2 A
CCELERAZIONET
RAMITEIPS
S
IMMETRIZZATALa routine “Tracer”, contenuta nell’EMvironment, prende in ingresso un buffer, il quale rappresenta una possibile sequenza di contributi (cioè il trasmettitore e il punto di osservazione effettivi, i generici punti di partenza e di arrivo dei raggi, l'ordine e il tipo dei contributi). Nella prima fase si occupa di verificare che tutti i punti di interazione che le vengono passati dalla routine “Riflessione-Trasmissione” appartengano effettivamente alle piastre in esame; appena trova un punto che non appartiene ad una piastra esce. In caso affermativo, cioè se tutti i punti appartengono alle piastre, nella seconda fase, passa ad esaminare che nessuna tratta sia ostacolata da qualche piastra; anche in questo caso, appena verifica che una piastra ostacola una qualsiasi tratta esce. Fissata la tratta si avvia un ciclo su tutte le piastre onde evidenziare una eventuale ostruzione. Infine, se anche questo controllo dà esito positivo, come terzo passo, memorizza la sequenza di contributi che poi sarà usata per la visualizzazione del ray tracing e per il calcolo del campo.
E’ contenuta altresì la subroutine “TracerDiffrSing” che esegue solo il secondo step della subroutine “Tracer” poiché nel caso di diffrazione singola sappiamo a priori che il punto di diffrazione appartiene allo spigolo in esame e quindi si verifica solo la visibilità delle tratte. Passando in rassegna la possibile casistica dei percorsi si è evidenziato come le informazioni di visibilità contenute nella matrice IPS simmetrizzata potesse snellire l’onere computazionale legato all’esecuzione di tali routine: le piastre che potenzialmente possono ostruire una tratta debbono rispettare dei vincoli di visibilità che dipendono dal tipo di contributo presente agli estremi della tratta. Tale operazione è svolta dalla subroutine “AccelerVisByIPS” la quale restituisce un check logico vero qualora la potenziale piastra in esame è candidata ad ostacolare la tratta. La possibilità di scartare una piastra dal check di visibilità introduce il vantaggio di una diminuzione dei tempi di processing in misura tanto più rilevante quanto più grande è il numero di piastre scartate. Si va quindi ad intervenire sul numero di test di visibilità per raggio, Pv.
2.1 Modalità di simulazione in EMvironment 3.0
Il simulatore permette tre diverse modalità di simulazione,[3]:
• Simulazione Outdoor, che prevede che nel processing dello scenario vengano considerate solo le informazioni relative alle piastre esterne. Nel calcolo dei coefficienti di riflessione inoltre tutte le superfici vengono considerate con spessore infinito e quindi nel calcolo del ray tracing il contributo trasmesso non viene tenuto in considerazione.
• Simulazione Outdoor con piastre di spessore finito, che si differenzia rispetto alla prima poiché considera superfici con spessore finito per il calcolo dei coefficienti di Fresnel, anche in questo caso comunque il contributo di campo
trasmesso è trascurato.
• Simulazione Indoor, che prevede nel processing dello scenario l’esportazione delle informazioni relative anche ai muri interni. In questo caso viene valutato anche il campo trasmesso e quindi le piastre vengono tutte considerate con spessore finito.
In Figura 2. 2 vengono illustrate le differenze nell’acquisizione dei dati relativi ad un prisma per le tre modalità di simulazione.
Figura 2. 2 - Differenze di esportazione di un prisma per le tre modalità di simulazione, [3]
2.2 Casistica Sequenze dei Contributi
Vengono di seguito riportati nove possibili condizioni di buffer in modo tale da mostrare le relazioni di visibilità implicite ai casi stessi, le quali hanno portato alla stesura della subroutine “AccelerVisByIPS”. Di seguito verrà indicata con la lettera n la normale uscente della piastra che potenzialmente ostruirebbe la tratta considerata.
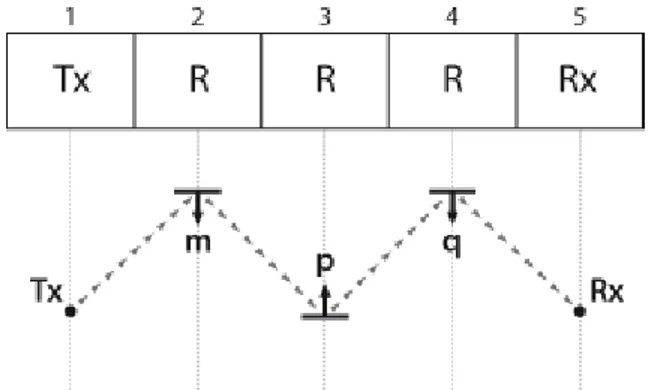
Caso a)
Figura 2. 3 - Tratta composta dalla successione di contributi: RRR
Con una dimensione del buffer pari a 5 il numero di tratte è pari a 4.
Coinvolgendo solo riflessioni, fig. 2.1, l’analisi si basa sul contributo caratterizzante la tratta ovvero il contributo dell’estremo superiore della prima, seconda e terza tratta e
dell’estremo inferiore della quarta. Affinché la generica piastra n-esima possa ostacolare il raggio debbono essere verificate le seguenti condizioni di visibilità:
1. IPS (m,n) = 1 per la tratta 1, ovvero la piastra n-esima è vista dalla m-esima; 2. IPS (p,n) = 1 per la tratta 2, ovvero la piastra n-esima è vista dalla p-esima; 3. IPS (q,n) = 1 per la tratta 3, ovvero la piastra n-esima è vista dalla q-esima; 4. IPS (q,n) = 1 per la tratta 4, ovvero la piastra n-esima è vista dalla q-esima; oppure
1. IPS (m,n) = 1 per la tratta 1, ovvero la piastra n-esima è vista dalla m-esima;
2. IPS (m,n) = 1 OR IPS (p,n) = 1 per la tratta 2, ovvero la piastra n-esima è vista dalla m-esima o dalla p-esima;
3. IPS (p,n) = 1 OR IPS (q,n) = 1 per la tratta 3, ovvero la piastra n-esima è vista dalla p-esima o dalla q-esima;
4. IPS (q,n) = 1 per la tratta 4, ovvero la piastra n-esima è vista dalla q-esima.
Il primo gruppo di condizioni che portano a considerare l’ennesima piastra come possibile ostacolo conduce ad una soluzione meno conservativa rispetto alla seconda, ma seleziona un numero di piastre inferiore. La scelta cade sul secondo gruppo di condizioni.
Nel momento in cui si sia interessati ad una indagine di tipo outdoor, l’interfaccia grafica
scompone le primitive considerando i muri come limitati da due piastre di normali opposte, m e opposta di m (opp(m)), separate dallo spessore indicato nel database delle piastre.
Nelle immagini riportate nel paragrafo le piastre opposte vengono indicate con una linea tratteggiata parallela alla piastra indicata per nome.
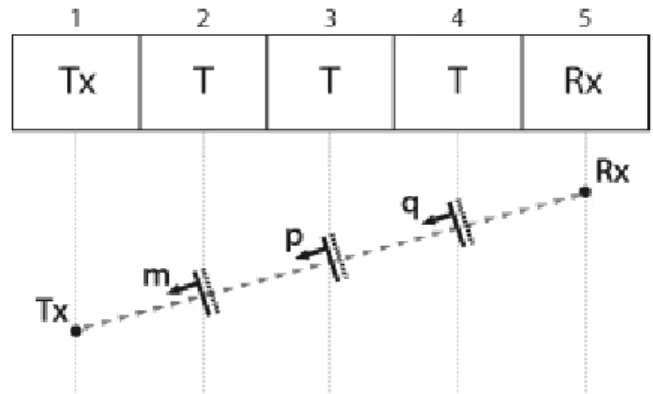
Caso b)
Dalla fig. 2.2 si evidenziano invece tali condizioni di visibilità per tre successive trasmissioni:
1. IPS (m,n) = 1 per la tratta 1, ovvero la piastra n-esima è vista dalla m-esima;
2. IPS (p,n) = 1 AND n ≠ opposta (m) per la tratta 2, ovvero la piastra n-esima è vista dalla p-esima ed è diversa dall’opposta di m;
3. IPS (q,n) = 1 AND n ≠ opposta (p) per la tratta 2, ovvero la piastra n-esima è vista dalla q-esima ed è diversa dall’opposta di p;
4. IPS (opposta (q),n) = 1 per la tratta 4, ovvero la piastra n-esima è vista dalla dalla piastra opposta a q.
Caso c)
Figura 2. 5 - Tratta composta dalla successione di contributi:TRTTR
Con una dimensione del buffer pari a 7 il numero di tratte è pari a 6.
Dalla fig. 2.3 si evidenziano tali condizioni di visibilità per la piastra n-esima: 1. IPS (m,n) = 1 per la tratta 1, ovvero la piastra n-esima è vista dalla m-esima;
2. IPS (p,n) = 1 AND n ≠ opposta (m) per la tratta 2, ovvero la piastra n-esima è vista dalla p-esima ed è diversa dall’opposta di m;
3. IPS (q,n) = 1 AND n ≠ opposta (p) per la tratta 2, ovvero la piastra n-esima è vista dalla q-esima ed è diversa dall’opposta di p;
4. IPS (r,n) = 1 AND n ≠ opposta (q) per la tratta 2, ovvero la piastra n-esima è vista dalla r-esima ed è diversa dall’opposta di q;
5. IPS (s,n) = 1 AND n ≠ opposta (r) per la tratta 2, ovvero la piastra n-esima è vista dalla s-esima ed è diversa dall’opposta di r;
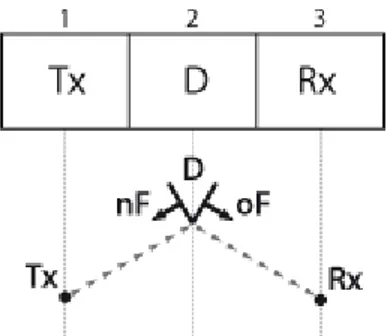
Caso d)
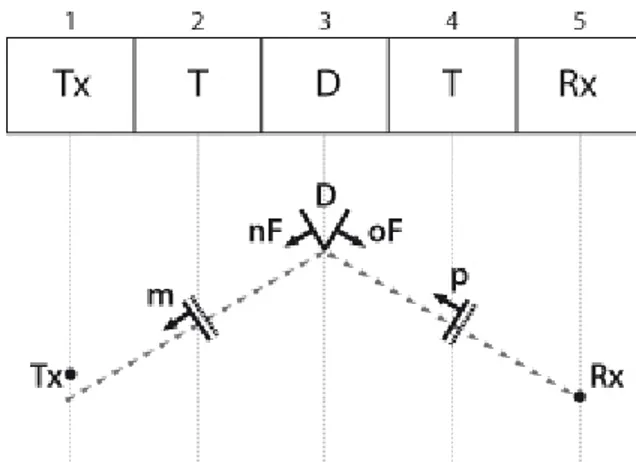
Figura 2. 6 - Tratta composta dalla successione di contributi: D
Con una dimensione del buffer pari a 3 si hanno due sole tratte e un unico contributo, nella fattispecie, fig. 2.4, un contributo di diffrazione. La condizione di visibilità affinchè la piastra n-esima ostacoli un possibile percorso tra Tx e Rx è che sia vista o dalla piastra oFace o dalla piastra nFace. Risultano le due condizioni coincidenti:
1. IPS (nF,n) = 1 OR IPS (oF,n) = 1 per la tratta 1, ovvero la piastra n-esima è vista dalla piastra nF o dalla piastra oF;
2. IPS (nF,n) = 1 OR IPS (oF,n) = 1 per la tratta 2, ovvero la piastra n-esima è vista dalla piastra nF o dalla piastra oF.
Caso e)
Figura 2. 7 - Tratta composta dalla successione di contributi:DR
Con una dimensione del buffer pari a 4 il numero di tratte è pari a 3.
Nel caso di contributo diffratto seguito da una riflessione, fig. 2.5, otteniamo le seguenti condizioni:
1. IPS (nF,n) = 1 OR IPS (oF,n) = 1 per la tratta 1, ovvero la piastra n-esima è vista dalla piastra nF o dalla piastra oF;
2. IPS (m,n) = 1 per la tratta 2 , ovvero la piastra n-esima è vista dalla m-esima; 3. IPS (m,n) = 1 per la tratta 3, ovvero la piastra n-esima è vista dalla m-esima.
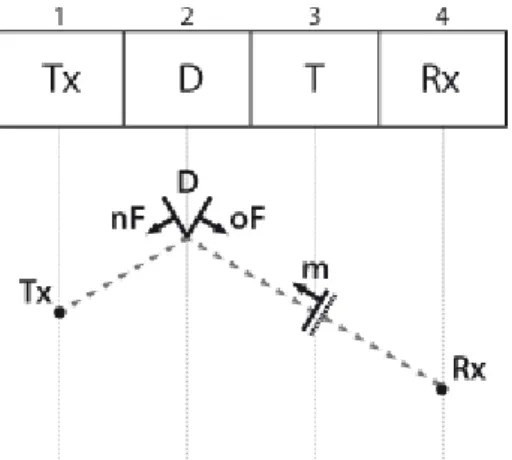
Caso f)
Figura 2. 8 - Tratta composta dalla successione di contributi:DT
Nel caso di contributo diffratto seguito da una trasmissione, fig. 2.6, otteniamo le seguenti condizioni:
1. IPS (nF,n) = 1 OR IPS (oF,n) = 1 per la tratta 1, ovvero la piastra n-esima è vista dalla piastra nF o dalla piastra oF.
2. IPS (m,n) = 1 per la tratta 2, ovvero la piastra n-esima è vista dalla m-esima;
3. IPS (opposta (m),n) = 1 per la tratta 3, ovvero la piastra n-esima è vista dalla piastra opposta a m.
Caso g)
Figura 2. 9 - Tratta composta dalla successione di contributi:RD
Nel caso di una diffrazione come ultimo contributo del percorso, fig. 2.7, possiamo osservare le seguenti condizioni:
1. IPS (m,n) = 1 per la tratta 1, ovvero la piastra n-esima è vista dalla m-esima;
2. IPS (nF,n) = 1 OR IPS (oF,n) = 1 per la tratta 2, ovvero la piastra n-esima è vista dalla piastra nF o dalla piastra oF;
3. IPS (nF,n) = 1 OR IPS (oF,n) = 1 per la tratta 3, ovvero la piastra n-esima è vista dalla piastra nF o dalla piastra oF.
Si osserva che il contributo di diffrazione influenza la condizione di visibilità sulle due tratte convergenti sullo spigolo diffrattivo.
Caso h)
Figura 2. 10 - Tratta composta dalla successione di contributi:RDR
Analizziamo in questo caso il contributo di diffrazione preceduto e seguito da una riflessione, 4 tratte totali riportate in fig. 2.8. Si evidenziano le seguenti relazioni di visibilità:
1. IPS (m,n) = 1 per la tratta 1, ovvero la piastra n-esima è vista dalla m-esima;
2. IPS (nF,n) = 1 OR IPS (oF,n) = 1 per la tratta 2, ovvero la piastra n-esima è vista dalla piastra nF o dalla piastra oF;
3. IPS (m,n) = 1 per la tratta 3, ovvero la piastra n-esima è vista dalla m-esima; 4. IPS (m,n) = 1 per la tratta 4, ovvero la piastra n-esima è vista dalla m-esima.
Caso i)
Analizziamo in questo caso il contributo di diffrazione preceduto e seguito da una trasmissione, fig. 2.9. Si evidenziano le seguenti 4 relazioni di visibilità:
1. IPS (m,n) = 1 per la tratta 1, ovvero la piastra n-esima è vista dalla m-esima;
2. [IPS (nF,n) = 1 OR IPS (oF,n) = 1] AND n ≠ opposta (m) per la tratta 2, ovvero la piastra n-esima è vista dalla piastra nF o dalla piastra oF e non deve coincidere con l’opposta della piastra m-esima;
3. IPS (p,n) = 1 AND [n ≠ opposta (oF) AND n ≠ opposta (nF)] per la tratta 3, ovvero la piastra n-esima è vista dalla piastra p-esima e non deve coincidere con la piastra oF e nF;
4. IPS (opposta (p),n) = 1 per la tratta 4, ovvero la piastra n-esima è vista dalla piastra opposta a p.
2.3 Descrizione delle Routine “AccelerVisByIPS”
La subroutine si compone di tre fasi consecutive:
1. inizializzazione dei parametri utili per il tipo di contributo corrente; 2. inizializzazione dei parametri utili per il tipo di contributo precedente;
3. determinazione del valore di CHECK in base alla tratta e ai tipi di contributo coinvolti.
Nelle prime due fasi vi è un recupero dei dati necessari a partire dagli array dedicati alle
piastre, secondo la modalità mostrata nei diagrammi di flusso riportati alla fine del capitolo 2.
L’ultima fase è costituita dalla somma delle osservazioni presentate nel paragrafo 2.1. Particolare attenzione viene riservata alla gestione della diversità di contributi (Riflessione, Diffrazione, Trasmissione) presenti in posizione iniziale, finale o nel mezzo tra le due citate, come mostrato nel codice in linguaggio Fortran riportato nelle fig. 2.10-11-12.
CHECK= .FALSE. If(TypeContr .ne. 'D') Then
if(IPS(p, nPiastra) == 1) then
CHECK= .TRUE.
end if
Else !--> ContrType = Diffrazione
if((IPS(nFace, nPiastra) == 1).OR.(IPS(oFace, nPiastra) == 1)) then
CHECK= .TRUE.
end if
End If
Figura 2. 12 - Codifica Fortran per la gestione della prima tratta del percorso analizzato nella subroutine AccelVisByIPS
CHECK= .FALSE.
If(TypeContr == 'R') Then if(IPS(p, nPiastra) == 1) then
CHECK= .TRUE.
end if
Else If(TypeContr == 'T') Then opp_p= Pias(p)%piaOpp
if(IPS(opp_p, nPiastra) == 1) then
CHECK= .TRUE.
end if
Else !--> ContrType = Diffrazione
if((IPS(nFace, nPiastra) == 1).OR.(IPS(oFace, nPiastra) == 1)) then
CHECK= .TRUE.
end if
End If
Figura 2. 13 - Codifica Fortran per la gestione dell’ultima tratta del percorso analizzato nella subroutine AccelVisByIPS
CHECK= .FALSE.
If(TypeContr == 'R') Then if(IPS(p, nPiastra) == 1) then
CHECK= .TRUE.
end if
Else If(TypeContr == 'T') Then if( TypeContrPrec .NE. 'D' )then
opp_pPrec= Pias(pPrec)%piaOpp
if((IPS(p, nPiastra) == 1).AND.( nPiastra .ne. opp_pPrec)) then
CHECK= .TRUE.
end if
else
if((IPS(p, nPiastra) == 1) .AND. (( nPiastra .ne. nFaceOppPrec) .AND. (nPiastra .ne. oFaceOppPrec)) ) then
CHECK= .TRUE.
end if
end if
Else !--> ContrType = Diffrazione
if((IPS(nFace, nPiastra) == 1).OR.(IPS(oFace, nPiastra) == 1)) then
CHECK= .TRUE.
end if
End If
Figura 2. 14 - Codifica Fortran per la gestione di tutte le tratte escluse la prima e l'ultima del percorso analizzato nella subroutine AccelVisByIPS
2.4 Risultati Sperimentali
Vengono di seguito riportati i risultati, in termini di RTT-Ray Tracing Time, ottenuti
dalle simulazioni condotte sullo scenario rappresentante Piazza Mazzini a Viareggio utilizzando la versione dell’EMvironment con assenza di simmetrizzazione della matrice IPS e con la versione dotata di simmetrizzazione della matrice IPS e accelerazione tramite le relazioni di visibilità. Per entrambe le versioni sono state usate anche le tecniche di accelerazione SVP-Space Volumetric Partitioning ed LSP-Line Space Partitioning.
Figura 2. 15 -. Scenario oggetto di indagine tramite EMvironment.3
La piattaforma usata per i test dispone di un processore AMD Athlon XP 2400+ a 2.00GHz con 2.00GB di RAM.
Dai dati di misura si è ricavato anche il guadagno percentuale definito come segue:
100 1 [ ] ] [ ⎟⎟⋅ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − = T T Gott ott
dove T è il RTT senza ottimizzazione alcuna, T[ott] il RTT con ottimizzazione e con ott che potrà assumere le sigle FRT-Full Ray Tracing, SVP e LSP.
Dati dello scenario:
• Trasmettitore: dipolo a λ/2 sotto la linea dei tetti
• Ricevitori: 10 dipoli a λ/2 posizionati al centro della piazza • Altezza edifici: 10m
I risultati vengono riassunti nelle tabelle 2.1-2.2-2.3 e ordinati per contributo dell’ordine crescente e per le diverse tecniche di accelerazione utilizzate.
Per tutte e tre le configurazioni analizzate si registra un guadagno medio sui primi tre ordini del 60% circa. Da ciò possiamo dedurre il vantaggio temporale introdotto dalla nuova subroutine tramite l’abbattimento del numero di possibili percorsi che avrebbero causato un fallimento dei test di visibilità.
I Ordine II Ordine III Ordine FRT No Simm. IPS Sim. + Accel. No Simm. IPS Sim. + Accel No Simm. IPS Sim. + Accel RTT [sec] 1,28 0,5 26,63 11,82 2935,68 669,05 G% 60,97 55,60 77,20
Tabella 2. 1 - Risultati delle simulazioni di FRT in termini di RTT per diversi ordini e le due versioni del software senza e con simmetrizzazione della matrice IPS unita all’accelerazione tramite la subroutine “AccelerVisByIPS”
Figura 2. 16 - Guadagno percentuale ottenuto nell’analisi tramite il FRT con l’introduzione della simmetrizzazione della matrice IPS unita all’accelerazione tramite la subroutine “AccelerVisByIPS”
Guadagno percentuale 0 20 40 60 80 100 I II III ordine contributi G%
I Ordine II Ordine III Ordine SVP No Simm. IPS Sim. + Accel No Simm. IPS Sim. + Accel No Simm. IPS Sim. + Accel. RTT [sec] 1,23 0,2 11,80 7,22 1172,70 647,43 G% 83,80 38,80 44,79
Tabella. 2. 2 - Risultati delle simulazioni di FRT con accelerazione SVP(4,4) in termini di RTT per diversi ordini e le due versioni del software senza e con simmetrizzazione della matrice IPS unita all’accelerazione tramite la subroutine “AccelerVisByIPS”
Figura 2. 17 - Guadagno percentuale ottenuto nell’analisi tramite il FRT e l’accelerazione SVP attiva con l’introduzione della simmetrizzazione della matrice IPS unita all’accelerazione tramite la subroutine “AccelerVisByIPS” Guadagno percentuale 0 20 40 60 80 100 I II III ordine contributi G%
I Ordine II Ordine III Ordine LSP No Simm. IPS Sim. + Accel No Simm. IPS Sim. + Accel No Simm. IPS Sim. + Accel. RTT [sec] 0,44 0,16 5,81 2,1 47,53 22,78 G% 64,30 64,00 52,10
Tabella 2. 3 - Risultati delle simulazioni di FRT con accelerazione LSP in termini di RTT per diversi ordini e le due versioni del software senza e con simmetrizzazione della matrice IPS unita all’accelerazione tramite la subroutine “AccelerVisByIPS”
Figura 2. 18 - Guadagno percentuale ottenuto nell’analisi tramite il FRT e l’accelerazione LSP attiva con l’introduzione della simmetrizzazione della matrice IPS unita all’accelerazione tramite la subroutine “AccelerVisByIPS” Guadagno percentuale 0 20 40 60 80 100 I II III ordine contributi G%
Figura 2. 19 – Diagramma di flusso relativo alla descrizione della prima fase della subroutine “AccelerVisByIPS”
Figura 2. 20 – Diagramma di flusso relativo alla descrizione della seconda fase della subroutine “AccelerVisByIPS”