1.
2.
3.
4.
5.
6. INVILUPPO DI CARICO DELLA CODA ORIZZONTALE
NELL’IPOTESI DI VELIVOLO RIGIDO.
6.1 - INTRODUZIONE.
Nel seguente capitolo si studiano gli andamenti temporali delle variazioni della forza di portanza e del momento delle forze aerodinamiche complessivamente agenti sulla coda orizzontale. Questi sono connessi alla dinamica del velivolo che si sviluppa negli istanti successivi la deflessione dell’equilibratore a partire da prefissate condizioni di trim. Le condizioni di trim prese in considerazione sono quelle indicate dalla normativa. Tali risultanti sono pensate applicate nel punto corrispondente alla proiezione lungo l’asse longitudinale del velivolo del centro aerodinamico della superficie portante posteriore, ovvero del punto individuato al 25 % della corda media aerodinamica del piano di coda orizzontale.
Nei secondi che seguono l’inizio della manovra, i carichi risultanti presentano oscillazioni che implicano picchi di sollecitazione sulla base dei quali viene determinato l’inviluppo dei carichi in coda finalizzato ad individuare i carichi di progetto per la struttura.
6.2 - PORTANZA E MOMENTO AERODINAMICO COMPLESSIVIAMENTE AGENTI SULLA CODA ORIZZONTALE INDOTTI DA UNA MANOVRA. La forza portante L ed il momento delle forze aerodinamiche agenti sulla coda orizzontale del velivolo risultano funzione di due grandezze fondamentali:
tail Mtail
• L’angolo d’incidenza dello stabilizzatore αS. • L’angolo di deflessione dell’elevatore δ . e
Sulla base delle ipotesi relative alla geometria del piano di coda orizzontale, ovvero profilo alare simmetrico ed assenza di svergolamento, il contributo al momento
aerodinamico dovuto alla curvatura del profilo è nullo. L’incremento di portanza e di momento aerodinamico ∆ (rispetto al 25 % della corda media aerodinamica dello stabilizzatore), conseguenti all’azionamento del comando e alla risposta del velivolo, si possono scrivere nella seguente forma:
tail L ∆ tail M e L L Ltail S e S α δ δ α ∆ + = ∆ e M M Mtail = αS∆αS + δeδ ∆
I termini ed rappresentano rispettivamente la portanza ed il momento delle forze aerodinamiche sulla coda orizzontale isolata dovuti ad una variazione unitaria dell’angolo d’incidenza
S
Lα MαS
S
α . Analogamente, L ed sono i contributi connessi ad una deflessione dell’equilibratore di un angolo e δ e e Mδ
δ unitario. Esplicitando le precedenti relazioni in funzione degli opportuni coefficienti aerodinamici si ricava:
(
C)
q S(
C)
eS q
Ltail = t t Lα tail∆αS + t t Lδe tailδ ∆
(
C)
q S c(
C)
e c S q M S t t t Me tail tail M t t t tail = αS ∆α + δ δ ∆La quantità ∆αS rappresenta la variazione dell’angolo d’incidenza della coda dovuta alla risposta del velivolo conseguente la manovra rispetto al valore di trim αS : questa è funzione a sua volta della variazione dell’angolo d’incidenza dell’ala ∆αwb anche per effetto del “downwash” che influenza la coda. Definita εαw la variazione percentuale dell’angolo di “downwash” in corrispondenza della coda dovuta ad una varizione unitaria dell’incidenza dell’ala, risulta:
(
w)
w
S α εα
α =∆ −
∆ 1
L’angolo di rotazione della superficie mobile dell’equilibratore δe è valutato dalla posizione assunta al trim:
( )
δe trim =0; in tutte le manovre effettuate in corrispondenza delle condizioni di trim esaminate la superficie mobile di comando raggiunge la massima deflessione possibile, ovvero, tale da far raggiungere al fattore di carico il valore limite consentito desunto dal diagramma di manovra per la condizione operativa considerata.Il coefficiente C con il quale si determina il contributo al momento aerodinamico agente sulla coda in funzione dell’angolo
S Mα
S
α , è noto sperimentalmente: in particolare si conosce l’andamento in funzione del numero di mach rappresentato nella figura 6.1.
La forza di portanza L ed il momento M presenti sulla coda sono forniti quindi dalle seguenti relazioni:
tail tail
( )
tail trim tailtail L L
L = +∆
(
tail)
trim tailtail M M
Fig. 6.1: Andamento sperimentale del coefficiente C al variare del mach. S
Mα
6.3 - COSTRUZIONE DELL’INVILUPPO DI CARICO DELLA CODA ORIZZONTALE.
La costruzione dell’inviluppo di carico della coda orizzontale conseguente manovre simmetriche viene eseguita sulla base di un’analisi dei carichi che sollecitano il velivolo, in riferimento al paragrafo 331 della normativa FAR 25 vigente. Secondo questi regolamenti è necessario prendere in considerazione condizioni di volo di tipo sia “in-trim” sia “out-of-trim” e tenere conto degli effetti della velocità di “pitch” che ne consegue.
In particolare la FAR 25.331 (b) relativamente alle “maneuvering balanced conditions” prescrive di verificare tutte le condizioni operative corrispondenti al valore limite sia positivo sia negativo del fattore di carico assumendo che il velivolo si trovi in equilibrio con accelerazione di beccheggio nulla. Ciò implica di dover verificare tutte quelle condizioni operative corrispondenti ai vertici del generico diagramma di manovra, riportato in figura 6.2. Tali vertici nell’ipotesi di velivolo rigido sono sempre identificati
Fig. 6.2: Esempio di un generico diagramma di manovra.
dalle velocità equivalenti V e V al valore limite positivo del fattore di carico pari al valore 2.5 e dalle velocità equivalenti V e V al valore limite negativo del fattore di
carico pari a -1.
Acomp D
H C
Come rappresentato nella figura 6.2, la velocità V è la minima velocità equivalente che consente in ogni condizione operativa di raggiungere il massimo valore del fattore di carico tenuto conto dell’effetto della comprimibilità del flusso, come anticipato nel paragrafo 4.11.
Acomp
La FAR 25.331 (c) tratta delle “pitch maneuver conditions” dovute alla rotazione della superficie mobile dell’equilibratore.
Il sottocapitolo FAR 25.331 (c) (1) relativo al massimo spostamento del comando d’equilibratore prescrive di assumere che il velivolo sia in volo livellato a fattore di carico unitario con velocità equivalente pari alla V (punto individuato sul diagramma di manovra dall’intersezione tra la retta orizzontale per
A
1 =
Z
per effettuare una “manovra di pitch” ruotando rapidamente il comando. In questo modo il velivolo è soggetto ad una elevata accelerazione in beccheggio. Per definire il carico in coda occorre prendere in esame la risposta del velivolo. I carichi successivi all’istante in cui il fattore di carico n raggiunge il valore limite positivo consentito in corrispondenza della V o all’istante in cui il carico normale agente in coda raggiunge il proprio picco massimo non devono essere presi in considerazione. Questo tipo di manovra viene simulata mediante l’applicazione di un comando a rampa a partire dal trim alla V , per tutte le condizioni operative prese in esame. Il comando a rampa applicato è, secondo la convenzione adottata, sia “negativo” che “positivo”, ovvero nel primo caso il velivolo è portato a cabrare (“nose up”), nel secondo a picchiare (“nose down”). Nel caso “nose down” il valore limite negativo del fattore di carico fatto raggiungere al velivolo durante la manovra è pari a -1.
z A
A
Il sottocapitolo FAR 25.331 (c) (2), relativo ad uno spostamento “controllato” dell’equilibratore, prescrive di verificare i carichi agenti sulla struttura in seguito a manovre simulate mediante una deflessione dell’equilibratore che rispetti una opportuna legge temporale, in modo che il valore limite positivo del fattore di carico non venga superato. Nella simulazione di tali manovre l’accelerazione di “pitch” cui il velivolo è soggetto non può essere inferiore ai valori prefissati nella FAR 25.331 (c) (2) (i) (ii) ad eccezione del caso in cui valori inferiori a questi non possano essere superati. In questo lavoro tale tipologia di manovra viene simulata mediante l’applicazione di un comando che fa seguire all’angolo di deflessione dell’equilibratore una legge di moto sinusoidale in corrispondenza del trim alla V e V per tutte le condizioni operative prese in esame. Il comando sinusoidale è anch’esso di due tipi: il primo tipo è caratterizzato dalla prima semionda del comando “negativa”, tale cioè da far ruotare inizialmente verso l’alto il muso del velivolo (“nose up”); il secondo tipo ha la prima semionda “positiva“, ovvero tale da far ruotare inizialmente il muso verso il basso (“nose down”).
A D
La costruzione dell’inviluppo di carico della coda orizzontale viene effettuata ricercando i massimi picchi sia positivi sia negativi delle sollecitazioni agenti sulla coda medesima secondo i principi illustrati. Nel fare questo si analizzano tutte le condizioni operative fissate in precedenza nel paragrafo 4.11. In particolare si determinano i picchi massimi assoluti del carico portante ed il corrispondente momento aerodinamico agente sulla coda orizzontale nelle seguenti condizioni:
1. In volo equilibrato a fattore di carico massimo positivo (2.5) per velocità equivalente pari alla VAcomp.
2. In volo equilibrato a fattore di carico massimo positivo (2.5) per velocità equivalente pari alla VD.
3. In volo equilibrato a fattore di carico massimo negativo (-1) per velocità equivalente pari alla VH.
4. In volo equilibrato a fattore di carico massimo negativo (-1) per velocità equivalente pari alla V . C
5. In risposta ad un comando di equilibratore a rampa e sinusoidale sia positivo che negativo, assumendo che il velivolo sia inizialmente in condizioni di trim a fattore di carico unitario ad una velocità equivalente pari a V e raggiunga con la manovra il valore limite positivo consentito del fattore di carico, desumibile dal relativo diagramma di manovra.
A
6. In risposta ad un comando di equilibratore sinusoidale sia positivo che negativo, assumendo che il velivolo sia inizialmente in condizioni di trim a fattore di carico unitario ad una velocità equivalente pari a V e raggiunga con la manovra il valore limite positivo consentito del fattore di carico (sempre 2.5 nel caso di velivolo rigido).
D
Questa analisi fornisce per ciascuna delle 6 precedenti condizioni un determinato “punto di carico” individuato da una coppia di valori
(
M ,tail Ltail)
tail
. L’unione di questi punti, mediante dei segmenti tali da costruire un poligono contenete all’interno tutti i “punti di carico” di minore sollecitazione, consente di individuare su un sistema di riferimento biassiale, avente sull’asse delle ascisse il valore del momento aerodinamico M ed in ordinata la portanza della coda , un’area che definisce l’inviluppo di carico cercato. In esso sono rappresentate tutte le possibili sollecitazioni L ed M alle quali può essere sottoposta la struttura della coda orizzontale: come detto ciò consente di interpretare le
tail tail
L
condizioni limite d’equilibrio e le risposte del velivolo in termini di sollecitazioni L ed
agenti in coda traducendole nelle possibili condizioni di carico limite alle quali la struttura deve resistere.
tail tail
M
Nella figura 6.3 che segue è rappresentato l’inviluppo di carico risultato di questo studio; in essa vengono anche contrassegnati con il simbolo asterisco tutti i punti di carico interni all’inviluppo medesimo determinati mediante l’analisi svolta.
Nelle tabelle riassuntive 6.1 sono indicati i valori delle sollecitazioni L , (le cui unità di misura sono rispettivamente [Lb], [Lb*Ft]) e le relative condizioni operative corrispondenti ai vertici 1-7 indicati nella medesima figura.
tail Mtail
RAMP INPUT AT
VANOSE DOWN
CONDIZIONE DI VOLO M = 0.32 H = 0 [Ft] CONDIZIONE OPERATIVA N° SOLLECITAZIONI ( [Lb] e [Lb*Ft] ) PESO VELIVOLO [Lb] POSIZIONE BARICENTRO [% mac] 1 =2.81⋅104 tail L =−5.98⋅105 tail M 77700 0.45BALANCED MANEUVER AT
VC(−nZ) CONDIZIONE DI VOLO M = 0.78 H = 20000 [Ft] CONDIZIONE OPERATIVAN° SOLLECITAZIONI ( [Lb] e [Lb*Ft] ) VELIVOLO PESO
[Lb] POSIZIONE BARICENTRO [% mac] 2 Ltail =−1.77⋅104 =−1.28⋅106 tail M 77700 0.45
SIN INPUT AT
VDNOSE UP
CONDIZIONE DI VOLO M = 0.65 H = 0 [Ft] CONDIZIONE OPERATIVA
N° SOLLECITAZIONI ( [Lb] e [Lb*Ft] ) VELIVOLO PESO
[Lb] POSIZIONE BARICENTRO [% mac] 3 Ltail =−6.69⋅104 =1.90⋅106 tail M 77700 0.15
SIN INPUT AT
VANOSE UP
CONDIZIONE DI VOLO M = 0.31 H = 0 [Ft] CONDIZIONE OPERATIVA N° SOLLECITAZIONI ( [Lb] e [Lb*Ft] ) PESO VELIVOLO [Lb] POSIZIONE BARICENTRO [% mac] 4 =−7.02⋅104 tail L =2.25⋅106 tail M 77700 0.15RAMP INPUT AT
VANOSE UP
CONDIZIONE DI VOLOM = 0.31 H = 0 [Ft] CONDIZIONE OPERATIVA
N° SOLLECITAZIONI ( [Lb] e [Lb*Ft] ) VELIVOLO PESO
[Lb] POSIZIONE BARICENTRO [% mac] 5 Ltail =−6.97⋅104 =2.31⋅106 tail M 77700 0.15
RAMP INPUT AT
VANOSE DOWN
CONDIZIONE DI VOLO M = 0.31 H = 0 [Ft] CONDIZIONE OPERATIVA
N° SOLLECITAZIONI ( [Lb] e [Lb*Ft] ) VELIVOLO PESO
[Lb] POSIZIONE BARICENTRO [% mac] 6 Ltail =−5.52⋅104 =2.26⋅106 tail M 77700 0.15
BALANCED MANEUVER AT
VD(+nZ) CONDIZIONE DI VOLO M = 0.65 H = 0 [Ft] CONDIZIONE OPERATIVA N° SOLLECITAZIONI ( [Lb] e [Lb*Ft] ) PESO VELIVOLO [Lb] POSIZIONE BARICENTRO [% mac] 7 =−2.22⋅104 tail L =1.78⋅106 tail M 77700 0.15Tab. 6.1: Valori identificativi e condizioni di volo corrispondenti ai vertici dell’inviluppo.
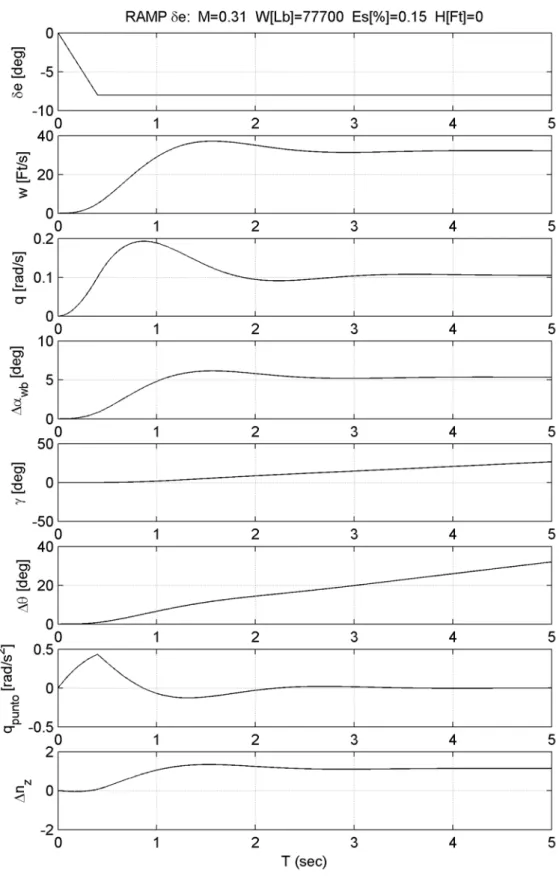
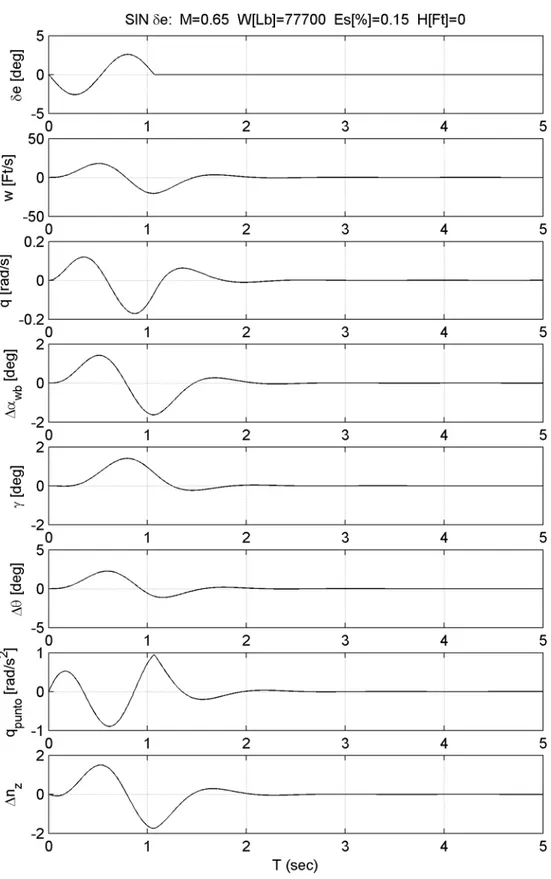
A titolo d’esempio, nelle figure 6.4 - 6.9 che seguono sono rappresentate le risposte temporali del velivolo ad un comando d’equilibratore rispettivamente a rampa e sinusoidale tale da fare cabrare il velivolo. Le condizioni di trim considerate sono quelle indicate nelle medesime figure. Da queste derivano i punti di carico 3, 5 indicati in precedenza. Sono rappresentati gli andamenti delle variazioni delle grandezze fisiche che caratterizzano la dinamica del velivolo, in particolare la variazione dell’incidenza dell’ala
wb α
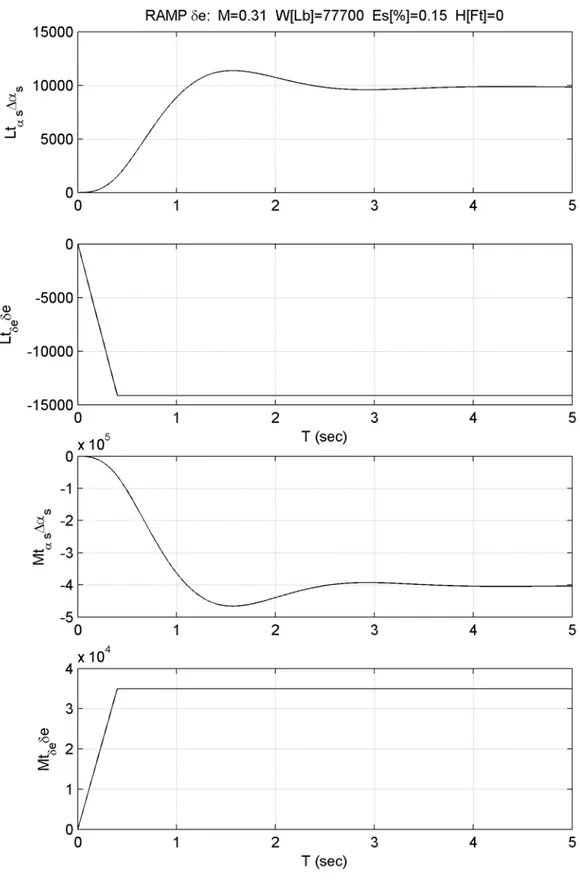
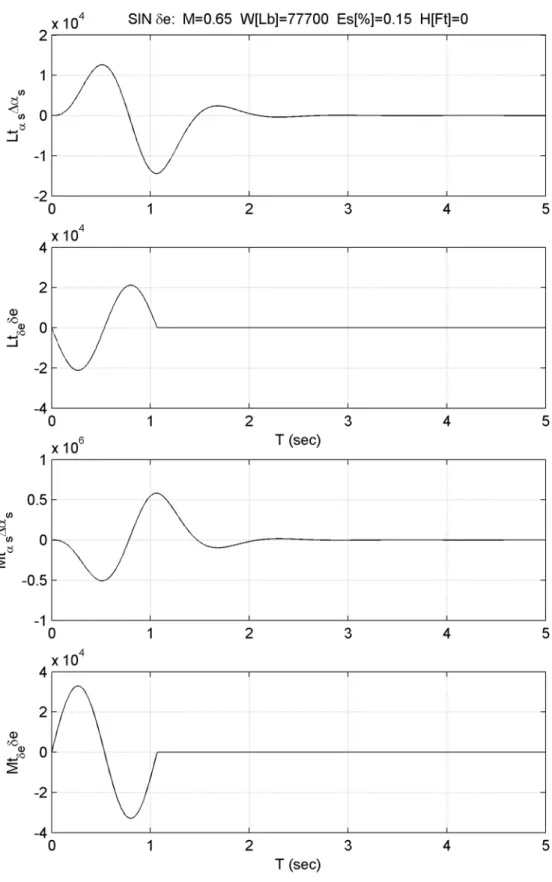
∆ , dell’accelerazione angolare q e del fattore di carico & ∆nz. Seguono gli andamenti temporali dei contributi parziali alla portanza ed al momento aerodinamico agenti complessivamente sulla coda orizzontale dovuti rispettivamente alla variazione dalla condizione di trim dell’incidenza della coda ed alla deflessione dell’equilibratore; si tratta delle grandezze LαS∆αS, MαS∆αS, Lδeδe, Mδeδe discusse nel precedente paragrafo 2. Infine sono riportati gli andamenti temporali del carico portante L e del momento aerodinamico agenti in coda.
tail tail
M
Le analisi degli andamenti di L ed precedentemente determinati validi nell’ipotesi di velivolo rigido consentono di fare alcune considerazioni di carattere generale.
tail Mtail
Nelle risposte al comando a rampa riportate nella figura 6.6 si riscontrano oscillazioni del carico complessivo L nell’intorno del valore di regime nella dinamica di corto periodo.
L’intensità di tali oscillazioni è legata alla posizione del centro di gravità del velivolo
rispetto al centro aerodinamico del sistema ala-fusoliera. Il momento aerodinamico complessivo subisce nei primi secondi una forte escursione alla quale segue una limitata oscillazione nell’intorno del valore di assestamento secondo la dinamica di corto periodo. Inoltre l’istante in cui si manifesta il massimo relativo superiore per L coincide
con quello in cui si manifesta il massimo picco inferiore per M .
tail M tail M tail tail
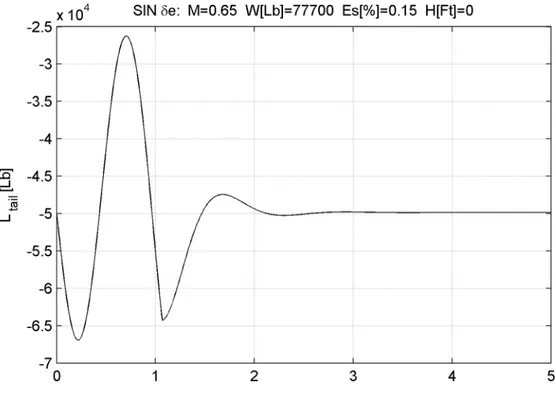
Nelle risposte al comando sinusoidale riportate nella figura 6.9 si hanno forti escursioni per ed nell’intorno dei valori di regime nella dinamica di corto, i quali sono coincidenti con quelli iniziali dal momento che l’angolo di deflessione della superficie di controllo torna nella posizione iniziale assunta al trim.
tail
L
Nell’appendice (A) vengono riportate altre risposte temporali del velivolo ipotizzato infinitamente rigido per ogni tipologia di manovra simmetrica simulata (comando di equilibratore a rampa e sinusoidale di tipo sia “nose-up” sia “nose-down”).
Fig. 6.4: Risposte temporali del velivolo ad un comando a rampa d’equilibratore nelle condizioni indicate.
Fig. 6.5: Andamento temporale dei contributi parziali alla portanza e al momento aerodinamico totali agenti sulla coda orizzontale per un comando a rampa d’equilibratore nelle condizioni indicate.
Fig. 6.6: Storia di carico agente sulla coda orizzontale conseguente un comando a rampa d’equilibratore nelle condizioni indicate.
Fig. 6.7: Risposte temporali del velivolo ad un comando sinusoidale d’equilibratore nelle condizioni indicate.
Fig. 6.8: Andamento temporale dei contributi parziali alla portanza e al momento aerodinamico totali agenti sulla coda orizzontale per un comando sinusoidale d’equilibratore nelle condizioni indicate.
Fig. 6.9: Storia di carico agente sulla coda orizzontale conseguente un comando sinusoidale d’equilibratore nelle condizioni indicate.