura 2.23: Geometria del sistema di riferimento cartesiano utilizzato
Lo script Ecosim_main definisce i valori di default da assegnare alle variabili utilizzate dal simulatore ed effettua le chiamate alle singole funzioni del programma.
Dopo aver definito i valori di default viene allocata una matrice S con tante colonne quanti sono gli oggetti presenti nello scenario (targets e clutter discrete): ogni colonna contiene il vettore di stato di un oggetto. Le dimensioni di default delle celle sono:
1.5
R m
Δ = e Δ =θ 1 . Per tali valori il numero di celle in distanza risulta
202.5 10.5 128 1.5 R N = ⎢⎡ − ⎤⎥ ⎢ ⎥=
Il numero di celle in azimut è dato da NAZ =20, sull’intervallo: 10 θ 10 .
° °
− ≤ <
Le posizioni delle celle che contengono le superfici dei bersagli sulle quali incide l’onda elettromagnetica trasmessa dal radar (e che verranno indicate nel seguito come celle in vista), delle celle in ombra (radar shadow patch) e delle celle di clutter (clutter patch) sono contenute in una matrice di dimensioni
(
NR,NAZ)
.Le celle in vista sono quelle dalle quali si riceve un’eco radar dai bersagli e dai clutter discrete. Le celle che occupano la regione oscurata dalla presenza di un oggetto sono celle in ombra. Tutte le celle rimanenti sono celle di clutter.
La posizione delle celle in vista è funzione delle dimensioni e della posizione del baricentro dei singoli oggetti.
Il programma permette all’utente di definire il numero, le dimensioni, le RCS ed i vettori di stato degli oggetti modificando i valori di default già inseriti nella fase di inizializzazione delle variabili. Inoltre, consente la visualizzazione delle celle in vista, dei radar shadow patch e dei clutter patch, in funzione del tempo, sia in coordinate cartesiane, sia in coordinate polari.
I parametri utili al calcolo dei campioni del segnale ricevuto, come quelli relativi all’asfalto e alle perdite meteo, vengono selezionati dall’utente inserendo la riflettività media dell’asfalto e le condizioni meteorologiche, mentre, i valori dei guadagni d’antenna in azimut ed in elevazione vengono calcolati tramite le funzioni azimut_gain e elev_gain che hanno come variabile di ingresso l’angolo di vista.
In figura 2.24 si possono vedere le curve dell’attenuazione per pioggia in dB/Km in funzione della frequenza, al variare dell’intensità delle precipitazioni. [6]
Figura 2.24: Attenuazione per pioggia
Il calcolo dei campioni avviene come descritto nel paragrafo 2.7.
I vettori di stato di tutti gli oggetti presenti sullo scenario simulato sono aggiornati ogni
PRI secondi. Il calcolo prosegue per M burst di impulsi, ciascuno con dimensione .
Il parametro M può assumere i valori 128, 256 e 512.
R
Il calcolo dei campioni del segnale ricevuto viene ottenuto sommando i contributi di tutte le celle in vista, celle in ombra e celle di clutter che si trovano in una cella di risoluzione in distanza (1.5 metri). Il numero complessivo di patch per ogni cella in
distanza ( ), considerando i valori di default assegnati alle dimensioni in distanza e in
angolo dei singoli patch, è pari a:
rc
N
_ _ 20
rc AZ rc R rc
N =N ⋅N = .
I campioni complessi in banda base vengono memorizzati su file di testo. Essi costituiscono l’ingresso del sistema radar simulato (SIMULINK).