5
Il FMS (Flight Management System)
5.1
Generalit`
a
Il FMS `e il sistema preposto alla gestione completa del velivolo durante l’in-tera missione, sia nelle fasi di volo pilotato sia in quelle gestite automatica-mente.
La filosofia progettuale della sua elaborazione e sviluppo, lo schema generale e gli interfacciamenti con gli altri componenti del rack sono descritti in ma-niera approfondita in [2], [3], [4] e [6].
Qui si ricordano brevemente i Sottosistemi che lo compongono e le principali funzioni che ognuno di esso espleta:
• Sottosistema Air Data: elabora i dati aria provenienti dai sensori di bordo (temperatura, pressione, ecc.) e li invia alla GCS per la visua-lizzazione; allo stato attuale del progetto i dati non sono ancora diret-tamente misurati ma calcolati nel modello del Simulatore e passati al FMS;
• Sottosistema Navigazione: sia tramite GPS sia Inerziale, elabora tutti i parametri di volo inerenti appunto alla navigazione;
• Sottosistema Autopilota: calcola i valori delle variazioni dei comandi ri-chieste per il soddisfacimento dei requisiti del sistema di autopilotaggio, in caso di passaggio alla gestione automatica del volo;
inviare ai sistemi di attuazione dei comandi e ne verifica il corretto funzionamento;
• Sottosistema Gestione del Volo: provvede alla gestione della missione sia in condizioni normali sia di emergenza, al monitoraggio dei sistemi e degli impianti, alla diagnostica di eventuali avarie con conseguente riprogrammazione o interruzione del volo.
Figura 5.1: Schema dei Sottosistemi del FMS
Il modello Simulinkr del FMS si rappresenta in Figura 5.2; all’interno del Blocco F, in Figura 5.3, si distinguono i vari Sottosistemi e si nota come
5.2
Modifiche apportate al FMS
5.2.1
Sottosistema Air Data System
Il Sottosistema di elaborazione dei dati aria riceve i segnali, allo stato attuale dello studio, direttamente dal Simulatore; montato a bordo, le grandezze in-teressate saranno misurate dai vari sensori di cui dispone l’UAV.
La sola modifica apportata `e quella di aggiungere la pressione dinamica DP a tali ingressi, nell’ottica di utilizzo di tale parametro per la scelta dei guadagni di chiusura dei sistemi di controllo variabili con le condizioni di volo, come gi`a accennato nelle verifiche al Simulatore dei vari autopiloti nel Capitolo 4. Gli ingressi provenienti dal GPS, ovvero la quota ed il coefficiente binario di guasto, vengono lasciati immutati.
In uscita invece si diversificano i parametri da inviare al Sottosistema Au-topilota da quelli destinati alla visualizzazione sulla strumentazione della GCS.
5.2.2
Sottosistema Navigazione
Anche il Sottosistema Navigazione riceve i segnali, allo stato attuale dello studio, direttamente dal Simulatore; montate a bordo le piattaforme inerzia-li e GPS, le grandezze interessate saranno fornite da tainerzia-li dispositivi.
La sola modifica apportata `e quella di aggiungere alle uscite la velocit`a lon-gitudinale in assi corpo UB, misurata dalla integrazione delle accelerazioni lineari in ingresso al blocco; questo parametro viene infatti utilizzato nei sis-temi di controllo con autothrottle, per la determinazione della variazione u in ingresso a tale SAS.
5.2.3
Sottosistema Autopilota
Il Sottosistema Autopilota deve essere in grado di effettuare il controllo in ciclo chiuso dei seguenti parametri:
• Quota di volo H ; • Velocit`a indicata IAS; • Velocit`a verticale Vz;
• Angolo di prua ψ (Heading); • Angolo di rotta η (Course); • Raggio del Circling;
• Navigazione tramite Waypoints; • Navigazione VOR.
I segnali di riferimento necessari ai singoli autopiloti vengono trasmessi al Blocco F.1 dal Sottosistema Air Data System (pressioni, temperatura ester-na, densit`a, incidenza, quota, velocit`a verticale ed indicata), dal Sottosistema di Navigazione Inerziale e GPS (accelerazioni, velocit`a angolari, angoli di Eu-lero, posizione, derapata, GSP, quota), dal Sottosistema di Controllo del volo (segnali del Joystick), dai sensori dell’apparato propulsivo (RPM, combusti-bile residuo, riserva) e dal pannello di strumentazione (interruttori generale e particolare di ogni autopilota, valori di riferimento); in uscita si costruisce il vettore delle deflessioni dei comandi e relativi interruttori, il quale viene inviato al Sottosistema di Controllo del volo.
Nelle Figure 5.6 e 5.7 si rappresenta quanto descritto e si mostra la suddivi-sione dei Blocchi dei sistemi di controllo.
Si passa ora ad esaminare in dettaglio l’integrazione di ogni autopilota nell’omo-nimo Sistema con particolare riguardo alle condizioni di ingaggio.
Autopilota della IAS
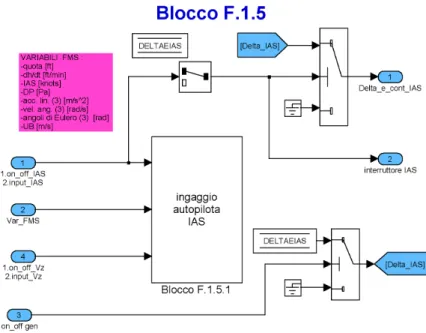
Il Blocco F.1.5 relativo all’autopilota della velocita indicata `e riportato in Figura 5.8. Si notano subito i blocchi Switch, che lasciano passare il segnale della variazione di equilibratore imposta dall’autopilota solo se l’interruttore generale del quadro autopiloti della strumentazione risulta acceso, e la cel-la di memoria DELTAEIAS cel-la cui inizializzazione permette di avviare cel-la simulazione.
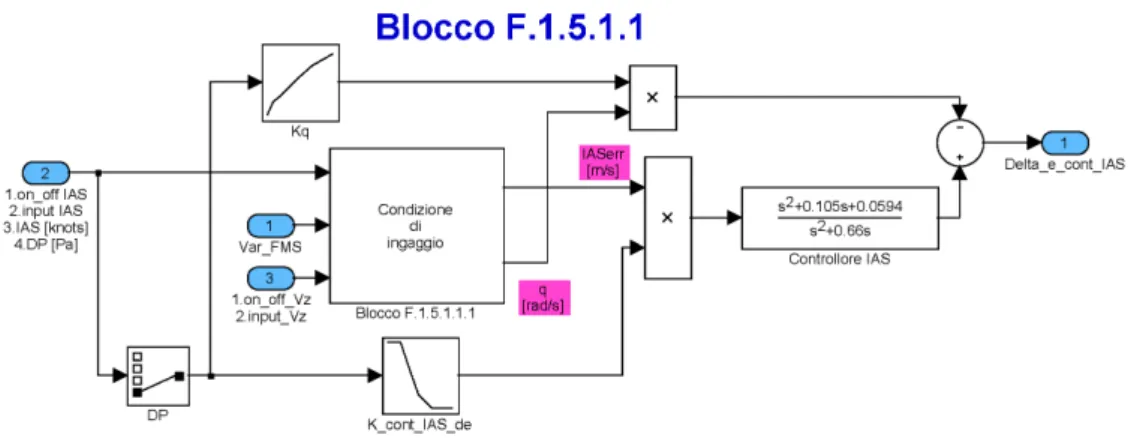
Il Blocco F.1.5.1, mostrato in Figura 5.9, contiene gli ulteriori sottosis-temi Blocco F.1.5.1.1 che comprende l’autopilota vero e proprio gi`a discusso nel §4.2.3 e Blocco F.1.5.1.1.1 che ne determina la condizione di ingaggio: nella mask del primo si caricano i files che contengono i guadagni utilizzati dall’autopilota, nell’altro si prevede il passaggio del vero errore della IAS, cio`e quello rispetto al riferimento inserito nel pannello della strumentazione, e del valore della variazione della velocit`a angolare di beccheggio q solo se l’interruttore particolare della IAS `e acceso e quello dell’autopilota della Vz
`
e spento.
Se questa condizione non `e verificata, vengono fatti passare due segnali nulli e l’autopilota non effettua alcun calcolo sui valori delle deflessioni.
L’autopilota della quota va lasciato spento per non causare conflitto di va-riabili controllate con lo stesso comando, cio`e l’equilibratore.
Nel Blocco F.1.5.1.1.1, sempre sotto la condizione di autopilota IAS acceso e Vz spento, si congela il valore iniziale della velocit`a q: rispetto ad esso si
calcola la variazione in ingresso al pitch damper.
Autopilota della velocit`a verticale Vz
Il Blocco F.1.2 fa uscire le variazioni di equilibratore e manetta, inizializzate nelle relative celle DEAVZ e DETHAVZ, solo se l’interruttore generale `e acceso.
Figura 5.12: Blocco F.1.2.2
Nella mask del Blocco F.1.2.1.1 si caricano i files che contengono i guada-gni utilizzati dall’autopilota: questo risiede nel Blocco F.1.2.1.1 e restituisce valori non nulli delle variazioni dei comandi solo se l’interuttore parziale della Vz risulta acceso e quello della IAS e della quota entrambi spenti.
Nel Blocco F.1.2.1.1.1, sempre sotto la stessa condizione, si congelano i valori iniziali delle velocit`a q ed UB : `e rispetto ad essi che si calcolano le variazioni in ingresso al pitch damper e all’autothrottle rispettivamente.
Nelle Figure che seguono si mostrano i Blocchi e la relativa condizione di ingaggio.
Autopilota della quota H
L’autopilota della quota viene essenzialmente inserito in caso di holding cio`e al fine del suo mantenimento.
Qui si `e voluto considerare anche il caso in cui si voglia attivarlo al fine del raggiungimento della quota desiderata, ad esempio al termine della manovra di decollo per portarsi in quota di crociera.
Quindi il primo controllo che si effettua `e quello sull’errore della quota stessa rispetto al riferimento inserito: se risulta minore di una prefissata soglia in effetti il sistema di controllo corregge la quota tramite equilibratore.
Nel caso in cui tale errore fosse ancora maggiore della soglia ci`o che si cor-regge `e la velocit`a verticale esattamente secondo le modalit`a relative a questo autopilota sopra descritte e rispetto al riferimento inserito nel quadro stru-mentazione se anche l’autopilota della Vz `e acceso oppure rispetto ad un
preimpostato rateo di salita se fosse attivo solo l’autopilota della quota. Nella Figura che segue si vede come il Blocco if che contiene la condizione sull’errore della quota comandi l’attivazione dell’uno o dell’altro sistema e come i segnali dei comandi siano, come sempre, inizializzati in celle di memo-ria, uniti nel Merge e con passaggio vincolato all’accensione dell’interruttore generale.
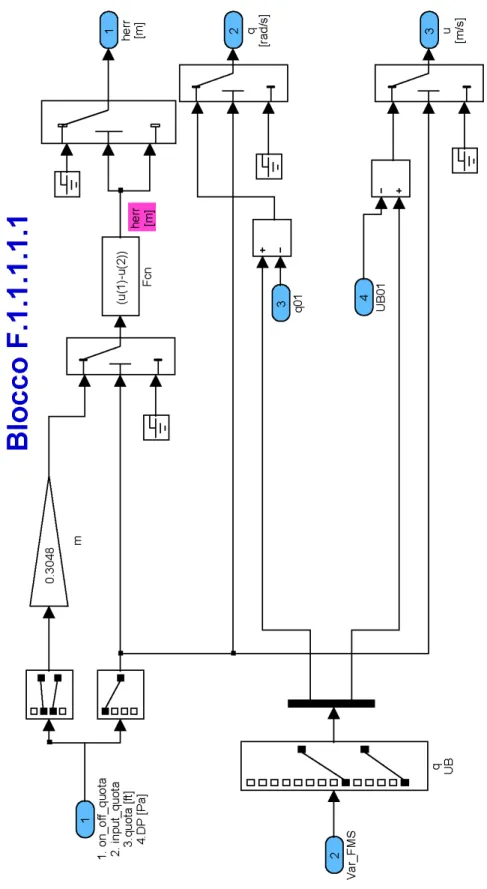
L’architettura del Blocco F.1.1.1 `e simile a quelli visti in precedenza; il controllore di tipo PD della quota risiede nel Blocco F.1.1.1.1, nella cui mask di inizializzazione vanno perci`o caricati i files dei guadagni di chiusura. Nel Blocco F.1.1.1.1.1 si nota che il calcolo dell’errore della quota rispetto al valore desiderato `e non nullo solo nel caso di autopilota relativo acceso: in tal caso si congelano anche i valori delle velocit`a q ed UB per determinare le variazioni in ingresso ai rispettivi SAS, ovvero il pitch damper e l’autothrottle.
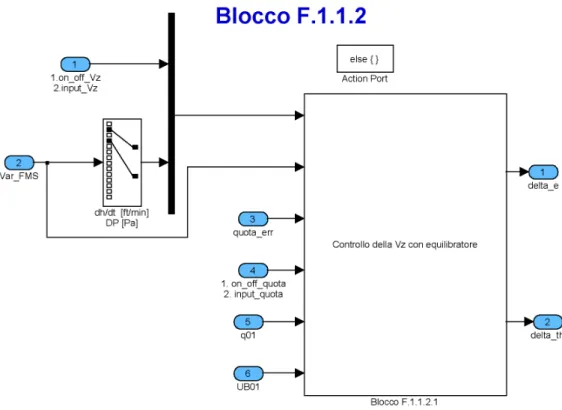
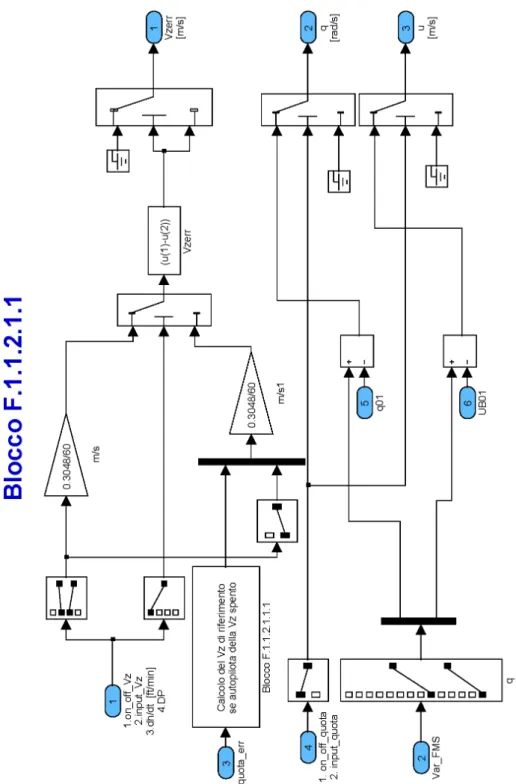
Il Blocco F.1.1.2 si diversifica dal Blocco F.1.2.2, relativo al caso di solo autopilota della Vz acceso, per via del terzo ingresso che `e proprio l’errore
sulla quota; questo serve nel caso di errore stesso maggiore della soglia e di autopilota della Vz spento, a determinare il segno del rateo di salita
preim-postato internamente nel Blocco F.1.1.2.1.1.
L’autopilota `e inserito nel Blocco F.1.1.2.1: le tabelle per la scelta dei guada-gni contengono valori memorizzati nella mask di inizializzazione del blocco stesso.
La logica del sistema ed il resto dell’architettura sono uguali all’autopilota della Vz.
L’autopilota della IAS deve essere spento per non causare un conflitto di variabili controllate con lo stesso comando, ovvero l’equilibratore.
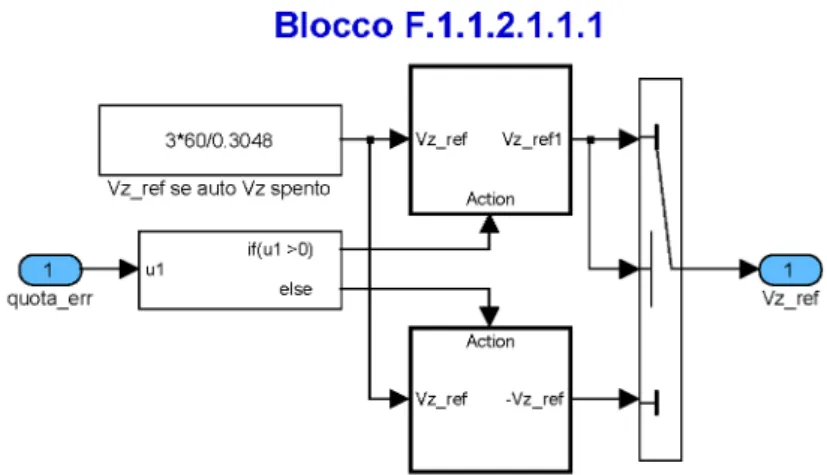
Nel Blocco F.1.1.2.1.1.1 si inserisce il valore della climb speed di riferi-mento nel caso di autopilota della Vz spento: in base al segno dell’errore
della quota si determina di conseguenza quello della velocit`a verticale di riferimento in tale condizione.
Autopilota dell’angolo di prua Ψ (Heading )
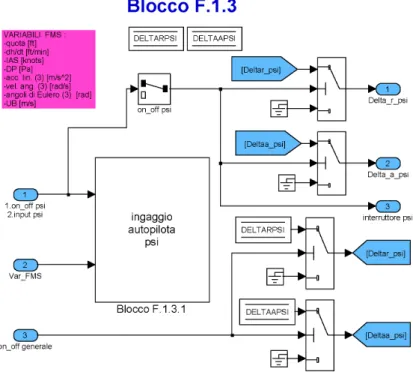
Il Blocco F.1.3 relativo a questo autopilota `e riportato in Figura 5.24. Come negli altri casi i blocchi Switch lasciano passare i segnali delle variazioni di timone e alettone imposte dall’autopilota solo se l’interruttore generale del quadro autopiloti della strumentazione risulta acceso e le celle di memo-ria DELTARPSI e DELTAAPSI, inizializzate a zero, permetteno di avviare correttamente la simulazione.
Figura 5.24: Blocco F.1.3
Il Blocco F.1.3.1, mostrato in Figura 5.25, contiene gli ulteriori sottosis-temi Blocco F.1.3.1.1 che comprende l’autopilota vero e proprio gi`a discusso nel §4.3.2 e Blocco F.1.3.1.1.1 che ne determina la condizione di ingaggio: in quest’ultimo si prevede il passaggio del vero errore della ψ, cio`e quello rispet-to al riferimenrispet-to inseririspet-to nel pannello della strumentazione, e della variazione della velocit`a angolare di imbardata r in ingresso allo yaw damper, rispetto al proprio valore iniziale congelato, solo se l’interruttore particolare della ψ risulta acceso.
Figura 5.25: Blocco F.1.3.1
Autopilota dell’angolo di rotta η (Course)
Il Blocco F.1.4 relativo a questo autopilota `e riportato in Figura 5.28. Si fa sempre uso dei blocchi Switch per lasciar passare il segnale della va-riazione di timone imposta dall’autopilota solo se l’interruttore generale del quadro autopiloti della strumentazione risulta acceso e della cella di memoria DELTARETA, inizializzata a zero, per avviare correttamente la simulazione. In ingresso al blocco si trova anche l’angolo di derapata β calcolato nel Sot-tosistema Navigazione Inerziale che viene sommato all’angolo di prua ψ a dare appunto la rotta η.
Figura 5.28: Blocco F.1.4
Il Blocco F.1.4.1, mostrato in Figura 5.29, contiene gli ulteriori sotto-sistemi Blocco F.1.4.1.1 dove risiede l’autopilota vero e proprio gi`a discusso nel §4.3.3 e Blocco F.1.4.1.1.1 che ne determina la condizione di ingaggio: in quest’ultimo si prevede, come negli altri casi, il passaggio del vero errore della η, cio`e quello rispetto al riferimento inserito nel pannello della stru-mentazione, e della variazione della velocit`a angolare di imbardata r solo se l’interruttore particolare della η risulta acceso.
Figura 5.29: Blocco F.1.4.1
Autopilota del circling
Il Blocco F.1.6 relativo a questo autopilota `e riportato in Figura 5.32. Come gi`a discusso nel §4.3.4 l’impostazione di un desiderato raggio di cur-vatura R implica in realt`a il controllo sull’angolo φ detto angolo di bank, rispetto ad un valore di riferimento che dipende da R stesso e dalla velocit`a V.
I blocchi Switch lasciano passare il segnale delle deflessioni di alettone e di timone imposte dall’autopilota solo se l’interruttore generale del quadro autopiloti della strumentazione risulta acceso; inoltre le celle di memoria DELTARC e DELTAAC, inizializzate a zero, permettono di avviare corret-tamente la simulazione.
In ingresso al blocco si trova anche il vettore Air data dal quale si estra-pola la densit`a dell’aria ρ per il calcolo di V a partire dalla IAS nel Blocco F.1.6.1.1.1.1.
In uscita al Blocco F.1.6.1 si scrivono i segnali delle variazioni dei comandi nelle relative celle di memoria.
Figura 5.33: Blocco F.1.6.1
Nelle Figure che seguono si riportano tutti i Blocchi che costituiscono i sottosistemi dell’autopilota.
Si vede come nel Blocco F.1.6.1.1.1.1 si costruisce il valore φref di riferimento
per l’autopilota che risiede nel Blocco F.1.6.1.1; anche in tal caso valori non nulli dell’errore e della variazione di r sono fatti passare, verso il controllore dell’autopiota e lo yaw damper rispettivamente, solo se l’interruttore parti-colare di questo autopilota risulta acceso.
In caso contrario, anche se l’interruttore generale `e acceso, l’autopilota mette a zero le variazioni dei comandi richieste.
Nel Blocco F.1.6.1.2 infine si ridetermina il valore attuale del raggio R per la verifica del corretto funzionamento del sistema di controllo.
Figura 5.35: Blocco F.1.6.1.1.1
Autopilota di navigazione verso un WP (WayPoint )
Il Blocco F.1.7 relativo a questo autopilota `e riportato in Figura 5.38. Come per gli altri autopiloti il passaggio delle deflessioni dei comandi, scritte nelle apposite celle di memoria DELTAAWP e DELTARWP `e subordinato all’accensione dell’interruttore generale.
Figura 5.38: Blocco F.1.7
Il sistema di controllo e le tabelle per la determinazione dei guadagni di chiusura risiedono nel Blocco F.1.7.1.
Nella condizione di ingaggio si calcolano valori non nulli dell’errore della rotta η e della variazione della velocit`a angolare di imbardata r solo se l’in-terruttore di questo particolare autopilota `e acceso.
Nel Blocco F.1.7.1.1.2 si determina il valore del rilevamento polare rispet-to al punrispet-to di arrivo parziale: quesrispet-to viene corretrispet-to, nel blocco denominarispet-to Correzione, di una quantit`a proporzionale alla sua differenza con il rileva-mento polare attuale e va a costituire il segnale di riferirileva-mento istantaneo per l’angolo η.
La relazione utilizzata `e la (4.11) del §4.3.5: si distingue il rilevamento iniziale ogni volta che si ha il passaggio ad un nuovo waypoint, sempre comandato dalla variabile Controllo.
Nel Blocco F.1.7.1.1.1 assume particolare rilievo il cambiamento di way-point tra quelli selezionati sulla periferica Mappa e passati dal pannello stru-mentazione al FMS: la condizione di passaggio al successivo riferimento `e posta sulla distanza dal waypoint gi`a attivo ed `e resa possibile dal cam-biamento di valore della variabile Controllo, come mostrato nelle successive Figure. L’avvicinarsi in un prefissato intorno del punto di destinazione par-ziale fa aumentare di una unit`a la variabile suddetta e permette l’aquisizione delle nuove coordinate: il passaggio si mostra nel Blocco F.1.7.1.1.1.1. A partire dall’istante in cui l’autopilota risulta attivo, si determina la rotta seguita nell’avvicinamento al waypoint, secondo la propria definizione.
Autopilota di navigazione VOR
Il Blocco F.1.8 relativo a questo autopilota `e riportato in Figura 5.45. Come per gli altri autopiloti il passaggio delle deflessioni dei comandi, scritte nelle apposite celle di memoria DELTAAVOR e DELTARVOR `e subordina-to all’accensione dell’interrutsubordina-tore generale. L’ausubordina-topilota risiede nel Blocco F.1.8.1.
Figura 5.45: Blocco F.1.8
Nella condizione di ingaggio si fanno passare l’errore di η e la variazione di r, e non segnali nulli, solo se l’interruttore del VOR `e acceso: ci`o alleggerisce la quantit`a di calcoli del sistema.
Figura 5.47: Blocco F.1.8.1.1
Nel Blocco F.1.8.1.1.1 si fa ampio uso di goto e from per dividere ed ordinare le grandezze in ingresso ai successivi sottoblocchi. L’effettiva determinazione della η di riferimento avviene nel Blocco F.1.8.1.1.1A dove si distinguono le due fasi della manovra gi`a descritte nel §4.3.6: in uscita dai sottoblocchi A1 e A2, alternativamente attivati in base alla distanza d dalla radiale selezio-nata, si trovano i rilevamenti polari attuali rispetto al punto C o al punto B. Questi sono utilizzati nei sottoblocchi SUBSYSTEM 1 e 2 per la determina-zione del riferimento secondo le relazioni (4.13) e (4.14).
In uscita dal Blocco F.1.8.1.1.1A1 si trovano anche la distanza dalla radiale ed il rilevamento polare tra C e B, utilizzato nel SUBSYSTEM 1 per de-terminare, una volta raggiunto il punto C, la direzione di virata che porti il velivolo al punto di arrivo B.
Figura 5.50: Blocco F.1.8.1.1.1A1
Figura 5.52: SUBSYSTEM 1